
基于表面肌电的肌肉舒适度评价准则
2017-04-07 09:16张丽珍杨加庆杨朦朦陶宁蓉
中国机械工程 2017年6期
张丽珍 邵 祺 杨加庆 杨朦朦 陶宁蓉 宋 政 戴 鹏
1.上海海洋大学工程学院,上海,2013062.上海汽车集团股份有限公司乘用车公司,上海,201804
基于表面肌电的肌肉舒适度评价准则
张丽珍1邵 祺1杨加庆1杨朦朦1陶宁蓉1宋 政2戴 鹏2
1.上海海洋大学工程学院,上海,2013062.上海汽车集团股份有限公司乘用车公司,上海,201804
为了避免操作人员长期处于较差的姿势工作,选取人体上身5个关节进行动作试验,对每个动作变化起主要作用的肌肉块进行了肌电信号测试。通过最大主动收缩法消除不同受试者的肌电信号差异,对肌电百分比值进行归一化和加权平均法处理,根据每个动作变化涉及肌肉的平均生理横断面积,给出复合动作肌肉舒适度指数的计算方法;提出了一套基于表面肌电的肌肉舒适度评价准则,与DELMIA人机仿真软件中的RULA分析结果对比显示,该评价准则具有可行性,适合对操作人员的作业姿势进行评价。
表面肌电;肌肉舒适度;评价准则;试验;仿真
0 引言
在生产制造中,许多生产作业仍依赖于手工操作,操作条件的不恰当使得操作人员长时间处于较差的姿势工作,作业效率较低且满意度不高,同时,较差的作业姿势会导致肌肉骨骼疾病的发生[1]。在我国,人机工程学在生产作业中的应用较少,生产中的设备工装设计对人机工程学的考虑还不够,对操作人员作业姿势的舒适程度缺乏系统的评价手段[2-3]。
在国外,1977 年芬兰学者KARHU等[4]提出了工作姿势分析系统(Ovako working posture analysis system,OWAS),其主要功能是判断工作时的身体姿势,并按照身体姿势可能引发伤害的程度来区分等级。1993年英国诺丁汉大学McATAMNEY等[5]开发了快速上肢评价(rapid upper limb assessment,RULA)法,RULA法根据人体上肢各部分的姿势、用力情况进行评分。2000年HIGNETT等[6]提出了快速全身评估(rapid entire body assessment,REBA)法,REBA法依据工作姿势不同的角度,分别给出不同的得分,提出改良建议。
上述研究成果为人体舒适度评价准则的建立提供了指导。虽然以上评价准则在实际生产生活中得到了应用,但是已有文献[7]指出以上评价准则较为主观,另外国内外研究较少涉及评价准则的建立。鉴于此,本文研究了人体上身关节转角的变化特征,借助生理记录测试系统测得随关节角度变化的肌电信号,结合生物力学中表面肌电的相关理论,提出了一套基于表面肌电的人体肌肉舒适度评价准则,同时将评价准则应用到汽车左翼子板装配工序的静态作业姿势中,通过与DELMIA人机软件中的RULA分析模块对比发现,该评价准则具有可行性。
1 表面肌电试验
1.1 试验对象和测试系统
受试者为20名男性大学生志愿者,身体健康,试验前两周内无激烈体力活动,无肌肉损伤。年龄(23.5±1.36)岁,身高(178.0±1.52)cm,体重(64.3±4.88)kg,均健康,无肌肉疾病和疲劳症状。试验测试系统由计算机软件Acq4.2、生理记录仪、皮肤表面电极和运动胶带组成。生理记录仪由美国BIOPAC公司生产,共有16个模拟数据采集通道,采样频率可以自由设定。试验时将采样频率调至1250 Hz,滤波器低频截止频率设置为50 Hz。
1.2 试验方案
人体上半身的所有运动由头部、躯干、肩关节、肘关节和腕关节所完成,选取此5个关节进行动作试验。受试者做出的动作由多块肌肉共同作用完成,试验中选取对每个动作起主要作用的肌肉块,对动作变化后的肌电进行研究。具体选取的动作变化类型、动作范围、主要作用肌肉块见表1和图1。
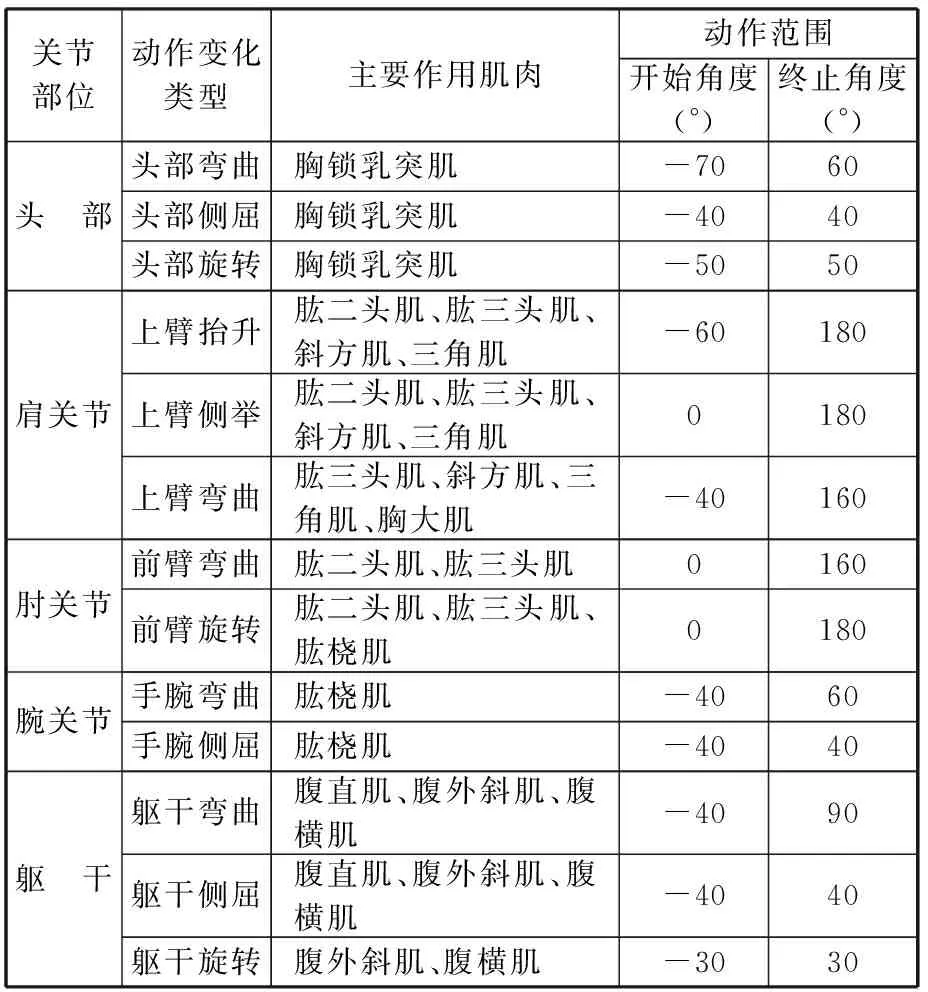
表1 试验中测试的动作、肌肉和动作范围
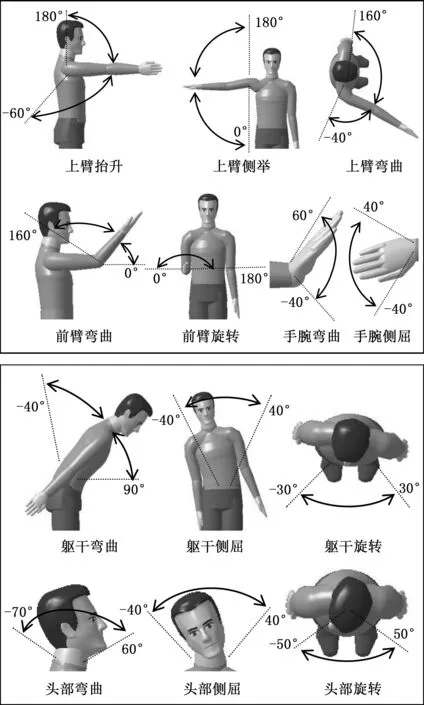
图1 上半身各关节的动作变化类型Fig.1 Motions variation type of upper limb joints
试验中根据受试者肌肉体积的大小选用了不同长度的电极进行测量,依据不同的肌肉类型,用运动胶布将电极粘贴到准确位置上,具体可见图2a。

(a)电极的粘贴 (b)动作变化过程图2 试验时电极的粘贴及动作变化过程Fig.2 Electrodes paste andmotions variation process in experiment
受试者按照图2中每个关节含有的动作变化类型和动作范围做出肢体变化,每个动作变化的角度增量为10°,每个动作试验进行2次。例如“上臂侧举”动作,如图2b所示,受试者站在试验坐标系前,试验时肩关节以坐标系中心为变化中心,根据坐标系上的分度线摆放手臂的位置,向体侧以10°为一个增量举起手臂,每个动作保持时间为10 s,然后通过生理记录仪记录主要作用肌肉的肌电信号。试验时根据每个关节不同动作的自由度即动作范围来确定动作变化的次数,例如“上臂侧举”动作是以肩关节为变化中心,其动作范围为0~180°,每个动作以10°为一个增量变化并保持10 s,所以该动作需要做19次。
2 数据处理与分析
通过试验得到了所有受试者每个动作变化之后的肌电信号,利用肌电信号计算出其均方根(root mean squared,RMS)值,通过最大主动收缩(maximum voluntary contraction, MVC)法消除不同受试者的肌电信号差异。为了便于比较每个动作随角度变化的数据,对肌电百分比值进行归一化和加权平均处理。
2.1 最大主动收缩肌电百分比
利用最大主动收缩法对肌电信号振幅标准化[8],根据每块肌肉的解剖结构和生理功能,设计了不同动作让受试者使出最大肌力,测定它们的最大主动收缩状态下的肌电信号即可得出时域指标MRMS。时域指标MRMS是最大主动收缩状态下的肌电信号均方根值,时域指标ARMS是受试者动作试验实际测得的肌电信号均方根值。将动作试验测得的时域指标ARMS与最大主动收缩时域指标MRMS的比值作为标准化值即最大主动收缩肌电百分比:
(1)
式中,ARMSi为表面肌电动作试验中某肌肉肌电信号的均方根值;MRMSi为最大主动收缩时某肌肉肌电信号的均方根值;PMVEi为某肌肉的最大主动收缩肌电百分比。
按此方法计算出受试者每个动作中起主要作用肌肉的最大主动收缩肌电百分比。共有20名受试者参与试验,表2仅给出了1~8号受试者上臂侧举动作肱三头肌随角度变化的最大主动收缩肌电百分比的部分数据,角度为表1中的动作范围(0°~180°)的一部分(0°~40°)。

表2 1~8号受试者上臂侧举动作肱三头肌的最大主动收缩肌电百分比
2.2 数据归一化
为了便于比较不同受试者的最大主动收缩肌电百分比,采用归一化法对数据进行处理,归一化之后的数值范围为1~10,具体公式为
(2)

肌张力是维持身体不同姿势和正常运动的基础,肌张力越大,受试者越容易感觉疲劳。在较短时间内,随着肌肉张力的增大,最大主动收缩肌电百分比也会增大[9-10],从试验结果中也可以看出,随着角度变化,最大主动收缩肌电百分比的变化具有一定的规律性。因此肌张力越小,人体的舒适程度越好,肌张力越大,舒适程度越差。由式(2)可知,归一化后的数值越小则舒适程度越好,数值越大则舒适程度越差。
2.3 加权平均处理

(3)

表3 肌肉平均生理横断面积
式中,APCSi为第i块肌肉的生理横断面积;n为动作中起主要作用的肌肉块数量;Cjk,θ为动作变化至θ角度时测得的第k名受试者第j个关节动作的最大主动收缩肌电百分比归一化后的加权值。
通过式(3)可以计算出每个受试者在各角度下的动作舒适度指数。求取20名受试者在各角度下的动作舒适度指数的平均值,对平均值进行四舍五入,得出所有受试者在各个角度下的动作舒适度指数,如表4所示。
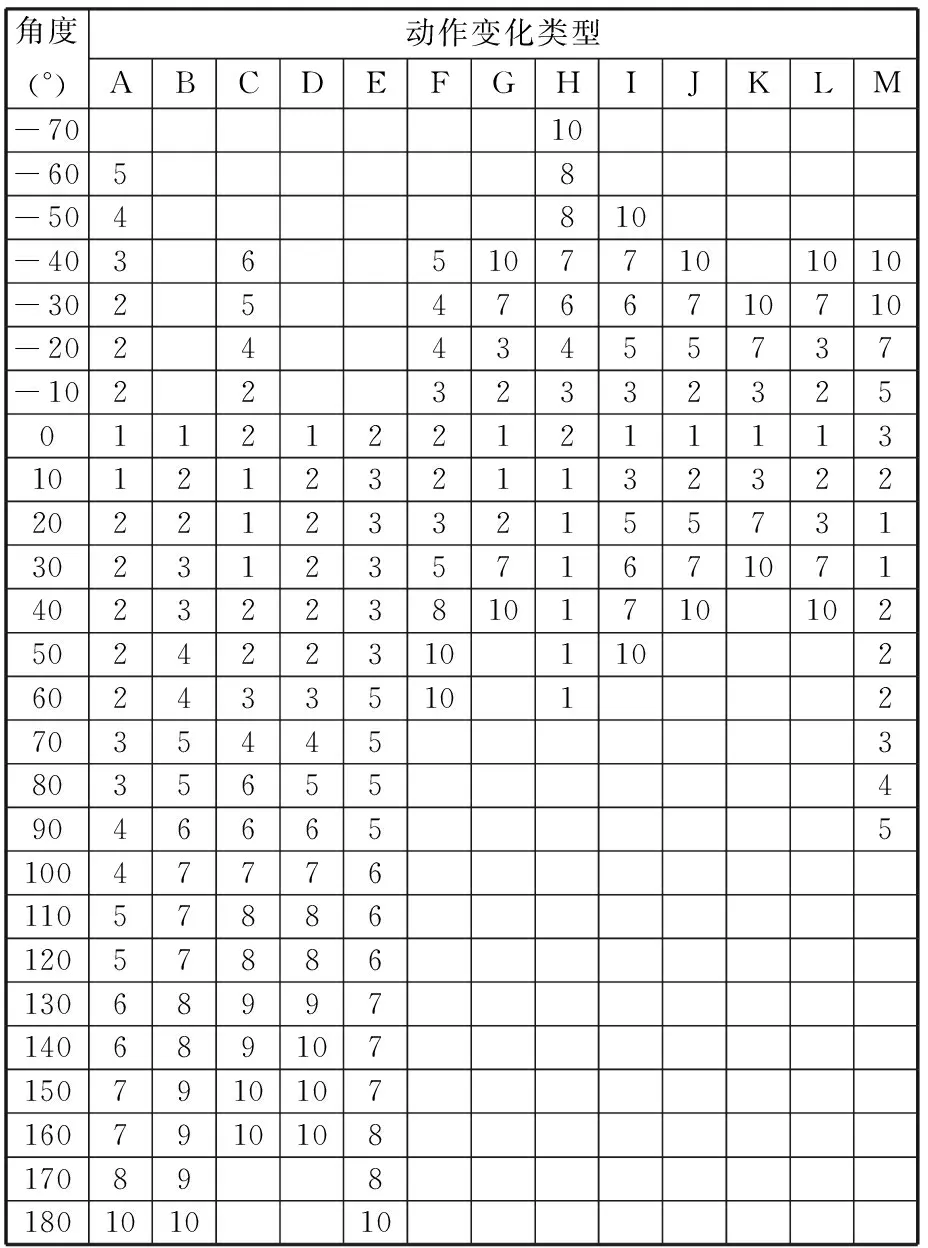
表4 各角度下的动作舒适度指数
注:A.上臂抬升;B.上臂侧举;C.上臂弯曲;D.前臂弯曲;E.前臂旋转;F.手腕弯曲;G.手腕侧屈;H.头部弯曲;I.头部旋转;J.头部侧屈;K.躯干旋转;L.躯干侧屈;M.躯干弯曲
3 基于表面肌电的肌肉舒适度评价准则的建立
3.1 复合动作肌肉舒适度指数的计算
人体上半身的某些动作变化由几块肌肉共同作用,根据表3计算出每个动作变化涉及肌肉的平均生理横断面积作为复合动作肌肉舒适度指数的加权系数,肌肉平均生理横断面积的计算公式如下:
(4)


表5 各动作主要作用肌肉的平均生理横断面积

(5)

3.2 基于表面肌电的肌肉舒适度评价准则
根据各角度下的动作舒适度指数(表4),利用表5各动作主要作用肌肉的平均生理横断面积和式(5),可以计算出复合动作肌肉舒适度指数。根据以往舒适度评价准则总结的规律,考虑人体承受的负荷,在此舒适度指数的基础上,若人体承受的负荷不大于5 kg,则舒适度指数不变;若承受的重量不大于10 kg,则舒适度指数加1;若承受的重量不大于15 kg,则舒适度指数加2。舒适度指数的等级划分以及含义如表6所示。
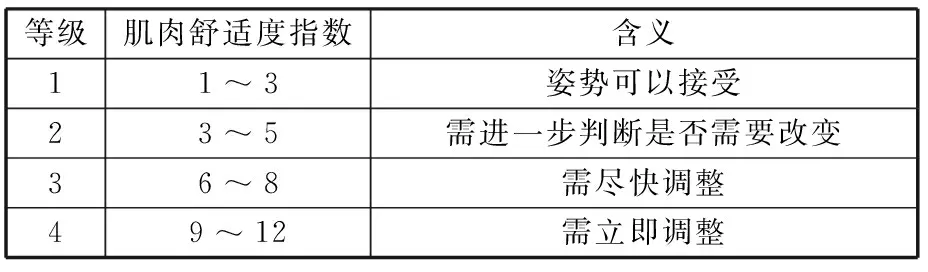
表6 复合动作肌肉舒适度指数的等级划分及含义
4 评价准则的应用及对比
DELMIA人机仿真软件中自带的RULA分析模块已经得到了广泛应用[12-13],利用RULA方法对汽车左前翼子板装配过程中的“气动枪拧紧左翼子板螺柱”的静态作业姿势进行评价,然后与本文得出的评价方法进行对比。利用RULA分析模块对当前状态下的姿势进行评分,具体的评分含义及对应的颜色如表7所示。

表7 RULA等级、评分、颜色以及含义[14]
在DELMIA人机仿真软件Human Task Simulation与DPM模块中建立仿真模型[15],在虚拟环境中建立人体运动模型,根据实际尺寸及位置,导入虚拟人、样车模型和气动枪模型,模拟出实际装配中的作业姿态,对该静态作业姿势进行RULA分析,最终得分为6分,表明姿势需要尽快调整。
为了测得每个关节的角度,在试验中自行设计了与实际车身高度相同的虚拟车身,受试者模拟了“气动枪拧紧左翼子板螺柱”的静态作业姿势,测得左右半身每个动作的角度变化,身体左右两侧前臂弯曲角度分别为θ1(110°)和θ4(60°),上臂抬升角度分别为θ2(50°)和θ5(70°),上臂弯曲角度分别为θ3(40°)和θ6(30°),上臂侧举角度分别为θ7(40°)和θ8(50°),躯干侧屈以及头部侧屈角度分别为θ9(40°)和θ10(40°),其余动作角度为0°,见图3。查表4得出每个动作角度对应的舒适度指数,将各动作主要作用肌肉的平均生理横断面积(表5)代入式(5),计算出左右半身的舒适度指数分别为7,由表6可知该姿势需要尽快调整。
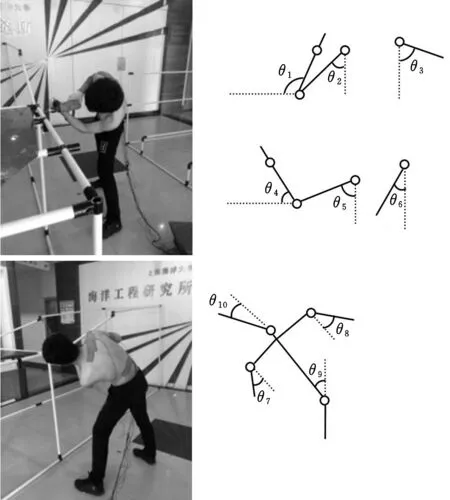
图3 “气动枪拧紧左翼子板螺柱”的静态作业姿势的动作角度Fig.3 Motions degree of static posture of using pneumatic gun tighten bolts of left fender
由RULA方法和本文方法得出的结果对比可以看出,两种评价方法得出的分值有所差异,分别为6和7,但是对应的等级和评分含义是一致的,说明本文肌肉舒适度评价方法是可行的。
5 结论
本文选取人体上半身5个关节进行了动作试验,对每个动作中起主要作用的肌肉块进行表面肌电信号测试,通过对肌电信号进行转换、归一化和加权处理,得出了肌肉舒适度评价指数,据此提出了一套基于表面肌电的肌肉舒适度评价准则,利用RULA评价准则和本文基于表面肌电肌肉舒适度评价准则对汽车左前翼子板装配过程中的“气动枪拧紧左翼子板螺柱”的静态作业姿势进行评价,评价结果显示对应的等级和评分含义是一致的,表明本文评价准则具有可行性。
[1] 张鹏.汽车装配线人机工程与职业性疾病相关性研究[D].广州:华南理工大学,2012.ZHANGPeng.CorrelationStudiesonAssemblyLineofAutomobileMan-machineEngineeringandOccupationDiseases[D].Guangzhou:SouthChinaUniversityofTechnology,2012.
[2] 蔡莉莉.商用车人机工程设计与评价方法的研究[D].长春:吉林大学,2007.CAILili.ResearchonErgonomicsDesginandEvaluationMethodofHeavyCommercialVehicle[D].Changchun:JilinUniversity,2007.
[3] 李珞铭,吴超.人机工程评价研究概况[J].人类工效学,2010,16(2):78-80.LILuoming,WUChao.ResearchSituationofErgonomicsEvaluation[J].ChineseJournalofErgonomics, 2010,16(2):78-80.
[4]KARHUO,KANSIP,KUORINKAI.CorrectingWorkingPosturesinIndustry:aPracticalMethodforAnalysis[J].AppliedErgonomics,1977,4(8):199-201.
[5]McATAMNEYL,CORLETTEN.RULA:aSurveyMethodfortheInvestigationofWork-relatedUpperLimbDisorders[J].AppliedErgonomics,1993,24(2):91-99.
[6]HIGNETTAS,MCATAMNEYL.RapidEntireBodyAssessment(REBA)[J].AppliedErgonomics, 2000,31(1):201-205.
[7]KEEDohyung,KARWOWSKIWaldemar.LUBA:anAssessmentTechniqueforPosturalLoadingontheUpperBodyBasedonJointMotionDiscomfortandMaximumHoldingTime[J].AppliedErgonomics,2001,32(4):357-366.
[8] 李玉章.表面肌电在体育中的应用[M].上海:复旦大学出版社,2015:43-61.LIYuzhang.ApplicationofSurfaceElectromyographyinSports[M].Shanghai:FudanPress,2015:43-61.
[9] 王笃明,王健,葛列众.肌肉疲劳的sEMG时频分析技术及其在工效学中的应用[J].航天医学与医学工程,2003,16(5):387-389.WANGDuming,WANGJian,GELiezhong.sEMGTime-frequencyAnalysisTechniquesforEvaluationofMuscleFatigueandIt’sApplicationinErgonomicStudies[J].SpaceMedicine&MedicalEngineering,2003,16(5):387-389.
[10] 吴剑锋,孙守迁,徐孟,等.面向人机仿真的肌肉力预测模型[J].中国机械工程,2008,19(5):571-574.WUJianfeng,SUNShouqian,XUMeng,etal.AMuscleForcePredictionModelforErgonomicsSimulation[J].ChinaMechanicalEngineering, 2008,19(5):571-574.
[11] 邹锦慧,刘树元.人体解剖学[M].北京:科学出版社,2005:112-130.ZOUJinhui,LIUShuyuan.HumanAnatomy[M].Beijing:SciencePress,2005:112-130.
[12] 陈勇,吴国献,赵忠明.基于CATIA的人员作业仿真建模、人因分析与优化[J].系统仿真学报,2009,21(14):4540-4553.CHENYong,WUGuoxian,ZHAOZhongming.ModelingSimulation,HumanFactorsAnalysisandOptimizationofPersonnelOperatingBasedonCATIAVirtualEnvironment[J].JournalofSystemSimulation, 2009,21(14):4540-4553.
[13] 李付星.基于CATIA软件平台的人机工程应用研究[J].机械设计,2012,29(11):18-21.LIFuxing.Man-machineEngineeringApplicationsResearchBasedonCATIASoftwarePlatform[J].JouralofMachineDesign, 2012,29(11):18-21.
[14]MAGISTRISAD,MICAELLIAA.DynamicControlofDHMforErgonomicAssessments[J].AppliedErgonomics,2013,43(2):170-180.
[15] 盛选禹,盛选军.人机工程模拟教程[M].北京:机械工业出版社,2009:63-92.SHENGXuanyu,SHENGXuanjun.TheSimulationTutorialofErgonomics[M].Beijing:ChinaMachinePress,2009:63-92.
(编辑 苏卫国)
Muscle Degree of Comfort Assessment Rule Based on sEMG
ZHANG Lizhen1SHAO Qi1YANG Jiaqing1YANG Mengmeng1TAO Ningrong1SONG Zheng2DAI Peng2
1.College of Engineering Science & Technology,Shanghai Ocean University,Shanghai,201306 2.Passenger Car Company,Shanghai Automotive Group Co.,Ltd.,Shanghai,201804
In order to avoid poor posture of long time, the five joints of human were selected for the motion experiments. The sEMG experiments were conducted for muscles that played a main role to motion variations. The sEMG signal differences of different subjects were eliminated by maximum voluntary contraction method, and the EMG percentage values were conducted by normalization and weighted average method. According to the physiological cross-sectional area of muscles involved in action variations, the calculation method of composite motion muscle degree of comfort index was given, and the muscle degree of comfort assessment rules were put forward based on the sEMG. Compared with RULA analysis in DELMIA, the analysis results show that the assessment rules are feasible and suitable for the assessment of staff postures.
surface electromyography(sEMG); muscle degree of comfort; assessment rule; experiment; simulation
2016-08-29
国家自然科学基金资助项目(71501125);上海市专业学位研究生实践基地建设项目(2035-14-0001-7);上海市科技创新行动计划资助项目(14111103900);上海市现代农业产业技术体系建设项目(沪农科产字(2014)第5号)
TB18
10.3969/j.issn.1004-132X.2017.06.012
张丽珍,女,1967年生。上海海洋大学工程学院教授。主要研究方向为人因工程。发表论文80余篇。邵 祺,男,1992年生。上海海洋大学工程学院硕士研究生。E-mail:stefanie_sq@163.com。杨加庆,女,1992年生。上海海洋大学工程学院硕士研究生。杨朦朦,男,1988年生。上海海洋大学工程学院硕士研究生。陶宁蓉,女,1983年生。上海海洋大学工程学院讲师。宋 政,男,1977年生。上海汽车集团股份有限公司乘用车公司工业工程科高级经理。戴 鹏,男,1979年生。上海汽车集团股份有限公司乘用车公司工业工程科高级经理。
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
建材发展导向(2022年3期)2022-04-19
中国药学药品知识仓库(2022年1期)2022-03-23
成都信息工程大学学报(2021年4期)2021-11-22
纺织科学研究(2021年9期)2021-10-14
铁道通信信号(2020年1期)2020-09-21
科技传播(2019年24期)2019-06-15
中国美容医学(2018年12期)2018-02-27
浙江工业大学学报(2017年5期)2018-01-22
北京航空航天大学学报(2017年9期)2017-12-18
