通用型线电动涡旋压缩机的结构设计及动态仿真
2017-04-07 09:07:53王立存董光辉王旭东敖文刚
中国机械工程 2017年6期
王立存 董光辉 王旭东 敖文刚
1.国家智能制造服务国际科技合作基地,重庆,4000672.重庆理工大学机械工程学院,重庆,4000543.制造装备机构设计与控制重庆市重点实验室,重庆,400067
通用型线电动涡旋压缩机的结构设计及动态仿真
王立存1,3董光辉2王旭东1,3敖文刚1,3
1.国家智能制造服务国际科技合作基地,重庆,4000672.重庆理工大学机械工程学院,重庆,4000543.制造装备机构设计与控制重庆市重点实验室,重庆,400067
根据通用涡旋型线的特性建立了切向角系数参数化模型;针对电动汽车涡旋压缩机防自转结构的动力特性问题,建立了圆柱销防自转机构的机构模型;基于圆柱销防自转结构的工作原理,从机构学和运动学的角度分析了圆柱销的受力。利用UG软件平台,实现动涡旋盘及电动涡旋压缩机其他零件的三维实体建模,构建虚拟样机模型。通过运动仿真,获得准确的运动学参数曲线,确保圆柱销防自转结构设计的准确性和可靠性。
电动涡旋压缩机;通用涡旋型线;圆柱销防自转结构;动态仿真
0 引言
涡旋理论最早由法国工程师CREUX[1]于1905年以可逆转的涡旋膨胀机为题申请美国专利而提出[1]。一个世纪以来,各国科学家致力于涡旋压缩机结构的研究,目前涡旋压缩机以其效率高、体积小、噪声低、结构简单且运动平稳等特点被公认为是技术最先进的一种新型高效容积式压缩机。
随着全球石油能源的紧缺及环境恶化的加剧,新能源汽车逐渐受到重视和发展,空调系统中的电动涡旋压缩机也得以快速发展。采用永磁无刷直流电机的电动涡旋压缩机与传统的涡旋压缩机相比在结构上体积更小、效率更高、制冷量更大、能耗更低。泛函通用涡旋型线理论的提出,不仅拓展了涡旋型线的研究思路,而且与传统的涡旋型线相比形状性态、性能更优[1]。
防自转结构柱销一端固定在机架上,另一端在动涡旋盘底座环槽孔中,曲轴带动下的动涡旋盘由柱销的反作用力实现防自转功能,比十字滑环防自转结构更简单,比小曲拐和滚珠式防自转结构受力更小,因此本文以UG软件为平台进行虚拟样机的实体建模,探索了电动涡旋压缩机机构运动仿真实现的全过程。
1 基于泛函的通用型线涡旋盘生成
根据Taylor级数思想,三角函数、指数函数、对数函数等任意函数曲线表达式都可以将其展开为切向角参数的级数弧函数形式[2-3]。根据平面曲线弧微分固有方程理论,涡旋型线是由几何共轭型线构成,则涡旋型线的广义泛函方程的集成形式为
(1)
式中,c0,c1,…,cn为性能控制系数;φ为型线切向角参数。
s(φ)即为通用涡旋型线,当k≤3时,涡旋型线为等壁厚涡旋型线;当k>3,cn取不同值时,可得到不同形状的变壁厚涡旋型线。图1为动静盘涡旋型线啮合几何关系示意图,静盘涡旋型线上的点M1与动盘型线上的点M2啮合,相交于一点M;静盘涡旋型线与静坐标系o1x1y1固定相连,动盘涡旋型线与动坐标系o2x2y2固定相连且围绕静坐标系的原点o1做半径为R0的圆周平转运动。图1中,φ为型线切向角参数;M为型线切点;o为型线中心点;Rn为法向分向量模长;Rt为切向分向量模长;Ro为曲轴偏心距。

图1 共轭啮合涡旋型线及型线法向切向的分解Fig.1 Conjugate meshing scroll profile and the normal tangential decomposition
文献[4-5]推导得到动静盘涡旋型线的向量表征形式为
(2)
将式(1)代入式(2)可得动静涡旋盘基于切向角参数的向量表征形式为
(3)
与笛卡儿坐标系下涡旋型线的求解相比省去了求积分的复杂运算。
在MATLAB软件中,基于非劣排序的多目标遗传算法对多目标函数的通用型线进行优化得到Pareto非劣解[6],此时通用涡旋型线方程为
s(φ)=0.1021φ+0.7939φ2
(4)
基于MATLAB中的GUI工具包对通用涡旋型线进行参数化建模设计,依据等距原理实现涡旋盘型线的生成[7-8],涡旋盘型线如图2所示。
(a)涡旋壁型线
(b)涡旋盘型线图2 通用涡旋盘型线生成Fig.2 General profiles of the scroll plate
2 圆柱销防自转结构模型和工作原理
图3为圆柱销防自转结构装配后的剖视图,涡旋压缩机主要结构包括动静涡旋盘、防自转结构以及偏心轴等构件。圆柱销防自转结构主要由定位销和圆环槽组成,圆柱定位销均匀地分布在机架上,环槽则以一定的偏移距离均匀地分布在动涡旋盘的背面。
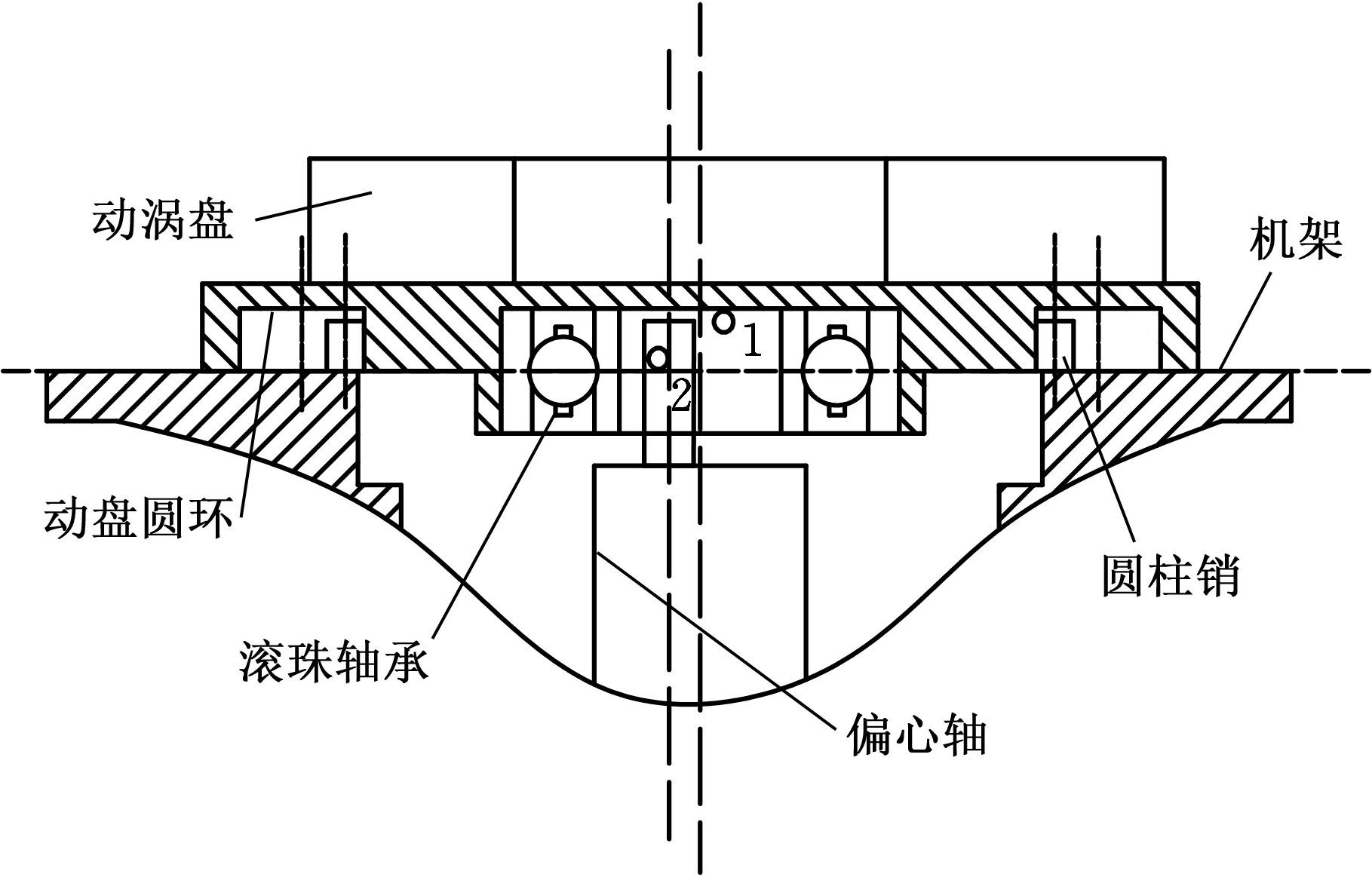
图3 圆柱销防自转结构装配剖视图Fig.3 Sectional view of anti-rotation structure of cylindrical pin
根据机构学和圆柱销受力,选择圆柱销的数目为6且均匀分布在机架的圆周上,图4为动涡旋盘与机架上圆柱销的平面位置关系图。o1为偏心曲轴轴心,o2为机架上所有圆柱销中心圆的圆心,同时也是动涡旋盘底座上所有环槽中心圆的圆心,o1o2为曲轴偏心距。a~f是机架上6个圆柱销的中心点,A~F是动涡旋盘上6个环槽的中心点。偏心主轴旋转时带动动涡旋盘底端环槽绕机架上的圆柱销做圆周运动。
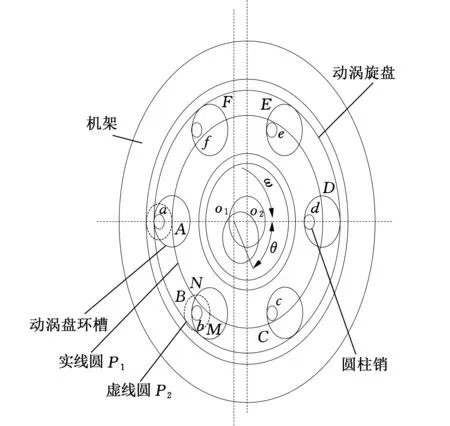

图4 圆柱销与动涡旋盘的平面装配图Fig.4 Planar assembly of cylindrical pin and movable scroll
防自转圆柱销固定在支架上,当偏心轴在电机带动下旋转时,分布在动涡旋盘底部的圆环中心绕圆柱销做圆周运动,根据相对运动原理,此时将圆柱销作为运动的对象则分析圆柱销防自转结构的原理更加清晰。如图4所示,曲柄、圆柱销和环槽之间满足如下关系式:
Ror=R′-r
(5)
式中,Ror为曲轴偏心距;R′为动涡旋盘底座环槽半径;r为机架圆柱销半径。
以A和B两处为例对圆柱销和环槽进行分析。动涡旋盘低端圆环中心相对于圆柱销中心所处的位置将受到下面3个条件的限制:①环槽中心始终围绕着以圆柱销中心a、b两点,半径Ror的圆做运动,如图中虚线圆所示。②因为动涡旋盘为刚体,圆环槽中心相对于曲柄销中心的距离保持不变,因此圆孔的中心始终在以曲柄中心o2为圆心、曲柄中心到圆孔中心之间的距离为半径的圆上,而这个圆的半径即是曲柄销中心到圆孔中心的距离o2A。此时对于B点处的孔与圆柱销,实线圆P1与虚线圆P2相交于M、N两点,因此圆环槽B的中心位置必定在曲线MN上。对于A处圆柱销和环槽,曲柄销此时转过的角度θ=0°时,这个圆刚好与环槽中心轨迹圆相切,所以此处的环槽中心只能在点A处。③A处和B处环槽在动涡旋盘上的相对位置保持不变,按已知条件,二者中心与曲轴中心连线的夹角为π/3,故点B和点M重合。根据机构学建立的机构模型如图4所示,连杆o1o2表示与电机相连的偏心轴,偏心轴在电机的带动下做圆周运动,从而带动动涡旋盘,用连杆o2B表示动涡旋盘,连杆o1b表示机架。因此可知四边形o1o2Bb为平行四边形,曲轴转过任意角度时,连杆o2B的运动始终保持与初始位置下的状态相平行,构成等边三角形。可见动涡旋盘必然相对于静涡旋盘平动(即公转)而不能自转。因此圆柱销防自转结构是根据平行四边形原理来工作的。
机架与动涡旋盘装配后,圆柱销与动涡旋盘环槽内的圆环相接触,根据式(5)可知,圆柱销中心与环槽中心始终保持一定的位置关系,因此在涡旋压缩机工作过程中,动涡旋盘对圆柱销的作用力Fi均匀地分布在接触面上,圆柱销受力如图5所示。
动涡旋盘对圆柱销的作用力为
(6)
式中,MZ为动涡旋盘的自转力矩;n为圆柱销个数。
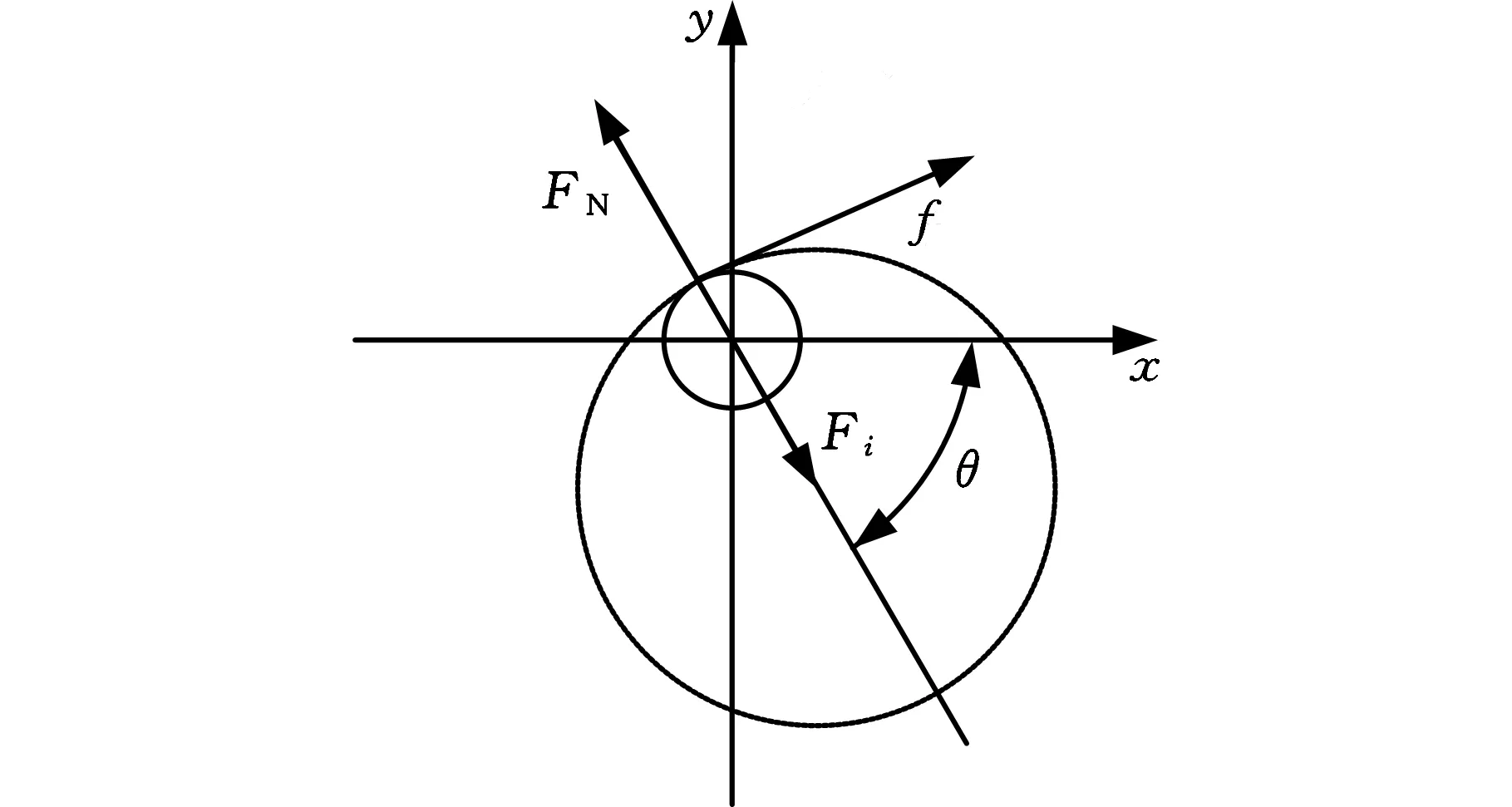
图5 圆柱销受力分析 Fig.5 Analysis of the force of cylindrical
3 电动涡旋压缩机的运动仿真
3.1 零件三维模型的建立与装配
将MATLAB中生成的涡旋盘型线程序点保存为DAT格式。利用三维软件UG中样条功能,通过点生成曲线的方法实现动涡旋型线的转换。本文采用6个圆柱销的防自转结构,因此在UG环境下采用拉伸、旋转、切除命令,得到通用型线动涡旋盘的三维模型,如图6所示。
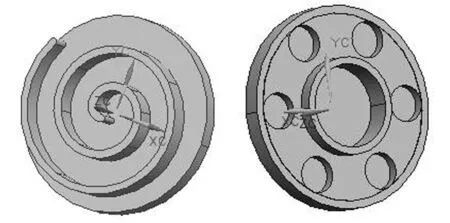
图6 动涡盘的通用涡旋型线及三维模型Fig.6 General profile and three-dimensional model of scroll
再根据电动涡旋压缩机各零件的尺寸关系,对组成涡旋压缩机的其他零件建立三维模型。在UG装配环境下,根据表1中各部件间的约束关系进行虚拟装配。
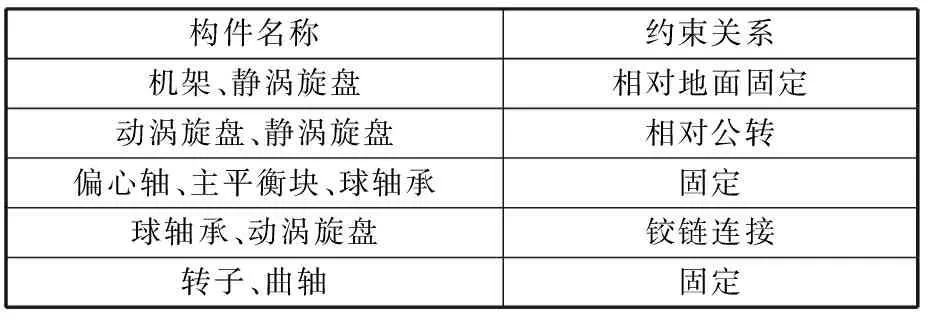
表1 各运动构建之间的约束关系
按照约束关系得出电动涡旋压缩机的位置关系(图7)和装配图(图8)。
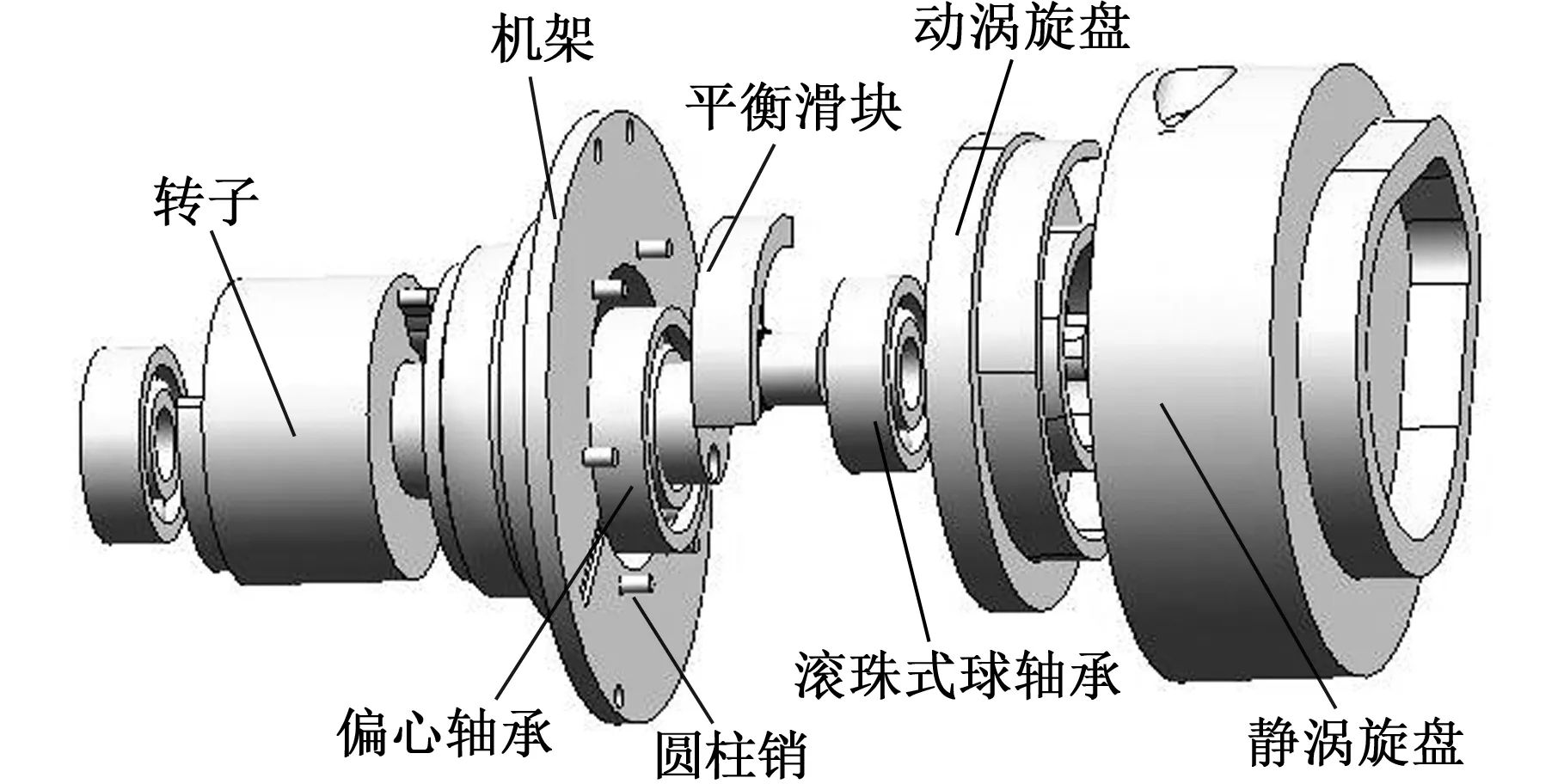
图7 各构件之间的连接关系Fig.7 The connection between the various components

图8 电动涡旋压缩机的装配图Fig.8 Assembly drawings of the electric scroll compressors
3.2 运动仿真结果分析
将装配好的电动涡旋压缩机模型导入运动仿真模块,新建运动仿真文件,将机构中的元件定义为连杆,其中机架设定为固定连杆,按照表1中各构件之间的约束关系,定义各杆件之间的运动副关系,使用运动副将各杆件连接在一起构成运动机构,其中主轴与平衡滑块为铰链连接,用以实现动涡旋盘的转动。
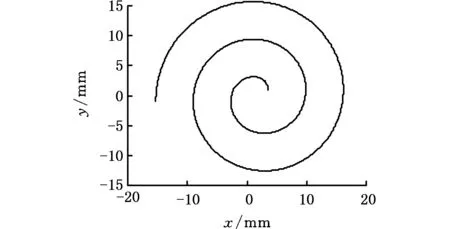
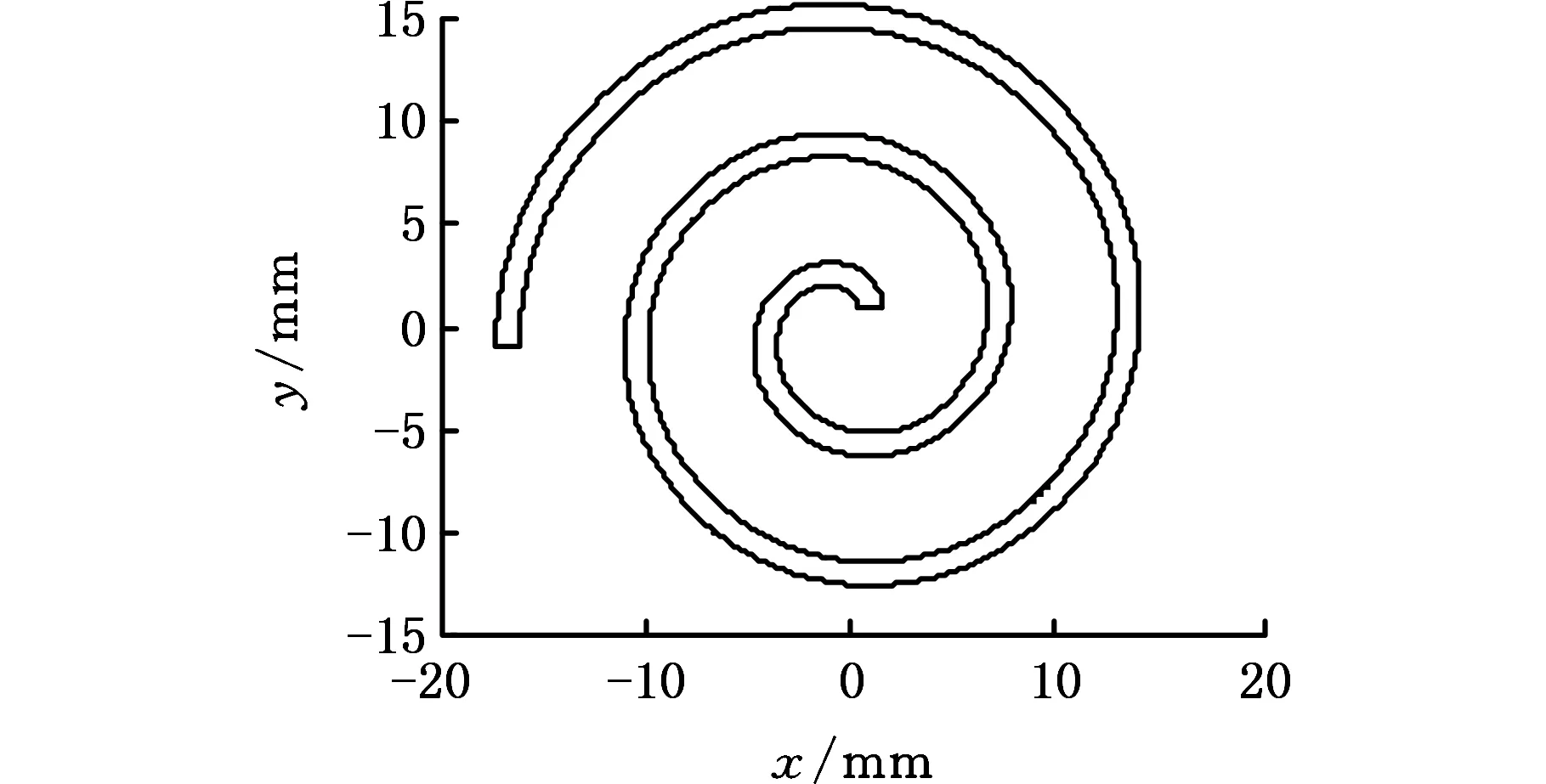
在定义完运动副之后,需要在机构中添加驱动以促使机构运转。将驱动添加在曲轴的转子上,设置为恒定的转速2900 r/min[9]。由涡旋压缩机的运动原理可知,在主轴的带动下,动涡旋盘绕静涡旋盘做公转平动。图9为动涡旋盘某一圆环槽的中心轨迹及其相对于静止机架的速度的变化规律示意图。

(a)质心轨迹

(b)速度变化曲线图9 动涡旋盘质心轨迹和速度示意图Fig.9 Motion trajectories and velocity schematic
动涡旋盘底座环槽中心点的轨迹能够准确地反映圆柱销防自转结构的特性。电动涡旋压缩机工作不正常时动涡旋盘切向气体力对圆柱销的作用力分布不均匀,可能导致圆柱销断裂,同时动涡旋盘在一定角度内出现自转现象,因此分析动涡旋盘底座圆孔中心的运动情况尤为重要,曲轴带动下的动涡旋盘圆孔中心绕定位销中心做圆周运动,其运动轨迹方程为
(7)
通过运动仿真获得圆孔中心相对于圆柱销水平方向上的位移变化,如图10所示。
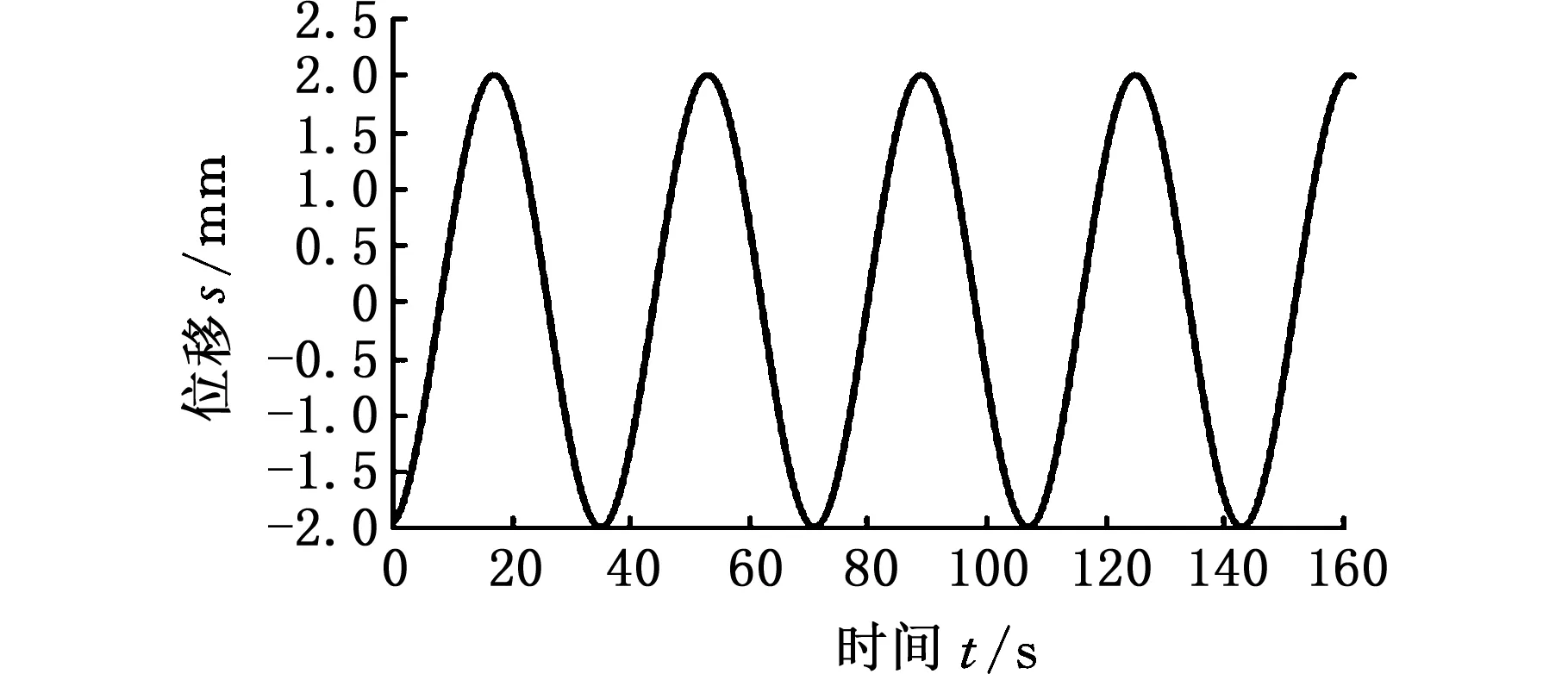
图10 圆孔中心位移示意图Fig.10 Schematic of the Circularhole center displacement
由图9b和图10可知,每当圆孔中心位移s为零时,动涡旋盘的速度v达到最大,而此位置的圆柱销与动涡旋盘几乎分离,柱销与圆孔接触面受力最小;圆孔中心旋转1/4周后,圆孔中心相对位移最大,动涡旋盘的速度为零,此位置处的圆柱销与动涡旋盘圆孔内壁接触面之间的作用力最大。由此可知,在主轴的带动下,动涡旋盘圆孔绕圆柱销中心做圆周运动,且动涡旋盘圆孔中心运动轨迹与圆柱销尺寸和偏心距之间必须满足式(5)。
然而,在实际电动涡旋压缩机工作过程中,由于各零件的加工误差及装配精度的影响,圆孔与圆柱销之间总存在一个偏差ΔL,此时将一个表面光滑的圆环(图11)置于动涡旋盘环槽内来补偿它们之间的空隙。

图11 圆环结构Fig.11 Ring structure
圆环有两方面的作用:一方面将圆柱销与动涡旋盘之间的摩擦转换为圆柱销与圆环之间的摩擦,降低动涡旋盘的摩擦力,而且加工过程中对圆环的加工精度控制要比对动涡旋盘的加工精度控制要容易,易于更换;另一方面,圆环使得动涡旋盘与机架之间的装配更加紧凑,提高了圆柱销防自转结构对动涡旋盘的防自转作用。
4 结论
(1)根据通用涡旋型线的特性,基于切向角参数表达的泛函方程及共轭啮合理论,推导出动静盘涡旋型线方程的向量表征形式,在MATLAB软件GUI工具包下实现向量几何点涡旋型线的拟合。
(2)从机构运动学角度分析得出圆柱销防自转结构是依据平行四边形原理工作的,给出了涡旋压缩机工作过程中动涡盘圆孔、曲轴和圆柱销之间的位置关系。
(3)利用UG软件对电动涡旋压缩机进行了虚拟设计,包括零部件的三维建模、虚拟装配、运动仿真,用获得的仿真数据来验证圆柱销防自转结构的可靠性。针对现实中存在的问题提出了合理的改进措施,为电动涡旋压缩机的进一步发展提供了基础。
[1]CREUX.RotaryEngine:US,801,182[P].1905-01-05.
[2] 王立存,陈进.涡旋压缩机几何理论及耦合机理研究[J].中国机械工程,2006,17(5):524-528.WANGLicun,CHENJin.GeometryTheoryandCouplingMechanismofScrollCompressor[J].ChinaMechanicalEngineering,2006,17(5):524-528.
[3]ZHAOYuanyang,LILiansheng,YANGQichao,etal.ResearchonHeatandForceDeformationsofLarageDeliveryScrollAirCompressor[C]//Proceedingsofthe5thInternationalConferenceonCompressorandRerigeration.Xi’an:Xi’anJiaotongUniversityPress,2005:249-255.
[4] 张永栋.基于多目标遗传算法的涡旋型线形状优化[J].机械工程学报,2005,41(1):172-175.ZHANGYongdong.ProfileOptimizationofScrollsBasedonMultiobjectiveGeneticAlgorithms[J].ChinaMechanicalEngineering, 2005,41(1):172-175.
[5] 刘涛,邬再新,刘振全.法向等距线法生成涡旋压缩机型线的研究[J].机械工程学报,2004,40(6):55-58.LIUTao,WUZaixin,LIUZhenquan.StudyonGeneratingProfilewithNomal-equidistant-curveMethodforScrollCompressor[J].ChineseJournalofMechanicalEngineering,2004,40(6):55-58.
[6] 王立存,董光辉,张国进,等.基于MATLAB、UG的泛函通用型线涡旋盘有限元建模及分析[J].流体机械,2016,44(2):29-33.WANGLicun,DONGGuanghui,ZHANGGuojin.FiniteElementModelingandAnalysisofGeneralProfilesScrollCompressorPlateBasedonMATLABandUG[J].FluidMachinery,2016,44(2):29-33.
[7] 白亮亮,唐良宝.基于ADAMS活塞压缩机动平衡虚拟设计[J].流体机械,2008,36(6):43-45.BAILiangliang,TANGLiangbao.VirtualDesignforEquilibriumofPistonCompressorBasedonADAMS[J].FluidMachinery,2008,36(6):43-45.
[8] 王立存,陈进,李世六,等. 基于泛函的涡旋型线共轭啮合研究[J].机械工程学报,2007,43(3):50-53.WANGLicun,CHENJin,LIShiliu.ConjugateMeshingTheoryofScrollProfilesBasedonFunctionalExpression[J].ChineseJournalofMechanicalEngineering, 2007,43(3):50-53.
[9] 程哲铭,欧阳新萍,雷蓉.涡旋式压缩机涡旋型线的研究综述与前景[J].流体机械,2015,43(1):51-56.
CHENGZheming,OUYANGXinping,LEIRong.OverviewandProspectoftheResearchonProfileofScrollCompressor[J].FluidMachinery,2015,43(1):51-56.
(编辑 苏卫国)
Structural Design and Dynamic Simulation of a General Profile Electric Scroll Compressor
WANG Licun1,3DONG Guanghui2WANG Xudong1,3AO Wengang1,3
1.National Research Base of Intelligent Manufacturing Service,Chongqing,400067 2.College of Mechanical Engineering, Chongqing University of Technology,Chongqing,400054 3.Chongqing Key Lab of Manufacturing Equipment Mechanism Design and Control, Chongqing,400067
A parametric model of tangential coefficient was built based on characteristics of general scroll profiles. To study the dynamics characteristics of the scroll compressors for electric vehicles, a model of anti-rotation mechanism of cylindrical pin anti-rotation structure was established. On the basis of operational principles of anti-rotation mechanism of cylindrical pin, the forces acted on the cylindrical pins were analyzed with kinematics and the mechanisms. UG was used to design three-dimensional models of the scroll plate and other parts, and a virtual prototype model was established. By the kinematics simulation of the scroll compressor the accurate curves of kinematics parameters were obtained. It may ensure the accuracy and reliability of the cylindrical pin anti-rotation structurs.
electric scroll compressor; general scroll profile; cylindrical pin anti-rotation structure; dynamic simulation
2016-04-28
国家自然科学基金资助项目(51375515);重庆市前沿与应用基础研究项目(cstc2015jcyjA60004);制造装备机构设计与控制重庆市重点实验室开放基金资助项目(1456034)
TH45DOI:10.3969/j.issn.1004-132X.2017.06.015
王立存,男,1978年生。重庆工商大学国家智能制造服务国际科技合作基地教授、博士。主要研究方向为涡旋压缩机设计理论、电动汽车涡旋压缩机关键技术和机械系统多学科协同优化技术。董光辉(通信作者),男,1990年生。重庆理工大学机械工程学院硕士研究生。E-mail: 511158235@qq.com。王旭东,男,1981年生。重庆工商大学国家智能制造服务国际科技合作基地副教授、博士。敖文刚,男,1976年生。重庆工商大学国家智能制造服务国际科技合作基地副教授。
猜你喜欢
汽车零部件(2022年9期)2022-09-30 00:54:20
中国临床医学影像杂志(2022年6期)2022-07-26 07:17:04
制冷技术(2021年1期)2021-03-31 09:02:34
经济技术协作信息(2020年30期)2020-10-28 08:56:12
机械制造(2020年8期)2020-09-30 06:32:24
电线电缆(2018年3期)2018-06-29 07:41:00
制造技术与机床(2015年10期)2015-04-09 07:06:04
温州职业技术学院学报(2014年2期)2014-03-11 19:03:26
机械工程师(2013年1期)2013-03-25 06:34:28
船海工程(2013年6期)2013-03-11 18:57:29