动态视觉监控系统人流量检测
2017-03-31 08:52:54贾其臣曹开发谢慕君
长春工业大学学报 2017年1期
贾其臣, 张 琦, 曹开发, 谢慕君
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
动态视觉监控系统人流量检测
贾其臣, 张 琦, 曹开发, 谢慕君*
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
运用混合高斯模型对背景进行建模,然后实时更新背景,检测出运动目标,采用改进卡尔曼滤波对目标位置进行预测,并与目标实际位置进行参数匹配,如果二者距离不大于阀值,则认为二者为同一目标,否则为二个不同目标。视频图像的人数统计实验验证了检测方法的有效性。
人流量检测; 混合高斯模型; 卡尔曼滤波; 目标计数
0 引 言
近年来,随着计算机视觉技术的发展,人流量检测已成为各大科研单位的研究热点。Malinovskiy Y[1]等提出从连续的图像序列中判别出运动行人,然后进行快速的计数,达到人流量监测的目的。而在目标识别和跟踪中,建立背景模型起关键作用。背景差分法[2]、帧间差分法[3]、光流法[4]这3种是当前使用最多的背景提取算法,但它们各有优点与缺点。孙洋[5]提出采用高斯背景建模和边缘检测技术,通过提取目标运动的区域以及其边缘信息形成目标区域,同时把头部和肩部组合起来形成一形态,构建行人检测模板,然后采用该行人检测模板对检测区域进行匹配,统计行人,达到人流量监测效果。姚金良[6]等提出虚拟门,通过统计其前景像素个数进行人流量统计,该方法包括:学习过程与计数过程。学习过程:采用行人检测的方法提取场景中的行人模型,然后用线性把行人模型拟合为虚拟门上的点并赋予权重。在计数过程,该方法考虑虚拟门上前景像素的权重、运动矢量和方向等信息,逐帧统计虚拟门上的前景像素点数,在特定时间内积累的前景点数来统计通过虚拟门的人数。Garcia J[7]等通过检测人体头部,跟踪头部得到头部候选区的运动轨迹,根据轨迹的方向更新来计数,该方法在室内具有良好的行人检测效果。
文中针对室外进行人流量计数。运用混合高斯背景建模与卡尔曼迭代跟踪进行人流量监测。
1 行人检测
采用混合高斯模型[8]对目标背景进行提取,由多个高斯模型分布的集合表示每个像素值。其样本通过以下获得:
(1)
式中:Xt----第t帧图像的像素值;
(x0,y0)----像素的位置;
I(x0,y0,i)----第i时刻在位置(x0,y0)的像素值。
Xt的高斯混合分布概率密度函数:
(2)
式中:K----混合高斯模型的个数;
ωk,t----t时刻第k个高斯分布的权值;


图像的每个像素点的特征用5个高斯模型表示。高斯混合模型包括3个处理过程。
1.1 参数初始化

(3)
(4)
1.2 模型参数更新
当得到新的图像时,用新图像上的每一个像素与该像素的高斯混合模型中的K个高斯分布分别进行两两匹配,如果该新的像素Xt和该高斯分布中的某一个满足式(5),则认可该像素Xt与其高斯分布满足匹配条件。
(5)
式中:μi,t-1----第i个高斯的分布第t-1时刻的均值;
δi,t-1----第i个高斯的分布第t-1时刻的标准差。
能与Xt相匹配的每一个高斯分布,其参数按下式进行更新:
(6)
式中:α----用户定义的学习率;
ρ----参数学习速率。
如果该像素Xt与任一个高斯分布都不能两两匹配,则可认为出现新的高斯分布,则权重最小的高斯分布将被新的高斯分布替换。新的高斯分布的均值为μi,t,初始化一个较大的标准差σ0和一个较小的权重ω0。
1.3 目标检测
高斯分布中参数完成更新后,按照ωi,t/σi的比值由大到小对所存高斯分布进行排序,最能代表背景的高斯分布排在序列的前面,按下式取前L个高斯分布为背景,这样行人目标就检测出来了。
(7)
视频图像处理过程如下:
1)对视频中的每帧图像一一做去噪等预处理。
2)根据提取视频的前40帧图像,用高斯混合模型进行背景训练。第40帧之后的视频图像需要更新其背景模型和参数,并且利用该模型提取前景的目标后,进行开、闭运算等形态学方法,检测到的前景目标是二值化图像。文中以第一段视频第275帧为例,原图像及二值化效果分别如图1和图2所示。

图1 原图像
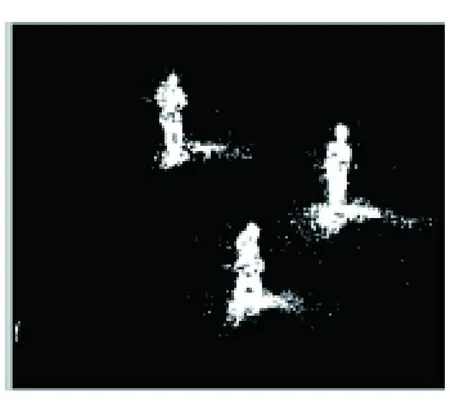
图2 二值化图像
3)对步骤2)提取的二值化图像进行中值滤波,消除了目标周围的噪声点和图像边缘的毛刺,效果如图3所示。

图3 滤波后二值图像
4)检测出的目标包括非行人目标与行人目标,此时需要根据面积大小进行判断域,文中面积大于40认定是行人。
2 目标跟踪计数
2.1 卡尔曼滤波
目标跟踪[9-10]常用的方法是首先得到目标的特征向量集,然后依靠特征集去寻找与其相应匹配的目标。文中提取行人的前景目标图像之后,对行人目标跟踪,采用区域的方法,将包含行人目标的团块作为跟踪区域[11],将该区域外界矩形的重心作为跟踪特征。为提高跟踪效率和跟踪精度,文中引入了卡尔曼滤波算法对行人重心进行跟踪估计。
卡尔曼滤波器(Kalman Filtering)[12]是一种通过建立线性系统状态方程,计算系统的输入输出数据,对系统的状态做最优化估计算法。该算法利用当前时刻的状态对下一时刻的状态做最优状态预估计,卡尔曼滤波器具有良好的实时性,并且计算量较小的特点。其预测方程如下:
(8)


A----状态转移矩阵;
B----噪声输入矩阵;
U(t)----随机噪声序列。

2.2 改进的行人跟踪算法
为了对行人进行有效跟踪,文中为每个目标设计了一个跟踪器,对跟踪器进行实时更新计数,假如A代表已经被跟踪的目标,B代表检测出的目标,d为用卡尔曼滤波预测出的型心与检测出的目标型心之间的距离。由于行人在前后二帧之间的移动距离不大,故可设定一阀值,当移动距离小于此阀值时,可以认定此距离对应的被检测的A目标和被跟踪的B目标为同一目标,故为此目标分配跟踪器进行跟踪计数,文中将阀值设定为30。在开始匹配时,先求出所在的d值,将其加入跟踪器,然后找到其中小于d,若d<30,则判断Tp和Dq为同一目标,令Tp=Dq+30,继续找出跟踪列表中的最小值,重复以上判断过程,直到所有d的值全部大于30,则此次匹配结束,对目标进行标号计数,如图4所示。

图4 跟踪计数图
3 行人目标跟踪实验
根据上述原理,绘制视频人数统计流程如图5所示。
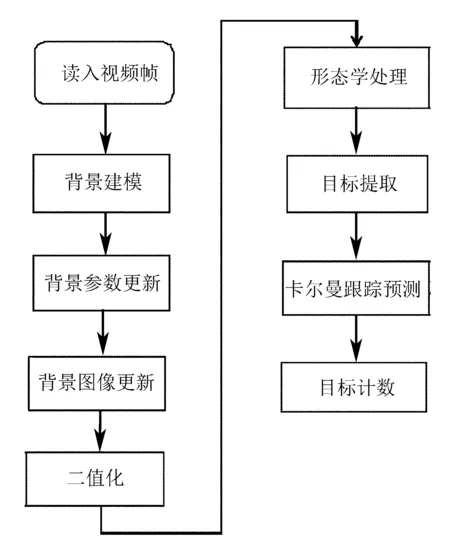
图5 行人统计算法流程图
在PC机(Intel i5-410U 1.70 GHz 4G内存) MATLAB2014a上运行,视频图像为320×240,在同一场景拍摄了6个AVI视频片段进行行人流量检测实验,每段视频时长1 min左右。采用图5的流程图步骤,实验结果见表1。
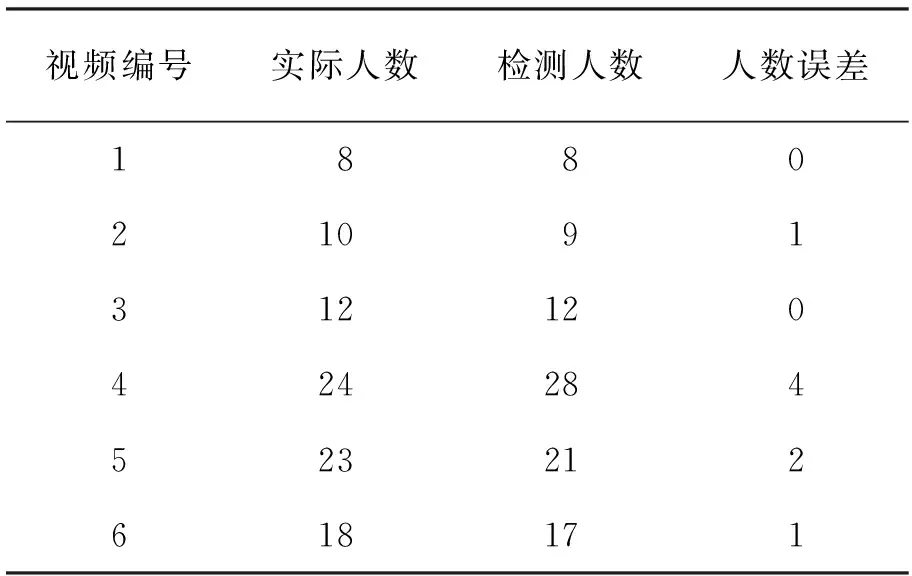
表1 行人人数统计结果
实验结果表明,上述算法可以实现动态监控视频的人数统计。对单个行人或无遮挡的多个行人可以达到很好的计数效果。但是由于行人运动的无序性,在检测区域停留引起目标消失,人体相互遮掩以及光照产生的阴影干扰,对行人统计有一定的误差。
4 结 语
采用混合高斯针对行人进行背景建模提取运动目标,然后通过改进卡尔曼跟踪的方法,实现对单个行人或多个行人目标的有效跟踪计数,实验证实,文中设计的行人流量跟踪统计方法可行有效。但是行人相互之间的遮挡,光照突变引起对背景干扰没有得到很好的解决,造成计数有误差,这一问题还需要进一步的科学实验研究解决。
[1] Malinovskiy Y, Zheng J Y, Wang Y H. A simple and model-free algorithm for real-time pedestrian detection and tracking[C]// The 86th Annual Meeting of the Transportation Rescarch Board, Washington,D. C:[s.n.] ,2007.
[2] Haritaoglu, Harwood D, Davis L S G. A human body part labeling system using sihouettes[C]// Fourteenth International Conference on Pattern Recognition,1998:77-82.
[3] Hong Bingrong, He Huaiqing. Research of waling and running locomotion control methods for virtual humans[J]. Chinese High Technology Letters,2001(3):91-95.
[4] Meyer D, Denzler J, Niemann H. Model based extraction of articulated objects in image sequences for gait analysis[C]// Proc IEEE International Conference on Image Processing, Santa Barbara,California,1997:78-81.
[5] 孙洋.视频中行人快速检测计数方法研究[J].数字技术与应用,2013(11):84-85.
[6] 姚金良,钱翰博,汪澄.视觉自适应行人计数[J].光电工程,2012(7):102-108.
[7] Garcia J, Gardel A, Bravo I, et al. Directional people counter based on heads tracking[J]. IEEE Computer Socity Press,2012,120:470-475.
[8] Stauffer C, Grmson W E L. Adaptive background mixture models for real-time tracking[C]// Proceeding of IEEE International Conference on Computer Vision and Pattern Recognition, Fort Colins, Colorado, USA: iEEE Computer Society,1999(2):246-252.
[9] Lee Munwai, Cohen I, Soon Kijung. Particle filter with analytical inference for hunman body tracking[C]//Proceeding of IEEE Workshop on Motion & Gmputing,2002:159-165.
[10] Collins R T. Mean-shift blob tracking through scale space[C]// Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recongnition, Madison, WI, USA:[s.n.],2003:234-240.
[11] 王唯合,王宏志,赵兰英.运动目标检测跟踪方法研究[J].长春工业大学学报:自然科学版,2007,28(4):411-414.
[12] 胡学刚,刘忠振.基于高斯模型和卡尔曼预测的检测与跟踪[J].计算机工程与设计,2013,34(1):247-251.
Dynamic visual pedestrians flow measurement system
JIA Qichen, ZHANG Qi, CAO Kaifa, XIE Mujun*
(School of Electrical & Electronic Engineering, Changchun University of Technology, Changchun 130012, China)
Mixed Gaussian model is applied to build and update the background to detect the moving targets. With improved Kalman filter, target positions are estimated and then matched with the real position parameters. If the distance between the estimated and real is less than the threshold, we can conclude that the two positions are thesame object otherwise they are different. Statistic experiments of pedestrian flow based on video images verified the method.
traffic detection; Gaussian mixture model; Kalman filter; target counting.
10.15923/j.cnki.cn22-1382/t.2017.1.15
2016-11-17
吉林省科技厅基金资助项目(2015-25)
贾其臣(1989-),男,汉族,河南商丘人,长春工业大学硕士研究生,主要从事图像处理方向研究,E-mail:fendouxiaozi2015@sina.com. *通讯作者:谢慕君(1969-),女,汉族,吉林长春人,长春工业大学教授,博士,主要从事智能机械方向研究,E-mail:xmj666@163.com.
TP 391
A
1674-1374(2017)01-0079-05
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
数字通信世界(2021年3期)2021-04-09 02:05:00
湖北理工学院学报(2020年4期)2020-08-22 06:43:26
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
文理导航(2018年9期)2018-08-16 17:38:46
现代经济信息(2016年34期)2017-08-12 10:06:13
计算机应用与软件(2017年4期)2017-04-24 10:39:07
大众投资指南(2015年7期)2015-05-30 10:48:04
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
现代商贸工业(2014年15期)2014-08-16 03:15:26