中继卫星支持海量航天器在轨测控技术
2017-03-30 12:08:45单长胜李于衡孙海忠
中国空间科学技术 2017年1期
单长胜,李于衡,*,孙海忠
1.北京空间信息中继传输技术研究中心,北京 100094 2.中国卫星发射测控系统部,北京 100120
中继卫星支持海量航天器在轨测控技术
单长胜1,李于衡1,*,孙海忠2
1.北京空间信息中继传输技术研究中心,北京 100094 2.中国卫星发射测控系统部,北京 100120
目前中低轨的卫星在轨测控主要基于地面测控设备,当管理的在轨卫星数量持续增加时,需要不断地建设新的测控站或增加测控设备,同时由于地球遮挡限制,一个地面测控站的测控范围只占一颗卫星运行弧段的很小部分,集中在国内建设的地面测控站无法解决轨道全弧段覆盖难题。地球静止中继卫星系统的高覆盖特性和多址服务能力为近地卫星在轨测控提供了空间和频域的多重复用能力,文章从中继链路性能、多目标服务项目、多目标服务能力、覆盖特性等方面进行了详细分析,结果表明在现有的管理模式下,3颗具有多址能力的中继卫星就能管理中国目前在轨的和今后一段时间发射的所有近地卫星,这将显著降低在轨卫星对地面测控设备的需求。同时,中继多址测控服务模式可以克服现有在轨卫星管理时间域集中和应急能力差的缺陷,为卫星用户提供更多的服务手段,满足不同在轨卫星管理和使用要求,大幅提升在轨卫星的安全性和使用效率。
中继卫星;SMA多址技术;近地卫星;卫星在轨测控;前向链路;返向链路
地球静止轨道均匀分布3颗中继卫星可以彻底克服地球的遮挡,实现对中、低轨卫星和地面目标的100%覆盖。美国在执行阿波罗登月任务时,建设的分布全球20多个地面站在最有利条件下也只能覆盖30%以下的地球轨道,因此20世纪80年代中继卫星系统(Tracking and Data Relay Satellite System,TDRSS)建成后,美国撤消了在全球布设的14个地面测控站,中继卫星(Tracking and Data Relay satellite,TDRS)的服务范围从航天飞机扩大到中低轨航天器、运载火箭和机载平台等1-2]。据统计,2011年10月1日到2012年9月30日,TDRSS为近地卫星提供了147 810圈次、176 141 h的服务(平均每天405圈、每圈72min),系统的服务效率达到了99%以上3]。欧洲航天局也重视发展中继卫星为飞船和对地观测卫星提供数据中继服务,欧洲第二代中继卫星(European Data Relay Satellite,EDRS)为“哨兵”观测卫星提供50%以上的业务数据传输,同时还为“伽利略”卫星等提供测控服务4]。
随着中国航天事业的蓬勃发展和技术进步,新发射卫星数量明显增加、卫星在轨寿命也随之延长,因此需要管理的在轨卫星数量将显著增加,采用目前以地基为主的近地卫星测控模式只能通过大幅增加测控设备完成在轨管理任务,而且在主要依靠国内测控站的条件下,即使建设了大量地面测控站,仍然无法弥补卫星升、降轨之间运行到国外不可见的测控间隙,日常卫星在轨测控只能继续采用时间域集中的测控模式,卫星平台应急的安全需求和有效载荷控制快速响应的效率需求无法得到满足5-6]。
中继卫星对中、低轨道卫星具有高覆盖特性,可以工作在单址和多址工作方式,在多址工作模式下,一颗中继卫星可以同时为多个用户目标服务。中国一代中继卫星系统已经在载人飞船的长弧段测控任务中发挥了关键作用7],第二代中继卫星将具备多址工作模式,这种多目标服务能力和高覆盖特性的结合,就有可能利用少数几颗中继卫星对大量的在轨近地卫星实施测控管理。为此,从中继卫星对近地卫星的覆盖特性、链路性能、多目标服务项目、多目标服务能力等方面进行了详细分析,结果表明在现有的近地卫星管理模式下,1颗具有多址能力的中继卫星可以管理100颗以上的近地卫星,3颗均匀分布在地球静止轨道上的中继卫星就能管理中国目前在轨和预期今后发射的所有近地卫星。除了管理数量上的优势,中继卫星的高覆盖特性还将带来管理模式上的改变,可以彻底改变当前卫星时间域集中管理的单一模式。基于多目标服务能力和高覆盖特性,初步设计了中继卫星对近地卫星的均匀测控、轮询测控和连续测控三种模式。
1 中继卫星多址业务
中继卫星安装有大口径抛物面和相控阵星间天线,为用户航天器和地面之间的高速业务数据和低速遥测、遥控和轨道测量数据提供数据中继服务,其中大口径星间天线提供一个波束服务,相控阵星间天线提供多个波束服务。S频率下利用大口径星间天线提供服务的方式被称为S频率单址方式(S-band Single Access,SSA)、S频率下利用相控阵星间天线提供服务的方式被称为S频率多址方式(S-band Multiple Access,SMA)。采用SSA模式,一颗中继卫星通常只能为一个用户航天器服务;采用SMA服务模式,一颗中继卫星可以同时为5个以上的近地航天器服务8]。
1.1 多址技术
美国中继卫星的多址技术基础是星载30阵元相控阵天线,其中收发共用阵元12个、接收阵元18个,单个阵元采用螺线构型,如图1所示,为星间链路提供前、返向信道服务。
(1)前向信道
前向发射波束在TDRS星上形成,12个螺线阵元利用5.6 dBW饱和功率放大器和双工器,向用户平台提供所需要的等效全向辐射功率(Equivalent Isotropically Radiated Power,EIRP)。某一时刻只有8个发射机同时工作。通过地面发送指令,对12个收发共用阵元的8个进行相移,形成宽约5°~8°的椭圆形发射波束,并将其指向±13°视场内的任何地方,波束形成网络原理如图2所示。
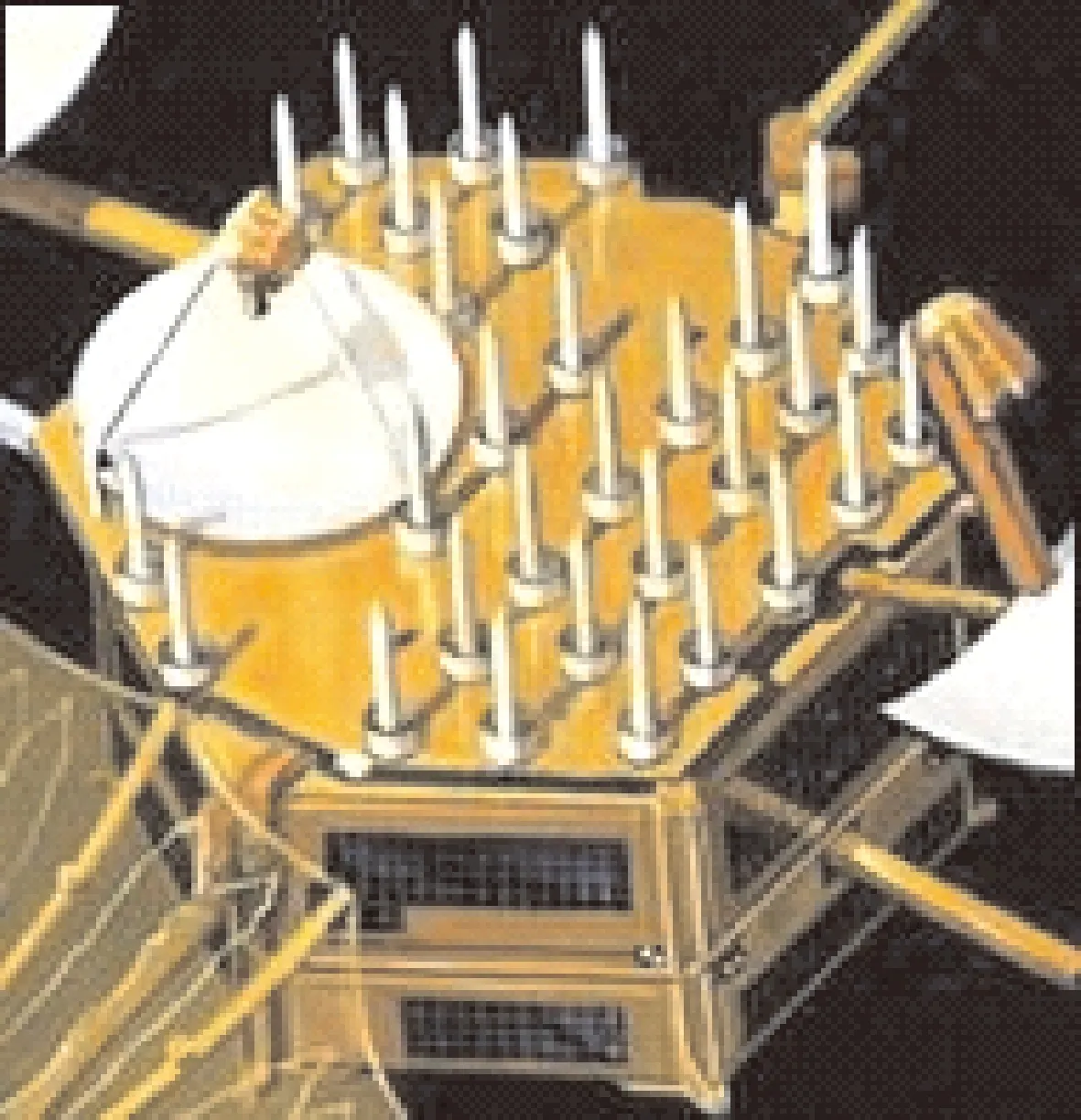
图1 TDRS相控阵天线排列示意Fig.1 Antenna array of a TDRS
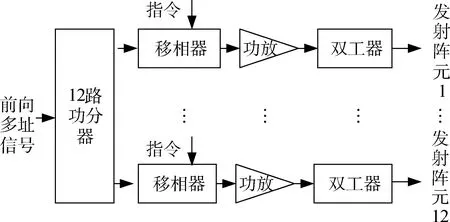
图2 TDRS前向波束形原理Fig.2 Beam forming principle for forward link
(2)返向信道
TDRS利用所有30个阵元跟踪和接收用户多址返向信号,对来自每个阵元的信号进行前置放大、下变频为中频并进行带通滤波,形成30个阵元信道频率复用信号,并发送至返向处理器,在这里与其他返向信号和TDRS遥测进行组合。组合后的复合信号经由星地下行链路传输到地面终端站。与前向波束在星上形成不同,返向接收波束在地面形成,地面终端站对接收的返向信号进行分离、相位、幅度加权和线性组合,形成6个3 dB带宽为3°的波束。
表1分别列出了TDRS的SMA前、返向信道主要性能指标,可以看出TDRS可以同时为1路最大速率10 kbit/s的前向信道、5路最大速率300 kbit/s的返向信道提供数据中继服务4]。
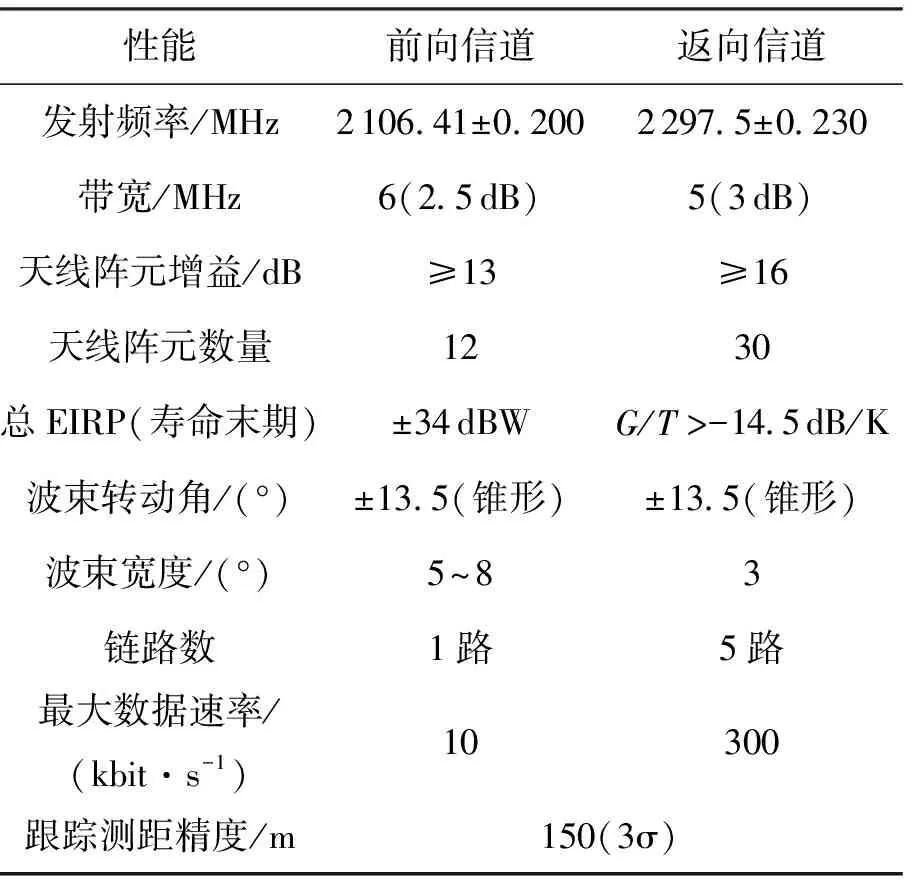
表1 美国中继卫星SMA主要性能指标
1.2 海量中继测控带来的变化
与目前基于地面测控系统完成在轨卫星的管理方式相比,利用中继SMA不仅可以扩大测控覆盖率,还可以满足海量在轨管理要求,引起卫星管理模式的改变,进一步提升卫星在轨安全性和使用效率。
(1)改变当前卫星在轨管理模式
受地面站测控可视条件限制,目前近地卫星的在轨管理采取尽能力管理模式,即每天升、降轨各连续若干圈的集中式管理,在升、降轨大约6 h时间间隙地面无法监视卫星。使用中继测控消除了测控可视条件限制,消除了升、降轨的测控间隙,可以对在轨卫星实施按需管理模式,即根据卫星管理和使用要求,采取时间间隔均匀、时间间隔可变、甚至7×24 h的无间隙管理。
(2)提高管理效率
对地观测的需求决定了近地卫星大部分采用太阳同步轨道,由于观测条件和数据接收的限制,大部分卫星过降交点的时刻相近。当采用每天升、降轨各连续若干圈的尽能力管理模式时,如果在轨卫星数量显著增加,在每天集中管理的时间内,需要同时测控的卫星数量也将显著增加,需要建立庞大的卫星管理队伍。基于中继卫星系统采用按需管理模式后,可以均匀安排测控任务,消除集中管理的弊端。
(3)增加单次测控时长
如上所述,受地球遮挡的影响,利用一颗中继卫星对近地卫星进行测控,每个跟踪圈次至少可以提供半个轨道周期的测控时间(40 min以上),为地面卫星测控中心提供足够的上行操作和执行效果判断的时间,提高了每个跟踪圈次的测控效率并增强了上行操作可靠性。
(4)提升卫星应急处置能力和业务使用的灵活性
在尽能力管理模式下,一颗卫星的升轨跟踪结束到降轨间歇地面无法监视卫星,卫星出了故障或者地面出现临时紧急观测任务时,卫星无法及时响应处理,通常会有几个小时的延误。利用中继卫星全覆盖和SMA天线指向快速电扫特性,这种卫星应急处置和业务的响应时间可以压缩到分钟量级,提升了卫星应急处置能力和业务使用的灵活性。
2 SMA支持海量近地航天器在轨 管理能力分析
中继卫星的轨道高度决定了它对近地航天器的高覆盖能力、多址服务能力使其能够管理海量的近地在轨卫星,具体管理能力分析如下。
2.1 链路性能
利用中继卫星可以完成目前地面测控系统承担的所有在轨卫星管理任务,如卫星跟踪、遥测数据接收、遥控指令发令、上行数据注入和轨道测量,中继用户终端越做越小,如美国中继终端已经发展到第四代,质量小于3.6 kg、功放功率小于5 W。当用户卫星终端采用高度不超过10 cm螺旋天线、G/T值为-26 dB/K、功放功率5 W时,利用TDRS指标计算它跟踪一颗600 km轨道高度的近地卫星,以目前通常的卫星测控链路指标前向4 kbit/s、返向8 kbit/s计算TDRS的前、返向链路,尚有余量约8 dB。
2.2 测控覆盖率
表2是以赤道上均匀分布的3颗地球静止轨道中继卫星(A、B、C)组网为例,计算它们跟踪1颗600 km轨道高度用户卫星的一个回归周期可视弧段结果9],中继终端的天线安装在卫星星体表面、波束宽度75°。从表2可以计算得出,3颗中继卫星总跟踪时长1 477.7 min,对该近地卫星的测控覆盖率达到79%,单颗中继卫星最长连续测控时间为223.6 min,有8段时间2颗中继星可以同时测控,双星最长同时测控时间32 min。
上述分析只考虑了安装一个中继天线的情况,根据任务需要可以选择合适的位置再安装一个中继终端天线,就能实现100%的测控覆盖,同时还可以提高中继测控可靠性。
2.3 测控卫星数量
受地球遮挡限制,地面测控站对卫星大部分时间不可见,因此基于地面测控站的卫星管理模式是挑选地面站可见的弧段进行测控,通常每天的升、降轨各选取几圈,而地球的遮挡使每圈一个地面测控站对一颗近地卫星的最长可见测控弧段仅为15 min,在此弧段内完成下行数据接收和上行数据发送,下面基于此进行分析。
(1)下行接收
中继卫星的一副天线1天能够测控的卫星数N:
(1)
式中:T为一副天线1天工作时间;t为一颗近地卫星1天需要测控的时间。表 3是分别按中继前、返向链路计算美国和欧洲一颗中继卫星1天能够服务近地卫星总数的计算结果,其中假设1颗近地卫星每天测控升、降轨各3圈、每圈15min。可以看出一颗使用相控阵天线的中继卫星就能够管理100颗以上的近地卫星。
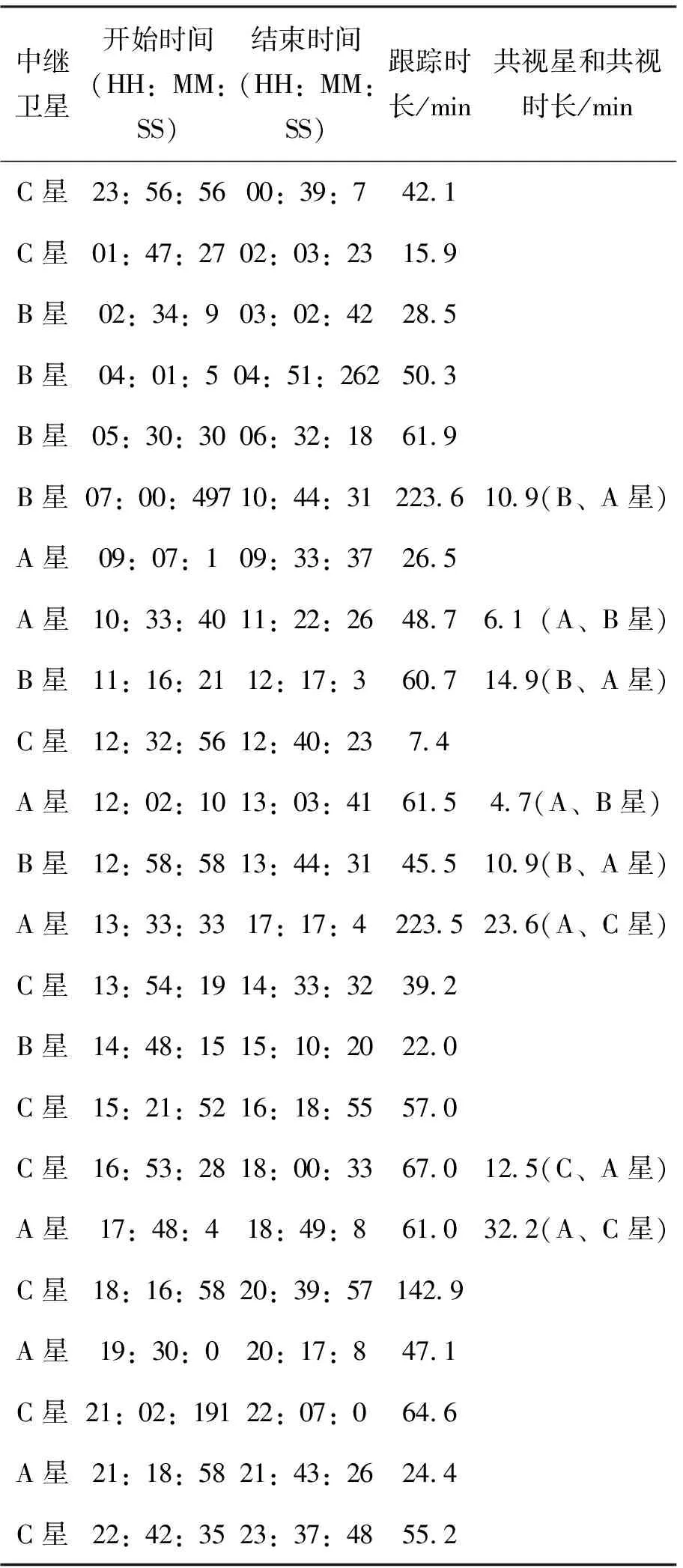
表2 可视弧段计算结果
(2)上行发射
与遥测数据连续下传不同,通常在只有在业务服务设置、状态改变和卫星平台试验时,近地卫星才有遥控上行任务,其他时间只是下行接收。因此,尽管在多址方式上,1颗中继卫星在同一时间只有一条上行链路,但通过分时方式,可以满足不同数量卫星的上行遥控或数据注入任务。以TDRS前向10kbit/s速率计算,一天上行的数量总量为864Mbit/s,如果为100颗用户星服务,每个用户星每天能够得到的上行数据量为8.64Mbit/s,按每个用户星前向速率4kbit/s速率计算,相当于每个用户星平均每天能得到36min的上行服务时间,远远满足当前近地卫星的管理要求。
因此3颗组网的中继卫星系统就能够管理300颗以上的近地卫星的下行接收和上行发射测控要求。
2.4 轨道测量和确定
(1)轨道测量
通常中继卫星系统对用户星的轨道测量数据包括单向多普勒测速、双向多普勒测速和双向距离测量。其中航天器到中继卫星之间的距离测量利用了相干转发原理,即地面站通过前向低速数据信道发送测距伪码信息,经中继卫星变频转发后由用户终端接收、解扩、滤波,并通过返向信道相干转发至中继卫星,地面终端站对中继卫星转发的返向信号进行解扩后求出地面—中继—用户星之间的四程距离和信息10]。
(2)轨道确定
中继卫星系统对用户星轨道确定的方法有两种:一是固定中继卫星轨道,将中继卫星当作一个移动的测量站,使用星星测速数据和测距数据对用户星进行精密轨道确定;二是将中继卫星自身轨道当作待求解量,联合使用用户星测距数据和中继卫星外测数据,对中继卫星和用户星进行联合定轨,同时对中继卫星和用户星轨道参数进行求解,还可以进一步提高中继卫星和用户星的轨道确定精度11]。
(3)精度分析
表4是TDRSS利用定点西经41°的TDRS-4和定点西经174.3°的TDRS-5两颗中继卫星对航天飞机轨道测量获得的单向测速、双向测速、双向测距和2颗中继星本身测距数据精度分析结果。表5是利用上述测轨数据,采用3种定轨方法计算的航天飞机位置残差情况,可以看出这3种定轨方法计算的航天飞机位置误差小于20m,满足目前近地卫星轨道确定的精度需求5]。
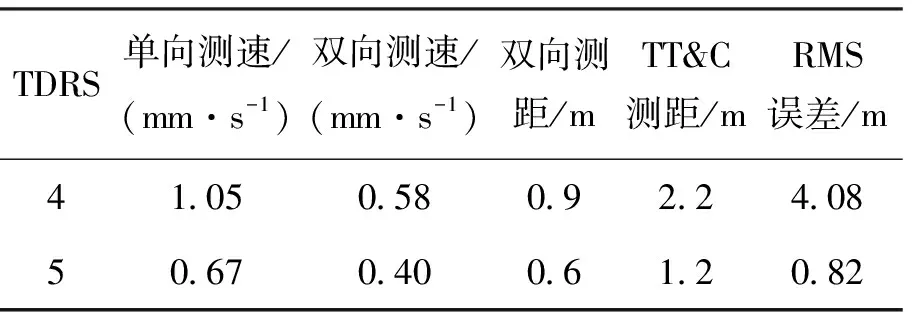
表4 TDRSS对用户星轨道测量数据精度
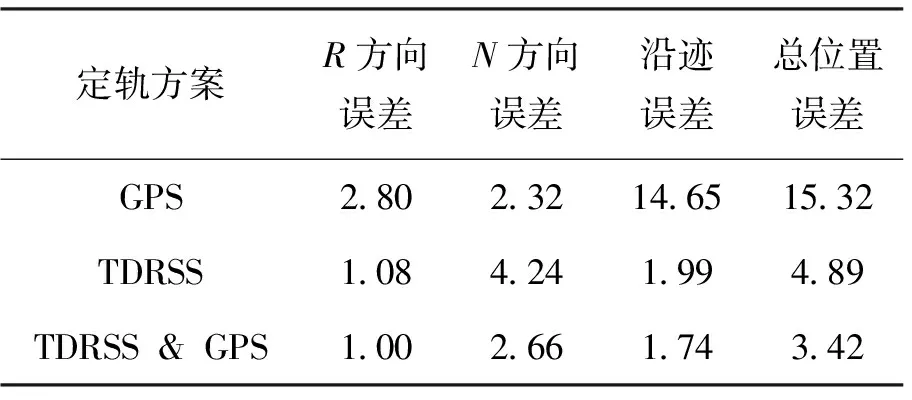
表5 多种定轨方法计算航天飞机位置残差RMS
3 SMA服务模式初步设计
在SMA模式下,根据中继卫星系统的服务能力和卫星在轨管理要求,可以为在轨航天器提供以下3种服务模式:均匀测控模式、轮询测控模式和连续测控模式,以满足不同卫星的在轨管理要求。下面以美国TDRS返向5路、前向1路的SMA能力为例进行近地卫星在轨测控初步设计。
3.1 均匀测控
卫星测控中心每天需要根据管理要求对在轨卫星进行一定圈次的在轨测控,完成卫星遥测监视、遥控发令和轨道测量等任务,使用SMA均匀测控模式,可以将这些管理圈次均匀分布在一天,每个圈次时间间隔固定,利于及时发现和处理卫星出现的问题,均匀测控工作流程如图3所示。
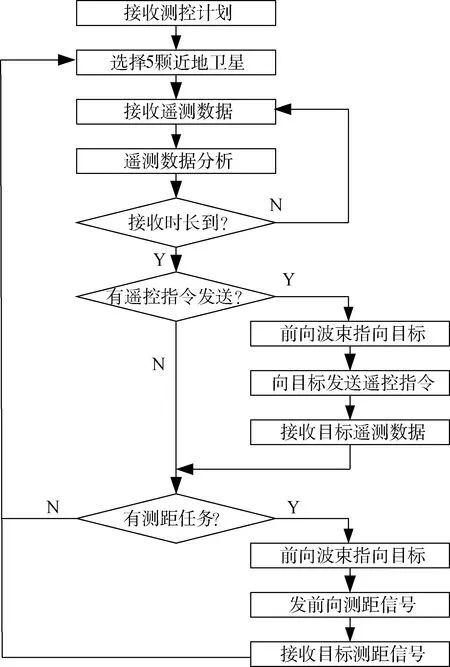
图3 均匀测控模式工作示意Fig.3 TDRS′SMA service in uniform mode
具体工作流程如下:
(1)遥测
在SMA模式下,TDRS可以同时接收5颗运行在不同轨道的近地卫星的遥测数据,假设每颗星的遥测监视时长一致,地面在设定的接收时间内,同时接收5颗卫星的遥测数据进行分析,当超过接收时长后,选择另外5颗近地卫星重复同样操作,这样依次循环,完成所有卫星的遥测监视任务。每颗近地卫星的监视频度与需要监视的近地卫星总数和监视时间长度相关,卫星总数越多、监视时长越长,监视频度就越低。
(2)遥控/注数
与卫星遥测需要频繁监视的要求不同,卫星遥控业务是只有当需要对卫星发送指令或注入数据时才会出现,有时一颗卫星一天都不需要发送一条指令,有时一天可能需要发送多条指令或注数,因此需要根据每颗近地卫星的上行需求安排遥控业务,同时,考虑到遥控发令需要遥测数据进行执行效果判断,在安排SMA对某颗近地星前向发令时,一定要接收该星的遥测数据,遥控发令/注数过程如图3所示。
(3)测距
目前所有近地卫星都已经安装GPS/BD接收设备,接收的GPS/BD信号跟随遥测信号一起传到测控中心用于轨道计算。但在实际应用中,仍会有一些卫星需要利用轨道测量数据进行定轨。使用中继卫星系统,是通过测量中继卫星与近地卫星之间的四程距离得到轨道测量信息,为完成该任务,中继卫星需要发送前向信号,用户星接收该前向信号并相干转发,由地面接收和处理后,获得中继卫星到近地卫星的四程距离和数据。因此为完成测距任务,控制SMA的前向波束指向一颗近地星,同时使用一个SMA的返向波束接收该星的测距数据。
3.2 轮询测控
新一代卫星性能强大、功能复杂,为了确保卫星整星安全,除了在遥测监视时段由地面完成卫星状态分析任务外,星上还采取了自主健康诊断系统,可以在卫星出现重大异常时自动报警。对于这种卫星,测控中心需要定期接收卫星的健康诊断结果。因此针对这类卫星,在SMA模式下专门设计一个返向波束,采用轮询方式检测每个在轨卫星的自动报警信号,其工作流程如图4所示。由于SMA模式下波束指向的切换时间在毫秒内,即使管理卫星数量多,这种轮询方式的检测间隔也能控制在很小范围内。使用这种轮询测控方式,在没有上行任务时,地面卫星测控中心可以不用监视卫星状态,只有当检测出报警信号时,才进行处理,这样能够大大提高近地卫星的测控效率和降低管理成本。
轮询模式通常工作于对近地卫星遥测接收,在该模式下只使用中继卫星的一个接收波束对近地卫星的遥测进行接收,其他的前、返向波束的使用不受影响,遥控发令、测距与均匀测控的方式相同。
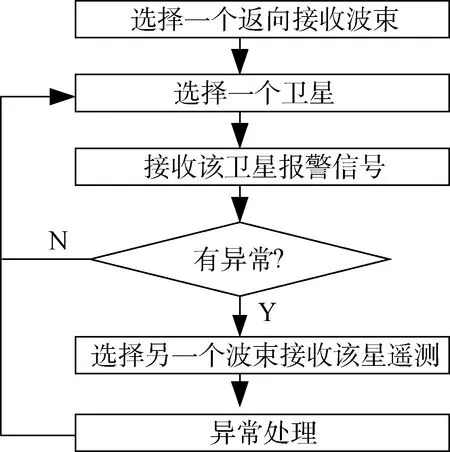
图4 轮询测控模式工作示意Fig.4 TDRS′SMA service in polling mode
3.3 连续测控
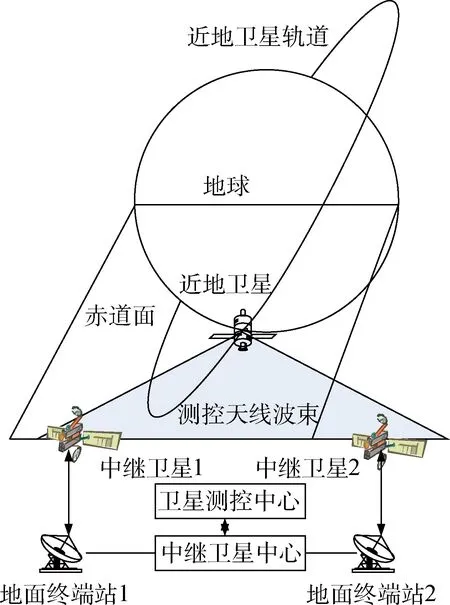
图5 连续测控模式工作示意Fig.5 TDRS′SMA service in continuing mode
3颗赤道上空均匀分布的中继卫星可以对轨道高度超过350km的近地卫星实现100%覆盖、而且相邻两颗星之间有约50%重叠覆盖区。通常一次卫星测控任务持续时间不长,使用一颗中继星就能完成任务。但也有一些在轨卫星因特殊任务要求,需要长时间连续测控。对于这种需求,可以在SMA模式下利用两颗中继星重叠覆盖特性满足这一要求,具体来说就是在重叠覆盖区使用2颗相邻的中继星SMA的各自一个返向波束,指向同一目标星,同时接收遥测、选择其中一颗中继星发令或测距;在非重叠区,对目标可视的中继星SMA返向波束指向目标星,接收遥测、发令或测距。连续测控流程如图5所示。通常卫星测控天线是全向天线,因此在连续模式下,执行接力任务的两颗星可以同时接收遥测数据,但由于卫星接收只能在一个时刻接收一个站的上行,因此在两颗星切换过程中,遥测接收不会中断。遥控上行将会中断,上行接收将由当前的中继星的前向链路切换到另一颗中继星的前向链路,但切换的时间很短,取决于卫星接收机的捕获性能,通常在秒级即可完成。
上述3种测控模式中,均匀测控模式适合在现有卫星能力和管理要求下利用中继卫星完成在轨管理,克服了卫星升、降轨之间运行到国外不可见的测控间隙;轮询测控模式适用于具有健康自主管理能力的卫星,在该模式下,能够监视卫星的数量和监视频度都可以大大提高,可以在最短的时间内发现卫星异常;连续测控模式适用于需要连续长时间卫星监视或者上行操作任务,可以保障卫星重要的测控任务。因此,如何使用上述3种SMA服务模式,需要结合卫星的能力、承担的任务和具体的管理要求进行选择,但无论如何,与现有的基于地基测控网实现近地卫星管理相比,这种管理数量和管理模式的改变改善了测控条件、提高应急处置能力、增强业务使用的灵活性和提升卫星使用效率。
4 结束语
在现有卫星管理要求下,一颗具有1路前向、5路返向多址能力的地球静止轨道中继卫星能够管理超过100颗近地卫星,多颗中继卫星组网的中继卫星系统将具有完成中国所有在轨卫星管理的能力,将改变目前卫星数量增加、地面测控站址和设备必须同步增加的困境,大大减少地面测控站的数量。同时,除了卫星管理数量的增加,使用中继卫星系统支持近地卫星在轨管理,克服现有在轨卫星时间域集中管理的缺陷,支持卫星自主诊断报警信息实时下传和在轨连续测控,将能够显著提升卫星应急处置能力、业务使用的灵活性和管理效率。
References)
[1] TUSKASA MITO,TCSHIO DOURA. The data relay and tracking satellite system: present status of NASDAJ]. Acta Astronautica,1991,24(3): 279-282.
[2] GIBBONS RICHARD. Potential future applications for the tracking and data relay satellite(TDRS Ⅱ) systemJ]. Acta Asrronaurica,1995,35(8):531-545.
[3] DAVID HARRIS.Commercial use of NASA's tracking and data relay satellite system for international communicationsJ]. Acta Astronautica,1995,35(7): 395-406.
[4] JOSEP PERDIGUES. Status of the european data relay satellite systemC]∥Proc.of International Conference on Space Optical Systems and Applications (ICSOS) 2012,Ajaccio,Corsica,France,9-12 October,2012: 256-261.
[5] 黄惠明,寇保华.以中继卫星系统为骨干的空间传输网络体系J].飞行器测控学报,2015,34(5):395-401.
HUANG H M,KOU B H. Architecture of space information transmission network using TDRSS as its backboneJ]. Journal of Spacecraft TT&C Technology,2015,34(5):395-401(in Chinese).
[6] 刘保国,吴斌. 中继卫星系统在我国航天测控中的应用J].飞行器测控学报,2014,31(6): 1-5.
LIU B G,WU B. Application of TDRSS in Chinese space TT&CJ].Journal of Spacecraft TT&C Technology,2014,31(6): 1-5(in Chinese).
[7] 孙宝升.我国中继卫星系统在交会对接任务中的应用J].飞行器测控学报,2014,33(3): 183-187(in Chinese).
SUN B S. Application of China′s TDRSS in space rendezvous and docking missionsJ]. Journal of Spacecraft TT&C Technology,2014,33(3):183-187(in Chinese).
[8] DANIEL BRANDEL. NASA′s advanced tracking and data relay satellite system for the years 2000 and beyondJ]. Proceedings of the IEEE,1990:1141-1150.
[9] 孟轶男,樊士伟,杨强文,等. 星座星间链路的空域覆盖特性仿真分析J]. 中国空间科学技术,2014,34(2):76-83.
MENG Y N,FAN S W,YANG Q W,et al. Simulation and analysis on coverage characteristics of constellation crosslinkJ]. Chinese Space Science and Technology,2014,34(2):76-83(in Chinese).
[10] 杨童,吴雨翔,李明峰. 全球卫星移动通信星座天基星间链路测控方案J].中国空间科学技术,2013,33(6):77-82.
YANG T,WU Y X,LI M F. Global satellite mobile communication constellation system space-based inter-satellite-link TC&R schemeJ]. Chinese Space Science and Technology,2013,33(6):77-82(in Chinese).
[11] 王家胜,齐鑫.为载人航天服务的中国数据中继卫星系统J]. 中国科学:技术科学,2014,44(3):235- 242.
WANG J S,QI X. China′s data relay satellite system served for manned spaceflight J].Sci.Sin.Tech.,2014,44(3): 235-242(in Chinese).
(编辑:车晓玲)
Tracking and data relay satellite system for huge number satellite control
SHAN Changsheng1, LI Yuheng1,*,SUN Haizhong2
1.BeijingSpaceInformationRelayandTransmissionTechnologyCenter,Beijing100094,China2.ChinaSatelliteLanuch&TrackingControlGeneral,Beijing100120,China
Usually,on-orbit satellites are controlled by the ground-based TT & C stations. The more on-orbit satellites are on orbit,the more TT & C stations and equipments are needed to be constructed. Meanwhile,due to the Earth surface curve,a TT & C station can cover only a few part of a satellite′s entire orbit. High coverage percentage and multiple access technology enable the tracking and data relay satellite system(TDRSS)greatly enhancing its power in space domain and frequency to control much more on-orbit low earth orbit satellites. The analysis on the link performance,multiple service items,multiple service numbers and coverage percentage manifests that a TDRSS,with its SMA technology,can control huge numbers of on-orbit low earth orbit satellites. Three tracking and data relay satellites(TDRS) uniformly stationed at geostationary orbit can control all China current on-orbit and to be lunched satellites without increasing the TT & C stations and equipments. Then three SMA service modes were described,which eliminate the TT & C control gaps caused by the earth blackout and quickly response to any emergency service. With TDRS′ SMA support,a satellite control center has more choice to control on-orbit satellites which improves its management efficiency,use efficiency and most importantly to improve the guarantee of the satellite safety.
TDRS;SMA;low earth orbit satellite;on-orbit satellite control;forward link;return link
10.16708/j.cnki.1000-758X.2017.0017
2015-07-31;
2017-01-10;录用日期:2017-01-24;
时间:2017-02-16 18:13:13
http:∥www.cnki.net/kcms/detail/11.1859.V.20170216.1813.005.html
国家863计划(2011AA7100016)
单长胜(1969-),男,高级工程师,Shangsheng_2005@sina.com,研究方向为卫星测控和中继卫星应用
单长胜,李于衡,孙海忠. 中继卫星支持海量航天器在轨测控技术J].中国空间科学技术,2017,37(1):89-96.SHANCS,LIYH,SUNHZ.TrackinganddatarelaysatellitesystemforhugenumbersatellitecontrolJ].ChineseSpaceScienceandTechnology,2017,37(1):89-96(inChinese).
V525
A
http:∥zgkj.cast.cn
猜你喜欢
河北省科学院学报(2020年1期)2020-05-25 06:57:18
电子制作(2019年11期)2019-07-04 00:34:40
电子测试(2018年13期)2018-09-26 03:30:00
电子测试(2018年6期)2018-05-09 07:31:59
电信科学(2017年6期)2017-07-01 15:44:35
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
中国学术期刊文摘(2016年3期)2016-02-14 06:14:14
中国学术期刊文摘(2016年3期)2016-02-14 06:14:14
航天器工程(2015年3期)2015-10-28 03:35:28
电子设计工程(2015年16期)2015-02-27 12:07:46