九轴车辆全轮动态转向特性研究
2017-03-27 08:11刘中英
河南工程学院学报(自然科学版) 2017年1期
刘中英
(郑州工业应用技术学院 机电工程学院,河南 郑州451100)
九轴车辆全轮动态转向特性研究
刘中英
(郑州工业应用技术学院 机电工程学院,河南 郑州451100)
为了研究九轴车辆各转向桥车轮转角之间的关系,建立了九轴车辆全轮转向模型,推导了各转向桥内外侧车轮转角的计算公式,运用数值方法进行了可视化仿真.仿真结果表明,九轴车辆采用全轮转向时,第一转向轴到第五转向轴车轮转向与后四转向轴车轮的转向相反;当第一转向轴车轮转角变大时,后面八轴车轮转角线性增加,此时九轴车辆的转弯半径最小,同一转向轴内侧车轮转角比外侧车轮转角大.
九轴车辆;车轮转角;转向模型;可视化仿真
目前,国内外学者和工程技术人员对多轴转向技术的研究大多数在三轴、五轴和七轴车辆中进行[1-6].九轴车辆由于其自身的特点(车身长26.4 m、大吨位、转向轴数目多)对转向特性的要求也更高,大大增加了其研究难度.国内对九轴大吨位车辆多轴转向技术的研究起步较晚,核心敏感技术由于国外的垄断保护而无法获得,故以某公司九轴车辆转向系统为原型,利用Matlab对整车各转向轴车辆动态转向转角进行分析.
1 建立九轴车辆全轮转向模型
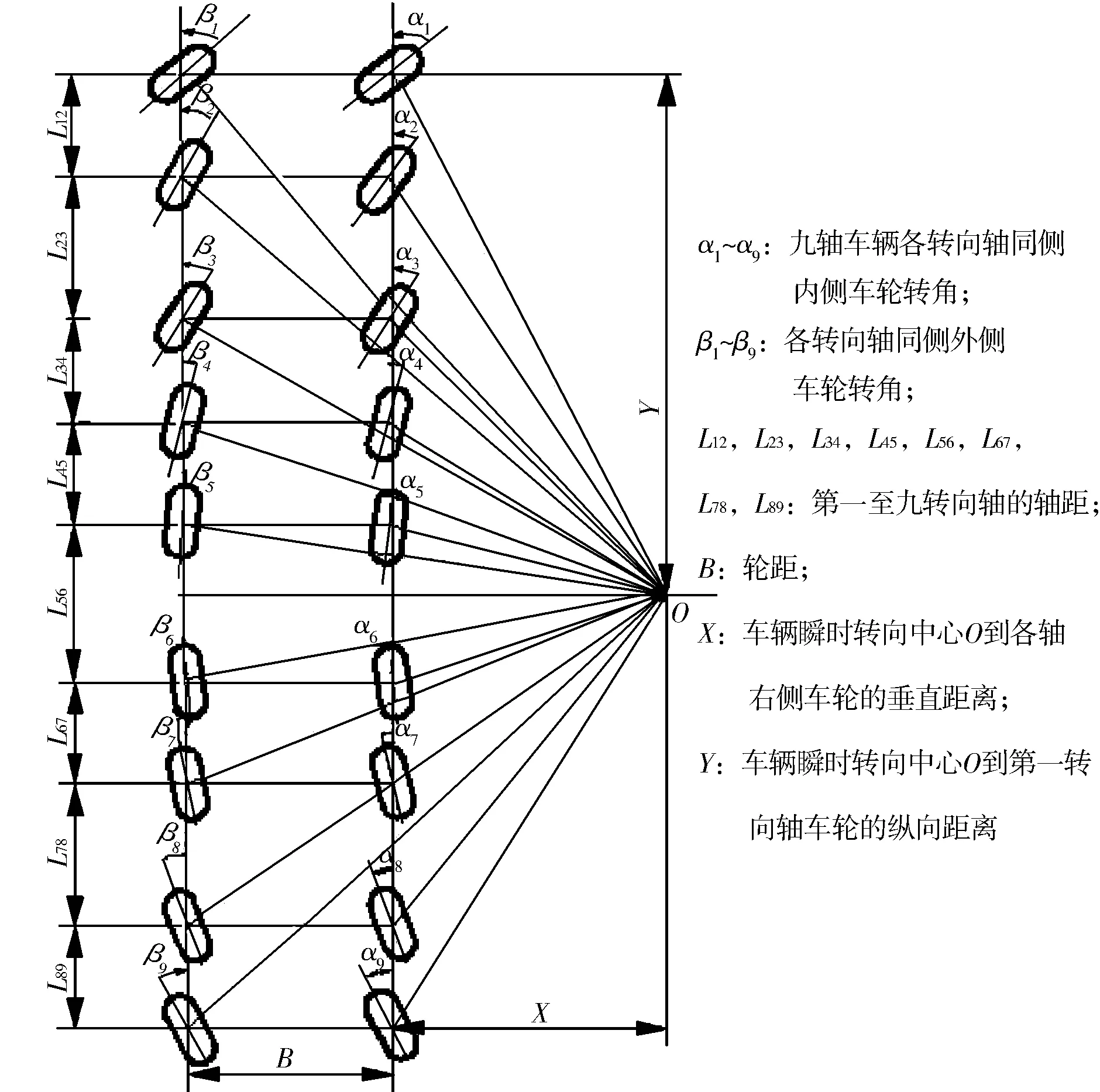
图1 九轴车辆全轮转向模型Fig.1 Full wheel steering model of nine axle vehicle
根据轴距、轮距与转向偏转角的关系,分析九轴车辆全轮转向的基本原理,参考后轴主动转向转角控制方式[7]和对千吨级全地面起重机转向特性的研究[8],采用可视化仿真方法实现九轴车辆的全轮动态转向.建立的仿真模型见图1.全轮转向模式必须满足在纯滚动条件下各转向轴车轮同时绕瞬时转向中心O转动,第一至第九轴车轮绕O点顺时针转向规定为正方向,逆时针转向规定为负方向.
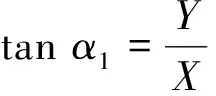
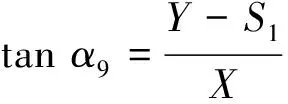
如图1所示,根据九轴车辆行驶的需要,第一轴内侧车轮转角α1由驾驶员操纵转向盘实现控制,α1与α9满足一定的转角关系.在全轮转向时,第一轴至第五轴与后面4个转向轴的转动方向相反.在第一轴到第九轴车轮做纯滚动行驶条件下,前面第一到第五转向轴内侧车轮转动时,轴线与后面4个转向轴内侧车轮转动时的垂线相交于O点(瞬时转动中心).定义S1为整车轴距,α1与α9满足如下关系:
S1=L12+L23+L34+L45+L56+L67+L78+L89,
(1)
(2)
(3)
(4)
(5)
由式(1)至式(5)可推导出九轴车辆动态全轮转向第二轴至第八轴内侧和外侧车轮转角的计算公式:

(6)

(7)

(8)

(9)

(10)

(11)

(12)

(13)

(14)

(15)

(16)

(17)

(18)

(19)

(20)

(21)
2 可视化显示九轴车辆全轮转向过程
根据式(6)至式(21),运用Matlab编写程序,对九轴车辆全轮动态转向进行可视化仿真,仿真条件满足九轴车辆内侧车轮转角为前桥同侧车轮转角的k倍,即α9=kα1(k为转向系数,当九轴车辆为全轮时,k=-1).以某公司1 200 t全地面起重机底盘转向系统为实例[9],主要技术参数见表1.

表1 九轴车辆转向系统的主要技术参数
由仿真画面可以直观地看到整车仿真时间(2 s)内的变化情况,在整车全轮转向过程中,第一轴内侧车轮转角α1由16.0°转动到25.6°(每隔0.2 s采集一次)的动态过程如图2所示.各轴距、轮距、内外侧车轮转角及瞬时转动中心的动态变量与图1中九轴车辆全轮转向模型的标注符号一致.
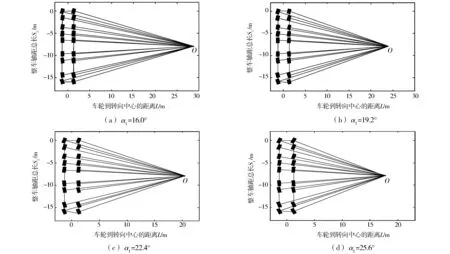
图2 九轴车辆全轮动态转向可视化仿真Fig.2 Visual simulation of dynamic steering of nine axle vehicle
由图2可知,九轴车辆各轴内外侧车轮的垂线相交于瞬时转向中心O,验证了前面九轴车辆内外侧各车轮转角推导计算公式的正确性.当第一轴内侧车轮转角为16°时,九轴车辆各轴车轮到瞬时转向中心O的距离明显大于第一轴内侧车轮转角为25.6°时的距离.因此,第一轴内侧车轮转角α1的值越大,整车所有车轮距离转向中心O的距离就随之变小.由于九轴车辆各轴内外侧车轮转角的变化,瞬时转向中心O到各轴内外侧车轮的距离在逐渐变小,车辆转弯半径也同时在变小.
3 实例分析
以某公司1 200t全地面起重机底盘转向系统相关参数为原型,根据式(6)至式(21),由Matlab编程可知,九轴车辆各转向轴内外侧车轮转角的关系如图3和图4所示.由图3可知,九轴车辆底盘采用全轮转向,距离转向中心位置O越远的车轮转角越大;随着第一转向轴内侧车轮转角的变大,第二、第三、第四和第五转向轴内侧车轮转角也正增加,随之第六、第七、第八和第九转向轴内侧车轮转角为负增加.
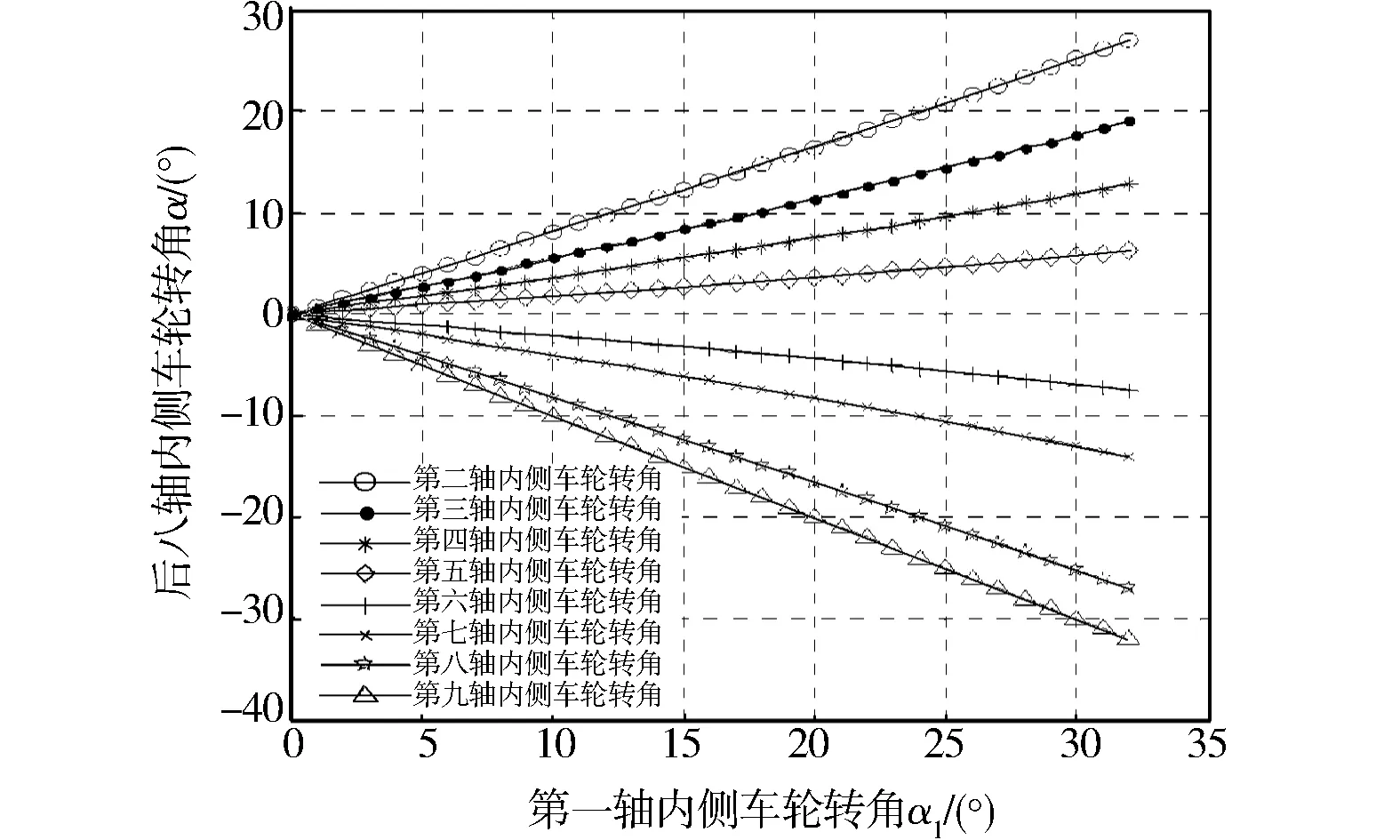
图3 九轴车辆各转向轴内侧车轮转角的关系Fig.3 The relationship between the steering wheel angle and the inner wheel of the nine axle vehicle
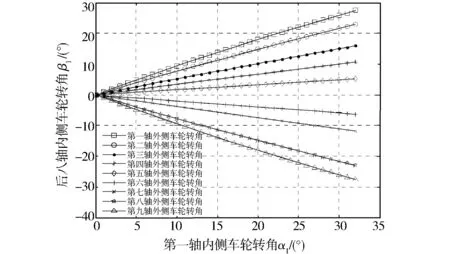
图4 第一转向轴内侧车轮与各轴外侧车轮转角的关系Fig.4 The relationship between the inner wheel of the first steering shaft and the outer wheel angle of each axle
由图4可知,当第一转向轴内侧车轮转角正增加时,九轴车辆各轴外侧车轮转角也在相应增加,第一、第二、第三、第四和第五转向轴车轮同方向转向为正增加;第六、第七、第八和第九转向轴外侧车轮转角逆方向转向为负增加;车辆采用全轮转向小转弯模式,转向中心位于第五轴与第六轴之间时可使九轴车辆底盘转向得到最小的转弯半径.
4 结语
研究轴距、轮距与偏转角的关系,验证了全轮动态转向各轴内外侧车轮转角公式是正确的,采用全轮转向,前五轴车轮转角和后四轴车轮转角转向相反,此时车辆转弯半径变小,采用小转弯模式可达到转弯半径最小,这为多轴车辆转向的设计提供了依据.
[1] 陈思忠,孟祥,杨林,等.三桥汽车多轮转向技术研究[J].北京理工大学学报(自然科学版),2005,25(8):679-683.
[2] 刘从华,赵斌,高秀华,等.多桥转向车辆转向机构优化设计[J].农业工程学报,2007,23(9):81-85.
[3] 张小江,高秀华,杨铭.多桥转向车辆的转向性能[J].吉林大学学报(自然科学版),2009,39(4):859-863.
[4] 张俊友,王树凤,李华师.五桥重型全轮转向汽车操纵稳定性分析[J].农业机械学报,2008,38(9):30-34.
[5] 王树凤,张俊友,李华师,等.不同转向模式的多桥转向车辆性能分析[J].公路交通科技,2008,25(12):184-187.
[6] 李爽.七桥车辆比例控制转向研究[D].长春:吉林大学,2008:29-30.
[7] 张元胤,罗小虹,王东华.后桥主动转向系统及其在全路面汽车起重机上的应用[J].工程机械,2010(4):49-51,99.
[8] 刘中英,贾志绚,李涵兵,等.千吨级全路面起重机转向特性研究[J].建筑机械,2014(2):82-86.
[9] 刘中英.九桥全地面起重机转向模式与模糊控制研究[D].太原:太原科技大学,2014:14-19.
Research on dynamic steering characteristics of all wheel for nine-axle vehicle
LIU Zhongying
(SchoolofMechanicalandElectricalEngineering,ZhengzhouUniversityofIndustrialTechnology,Zhengzhou451100,China)
In order to study the relationship of wheel turning angles of different steering axis,the all-wheel steering model of nine-axle vehicle was established. The calculation formulas of inside and outside wheel turning angles of different steering axis were deduced, and the visualization simulation was obtained by using the numerical method. The results showed that the turning direction of the front five and the back four steering wheels is opposite.With the increasing of the wheel turning angle of the first steering axis, the wheel turning angles of different steering axis increase linearly, while the turning radius decrease.The wheel turning angles increase with the increasing of distance to the turning center, and the inside wheel turning angle is bigger than the outside one at the same steering axis.
nine-axle vehicle; steering model; wheel turning angle; visualization simulation
2016-10-11
河南省高等学校重点科研项目(16A460038)
刘中英(1985-),女, 河南洛阳人,讲师,研究方向为多轴车辆转向特性.
TH213.6
A
1674-330X(2017)01-0033-04
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
小读者(2019年24期)2020-01-19
模具制造(2019年10期)2020-01-06
中国特种设备安全(2019年7期)2019-09-10
汽车观察(2019年2期)2019-03-15
中国特种设备安全(2018年10期)2018-12-18
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
解放军健康(2017年5期)2017-08-01
发明与创新·中学生(2016年7期)2016-05-14
探测与控制学报(2015年4期)2015-12-15