
一种采用脉冲调制器的空空导弹直/气复合控制系统稳定性研究
2017-03-23 08:29段朝阳张公平赵艳辉
导航定位与授时 2017年1期
闫 亮,段朝阳,张公平,赵艳辉
(中国空空导弹研究院,洛阳 471009)
一种采用脉冲调制器的空空导弹直/气复合控制系统稳定性研究
闫 亮,段朝阳,张公平,赵艳辉
(中国空空导弹研究院,洛阳 471009)
研究了一种采用脉冲调制器的空空导弹直/气复合控制系统设计方法及其稳定性。首先假设直接力是连续量,按照比例与气动舵进行混合,采用三回路设计方法得到混合后的控制量,之后采用脉冲调制器对得到的连续量进行调制,得到直接力装置的开关指令,最后采用非线性描述函数法分析控制系统的稳定性,在此基础上选取了合适的脉冲调制器参数,仿真结果表明了该方法的合理性。
复合控制;脉冲调制器;描述函数;极限环
0 引言
未来空战中,日益先进的战斗机对空空导弹敏捷转弯能力和末端精确打击能力提出了更高的要求。单一的气动舵难以满足这些要求,这就需要加入直接力装置来提供控制力,弥补气动舵的不足。由于直接力装置的开关特性,文献[1-3]采用滑模控制方法进行直/气复合控制系统的设计。文献[4]将直接力假设成连续量进行设计,然后采用冲量等效的方法进行离散化设计,得到开关指令,但是文中没有考虑离散化设计时系统的稳定性。文献[5]针对挠性飞行器,采用脉冲调宽调制器设计了喷嘴的开关指令,并采用非线性描述函数法分析了系统的稳定性。文献[6]针对空空导弹,采用直接力/气动力双反馈复合控制结构设计控制律,并分析了带有死区特性的直接力量化环节的稳定性。文献[7]考虑到控制用量的经济性,采用模糊控制方法设计了直接力与气动力的复合控制策略。文献[8]提出了脉冲调制等效化的方法,并给出了4种脉冲调制器的结构和原理。文献[9]设计了一种可以规避极限环并且不损失性能的非线性环节,提出了直接侧向力与气动舵面的混合控制逻辑。
本文针对空空导弹,首先将直接力当作连续的控制量,与气动舵结合,当作是单独的控制输入,采用经典的三回路设计方法设计俯仰/偏航复合控制,之后再分配给气动舵和直接力装置,直接力装置再通过脉冲调制器,得到开关指令。由于加入了脉冲调制环节,而脉冲调制器是带有死区、滞环以及饱和特性的非线性环节,因此本文讨论带有脉冲调制器的控制系统的稳定性。本文将直接力假设为连续量后与气动舵混合,将复合控制系统设计转换为单输入的控制系统设计,具有很强的工程应用性。本文通过对控制系统的稳定性分析,提出了脉冲调制器参数选取的参考依据,为脉冲调制器的工程应用提供了理论支持。
1 直/气复合控制系统模型
采用如图1所示的4喷口燃气发生器形式的直接力装置,位于导弹前端,直接侧向力垂直于弹体纵轴呈“十”字形布局。图1中,c.g表示导弹质心,xyz表示弹体坐标系。燃气发生器形式的直接力装置能够产生可以随时打开或关闭的直接力,没有响应延迟,直接力大小为2000N。
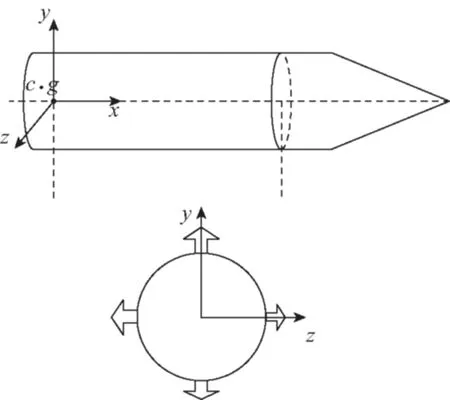
图1 导弹及直接力装置示意图Fig.1 Schematic diagram of missile and direct force device
俯仰通道数学模型如下:

(1)

(2)
(3)
其中
(4)
(5)
α为攻角,θ为弹道倾角,δ为气动舵舵偏,m为导弹质量,V为导弹速度,Frcs为直接力装置产生的侧向推力,δrcs为直接力装置的开关指令,δrcs∈[0,1],Lrcs为直接力装置产生的侧向推力的力臂,ωz为俯仰角速度,Jz为转动惯量,a1~a5为常用的气动参数。
假设直接力装置产生连续的控制量,在某个特征点下,将直接力开关指令按照一定比例等效为气动舵,令
δrcs=K·δ
(6)
则式(1)变为
(7)

(8)
同理,将式(6)代入式(2),则有
(9)

(10)
这样可以得到俯仰通道的相关传递函数如下:
(11)
(12)




根据三回路设计方法[10]设计控制增益,俯仰通道三回路示意图如图2所示。

图2 俯仰通道三回路示意图Fig.2 Schematic diagram of three-loop of pitch channel
式(6)中固定比例可以按照式(13)参考选取

(13)
2 脉冲调制器
第1节设计得到的控制量为时域连续函数,而直接力装置需要的是离散的脉冲控制量,这就需要将连续的控制信号转化为离散的脉冲控制信号。通过脉冲调制器,可以实现连续量到脉冲量的调制。常用的脉冲调制器有施密特触发器、脉冲调宽调频(PWPF)调制器、伪速率(PSR)调制器以及积分脉冲调制器。本文采用施密特触发器和PWPF调制器对连续量进行调制。
施密特触发器结构如图3所示。施密特触发器是带有死区和滞环的继电器,这种调制方式非常简单,施密特触发器前是连续的控制输入,经过调制得到的控制u是脉冲序列,用于控制脉冲发动机的开关。

图3 施密特触发器Fig.3 Schmidt trigger
PWPF调制器如图4所示。PWPF调制器由一阶惯性环节和施密特触发器两部分组成。
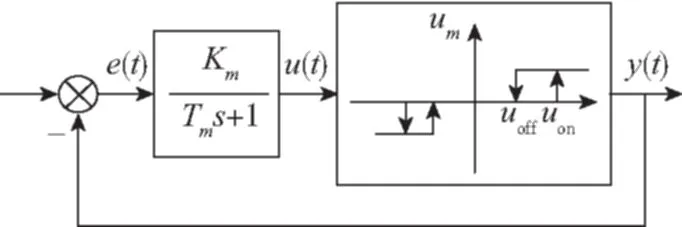
图4 PWPF调制器Fig.4 PWPF modulator
将图2中的脉冲调制器环节用图3和图4中调制器替代后,分析系统的稳定性。
3 采用描述函数法分析系统的稳定性
由于采用脉冲调制器对连续量进行脉冲调制,而脉冲调制器包含非线性环节,需要考虑带有脉冲调制器系统的稳定性。采用非线性系统的描述函数法分析系统的稳定性。
描述函数法的基本思想是:当系统满足一定的假设条件时,系统中非线性环节在正弦信号的作用下的输出可以用一次谐波分量来近似,由此导出非线性环节的近似等效频率特性,即描述函数。从而可以将线性系统的频率响应法推广到非线性系统中。
假设非线性系统可以变换成如图5所示的结构,由一个非线性环节N(A)和线性部分G(s)组成的单位负反馈系统。这里,非线性环节可能是几个物理部件的总的非线性等效环节。由于系统中存在非线性环节,常常会出现极限环现象。若系统中存在一个极限环,则该系统的所有信号必须是周期的,作为周期信号。图6中线性环节的输入能展成多项谐波之和,而由于线性环节一般都具有低通滤波特性,能够滤除高频率的信号,因而其输出必定主要由最低次谐波组成。因此,假设整个系统中的信号为基波形式是适当的。这样可以假设系统存在某个未知幅值和频率的极限环的前提下,再去证实这个系统确实存在这样的解,然后确定极限环的幅值和频率。
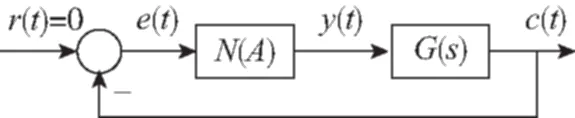
图5 带有非线性环节的系统结构示意图Fig.5 Schematic diagram of system structure with nonlinear links

图6 带有PWPF调制器的系统闭环示意图Fig.6 Schematic diagram of closed-loop system with PWPF modulator
本文以施密特触发器和PWPF调制器为例,采用描述函数法,分析闭环系统的稳定性。
施密特触发器的描述函数为

(14)
施密特触发器的输入与输出波形如图7所示。

图7 施密特触发器的输入与输出波形图Fig.7 Input and output waveform of Schmidt trigger
图7中,e0表示图3、图4、图5、图6中Uon,me0表示Uoff。
采用图3的非线性环节时,线性部分G(s)是俯仰通道的开环传递函数

(15)
如果采用图4的非线性环节,则需要进行变换。将图4中的PWPF调制器替代图5中的非线性环节,线性部分是俯仰通道的开环传递函数式(15),可以得到图6。
由图6可以得到
e=-c-y
(16)
G1·N(A)·e=y
(17)
HG·y=c
(18)

1+(HG+1)G1·N(A)=0
(18)
此时的线性部分为(HG+1)G1。
针对两种不同的脉冲调制器,根据Nyquist图分析系统是否产生极限环,如果产生了极限环则分析极限环的稳定性。
图8所示为施密特触发器的描述函数与线性环节的Nyquist曲线。其中,图8(b)是图8(a)在(-1,j0)点处的局部放大,蓝色曲线为线性部分的频率响应曲线,绿色部分为施密特触发器的描述函数曲线。从图8中可以看出,线性部分的频率曲线不包含施密特触发器的描述函数曲线,非线性系统不会产生极限环。

(a)

(b)图8 施密特触发器的描述函数与线性环节的Nyquist曲线Fig.8 Description function of Schmidt trigger and Nyquist curve of linear link
图10中,蓝色曲线为线性部分的频率响应曲线,绿色部分为PWPF触发器的描述函数曲线。从图10中可以看出,线性部分的频率曲线与非线性环节的描述函数曲线不存在交点,系统稳定,不会产生极限环。

图10 PWPF触发器的描述函数与线性环节的Nyquist曲线, Km=1,Tm=0.01Fig.10 Description function of PWPF trigger and Nyquist curve of linear link, Km=1,Tm=0.01
图11所示为PWPF触发器的描述函数与线性环节的Nyquist曲线。其中,图11(b)是图11(a)在(-1,j0)点处的局部放大,蓝色曲线为线性部分的频率响应曲线,绿色部分为PWPF触发器的描述函数曲线。从图11中可以看出,线性部分的频率曲线与非线性环节的描述函数曲线存在2个交点,其中点A处产生不稳定极限环,点B处能够产生稳定的极限环。

(a)

(b)图11 PWPF触发器的描述函数与线性环节的Nyquist曲线, Km=10,Tm=0.1Fig.11 Description function of PWPF trigger and Nyquist curve of linear link, Km=10,Tm=0.1
4 仿真结果及讨论
气动力参数取值为:a1=3.0/s,a2=40.0/s2,a3=289.0/s2,a4=1.2/s,a5=0.58/s。
导弹海拔高度H=2000m,导弹速度V=272m/s,直接力装置产生的侧向力Frcs=2000N,直接力装置的力臂Lrcs=1.2m,导弹质量m=100kg,转动惯量Jz=200kg·m2,Uon取为0.45,Uoff取为0.15,PWPF触发器中一阶惯性环节中选取两组取值Km=1,Tm=0.01和Km=1,Tm=0.1。
在极限环分析的基础上,给俯仰通道施加200/m/s2的加速度指令,仿真中主要考虑弹体上产生的加速度。两种脉冲调制器的结果如图12~图20所示。其中,图12~图14是采用施密特触发器的系统仿真结果,图15、图16是Km=1,Tm=0.1时PWPF调制器的系统仿真结果,图17~图20是Km=1,Tm=0.01时PWPF调制器的系统仿真结果。

图12 采用施密特触发器的加速度响应曲线Fig.12 Acceleration response curve using Schmidt trigger

图13 采用施密特触发器的气动舵舵偏曲线Fig.13 Pneumatic rudder deflection curve using Schmidt trigger
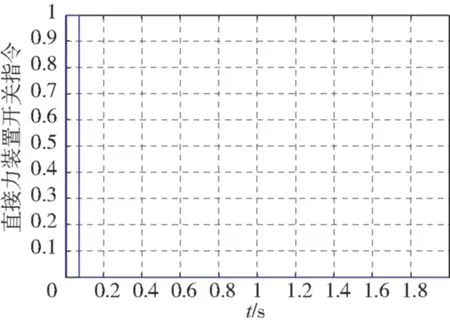
图14 采用施密特触发器的直接力装置开关指令Fig.14 Switching command of direct force device using Schmidt trigger
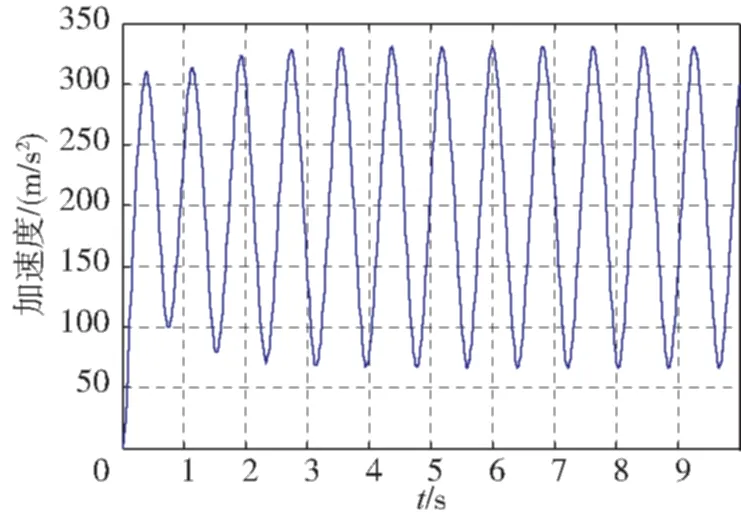
图15 采用PWPF调制器的加速度响应曲线, Km=1,Tm=0.1Fig.15 Acceleration response curve using PWPF modulator, Km=1,Tm=0.1

图16 采用PWPF调制器的直接力装置开关指令, Km=1,Tm=0.1Fig.16 Switching command of direct force device using PWPF modulator, Km=1,Tm=0.1

图17 采用PWPF调制器的加速度响应曲线, Km=1,Tm=0.01Fig.17 Acceleration response curve using PWPF modulator, Km=1,Tm=0.01

图18 采用PWPF调制器的气动舵舵偏曲线, Km=1,Tm=0.01Fig.18 Pneumatic rudder deflection curve using PWPF modulator, Km=1,Tm=0.01

图19 采用PWPF调制器的直接力装置开关指令, Km=1,Tm=0.01Fig.19 Switching command of direct force device using PWPF modulator, Km=1,Tm=0.01
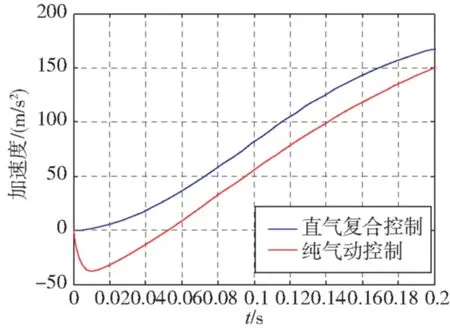
图20 采用PWPF调制器的加速度响应曲线, Km=1,Tm=0.01Fig.20 Acceleration response curve using PWPF modulator, Km=1,Tm=0.01
图20是前0.2s采用PWPF调制器的加速度响应曲线,纯气动控制在初始阶段有个向下的反冲过程,这是因为通过气动舵偏转控制导弹姿态变化,此时舵上产生的力与加速度指令方向相反,而当导弹姿态变化使得攻角增大后,弹体产生的升力逐渐抵消舵上的力,加速度响应逐渐增大。采用直/气复合控制时,控制导弹姿态的直接力与加速度指令方向相同,可以通过设计抵消气动舵产生的力,从而不会产生向下的反冲过程。同理,图12中采用施密特触发器的加速度响应会有类似的过程。
从图12~图14的结果可以看出,控制系统稳定,直接力装置在加速度响应上升段作用,提高了加速度响应的快速性。
从图15、图16的结果可以看出,系统产生了稳定的极限环,直接力装置频繁开关。这与第3节分析系统稳定性相对应,即Km=1,Tm=0.1时,系统存在稳定的极限环。
从图17~图20的结果可以看出,控制系统稳定,直接力装置在加速度响应上升段和调整段作用,提高了加速度响应的快速性。
从以上的仿真结果可以看出:采用施密特触发器的控制系统不会产生极限环,且能在一定程度上提高加速度响应的快速性,直接力的消耗较少;采用PWPF调制器的控制系统,通过调制器参数的选取可以消除极限环,加速度响应比采用施密特触发器的加速度响应的上升时间更短,但是直接力的消耗增加。因此,在实际应用中可以通过对加速度响应和直接力消耗的综合考虑,选取合适的调制器。
5 结论
本文针对空空导弹直/气复合控制系统设计,提出了一种采用脉冲调制器的设计方法。本文首先将直接力假设成连续量,然后按照固定的比例与气动舵进行了混合,在此基础上按照经典三回路设计方法得到了控制增益。之后,采用脉冲调制器对连续的直接力进行了调制,得到了直接力装置的开关指令,并利用非线性描述函数法对控制系统的稳定性进行了分析,分析结果表明采用施密特调制器的控制系统不会产生极限环,且控制系统稳定,采用PWPF调制器的控制系统通过调制器参数的选取可以消除极限环,且控制系统稳定。最后,通过仿真证明了该方法的合理性。
[1] 马克茂, 赵辉, 张德成.导弹直接侧向力与气动力复合控制设计与实现[J].宇航学报, 2011, 32(2):310-316.
[2] 闫亮, 赵玉杰, 赵艳辉, 等.空空导弹越肩发射侧向运动控制器设计[J].导航定位与授时, 2015, 2(1):11-15.
[3] 闫亮, 马克茂, 董继鹏, 等.采用直接力的空空导弹越肩发射控制设计[J].航空兵器, 2013(6):3-8.
[4] 张友安, 吴华丽, 梁勇.考虑复合控制系统动态特性的前向拦截制导律[J].宇航学报, 2015, 36(2):158-164.
[5] 耿云海, 崔祜涛, 杨涤.挠性飞行器的脉冲调制控制[J].宇航学报, 1997, 18(4):37-43.
[6] 凡国龙, 梁晓庚, 杨军.直接侧向力/气动力复合控制系统稳定性分析[J].计算机仿真, 2011, 28(6):96-100.
[7] 赵艳辉, 张公平, 杨育荣.直接力/气动力复合控制导弹的模糊逻辑自动驾驶仪设计[J].弹箭与制导学报, 2014, 34(3):33-36.
[8] 郭清晨.常值推力姿态控制方法研究[D].哈尔滨:哈尔滨工业大学, 2006.
[9] 陆艳辉, 张曙光.离散RCS的PWPF调制方式改进及混合控制逻辑设计[J].航空学报, 2012, 33(9):1561-1570.
[10] Zarchan P. Tactical and strategic missile guidance [M]. Virginia: AIAA, INC, 2007.
Research on the Stability of an Air-to-Air Missile Lateral Thrust and Aerodynamic Compound Control System with a Pulse Modulator
YAN Liang, DUAN Chao-yang, ZHANG Gong-ping, ZHAO Yan-hui
(China Airborne Missile Academy,Luoyang 471009,China)
Based on pulse modulator, a method of lateral thrust and aerodynamic compound control system design in air-to-air missile and its stability are studied. First, the lateral thrust is assumped to be continuous and blended with aerodynamic fins accordding to a certain proportion, and the compound control is designed based on three-loop control method. Then the switch order of direct force device is obtained based on the pulse modulator. At last, the stability of control system is analysed based on describing function method, and then the parameter of pulse modulator is properly chosed. Simulation results show the validity of the proposed design.
Compound control; Pulse modulator; Describing function; Limit cycle
10.19306/j.cnki.2095-8110.2017.01.008
2016-11-15;
2017-01-01。
闫亮(1988-),男,硕士,工程师,主要从事导航制导与控制方面的研究。E-mail:lemon6011@163.com
TJ765
A
2095-8110(2017)01-0042-07
猜你喜欢
湖南大学学报(自然科学版)(2021年8期)2021-09-27
导航定位学报(2021年3期)2021-06-19
电脑爱好者(2021年6期)2021-03-24
装备环境工程(2020年3期)2020-04-03
电子制作(2019年15期)2019-08-27
电脑知识与技术(2018年22期)2018-11-26
晚报文萃(2015年2期)2015-08-24
科技传播(2012年12期)2012-07-05
幸福·悦读(2015年4期)2010-11-18
职业·中旬(2009年6期)2009-07-21
