
自适应巡航控制系统检测方法对比分析
2017-03-16 02:25徐建勋游国平张仪栋颜永福
重庆理工大学学报(自然科学) 2017年2期
徐建勋,游国平,张仪栋,来 飞,王 戡,颜永福
(重庆车辆检测研究院 国家客车质量监督检验中心, 重庆 401122)
自适应巡航控制系统检测方法对比分析
徐建勋,游国平,张仪栋,来 飞,王 戡,颜永福
(重庆车辆检测研究院 国家客车质量监督检验中心, 重庆 401122)
对汽车自适应巡航系统功能及原理进行阐述,重点对国际标准ISO 15622—2010和国家标准GB/T 20608—2006的试验方法进行对比分析,同时指出试验检测过程中的相关注意事项,为车辆生产企业进行汽车自适应巡航系统的相关试验测试提供参考。
自适应巡航;试验方法;标准对比
汽车安全主要分为被动安全和主动安全。传统的被动安全装置如安全气囊、安全带、吸能器等已经广泛应用于车辆设计制造中,对减少交通事故中的人身伤害起到了重要作用。据统计,在所有类型的道路交通事故中,由追尾、偏离车道等引起的约占全部事故的40%,而且80%以上的交通事故都是由驾驶员的误操作或疲劳驾驶引起。随着电子传感器技术的飞速发展,近年汽车主动安全技术得到了质的飞越。汽车自适应巡航控制系统以半自动驾驶的方式降低驾驶员长时间高速行驶的工作强度,提高车道限速的执行力度,能大大降低汽车高速运行中的事故发生率。
本文主要阐述自适应巡航的系统功能和运行原理,对ISO 15622—2010《Intelligent transport systems—Adaptive Cruise Control systems—Performance requirements and test procedures》和国家标准GB/T 20608—2006《智能运输系统-自适应巡航控制系统性能要求与检测方法》进行对比分析,同时指出测试过程中的重要参数差异,并阐述其对测试结果的影响。
1 系统功能及原理
自适应巡航控制(ACC)系统是一种智能化的自动控制系统,它是在早已存在的定速巡航控制技术的基础上发展而来的。ACC的目的是通过对车辆纵向运动进行自动控制以减轻驾驶员的疲劳强度,保障行车安全,并通过适当的方式为驾驶员提供辅助支持[1-2]。
自适应巡航控制系统工作原理如图1所示,其主要功能是在车辆行驶过程中探测前方车辆并测量车间距(安装在车辆前部的车距传感器持续扫描车辆前方道路),同时监控本车运动状态(轮速传感器采集车速信号)、驾驶员操作指令(中断巡航指令等),将数据输入到ACC控制单元。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使ACC车辆与前方车辆始终保持安全距离。
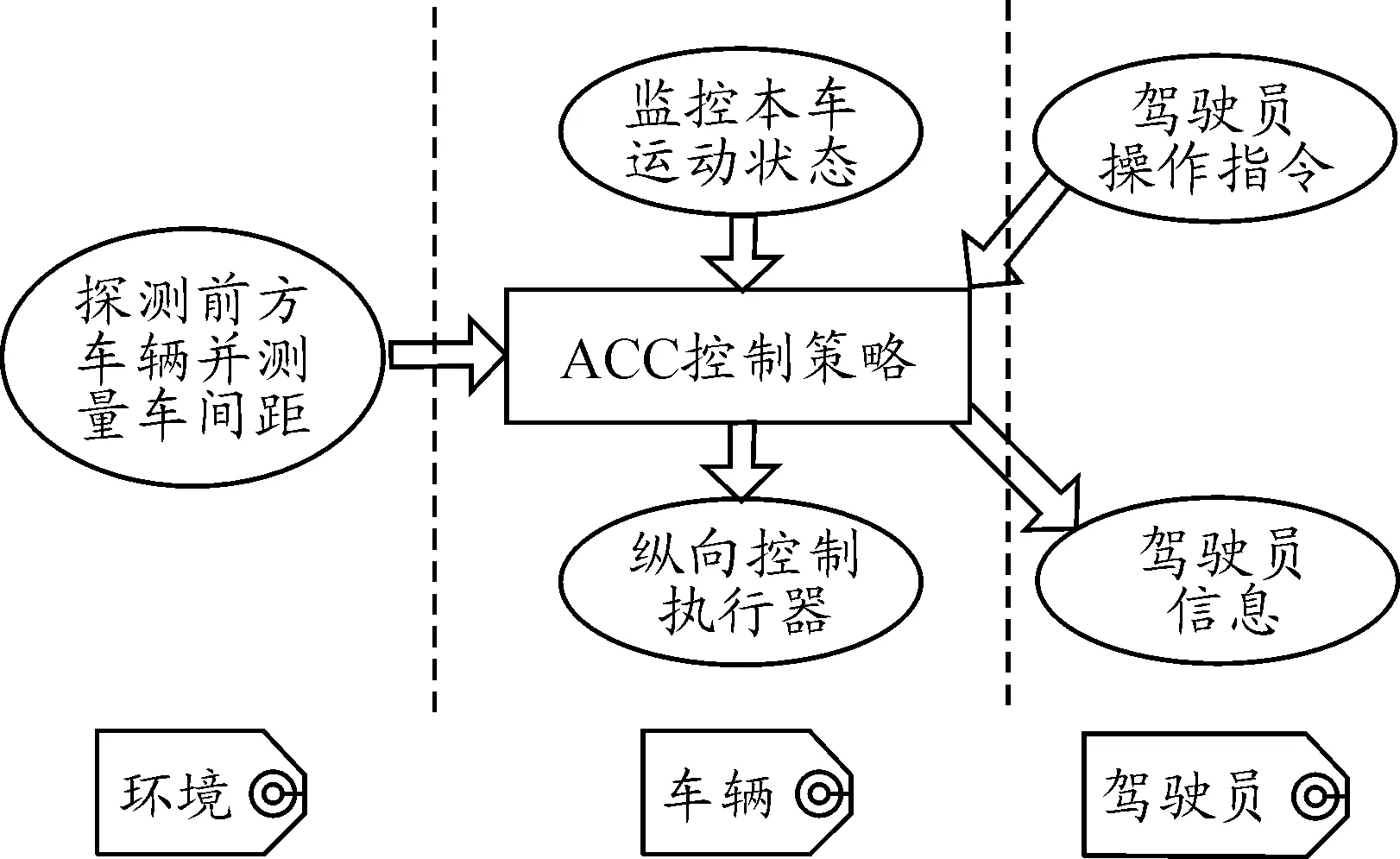
图1 ACC系统工作原理Fig.1 Working principle ACC system
车间距离传感器采用了微波雷达。当同一条车道前方没有车辆时,像通常的巡航控制一样按照设定的车速行驶;当前方出现车辆时,以低于设定车速行驶,控制本车与前方车辆在合理间距内。4种典型的功能如图2所示。

图2 ACC的4种典型功能示意图
1) 当前方无车辆时,ACC车辆将处于普通的巡航驾驶状态,按照驾驶员设定的车速行驶,驾驶员只需要进行方向控制(匀速控制)。
2) 当ACC车辆前方出现目标车辆时,如果目标车辆的速度小于ACC车辆,则ACC车辆将自动进行减速控制,确保两车的距离为所设定的安全距离。
3) 当两车之间的距离等于安全距离时采取跟随控制,即与目标车辆以相同的车速行驶。
4) 当前方的目标车辆发生移线或主车移线行驶使得主车前方无行驶车辆时,ACC系统将对主车进行加速控制,使主车恢复至设定的行驶速度。
2 测试标准差异
目前,针对汽车自适应巡航的标准主要有ISO 15622—2010和国家标准GB/T 20608—2006。由于各自的标准体系以及产品类型有所不同,国标与ISO之间的测试方法和测试参数存在部分差异。
2.1 车间时距阈值
车间时距是指本车驶过连续车辆车间距的时间间隔,如图3所示。τ=c/v,其中:c为前车尾部与本车头部之间的距离;v为本车行驶速度。

图3 车间时距示意图
当车间时距小于τmin时,车辆必须采取减速措施,以保证跟车安全。
GB/T 20608—2006中申明的车间时距要求:在各种车速情况下,τmin应大于等于1s,提供的车间时距应在1.5~2.2 s。
ISO 15622—2010中申明的车间时距要求:在各种车速情况下,τmin应大于等于0.8 s,提供的车间时距应在1.2~2 s。
由此可见,ISO 15622—2010中提出的ACC自适应巡航车距相比GB 20608—2006更近,ACC控制器作用时间需要提高约20%。由于车距更接近,能使单位路段上跟车数量提高,也可以降低由于中间穿插车辆引起的误报和紧急事故发生。同时,车距缩短也体现出国外现有ACC系统从硬件到控制策略软件等各方面的技术进步。
但是,从验证试验的角度来分析,考虑到在ACC控制策略失效的状况下反应时间将大大缩短,因此试验过程中对测试车辆的安全措施提出了更高的要求,需要驾驶机器人进行辅助保护或者设置可靠的提醒策略协助驾驶员快速介入,以避免测试过程中发生意外。
2.2 ACC的操作限制及制动灯控制
ACC作为主动安全项目,会自动介入驾驶员的驾驶活动中,其介入的时机和阈值会直接影响行驶的安全性和平顺性,因此标准中对ACC的使用最低时速及刹车介入、撤出时机等项目都提出了要求[3]。
ACC系统进行正向加速操作的前提是车速在最低巡航速度以上,即vlow=5 m/s。当ACC系统正处于关闭过程中、并且车辆速度低于vlow时,不允许突然撤销制动力。最低的设定车速应为vset_min≥7 m/s。
在ACC系统的平均减速度方面,ISO 15622—2010规定不应大于3.5 m/s,GB/T 20608—2006中规定不应大于3.0 m/s。
此条目反映了现有ISO 15622—2010中对于ACC操作的限值宽于GB/T 20608—2006的要求,ISO中规定的车辆减速度要高于GB中规定限值17%。由于减速度直接影响的是驾驶的稳定性和平顺性,因此需要避免急加速和急减速。
但是,从实际试验测试过程来看,在ISO标准中放宽减速度限值与缩短车间时距具有相关性。在相应的车间时距限值下,若不提高减速度限值,易导致ACC控制策略失效,车间时距不足以使车辆制动到安全距离,从而导致车辆追尾,因此ISO和GB中提供的减速度都要能满足各自的车间时距要求,所以在舒适性和平顺性上GB的指标更加合理。
2.3 制动灯控制(仅适用于ACC2型系统)
ACC2型系统不仅可以对发动机和变速器进行调节,还可以直接控制制动系统,以达到更有效的车间时距控制。其控制模式示意图如图4所示。在此系统工作过程中会进行自动制动操作,此时制动灯会点亮。当ACC系统执行了其他减速操作时,制动灯也需要被点亮,以提示后车[4-9]。

图4 ACC2控制模式示意图
在制动灯的控制点亮时间测试项目中,ISO 15622—2010中规定为350 ms,GB/T 20608—2006中规定为100 ms。经测试,这两个反应时间对于后车的安全警示几乎没有影响,但若后车跟随太近,则会影响后车驾驶员踩刹车踏板的时机。如反应时间为0.25 s,则在70 km/h的速度下制动能缩短2~5 m的刹车距离,会影响到行车安全。因此可以看出,GB的规定值对于后车安全性更有效,值得推广应用。
2.4 ACC测试环境温度的限定
ACC测试环境要求为平坦干燥的沥青或混凝土路面,水平能见度大于1 km。
ACC测试环境温度ISO 15622—2010规定为-20~40 ℃,GB/T 20608—2006规定为0~40 ℃。
ACC系统主要为电子部件,包括雷达、控制器、作动器等部分。ISO将试验温度扩展到常规冬季气温,充分考虑了系统工作的稳定性要求,更能综合评价ACC系统的耐候性,对于装车系统的安全性和可靠性提供了有力的试验支撑。
2.5 ACC毫米波雷达参数差异
雷达是ACC系统的重要部件,汽车上主要使用红外激光雷达和毫米波雷达。随着技术的发展,从成本和稳定性角度来看,毫米波雷达越来越多地应用于汽车行业中。毫米波雷达就是工作在毫米波波段的雷达。雷达向周围发射无线电波,通过测定和分析反射波以计算障碍物的距离、方向和大小。正如毫米波雷达名字所示,其发射的无线电波为波长在1~10 mm、频率在20~300 GHz的毫米波。汽车毫米波雷达工作频段为21.65~26.65 GHz和76~81 GHz。比较常见的汽车毫米波雷达工作频率在24,77,79 GHz这3个频率附近。
ISO 15622—2010中毫米波雷达测试频率范围为20~95 GHz。
GB/T 20608—2006中毫米波雷达测试频率范围为50~95 GHz。
由此可以看出国内外在毫米波雷达应用上的差异。国外测试频段更加宽(主要是针对24 GHz雷达产品),也代表了新型雷达的应用趋势。同时由于频段使用不同,各种抗干扰指标也有所不同,需要在测试过程中提供不同的测试工况。
2.6 弯道适应能力测试的目标车尾部安装物
弯道适应能力测试主要考核ACC系统对道路几何结构参数的预测能力,同时兼顾到ACC传感器的视野范围。其驾驶场景为:本车以车间时距控制模式跟随同一车道上的目标车(二者纵向中心线的横向偏差为±0.5 m)。测试之前,本车和目标车应满足给定的初始条件。测试车道设置示例如图5所示。

1.测试开始时,主车位于具有恒定半径的测试车道上,且满足其他初始条件;2.当主车开始减速(正确反应)或车头时距降至2/3τmax时,测试结束。
图5 测试车道设置示例
Fig.5 Example of test track layout
在目标车尾部需要安装测试目标,参考平面尺寸相同(高度0.9 m,与车身等宽),但国内外标准对于测试目标离地高度的要求有差异:ISO 15622—2010为0.6±0.1 m,GB/T 20608—2006为0.2 m。ISO更好地区分了乘用车、货车或者客车的离地间隙特征,在测试中更能体现ACC系统工作的安全范围,并提供了更可靠的试验支撑。
从实际测试结果来看,依据ISO标准的试验雷达覆盖范围有更高的要求,从而提高了系统识别率和可靠性。
3 建议
本文对汽车自适应巡航系统功能及原理进行了阐述,重点对国际标准ISO 15622—2010和国家标准GB/T 20608—2006的试验方法进行了对比分析,指出了试验检测过程中的重要参数差异,分析了其影响因素,并提出以下建议:
1) 建议尽量提升ACC策略效率,缩短车间时距,从而提高整体路面使用效率。
2) 建议使用GB/T 20608—2006的制动灯触发时间阈值,延长后车制动反应时间,提高行驶安全性。
3) 建议扩展GB标准中的环境温度范围、雷达频率范围、目标车尾部测试目标规格等参数,使国内外标准接轨,为汽车自适应巡航应用提供更好的测试手段。
[1] ISO 15622—2010.Intelligent transport systems—Adaptive Cruise Control systems-Performance requirements and test procedures[S].Switzerland:ISO copyright office,2010.
[2] GB/T 20608—2006.智能运输系统-自适应巡航控制系统性能要求与检测方法[S].北京:中国标准出版社,2007.
GB/T 20608—2006.Intelligent transportation systems-Performance requirements and testing methods of adaptive cruise control system[S].Beijing:China Standards Press,2007.
[3] 张景波,刘昭度,齐志权,等.汽车自适应巡航控制系统的发展[J].车辆与动力技术,2003,90(2):44-49.
ZHANG Jingbo,LIU Zhaodu,QIN Zhiquan,et al.Development of the Adaptive Cruise Control for Cars[J].Acta Armamentarll The Volume of Tank,Armored Vehicle and Engine,2003,90(2):44-49.
[4] 张德兆,王建强,刘佳熙,等.加速度连续型自适应巡航控制模式切换策略[J].清华大学学报(自然科学版),2010(8):1277-1281.
ZHANG Dezhao,WANG Jianqiang,LIU Jiaxi,et al.Switching strategy for adaptive cruise control modes for continuous acceleration[J].Journal of Tsinghua University(Science and Technology),2010( 8):1277-1281.
[5] 裴晓飞,刘昭度,马国成.一种汽车巡航控制的分层控制算法[J].北京理工大学学报,2012,32(3):43-47.
PEI Xiaofei,LIU Zhaodu,MA Guocheng.A Hierarchical Control Algorithm of Automobile Cruise System[J].Transactions of Beijing Institute of Technology,2012,32(3):43-47.
[6] 王景武,金立生.车辆自适应巡航控制系统控制技术的发展[J].汽车技术,2004(7):1-3.
WANG Jingwu,JIN Lisheng. Development of control technology of vehicle adaptive cruising control systems[J].Automotive Technology,2004(7):1-3.
[7] 王跃建,侯德藻,李克强,等. 基于 I TS的汽车主动避撞性关键技术研究( 一)[J].汽车技术,2003(3):3-8.
WANG Yuejian,HOU Dezao,LI Keqiang,et al.Study on key technology of active collision prevention based on ITS (I)[J].Automotive Technology,2003(3):3-8.
[8] YI K,MOON I.A driver-adaptive s top-and-go cruise control strategy[C]//Proceeding of the 2004 IE EE International Conference on Networking,Sensing & C on trol.T aipei,China:IEEE Press,2004:601-606.
[9] BRANICKY M S.Stability of sw itch ed and hyb rid systems[C] //Proceeding of th e 33rd Conference on Decision and Control. Lake Buena Vista,USA:IEEE Press,1994:3498-3503.
(责任编辑 刘 舸)
Contrastive Analysis of Adaptive Cruise Control Systems Test Procedures
XU Jian-xun, YOU Guo-ping, ZHANG Yi-dong, LAI Fei, WANG Kan, YAN Yong-fu
(National Coach Quality Supervision and Test Center, Chongqing Vehicle Test & Research Institute, Chongqing 401122, China)
The function and principle of self-adaptive cruise control system would be expounded. The difference of ISO 15622—2010 and GB/T 20608—2006 would be analyzed. The test process attentions would be pointed out and it would provide reference of ACC systems test for vehicle production enterprises.
self-adaptive cruise control; test procedure; comparative analysis
2016-11-24
徐建勋(1989—),男,博士,副研究员,主要从事车辆工程研究,E-mail:540605827@qq.com。
徐建勋,游国平,张仪栋,等.自适应巡航控制系统检测方法对比分析[J].重庆理工大学学报(自然科学),2017(2):23-27.
format:XU Jian-xun, YOU Guo-ping, ZHANG Yi-dong, et al.Contrastive Analysis of Adaptive Cruise Control Systems Test Procedures[J].Journal of Chongqing University of Technology(Natural Science),2017(2):23-27.
10.3969/j.issn.1674-8425(z).2017.02.004
U461.91
A
1674-8425(2017)02-0023-05
猜你喜欢
人类工效学(2021年5期)2022-01-15
智能制造(2021年4期)2021-11-04
绥化学院学报(2019年10期)2019-10-12
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生学习指导(中年级)(2018年11期)2018-11-29
心理科学进展(2018年8期)2018-02-21
农村农业农民·B版(2018年11期)2018-01-28
中国老区建设(2016年12期)2017-01-15
火控雷达技术(2016年3期)2016-02-06
