城市轨道交通车辆两种受电弓跟随性试验研究
2017-03-13 05:40
城市轨道交通研究 2017年2期
(中车长春轨道客车股份有限公司电气研发部,130062,长春∥第一作者,工程师)
城市轨道交通车辆两种受电弓跟随性试验研究
闫海城 陈志东
(中车长春轨道客车股份有限公司电气研发部,130062,长春∥第一作者,工程师)
为了研究城市轨道交通车辆不同驱动方式受电弓的跟随性,分别对气缸驱动弹簧受电弓和电推杆弹簧受电弓进行跟随性试验研究。试验结果表明:两种驱动方式受电弓的跟随性均随着弓网间相互作用频率的增大而变差;在受电弓自振频率附近均出现跟随性变弱的趋势;随着平均接触力增加,受电弓跟随性趋好;不同驱动方式受电弓在不同频率范围内的跟随性优劣不同。
城市轨道交通车辆;受电弓;驱动方式;跟随性试验
Author′saddressCRRC Changchun Railway Vehicles Co.,Ltd.,130063,Changchun,China
在高速铁路及城市轨道交通中,弓网系统动力学问题一直是弓网关系研究的核心,目前已有很多研究成果[1-11]。本文主要通过试验方法分析缸式受电弓(SDG-1型)与电推杆弹簧受电弓(SDG-2型)分别在不同接触力下前后滑板的跟随性情况,以及在相同作用力下两种驱动方式受电弓的跟随性能差异。
1 试验方法及内容
受电弓跟随性试验测试原理如图1所示。
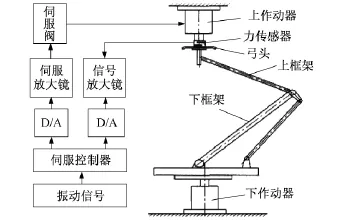
图1 受电弓跟随性试验测试原理
试验采用液压伺服控制系统控制液压作动器运动,以模拟接触线振动,并在弓头与作动器之间安装力传感器,测试其接触压力及作动器自身振动位移。在通过对两架受电弓进行频响特性试验后,得到了两架受电弓的固有频率,如表1所示。
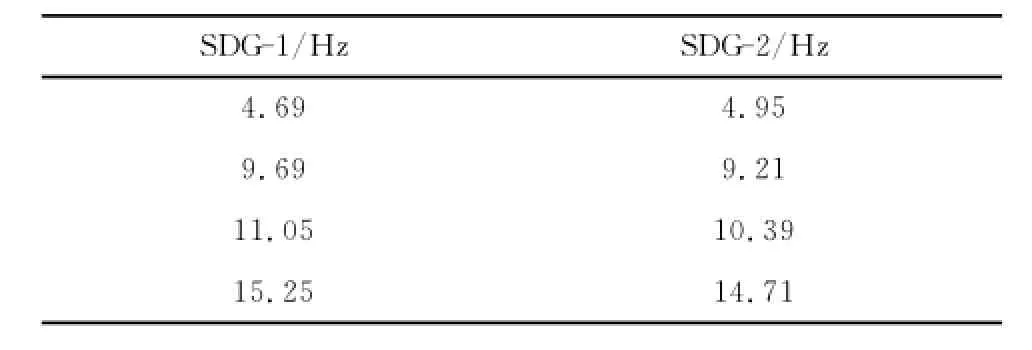
表1 SDG-1型及SDG-2型受电弓固有频率
在频率1~18Hz范围内试验,激扰频率以0.5 Hz增加,在共振频率附近激扰频率以0.25Hz增加,施加各频率下正弦扫幅激励。
弓头与作动器间的力传感器实时采集弓头与作动器间的作用力,作为判断受电弓跟随性的状态依据。在任一固定频率下作动器施加正弦扫幅激振,随着激振幅度的增大,接触力变化幅度也随之增大。当激励振幅增大到一定值后,接触压力变得没有规律,弓头与作动器间的冲击变得剧烈,力的最大值增大,最小值为零,此时受电弓出现离线现象,其幅值即为该频率下受电弓跟随性幅值。
2 试验设备及其安装
试验通过工控机生成正弦扫频控制信号,通过D/A(数字/模拟)接口将该信号的模拟量输入到液压伺服控制系统中,作为作动器的输入指令;当作动器执行指令后,作动器与滑板间将会产生相互作用力,安装于滑板与作动器间的力传感器传递信号,作动器中的位移传感器传递位移信号,并由数字采集系统记录信号。试验信号流程如图2所示,试验控制界面及数字采集系统接口如图3所示,力传感器安装情况如图4所示,试验中所用的设备如表2所示。
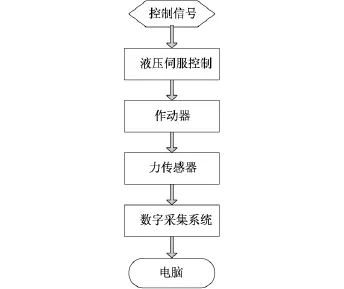
图2 试验信号流程图
试验通过作动器来施加扫幅激励,通过液压伺服控制系统来控制作动器执行指令。作动器通过螺栓固定于龙门架上(如图5所示)。
3 试验数据分析
3.1 SDG-1型受电弓试验数据分析
SDG-1型受电弓为气缸式弹簧受电弓,对此型号受电弓进行跟随性试验(见图6)。在弓头施加各个频率下扫幅信号,同时采集扫幅信号和接触力信号。SDG-1型受电弓的主要共振频率出现在4.69、9.69、11.05和15.25Hz。
获得离线情况下作动器反馈信号的位移,记录对应频率下的脱离幅值,通过数据处理后结果如图7、8所示。

图3 控制界面及数字采集系统实景图

图4 试验设备安装后的实景图

表2 试验设备
由图7可知,在平均接触力为80、90、100N作用下,受电弓前、后滑板的跟随特性随着弓网间相互作用频率的增大而变差,在受电弓固有频率附近会出现跟随性变弱趋势,在5.25~9.00Hz范围内,前滑板跟随性优于后滑板。
由图8可知,在不同接触力下,随着平均接触力增加,受电弓前、后滑板的跟随性趋好。在共振频率附近、10~13Hz及15Hz以后的频率范围,不同平均接触力下的前、后滑板跟随性差异不大。

图5 作动器实景图

图6 SDG-1型受电弓跟随性试验现场实景
3.2 SDG-2型受电弓试验数据分析
SDG-2型受电弓为电子推杆式弹簧受电弓,对此型号受电弓进行跟随性试验。在弓头施加各个频率下扫幅信号,同时采集扫幅信号和接触力信号(见图9)。SDG-2型受电弓的主要共振频率出现在4.95、9.21、10.39和14.71Hz。
获得离线情况下作动器反馈信号的位移,记录对应频率下的脱离幅值,通过数据处理后结果如图10所示。
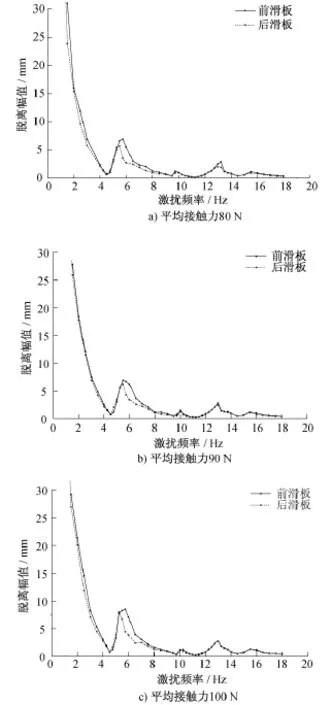
图7 同一接触力下SDG-1型受电弓前、后滑板跟随性

图8 不同接触力下SDG-1型受电弓前、后滑板跟随性
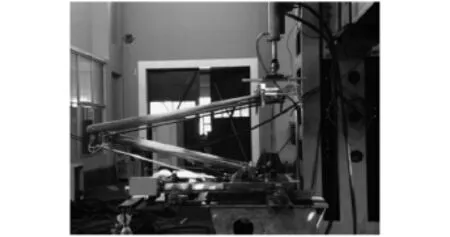
图9 SDG-2型受电弓跟随性试验现场实景
由图10可知,总体而言受电弓跟随性随着弓网间相互作用频率增大而变差,在受电弓自振频率附近会出现跟随性变弱趋势;平均接触力在80N时,前、后滑板跟随性差异不大,仅在5.0、11.5~12.0 Hz时,后滑板跟随性略优于前滑板;平均接触力在90、100和120N时,在4~5Hz范围内,后滑板的跟随性略优于前滑板;在5.25~9.00Hz范围内,前滑板的跟随性优于后滑板。对不同平均接触力下的结果进行对比,结果如图11所示。
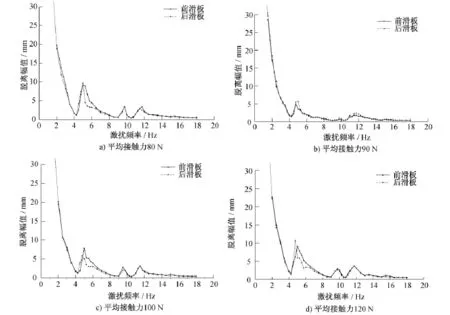
图10 同一接触力下SDG-2型受电弓前、后滑板的跟随性
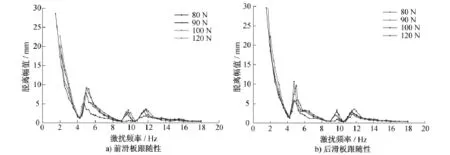
图11 不同接触力下SDG-2型受电弓前、后滑板跟随性
由图11可以看出,随着平均接触力的增加,受电弓的跟随性趋好;在共振频率附近以及13Hz以后的频率范围,不同平均接触力下的前、后滑板跟随性差异不大。
3.3 SDG-1型与SDG-2型受电弓跟随性对比
选取SDG-1型及SDG-2型在平均接触力80、 90及100N时的受电弓跟随性结果进行比较,结果如图12所示。
通过SDG-1型与SDG-2型受电弓在不同静态接触力下跟随性对比结果可知,两受电弓在不同的频率范围内跟随性优劣不同。统计两受电弓跟随性较优的频率范围,得出结果如表3所示。
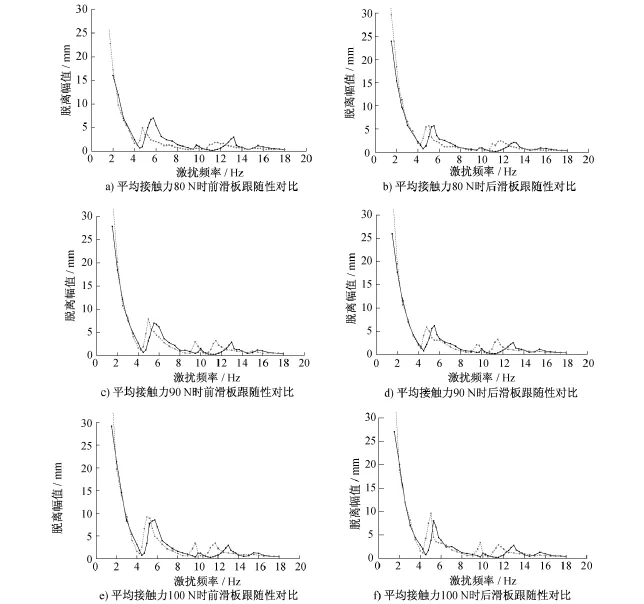
注:图中实线为SDG-1型,虚线为SDG-2型
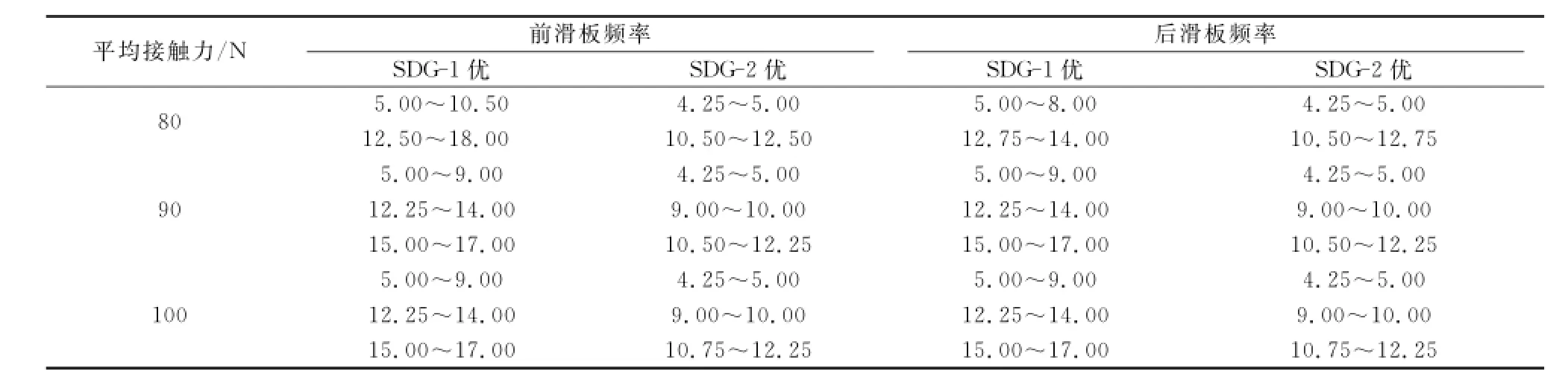
表3 不同接触力时两种受电弓跟随性较优的频率范围Hz
4 结论
针对SDG-1型及SDG-2型受电弓跟随性试验,可得出以下结论:
(1)两种受电弓的跟随性随着平均接触力的增大而变优,随着弓网间相互作用频率的增大而变劣,自振频率附近出现跟随性变弱趋势。
(2)在相同的平均接触力下,两种受电弓前、后滑板跟随性优劣的频率范围不同。
[1] 张卫华.准高速接触网动态性能的研究[J].西南交通大学学报,1997,32(2):187-192.
[2] WU T X,BRENNAN M J.Dynamic stiffness of a railway overhead wire system and its effect on pantograph catenary system dyna-mics[J].Journal of Soundand Vibration,1999,219(3):483-502.
[3] ARNOLD M,SMIEON B.Pantograph and catenary dynamics a benchmark problem an its numberical solution[J].Applied Num-berical Mathematics,2000,34:345-362.
[4] 梅桂明,张卫华.受电弓/接触网系统动力学模型及特性[J].交通运输工程学报,2002,2(1):20-25.
[5] 刘怡,张卫华,梅桂明.受电弓/接触网垂向耦合运动中接触网动应力研究[J].铁道学报,2003,25(4):23-26.
[6] PARKA T J,HANB C S,JANGC J H.Dynamic sensitivity analysis for the pantograph of a high-speed rail vehicle[J].Journal of Sound and Vibration,2003,266(2):235-260.
[7] LOPEZ-GARCIA O,CARNICEROA A,TORRESB V.Computation of the initial equilibrium of railway overheads based on the catenary equation[J].Engineering Structures,2006,28:1387-1394.
[8] METRIKINEA V,BOSCH A L.Dynamic response of a twolevel catenary to a moving load[J].Journal of Sound and Vibration,2006,292:676-693.
[9] ZHANG Weihua,LIU Yi,MEI Guiming.Evaluation of the coupled dynamical response of a pantograph catenary system:contact force and stresses[J].Vehicle System Dynamics,2006,44(8):645-658.
[10] 陈维荣,李文豪,张倩,等.几种受电弓/接触网系统性能的比较[J].西南交通大学学报,2009,44(3):356-358.
[11] 周宁,张卫华.双弓作用下弓网动力学性能[J].西安交通大学学报,2009,44(4):552-557.
Experimental Study of Pantograph Following Performance in Two Driving Modes for Urban Rail Transit Vehicle
YAN Haicheng,CHEN Zhidong
In order to study the pantograph following performance in two diffferent driving modes for urban rail transit vehicle,the following performance experiments of cylinder spring pantograph and electrical putt spring pantograph are studied respectively.The results show that in both cases,the pantograph following performance is deteriorated due to the increasing frequency of the gateway arch interacted with the pantograph catenary,and the weaker trend of pantograph following performance is influenced by the natural frequencies in the vicinity of pantograph.With the average increase of contact force,the pantograph following performance tends to become better.It is clear that different driving modes within different frequency ranges will directly influence the pantograph following performance.
urban rail transit vehicle;pantograph;driving mode;following performance experiment
U270.38+1
10.16037/j.1007-869x.2017.02.007
2016-09-01)
猜你喜欢
测控技术(2018年11期)2018-12-07
时代农机(2018年12期)2018-02-14
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
航空制造技术(2015年3期)2015-05-30
浙江大学学报(工学版)(2015年8期)2015-03-01
舰船电子工程(2013年4期)2013-07-11
计算机辅助工程(2012年5期)2012-11-21
振动与冲击(2012年4期)2012-09-15