基于扩展目标先验的贝叶斯压缩感知成像
2017-03-12 06:41王天云刘冰丛波凌晓冬
雷达科学与技术 2017年4期
王天云, 刘冰, 丛波, 凌晓冬
(中国卫星海上测控部, 江苏江阴 214431)
0 引言
近年来,高分辨率成像雷达因其在民用领域和军用领域的巨大应用潜力,成为雷达领域的重要发展方向之一。其中值得一提的是,基于压缩感知(Compressed Sensing, CS)理论的高分辨率成像技术因为在仅需较少的观测样本就能获得非常高的成像效果,受到了国内外学者的广泛关注。当前已有研究文献利用目标自身的稀疏先验信息,对CS成像方法(如贪婪算法、统计优化算法等)进行了广泛而深入的研究[1-2]。
然而,上述成像方法在处理过程中通常基于如下前提——即目标自身的稀疏性非常好。考虑到实际情形中,尤其是大型刚体目标(如飞机、舰船等),其距离维及方位维通常存在扩展特性造成成像场景的散射点较多且呈区域性分布[3-5],此时目标空间域的稀疏性相对较差,因此直接应用传统CS成像方法,会导致传统稀疏重构方法的成像性能受限,尤其是在信噪比较低或者CS测量数目较少情形时,目标的形状或轮廓信息不能得到较好的反演[6-7]。这是因为它们在目标稀疏重构的过程中没有考虑扩展目标图像的结构信息。
对扩展目标而言,成像区域除了散射点满足稀疏性之外,还存在一些额外的先验信息,比如目标连续区域边界也满足稀疏性等。这些因素在以往的CS成像方法[6-7]中均被忽略。因此如何有效地利用目标图像的结构信息来进一步提高成像质量,并拓展已有的稀疏成像方法,是本文研究的重点。
基于此背景,本文在传统目标稀疏先验基础上,进一步考虑利用扩展目标图像的结构信息,在贝叶斯框架下利用目标场景连续性分布的先验特性,提出基于扩展目标先验分布的贝叶斯压缩感知成像技术。具体做法如下:首先,对每个网格上目标散射点赋予伯努利-高斯(Bernoulli-Gaussian)先验概率[8]以促进目标稀疏性;然后,根据散射点服从的不同的连续模式(即用来刻画扩展目标图像的连续特性)推导各参数服从的后验概率估计;最后,再利用变分贝叶斯(Variational Bayesian, VB)[9]方法交替迭代求解,直至收敛,即能重构目标图像。仿真结果验证了所提方法的有效性,并展示在相同雷达系统配置模式下相比传统稀疏重构方法的优势。
1 信号模型
1.1 雷达成像模型简介
众所周知,在波恩弱散射近似条件下,雷达成像问题可以利用下述线性方程进行统一表征[10]:
y=Aσ+n
(1)
传统稀疏重构方法一般是将式(1)转化为如下优化问题的求解:

(2)
式中,φ(σ)可以为l1范数(如BP方法)[11]、lp范数(如FOCUSS方法)[12]约束等。
根据前面分析,对大型刚体目标进行成像时,其距离维及方位维通常存在一定的扩展特性,此时成像场景中的散射点较多且呈区域性分布,因此目标空间域的稀疏性将大大减弱,采用式(2)对应的传统CS成像方法所能获得的目标稀疏重构结果常常并不理想[7-8],这是因为它们在稀疏重构过程中没有考虑扩展目标图像的结构信息。
1.2 基于扩展目标先验的贝叶斯压缩感知成像
借鉴文献[13]的思想,本文首先构建了如图2所示的扩展目标稀疏贝叶斯先验模型,具体描述如下。
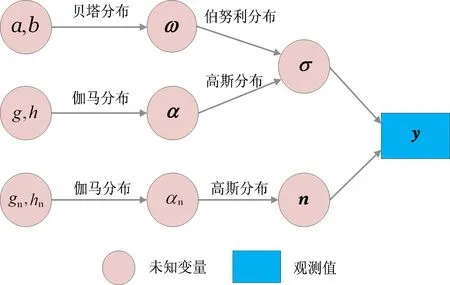
图2 扩展目标稀疏贝叶斯先验模型
1.2.1 目标稀疏先验模型
p(σi|ωi,αi)=(1-ωi)δ(|σi|)+
(3)
式中,1≤i≤UV,ωi为伯努利分布的参数,服从贝塔分布(因为贝塔分布与伯努利分布成共轭先验),即ωi~Beta(a,b),a,b是贝塔分布的参数,表达式为
(4)

(5)
再假定各散射点的散射系数σi满足独立同分布,则目标散射系数矢量σ的概率分布为
(6)
1.2.2 噪声模型

(7)
进一步,假定噪声功率倒数αn服从参数为gn,hn的伽马(Gamma)分布:
(8)
1.2.3 改进的贝叶斯压缩感知成像算法
由图2所示的扩展目标贝叶斯稀疏模型,利用基于最大后验(Maximum A Posteriori, MAP)准则[14]得到回波矢量y的后验概率分布:
p(σ,ω,α,αn|y)∝p(y|σ,αn)·
p(σ|ω,α)p(ω)p(α)p(αn)∝
(9)
根据之前赋予相关参数的先验概率分布,通过式(9)可以直接计算出各随机变量服从的后验概率密度函数。
步骤1:σi的后验概率为
p(σi|σ/σi,y,ω,α,αn)∝
式中,

(11)

步骤2: 在求解αi的后验概率时,文献[13]考虑了3种可能的目标连续性模式,如图3所示的model 1~model 3。本文将其推广至6种可能的连续性模式,如图3所示的model 1~model 6,其中图中阴影方块表示该处的散射系数值不为0,白色方块表示该处的散射系数值为0。
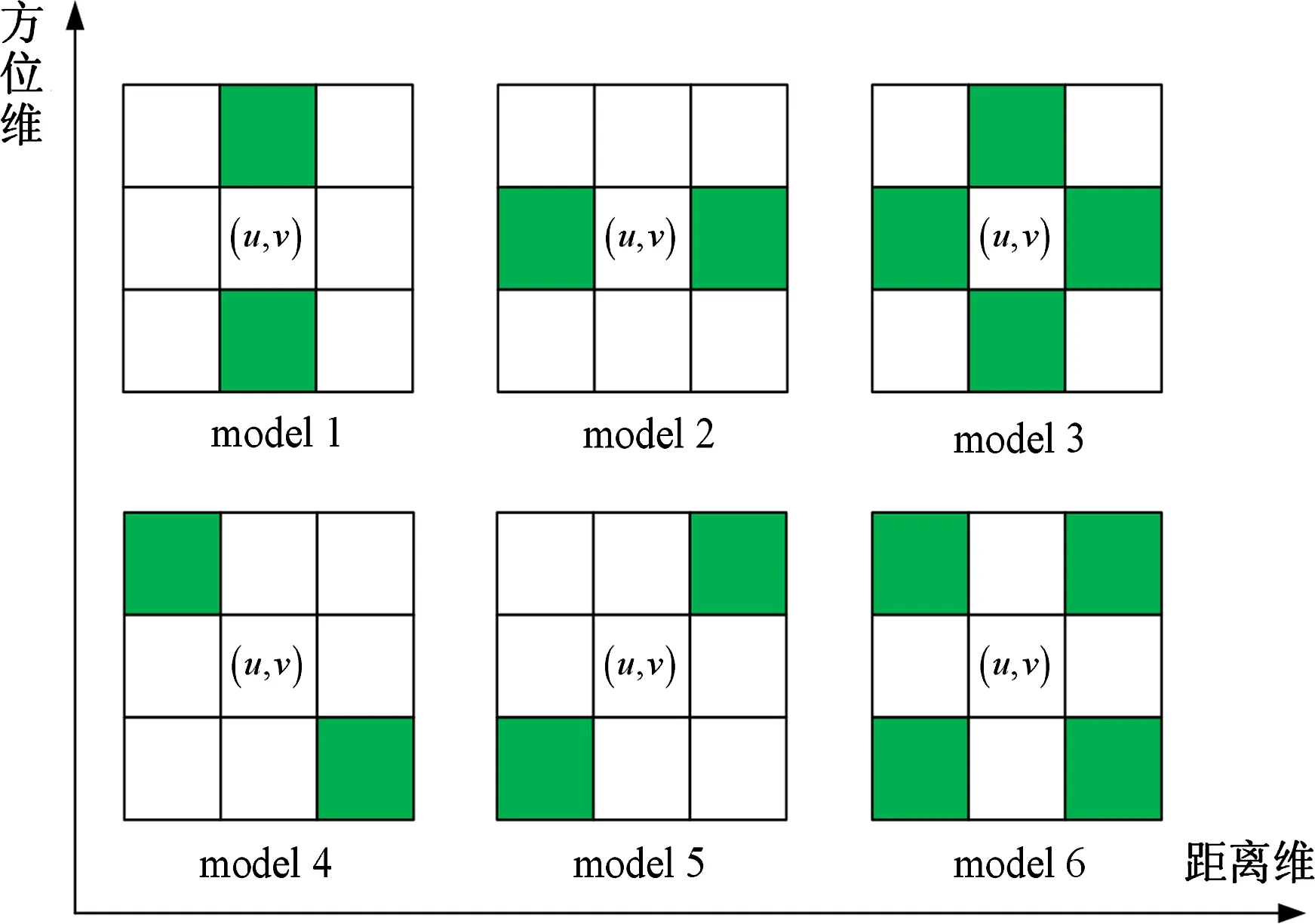
图3 表征扩展目标散射点分布的6种连续模式
1) 若第i个散射点(即第(u,v)个网格)符合第3种连续模式,那么αi的后验概率为
(12)

(13)
经推导,αi的均值为
(14)
2) 若第i个散射点满足第1或第2种连续模式,那么αi的后验概率为
(15)

(16)
经推导,αi均值为
(17)
3) 若第i个散射点不满足第1,2,3种连续模式但满足第6种连续模式,那么αi的后验概率为
(18)

(19)
经推导,αi均值为
(20)
4) 若第i个散射点不满足第1,2,3种连续模式但满足第4或第5种连续模式,那么αi的后验概率为
(21)

(22)
经推导,αi均值为
(23)
5) 若第i个散射点不满足任意一种连续模式,类似地,得到αi的后验概率为
(24)
经推导,αi均值为
(25)
步骤3: 在求解ωi的后验概率时,与文献[13]的做法类似,本文考虑了如下3种可能的稀疏模式:
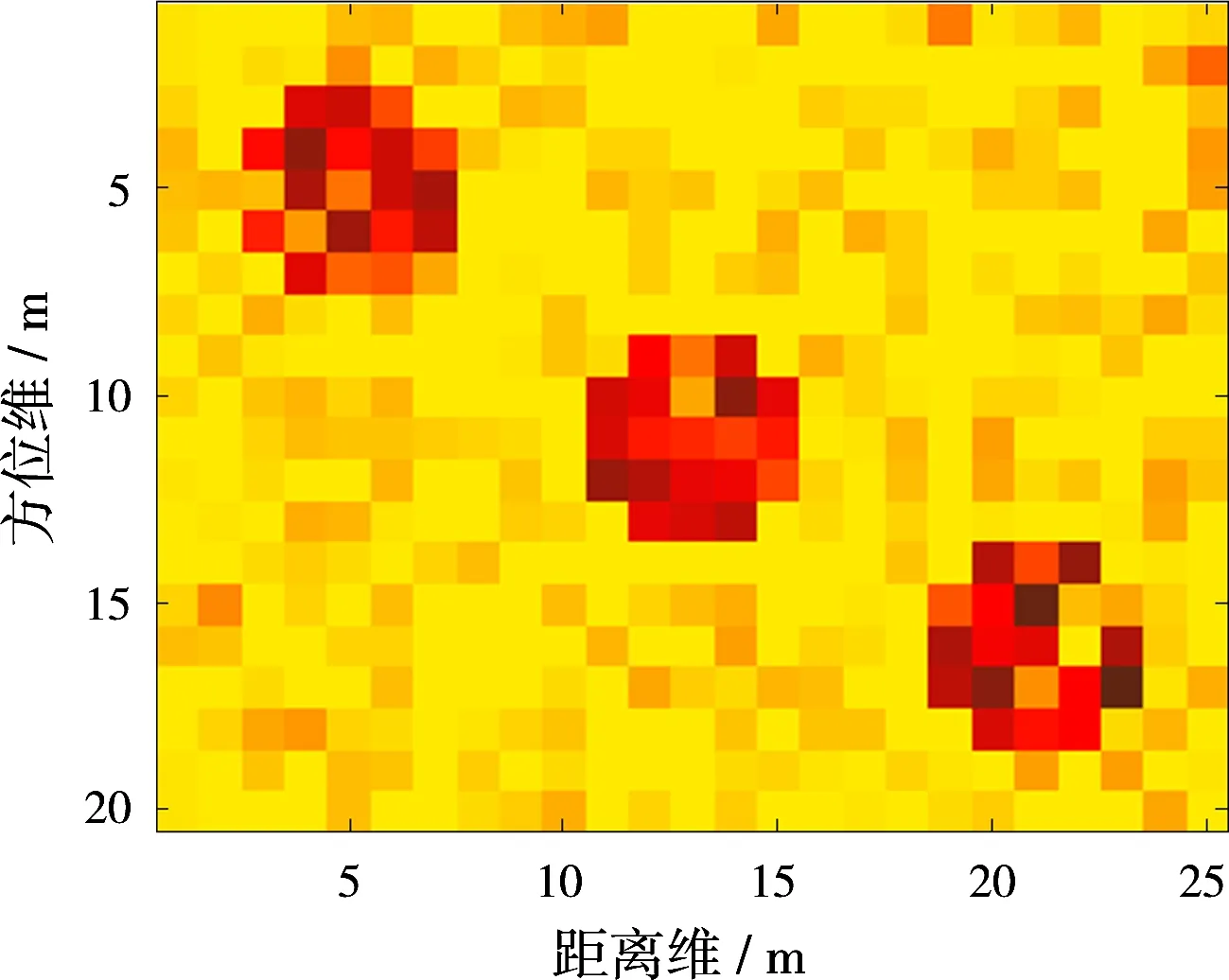
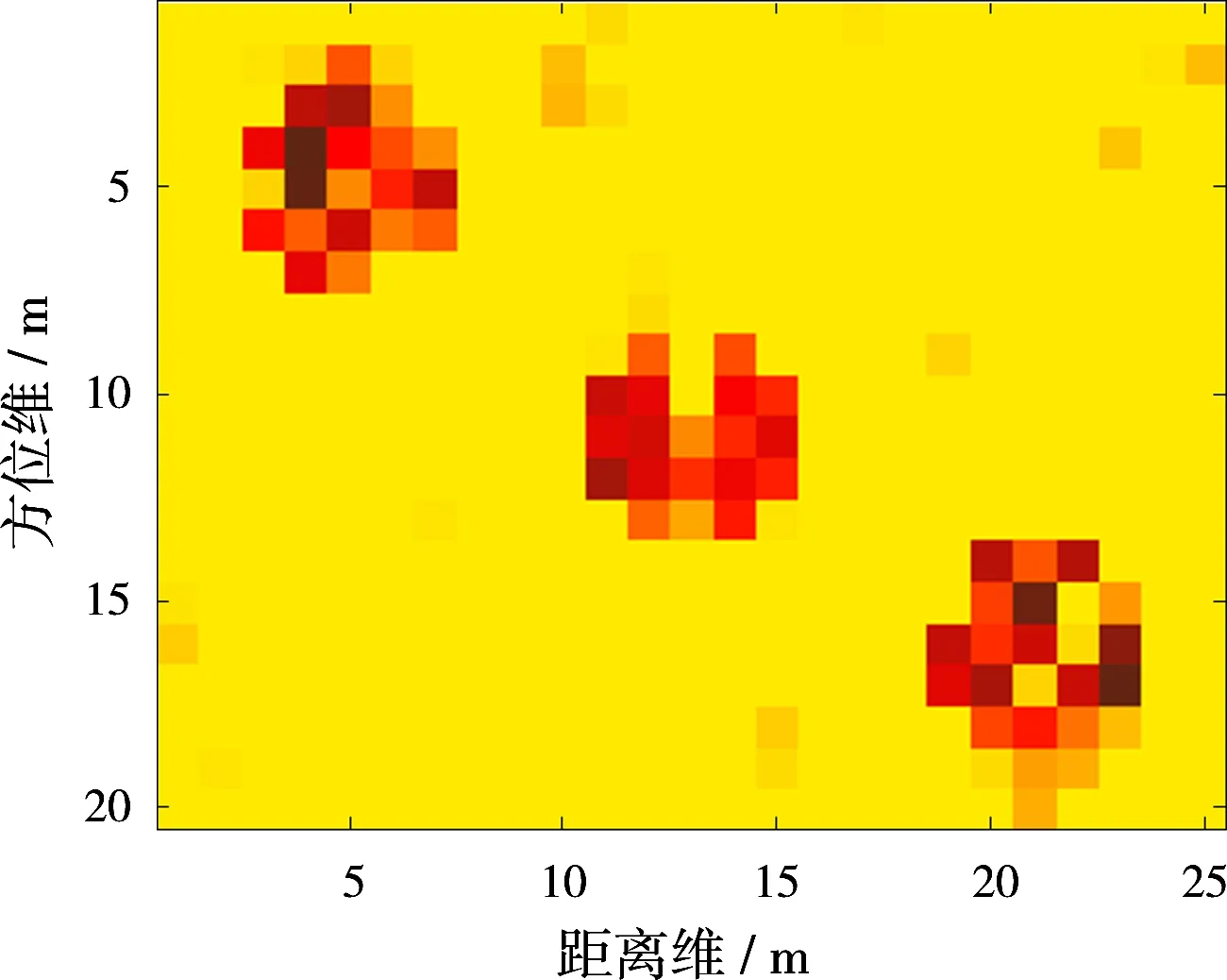
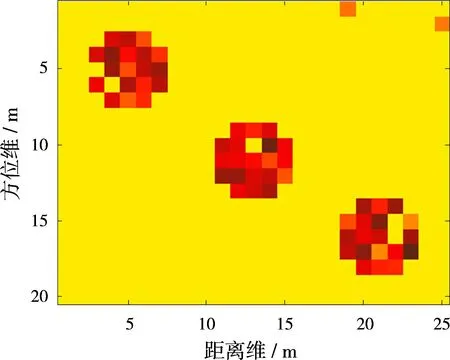
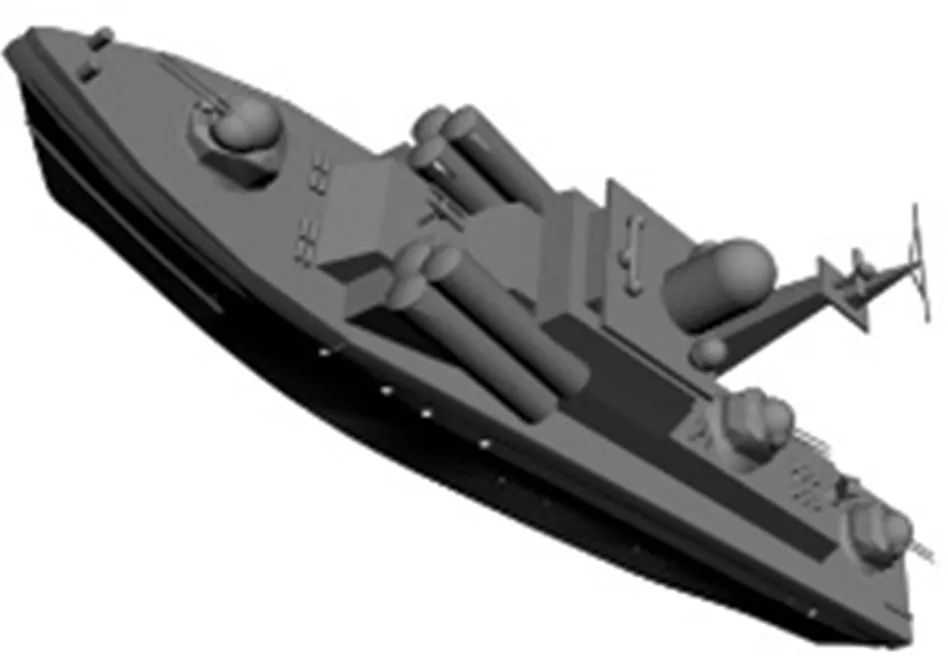
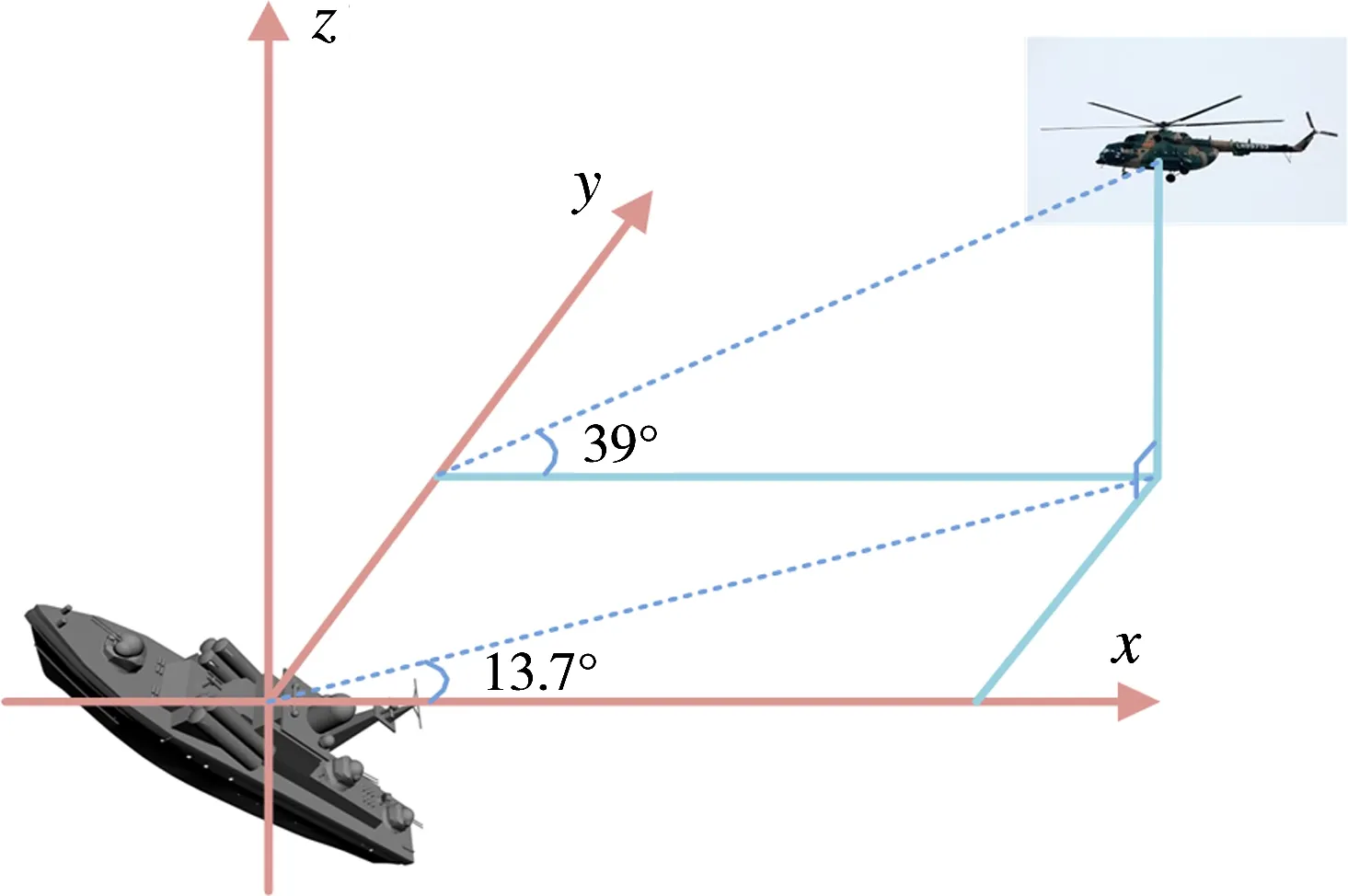
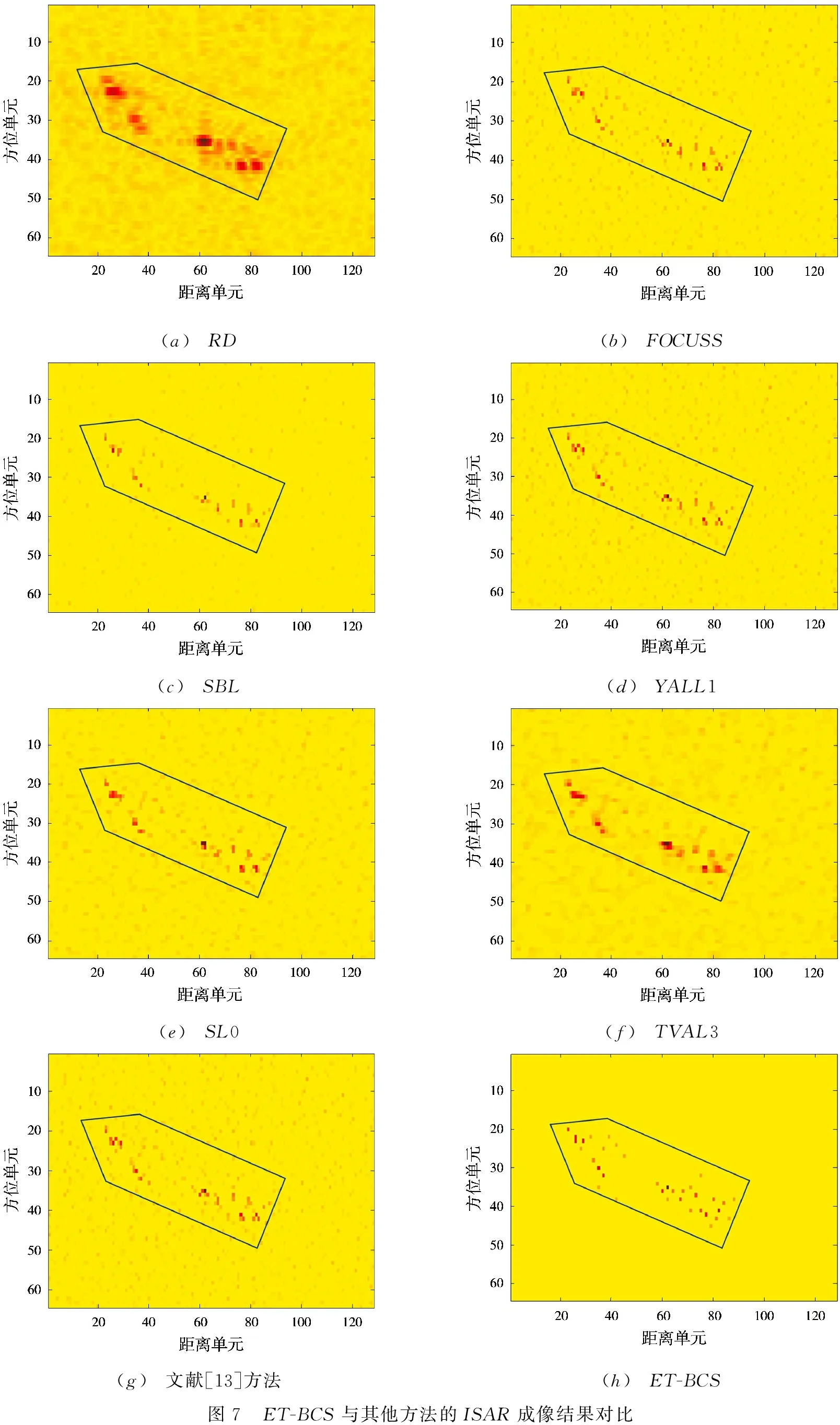
1) 稀疏模式1:第i个散射点周围的点散射系数都为0,设置ωi先验概率中的参数a,b满足a0 2) 稀疏模式2:第i个散射点周围的点满足任意一种连续模式,设置ωi先验概率中的参数a,b满足a1>b1,此时ωi趋于1,即σi趋于非0。 3) 稀疏模式3:第i个散射点周围的点不符合以上两种情况,设置ωi先验概率中的参数a,b满足a2=b2;此时ωi趋于1/2,即σi取0或者非0的概率相等。 相应地,ωi的后验概率为 (26) 可以看出,ωi的后验概率是贝塔(Beta)分布的形式: (27) 根据式(27),得出ωi的均值为 (28) 步骤4: 最后求解噪声功率倒数αn的后验概率,经推导αn也服从伽马(Gamma)分布: p(αn|σ,gn,hn)=Γ(αn|gn+M,hn+ (29) 根据式(29),得出αn的均值为 (30) 依据以上各随机变量的后验概率分布和相应的均值,本文采用VB方法求解式(9)对应的贝叶斯推断问题,通过交替迭代求解各随机变量的均值,直至收敛,即能准确重构目标图像。与文献[13]采用Gibbs求解方式相比,本文基于VB方法具有更高的参数提取精度,这可以通过后续的仿真结果对比看出。 综上所述,基于扩展目标先验分布的贝叶斯压缩感知成像算法流程如下: 输入:y,A,lmax; 初始化: ①g=h=gn=hn=10-6; ② (a0,b0)=(1/M,1-1/M), (a1,b1)=(1/M,1/M), (a2,b2)=(1-1/M,1/M); ③ 目标散射系数σ的初始估计:〈σ〉(0)=AHy; ④α的初始估计:〈α〉(0)=1/AHy; ⑤ω的初始估计:〈ω〉(0)=1; ⑥αn的初始估计:〈αn〉(0)=1/var(y)×10-2; ⑦ 迭代次数:l=0; 循环: ① 下标赋初值i=1; ③ 判断σi周围的点满足何种连续模式,分别根据式(14)、式(17)、式(20)、式(23)、式(25)估计〈αi〉(l+1); ④ 判断σi周围的点满足何种稀疏模式,根据式(28)估计〈ωi〉(l+1); ⑤ 如果i ⑥ 根据式(30)估计〈αn〉(l+1); ⑦ 如果‖〈σ〉(l+1)-〈σ〉(l)‖ / ‖〈σ〉(l)‖≤10-6或l+1≥lmax程序终止,输出结果;反之,令l=l+1,程序跳转至循环第①步。 下面通过仿真验证所提成像方法的有效性。 实验1: 分布式无源雷达成像。系统仿真参数与文献[15]保持一致。另外,设置回波通道的频率采样点数为10,接收回波SNR=10 dB。图4给出了3个目标示例的原始成像模型。针对此类型的扩展目标,图5 (a)~图5 (d)是分别采用MF、SBL、文献[13]和ET-BCS方法的成像结果。可以看出MF方法的成像结果最差,这是由于空间谱的填充是稀疏且非均匀造成的。另外,传统CS稀疏重构方法(SBL)的成像效果也较差,并且存在较多“虚像”,这是由于目标稀疏性较弱所导致。文献[13]和ET-BCS方法由于利用了扩展目标的结构信息,因而均能获得较好的成像结果,如图5 (c)、图5 (d)所示。然而,通过对比箭头所指区域,能够看出本文方法在重构扩展目标空间位置信息时具有更高的准确性,这是因为ET-BCS是文献[13]方法的推广,具有更强的适用性。 图4扩展目标成像模型 (a)MF (b)SBL (c)文献[13]方法 (d)ET-BCS图5ET-BCS与其他方法的无源成像结果对比 实验2: ISAR成像。仿真使用的目标模型如图6 (a)所示,是由3DMAX软件建模得到。其中舰船长度为28 m,宽度约为3.2 m,成像目标与雷达系统的几何空间构型如图6 (b)所示,机载雷达沿X负半轴方向匀速运动,速度为300 m/s,雷达成像时间为2.3 s,t=0时,雷达的初始坐标为(5 268.5 m, 1 284.5 m, 4 266.5 m)。另外,雷达发射信号的载频为5 GHz,带宽为1 GHz,脉冲持续时间为100 μs,脉冲总数为256,脉内采样点数为128,其他参数见文献[16]。接着将雷达系统参数、成像空间构型和目标参数模型代入GRECO图形电磁仿真软件,即能得到相应的模拟回波数据。本文在进行ISAR成像之前事先进行了平动补偿处理,这里选取前32个脉冲和前32个脉内采样点作为基础数据,并额外加入高斯噪声使得最终的接收回波满足SNR=5 dB。 (a)3DMAX舰船建模 (b)成像构型图63DMAX舰船模型及与成像系统空间构型 图7(a)~(h)依次是RD,FOCUSS,SBL,YALL1,SL0,TVAL3,文献[13]和ET-BCS方法的成像结果,其中图中的线框表示舰船的基本轮廓。可以看出RD方法的分辨率最低,这是由于回波数据的欠采样特性引起;另外,FOCUSS,SBL,YALL1,SL0等传统CS方法的成像结果中存在较多虚像,这是由于舰船目标的稀疏性较差所导致。TVAL3方法虽然基于TV正则化技术,可以较好地保护图像的边缘特性,但该方法没有进一步利用目标稀疏先验信息,因此成像结果也不理想。图7(g)、图7(h)展示了文献[13]和ET-BCS方法的成像结果对比。由于这两种方法均额外利用了扩展目标的结构信息,故成像质量相比其他方法要好很多,并且几乎不存在任何虚像。但是相比而言,ET-BCS在舰船目标的轮廓、边缘等信息提取上具有更多的优势,可以提取到一些额外的强散射点,见图7(g)~(h)中箭头的指示区域。这是因为ET-BCS是文献[13]方法的推广,它考虑了更多的目标连续模式,并且利用VB求解方法要比Gibbs抽样方法取得更高的参数提取精度。 (a)RD (b)FOCUSS (c)SBL (d)YALL1 (e)SL0 (f)TVAL3 (g)文献[13]方法 (h)ET-BCS图7ET-BCS与其他方法的ISAR成像结果对比 大型刚体目标的距离维及方位维通常存在扩展特性,造成成像场景的散射点较多且呈区域性分布,此时目标空间域的稀疏性相对较差,因此会导致传统稀疏重构方法的成像性能受限。据此,本文在传统目标稀疏先验基础上,进一步考虑利用扩展目标图像的结构信息,在贝叶斯框架下基于目标图像的连续性分布特征,提出了基于扩展目标先验分布的贝叶斯压缩感知成像技术。仿真验证了所提方法的有效性,并展示在相同系统配置模式下相比传统稀疏重构方法的优势。 [1]LIU Hongchao, JIU Bo, LIU Hongwei, et al. Superresolution ISAR Imaging Based on Sparse Bayesian Learning[J]. IEEE Trans on Geoscience and Remote Sensing, 2014, 52(8):5005-5013. [2]YANG Lei, ZHOU Jianxiong, HU Lei, et al. A Perturbation-Based Approach for Compressed Sensing Radar Imaging[J]. IEEE Antennas and Wireless Propagation Letters, 2017, 16(1):87-90. [3]XU Gang, XING Mengdao, XIA Xianggen, et al. High-Resolution Inverse Synthetic Aperture Radar Imaging and Scaling with Sparse Aperture[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8(8):4010-4027. [4]华煜明,赵华,郭军海. 高速自旋目标ISAR成像的代数重构方法[J]. 雷达科学与技术, 2016, 14(2):134-139. HUA Yuming, ZHAO Hua, GUO Junhai. Algebraic Iterative Imaging Method for Rapidly Rotating Target in ISAR[J]. Radar Science and Technology, 2016, 14(2):134-139.(in Chinese) [5]QIU Wei, ZHAO Hongzhong, ZHOU Jianxiong, et al. High-Resolution Fully Polarimetric ISAR Imaging Based on Compressive Sensing[J]. IEEE Trans on Geoscience and Remote Sensing, 2014, 52(10):6119-6131. [6]WU Q, ZHANG Y D, AHMAD F. Compressive-Sensing-Based High Resolution Polarimetric Through-the-Wall Radar Imaging Exploiting Target Characteristics[J]. IEEE Antennas and Wireless Propagation Letters, 2015, 14(1):1043-1047. [7]DE FREITAS A, DE VILLIERS J P, NEL W A J, et al. Joint Inference of Dominant Scatterer Locations and Motion Parameters of an Extended Target in High Range-Resolution Radar[J]. IET Radar, Sonar & Navigation, 2015, 9(5):519-530. [8]WU Q, ZHANG Y D, AMIN M G, et al. Multi-Task Bayesian Compressive Sensing Exploiting Intra-Task Dependency[J]. IEEE Signal Processing Letters, 2015, 22(4):430-434. [9]TZIKAS D G, LIKAS A C, GALATSANOS N P, et al. The Variational Approximation for Bayesian Inference[J]. IEEE Signal Processing Magazine, 2008, 25(6):131-146. [10]BEVACQUA M, CROCCO L, DONATO L D, et al. Exploiting Sparsity and Field Conditioning in Subsurface Microwave Imaging of Nonweak Buried Targets[J]. Radio Science, 2016, 51(4):301-310. [11]HERMAN M A, STROHMER T. High-Resolution Radar via Compressed Sensing[J]. IEEE Trans on Signal Processing, 2009, 57(6):2275-2284. [12]WANGT,LUX,YUX,etal.AFastandAccurateSparseContinuousSignalReconstructionbyHomotopyDCDwithNon-ConvexRegularization[J].Sensors, 2014, 14 (4):5929-5951. [13]WANGLu,ZHAOLifan,BIGuoan,etal.EnhancedISARImagingbyExploitingtheContinuityoftheTargetScene[J].IEEETransonGeoscienceandRemoteSensing, 2014, 52(9):5736-5750. [14]WANGTianyun,LIUChangchang,DINGLi,etal.SparseImagingUsingImprovedOMPTechniqueinFD-MIMORadarforTargetofftheGrid[C]∥2013Asia-PacificConferenceonSyntheticApertureRadar,Tsukuba,Japan:IEEE, 2013:434-437. [15]WANGTiayun,YUXiaofei,CHENWeidong,etal.High-ResolutionImagingofPassiveRadarBasedon SparseBayesianLearning[J].JournalofElectronics&InformationTechnology, 2015, 37(5):1023-1030. [16]尹治平. 分数阶Fourier变换在逆合成孔径雷达成像处理中的应用[D]. 合肥:中国科学技术大学, 2008.

3 仿真实验与分析
4 结束语
猜你喜欢
客联(2021年9期)2021-11-07法律方法(2021年4期)2021-03-16法律方法(2021年4期)2021-03-16火力与指挥控制(2021年1期)2021-02-03海外文摘·艺术(2020年22期)2020-11-18数学大世界(2020年19期)2020-08-05矿山测量(2020年2期)2020-05-17智富时代(2018年11期)2018-01-15智富时代(2018年11期)2018-01-15计算机与数字工程(2017年7期)2017-08-01