基于MotoSim EG的安川机器人虚拟示教仿真
2017-03-04 06:08钱玉剑张爱红陈星星
无锡职业技术学院学报 2017年1期
钱玉剑 张爱红 陈星星
基于MotoSim EG的安川机器人虚拟示教仿真
钱玉剑 张爱红 陈星星
近年来,随着人工成本逐年增高,机器人在工业中的应用越来越广泛,诸如:喷涂、码垛、搬运、包装、焊接、装配等,普遍采用示教编程方法[1]。随着虚拟现实技术的快速发展,计算机仿真已成为网络制造的重要手段。国外知名机器人厂商,诸如ABB、FANUC、YASKAWA、KUKA等都推出了Windows 平台上使用 3D 技术开发的机器人仿真软件。文中以MOTOMAN机器人的零件码垛搬运为例,给出了应用MotoSim EG软件实现安川机器人虚拟示教的过程。在机器人环境物建模的基础上,实现了对机器人工件搬运操作的示教编程,基于此生成了INFORM III程序格式的代码并下载至机器人控制器,最终经过机器人再现操作验证了虚拟仿真建模的精度与虚拟示教的可行性。
1 机器人及其环境物建模
机器人本体、安装地面等模型是MotoSim EG软件自带的,可以直接导入,因此构建工作台与工件等环境物模型是离线仿真编程的关键。值得注意的是建立的模型需与实际环境物的外形尺寸、安装位置等完全一致,否则会因精度偏差等问题而不能进行工件的准确移位。本次建模的对象为MOTOMAN HP20机器人、带夹具的工件以及六工位缓冲台等,建模实物对象如图1所示。

图1 安川机器人与缓冲工作台实物
1.1 建立仿真工作单元
在机器人及其环境物建模前,需先新建一个虚拟仿真的工作单元,工作单元是机器人与环境物模型构建的基础。工作单元按照下述步骤建立:
(1)单击{开始}菜单→{MotoSim EG}→{File}→{New Cel Project}选择所要保存的计算机路径;(2)弹出New Cel对话框,新建一项目,文件类型是Cel File(*.cel)。单元文件、参数数据、模型数据、作业数据等均存放在该文件夹内。
1.2 导入机器人模型

1.3 添加地面

1.4 显示机器人的法兰端
默认情况下,在新建的仿真单元中不会显示机器人法兰端的坐标系,需要通过用户设置,具体操作步骤如下:单击菜单{Setting}→{Options}→{Graphic}→{Show},分别在Resolution中填入32~256之间的数字,在Blurrin中填入1~6之间的数字;点击Execute,在Duratio中填入0.01~9.99之间的数字;接着设置Frame Lenght,为了能够清楚地显示坐标系,在其中填入一个较大的数字200。经过以上操作构建机器人仿真工作单元如图2所示。
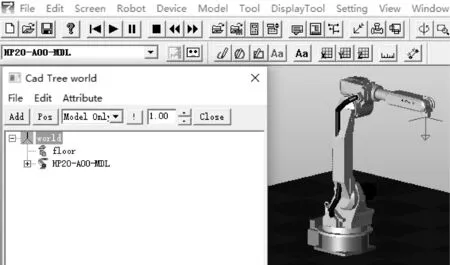
图2 机器人仿真工作单元的创建
1.5 构建周围环境物模型
1.5.1 底座的建立
机器人与地面之间有一个底座,需经测量得到外形尺寸和位置关系后再建立模型。单击树形图中的{world}→{Add},弹出创建模型对话框,取名为{base},单击确定后在树形图中出现base节点。双击base节点,弹出“Add Parts”的数据编辑对话框。在Add Parts处下拉菜单选择{BOX}→{Add}弹出{BOX Edit}的对话框,设置底座的尺寸,单击{Color}可以选择底座的颜色。
1.5.2 工作台的建立
1.5.3 工件的建立
根据实际中工件尺寸创建工件,依次点击{world}→{stand}→{Add},给工件1取名为workpiece1,在workpiece1的数据编辑对话框中添加圆柱(CYLINDER),尺寸数据设置为U100,L100,Height100,位置坐标为X1234,Y-500,Z841。根据工作环境的要求共需创建6个尺寸形状相同的圆柱形工件,完成工件1的创建后,工件2~工件6的模型尺寸不变,仅需更改Y方向的位置,其构建过程限于篇幅,不再赘述。创建完成的工作环境模型如图3所示。
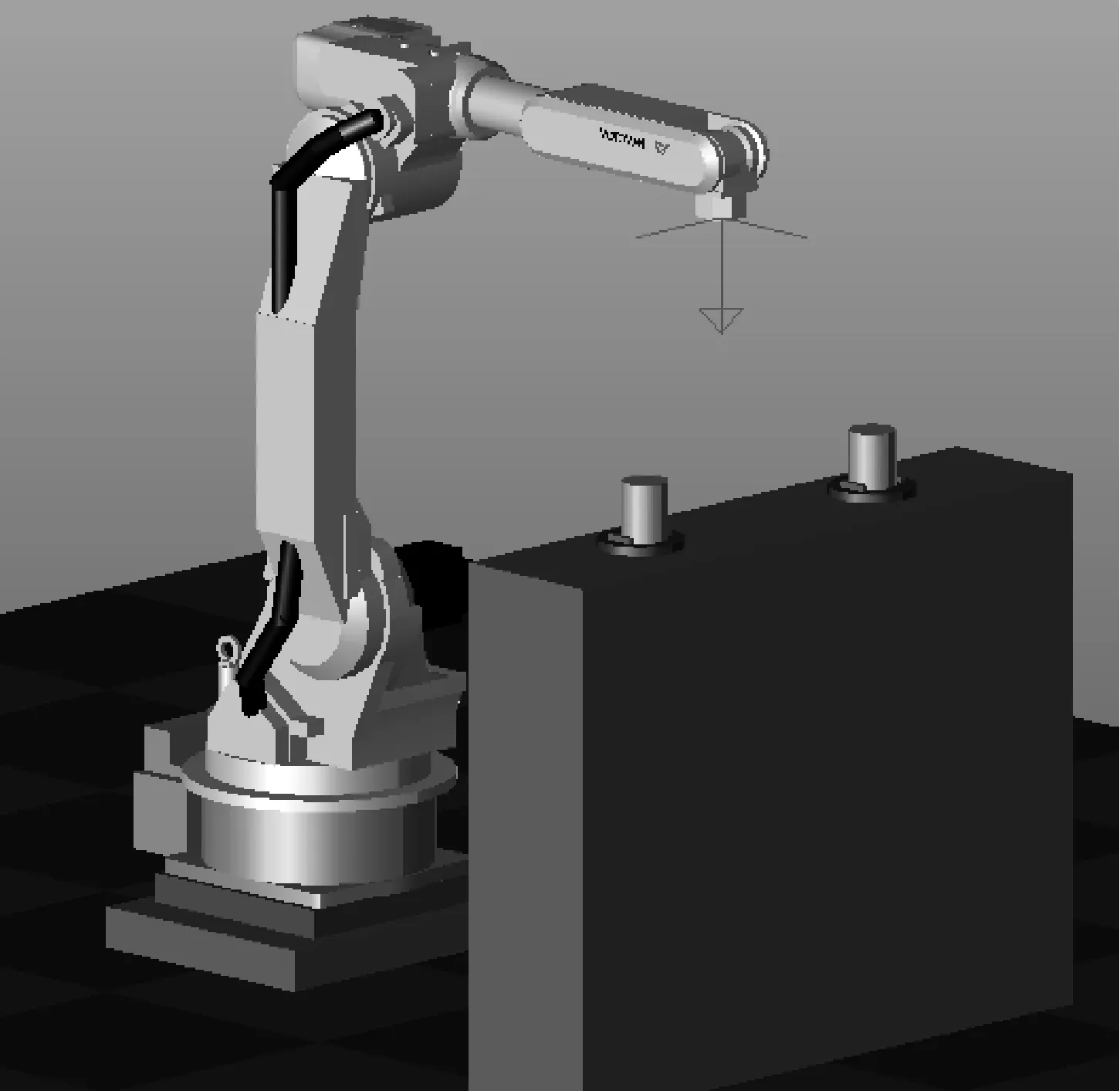
图3 包含工作台与工件的仿真工作单元
1.5.4 创建机器人手爪
MotoSim EG软件自带的工具模型较少,仅包含用于弧焊的焊枪模型,一般情况下难以满足实际工作的需要,因此用户需根据实际应用进行工具建模,本应用创建用于工件取放的气动手爪。在手爪部分建模的过程中,先应将光标定位到机器人树形图的刀尖点(HP20-A00-MDL_tcp)处,然后再构建机器人手爪模型grasp。
1.5.5 调整TCP工具中心点的位置
机器人的TCP点是机器人法兰盘端面中心的一点,工具坐标系原点的缺省位置就在法兰盘端面中心点。为了实际操作的方便,需要重新调整机器人的TCP点,将其移至手爪前端面的中心,如图4所示。具体操作如下:点击菜单{Robot}→{Data Setting}→{Tool Data…}出现工具编辑对话框后,修改工具坐标偏置值。但调整时又发现:机器人手爪模型会随着TCP点移动而移动,为此需将光标定位到Cad树形图中手爪模型处对其位置再作适当调整,经重新设定后满足要求。
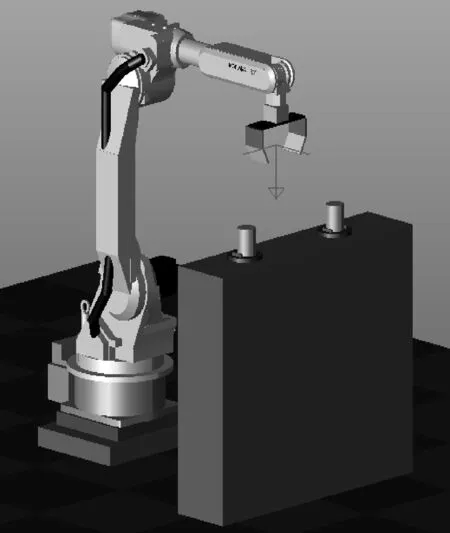
图4 调整TCP后的机器人及工作台
2 机器人虚拟示教与再现
2.1 虚拟示教编程

工件取放的应用实例由7个程序动作歩构成,其中第1歩的开始位置与第7歩的结束位置为同一位置,例程如下:
NOP
MOVL V=200.0 ‘第1步
MOVL V=70.0 ‘第2步
DOUT OT#(17) OFF ‘抓取工件
DOUT OT#(18) ON
TIMER T=1.0 ‘延时1秒
…
DOUT OT#(17) ON ‘放置工件
DOUT OT#(18) OFF
…
MOVL V=200.0 ‘第7步
END2.2 程序导入
经MotoSim EG软件生成的示教程序经虚拟仿真验证无误后方可导入到现场机器人控制器。由于虚拟示教生成的程序存于计算机上,需先在计算机上找到创建的作业文件(.JBI),再利用读卡器将程序复制到CF卡内。应用CF卡将程序导入机器人控制器的具体操作详见文献[4]。
2.3 程序调试运行
程序导入至机器人控制器后应选择在“示教”模式下进行调试运行。机器人动作期间需观察抓取点与放置点是否准确,若发现位置存在偏差需进行微调。程序逐段调试无误后将模式切换至“再现”,伺服上电后按启动键,程序将自动运行。在运行过程中若发生意外情况需立即按下急停按钮以停止机器人的动作,直至故障排除后再重新启动。
3 结论
应用MotoSim EG软件成功对无锡职业技术学院智能工厂MOTOMAN机器人及其环境物进行了虚拟示教仿真,应用实践表明:虚拟示教仿真可以减少机器人的停机时间,为机器人系统调试人员提供了一个较好的实验平台,同时也为机器人自动生产线方案设计等提供了一个新思路。
[1] 张爱红,张秋菊.机器人示教编程方法[J].组合机床与自动化加工技术,2003(4):47-49.
[2] 陕军峰.机器人码垛离线仿真与远程控制技术研究[J]. 组合机床与自动化加工技术,2011(4):70-73.
[3] 姚贵昌.基于Roboguide平台的FANUC机器人虚拟现实技术在工业生产中的应用[J].机械工程师,2014(1):60-62.
[4] 张爱红.工业机器人应用与编程技术[M].北京:电子工业出版社,2015:128-136.
责任编辑 陈桂梅
(无锡职业技术学院 控制技术学院, 江苏 无锡 214121)
工业机器人的示教分为在线示教与虚拟示教两种,文中给出了应用MotoSim EG软件实现安川工业机器人的虚拟示教过程。在机器人及其环境物建模的基础上,完成了机器人工件搬运的示教与编程,进而生成了INFORM III格式的机器人程序代码,通过将程序下载至机器人控制器,验证了虚拟仿真建模的精度与示教程序的可行性。实践应用表明:应用仿真软件能达到预期效果,与现场操作相比具有直观安全、成本低、效率高等优点。
工业机器人; 虚拟示教; 仿真建模
Yaskawa Robot Virtual Teaching Simulation Based on MotoSim EG
QIANYujian,ZHANGAihong,CHENXingxing
(School of Control Technology, Wuxi Institute of Technology,Wuxi 214121,China)
Industrial robot teaching is divided into two kinds of style. They are online teaching and virtual teaching. The virtual teaching on Yaskawa industrial robot with MotoSim EG is provided in this article. Based on the surroundings of the robot, virtual teaching and programming are handling robot working pieces. Then robot codes with INFORM III format are generated and downloaded by the robot controller. This is used to verify the accuracy of the virtual modeling and evaluate the feasibility of the process. Practice shows that the application of simulation software can achieve the Expected results. It is more intuitive, safer, cheaper and higher efficient than site operation.
industrial robot; virtual teaching; simulation modeling
10.13750/j.cnki.issn.1671-7880.2017.01.013
2016-10-07
2016年江苏省高等学校大学生创新创业训练计划项目“工业机器人虚拟仿真与离线编程”(201610848004Y)
张爱红(1971— ),男,江苏盐城人,教授,研究方向:机电一体化技术,智能制造新技术。
TP 242
A
1671-7880(2017)01-0047-03
猜你喜欢
少先队活动(2021年2期)2021-03-29
汽车维修与保养(2021年8期)2021-02-16
学生天地(2020年17期)2020-08-25
数学大王·低年级(2020年3期)2020-03-12
网络安全和信息化(2020年1期)2020-01-15
装备制造技术(2019年6期)2019-08-15
电子制作(2018年24期)2019-01-03
中学科技(2018年12期)2018-12-19
中学科技(2018年10期)2018-12-18
荣誉杂志(2017年7期)2017-08-23