平滑去噪分块K-means算法的机器人视觉图像处理
2017-01-09 03:00:31马吴涵王欣宇哈尔滨工程大学自动化学院哈尔滨150001
上海船舶运输科学研究所学报 2016年4期
马吴涵, 王欣宇(哈尔滨工程大学 自动化学院, 哈尔滨 150001)
平滑去噪分块K-means算法的机器人视觉图像处理
马吴涵, 王欣宇
(哈尔滨工程大学 自动化学院, 哈尔滨 150001)
针对机器人视觉目标图像信噪比低、背景噪声干扰大的特点,采用马尔科夫随机场(Markov Random Field, MRF)模型的平滑去噪方法对图像进行预处理。在此基础上,采用K-means聚类算法对图像进行聚类,将具有不同特征的目标区域分类,为进一步实现目标识别和跟踪提供基础。同时,为进一步克服移动机器人导航过程中视觉处理速度慢的缺陷,对图像进行分块划分,提取每个图像块的均值、方差和最大值作为特征值,从而提高算法的处理速度。
机器人视觉; 平滑去噪; K-means算法; 分块划分
0 引 言
机器人按照有无自主视觉系统可分为可视机器人和非可视机器人,随着科技的进步、人工智能的发展及实际生产生活需求的提高,机器人视觉系统成为机器人研究领域中最新和最热门的课题之一[1]。可视化机器人的特点是提高生产的柔性和自动化程度,可在一些不适合人工作业的环境下或人工视觉难以满足要求的场合提高生产效率、解决人工疲劳造成的质量问题。
移动机器人视觉图像处理研究主要集中在目标识别、定位及跟踪等方面[2],其中目标识别是机器人视觉研究的基础,包括目标特征的提取和图像分割。机器人在移动过程中,将摄像头拍摄的视频截取为每一帧图像进行处理,根据图像处理结果并结合相关算法,规划机器人后续的运动轨迹。
由于视觉机器人工作环境复杂,大多数情况下其视觉得到的图像信噪比低、背景噪声干扰较大[3],因此为提高图像检测精度,采用马尔科夫随机场(Markov Random Field, MRF)模型描述图像的原始纹理特征[4],并对图像进行平滑噪声处理。同时,采用K-means算法对图像中不同特征目标进行聚类并完成图像分割,从而为进一步实现目标识别和跟踪提供基础[5]。
1 基于MRF模型的平滑去噪

(1)
(2)
根据式(2),可将二阶邻域系统的8个β值分成两两相等的4组参数组。将属于同一组的像素值相加,可得到4行1列的矩阵[5],该矩阵可表示为
(3)
(4)
(5)
按照上述过程对目标图像进行平滑去噪,可为后续图像处理提供基础。
2 基于图像分块的K-means聚类
2.1 标准K-means聚类算法
自1967年MACQUEEN[6]首次提出K-means聚类算法以来,由于该算法简单易行、聚类结果较好,受到相关学者的广泛关注,并已应用到工程实践的各个领域中。其核心思想是一个迭代计算过程,在图像矩阵中选取若干个聚类中心,按照特征相似度的计算结果将数据点划分到与其特征最为相似的聚类中心中,数据集划分完毕后,计算出各个划分区域所有数据点的平均值作为新的聚类中心。重复该过程,直到上一代的聚类中心与本代的聚类中心一致或满足一定的精度要求为止,最后的划分结果即为图像的分割结果。

(6)
聚类过程是寻找最佳聚类中心cj,使目标函数J为最小值,对聚类中心求偏导可得
(7)
聚类中心为
(8)
因此,通过标准K-means聚类算法求取每个划分区域像素点的平均值来生成新的聚类中心,不断趋近目标函数的最优值,达到图像的最佳分割结果。K-means聚类算法流程见图2。
2.2 基于图像分块的K-means算法
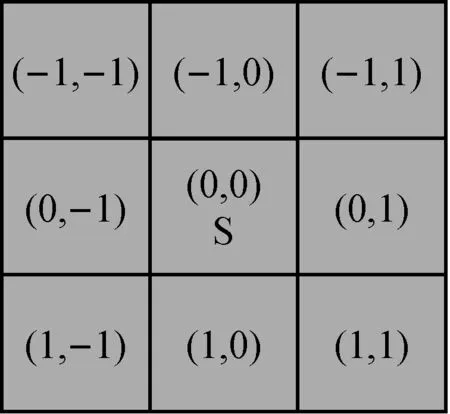
为进一步提高算法的检测速度,采用分块思想的K-means算法(见图3),该算法可减少运算次数、降低计算的复杂度。
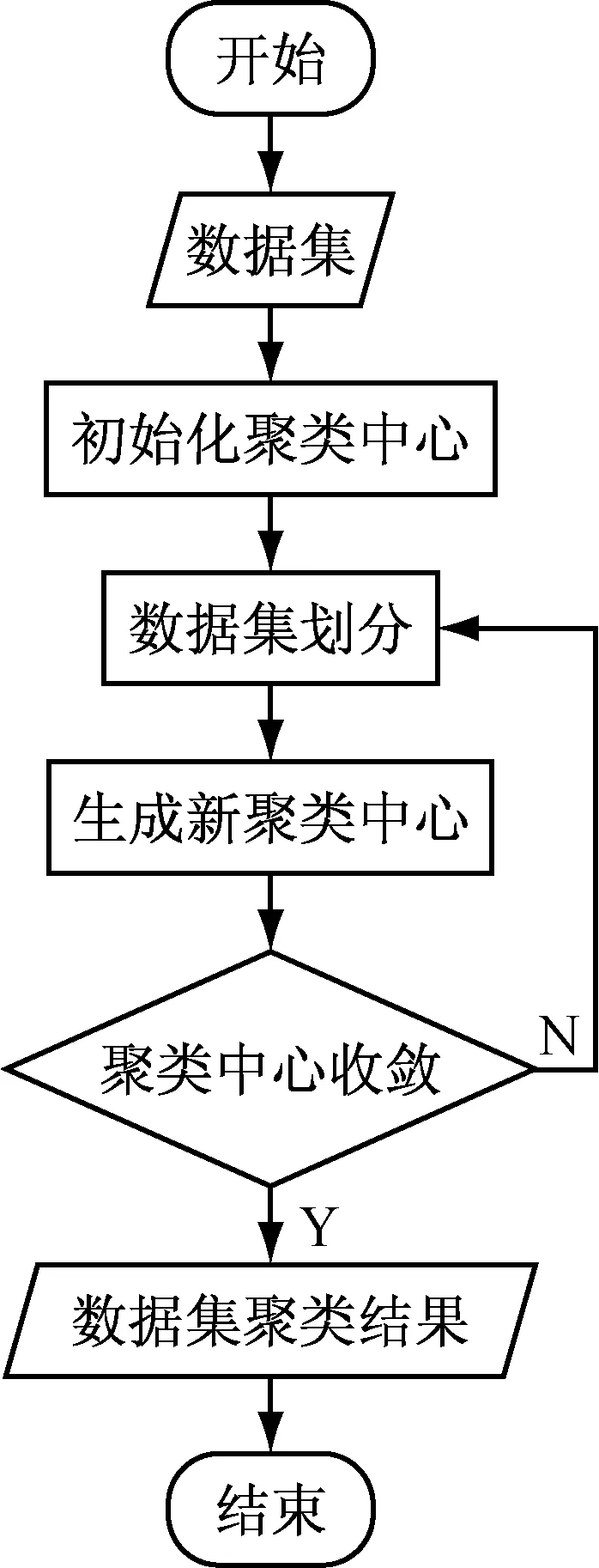
图2 K-means聚类算法流程图
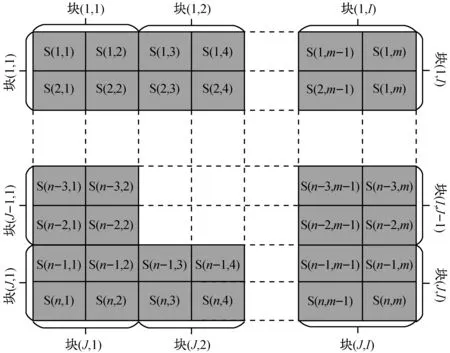
图3 按2×2大小分块矩阵示意图
(9)
(10)
(11)
采用分块后的图像进行处理,可减少计算后续算法迭代次数、降低算法的计算复杂度,从而提高算法的运算效率。
3 试验结果及分析
3.1 Lena图像试验检测及结果
采用MATLAB 2011b软件对带有盐椒噪声的Lena图像[7]进行检测,试验结果见图4~图7。

图4 原始图像
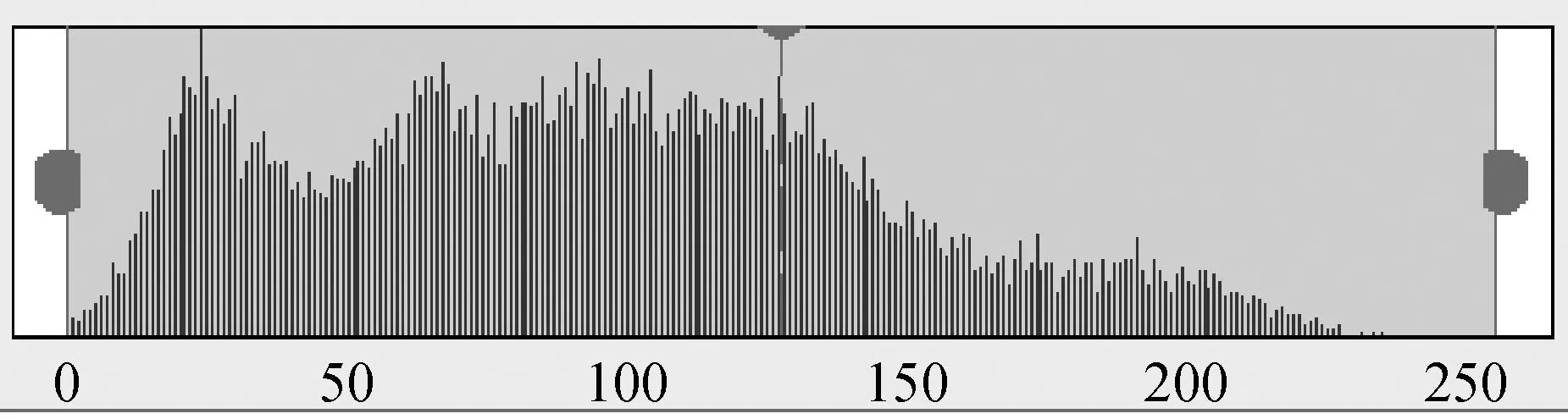
图5 原始图像直方图

图6 平滑去噪后图像

图7 平滑去噪后图像直方图
由试验结果可知,平滑去噪方法能去除原始图像中的部分噪声点,使图像变得更加平滑,有利于后续的检测工作。

图8 K-means聚类算法

图9 K-means块聚类算法

图10 平滑去噪后的K-means块聚类算法

表1 分块和非分块算法的检测时间
由表1可知,分块后的K-means算法可大幅度地提高算法的效率。对比图8和图9可知分块K-means算法可消除部分噪声;对比图9和图10可知平滑去噪后的K-means算法具有较高的检测精度。
3.2 实际图片检测试验
对机器人(以陆地机器人为例)实际工作的环境图像进行检测,得到的结果见图11和图12。

a) 原始道路图像

b) 带有障碍物的图像

a) 原始道路图像检测结果

b) 带有障碍物检测结果
通过对实际道路图像进行检测可知,该检测算法能很好地识别道路、路障及障碍物等,即对不同特征值的数据集合具有较好的分割效果,能很好地识别目标区域,为后续机器人规划合理的动作提供依据,同时为目标实时跟踪提供基础。
4 结 语
以机器人视觉系统为研究对象,采用基于MRF模型的平滑去噪对图像进行预处理,降低噪声对检测结果的影响。在此基础上,采用分块的K-means算法对图像进行特征提取和目标分割,以便于视觉机器人合理规划后续动作。由Lena图像试验和实际图像试验可知,分块后的K-means算法可有效减少迭代次数、降低计算的复杂度、减少运行时间、提高运行效率和达到一定的去噪效果。同时,在平滑去噪的基础上,该算法可较为准确地得到不同类别的目标区域,具有较高的检测精度,可为后续目标实时跟踪提供基础。
[1] 赵贺. 基于机器人视觉图像的路径规划算法研究[D]. 合肥:合肥工业大学, 2010.
[2] 杨晶东,杨敬辉, 洪炳镕. 移动机器人视觉图像特征提取与匹配算法[J]. 计算机应用研究, 2009, 26(9):3526-3529.
[3] 韩宝玲, 罗庆生. 机器人视觉目标数字图像实时处理及分割[J]. 图学学报, 2006, 27(5):75-79.
[4] WANG X M, LIU G Y, LI L, et al. A Novel Quantum-Inspired Algorithm for Edge Detection of Sonar Image[C]. Proceedings of the 33rd Chinese Control Conference, CCC ,2014:4836-4841.
[5] YE X F, ZHANG Z H , PETER X,et al.Sonar Image Segmentation Based on GMRF and Level-Set Models[J]. Ocean Engineering, 2010, 37(10): 891-901.
[6] MACQUEEN J. Some Methods for Classification and Analysis of MultiVariate Observations[C]. Berkeley Symposium on Mathematical Statistics and Probability,1967:281-297.
[7] 关新平, 赵立兴, 唐英干. 图像去噪混合滤波方法[J].中国图象图形学报, 2005, 10(3):332-337.
A Robot Vision Image Processing Method Based on Smoothing and Segment K-means Algorithm
MAWuhan,WANGXinyu
(College of Automation, Harbin Engineering University, Harbin 150001, China)
The MRF(Markov Random Field)-based smoothing is introduced into the pre-processing of robot vision target images which typically have strong background noise and low signal to noise ratio. The segmentation of the pre-processed image is performed by means of the K-means clustering algorithm, which prepares the image for target recognition and tracking. Besides, in order to accelerate the visual processing speed during mobile robot navigation, the image is divided into sections, and the variance and the maximum of each image section are extracted as the features for k-means clustering. The experiments with standard images and actual images are carried out, which prove that the algorithm has better recognition ability, higher detection accuracy and faster detection speed.
robot vision; smoothing; K-means algorithm; dividing
2016-09-15
马吴涵(1996—),女,浙江杭州人,主要从事电气自动化研究。
1674-5949(2016)04-0055-05
TP242.6
A
猜你喜欢
山东农业工程学院学报(2020年12期)2020-03-19 01:58:44
电子制作(2018年18期)2018-11-14 01:48:20
电子测试(2017年15期)2017-12-18 07:19:27
中国公共安全(2017年8期)2017-10-13 08:12:21
中国公共安全(2017年8期)2017-10-13 08:12:20
湖州师范学院学报(2016年2期)2016-08-21 13:50:52
山西大同大学学报(自然科学版)(2016年6期)2016-01-30 08:29:19
智能系统学报(2015年4期)2015-12-27 09:38:39
地理与地理信息科学(2015年4期)2015-10-13 08:29:16
电子设计工程(2015年6期)2015-02-27 12:04:53