基于模糊PID的船舶电站负荷分配控制算法
2017-01-09 02:58:02王宏星上海船舶运输科学研究所舰船自动化分所上海200135
上海船舶运输科学研究所学报 2016年4期
何 勰, 王宏星(上海船舶运输科学研究所 舰船自动化分所,上海 200135)
基于模糊PID的船舶电站负荷分配控制算法
何 勰, 王宏星
(上海船舶运输科学研究所 舰船自动化分所,上海 200135)
船用设备的多样性导致交流电力系统负载变化频繁且快速,对船舶柴油机电子调速器的控制要求越来越高。对此,电站负荷分配控制器多采用拟合频率及功率偏差并对其进行补偿的方式进行负荷分配。主要研究模糊PID控制算法在负荷分配控制器上的应用,优化调节脉冲有效电平占空比输出,从而提高柴油发电机组的负荷分配控制性能。
船舶柴油机;调速器;模糊PID控制
0 引 言
近年来,随着船舶种类的不断增多,有较多应用电力系统进行动力推进的船型出现。由于船舶电力系统负载容量增大、负载变化率加快,对船舶自动化程度的要求大大提高,对机组性能的稳定性也提出了更高的要求。
现代船舶电站设备具有种类多、负荷高和变化频繁等特点,要求船舶电站负荷分配控制算法能较好地契合各类船用调速器,以达到较优的控制效果,使船舶电力系统稳定运行。
1 船舶发电机组调速器调速原理
调速器能根据实际转速与给定转速之间的偏差对原动机的转速进行调节。当负载在0与额定负载之间变化时,调速器根据负载的变化情况自动调节喷油量,从而维持船舶电力系统的频率在允许的范围内。一般船用发电机组的调速器属于“定速调速器”[1]。为保证多台发电机并联时平稳运行,船舶发电机组一般使用调速特性为“有差特性”的调速器[2]。现有船舶柴油机组使用的电子调速器通常带有“下垂”(Droop)工作模式,即调节柴油机组处于有差特性工作状态。所谓有差特性,是指频率或转速随着输出功率的增加而下降(见图1)。
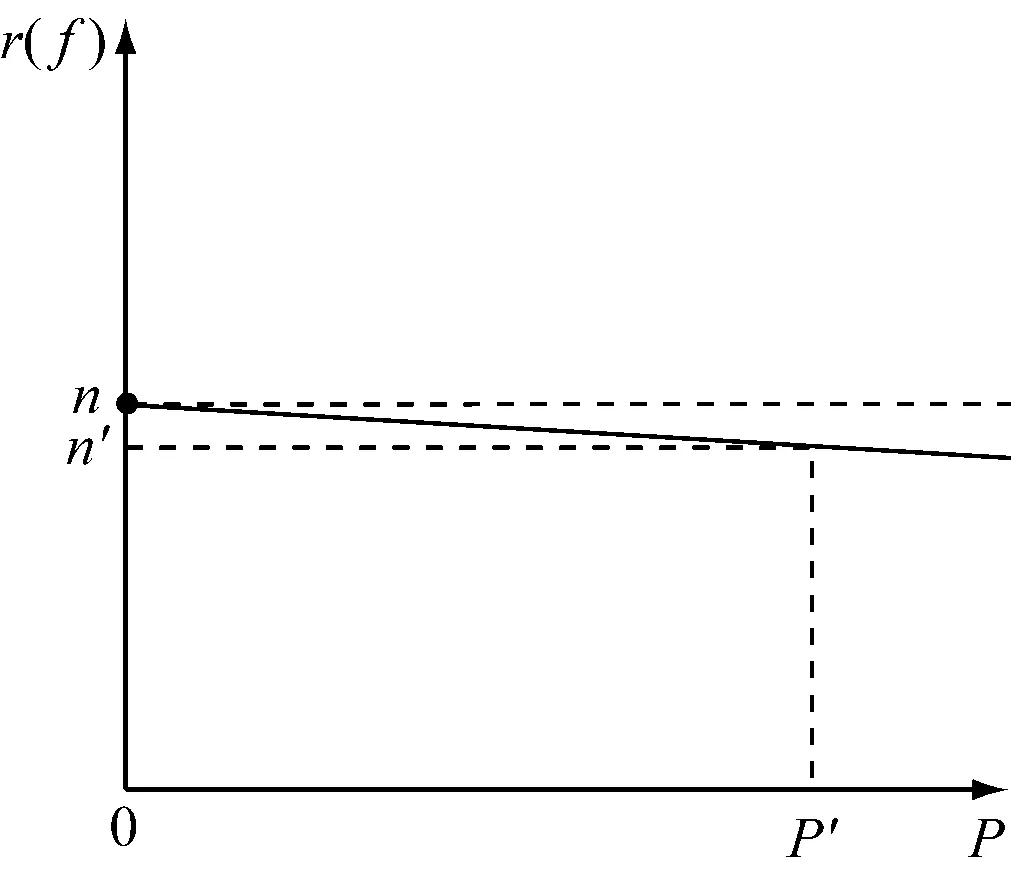
图1 功率-转速下垂特性示意图
调差系数是频率(转速)变化量与功率变化量之比,一般使用调差系数表示有差特性。
(1)
规范规定:Kn≤5%。调差系数小的机组,其频率(转速)随负荷的变化量相对较小;调差系数大的机组,其频率(转速)随负荷的变化量相对较大。
从自动控制理论的角度看,柴油机的转速控制系统属于闭环控制系统[3]。当船舶电力系统的频率发生变化时,调速器依靠固有的调速特性自动调节油门的大小,从而维持发电机的频率在一定的范围内,该调节过程称为“一次调节”。“一次调节”是调速器自发进行的,无需外界控制。但是对于船舶电网而言,发电机的频率必须保持在恒定值。频率作为衡量电能质量的重要参数,与全船电气设备的运行有着密切的关系,电网频率与发电机转速之间有着直接的计算关系,转速的变化直接引起电网频率的变化,因此对柴油发电机组的转速进行控制是保证电力系统频率稳定性的重要手段[4]。工作于下垂特性的机组为保持频率不变,还需进行“二次调节”。
柴油机的发展已有几百年的历史,调速器作为柴油机调速系统的重要组成部分,也得到飞速发展。调速器的发展主要经历了直接作用式机械调速器、间接作用式机械液压调速器、模拟式电子调速器和数字式电子调速器等4个阶段[5]。
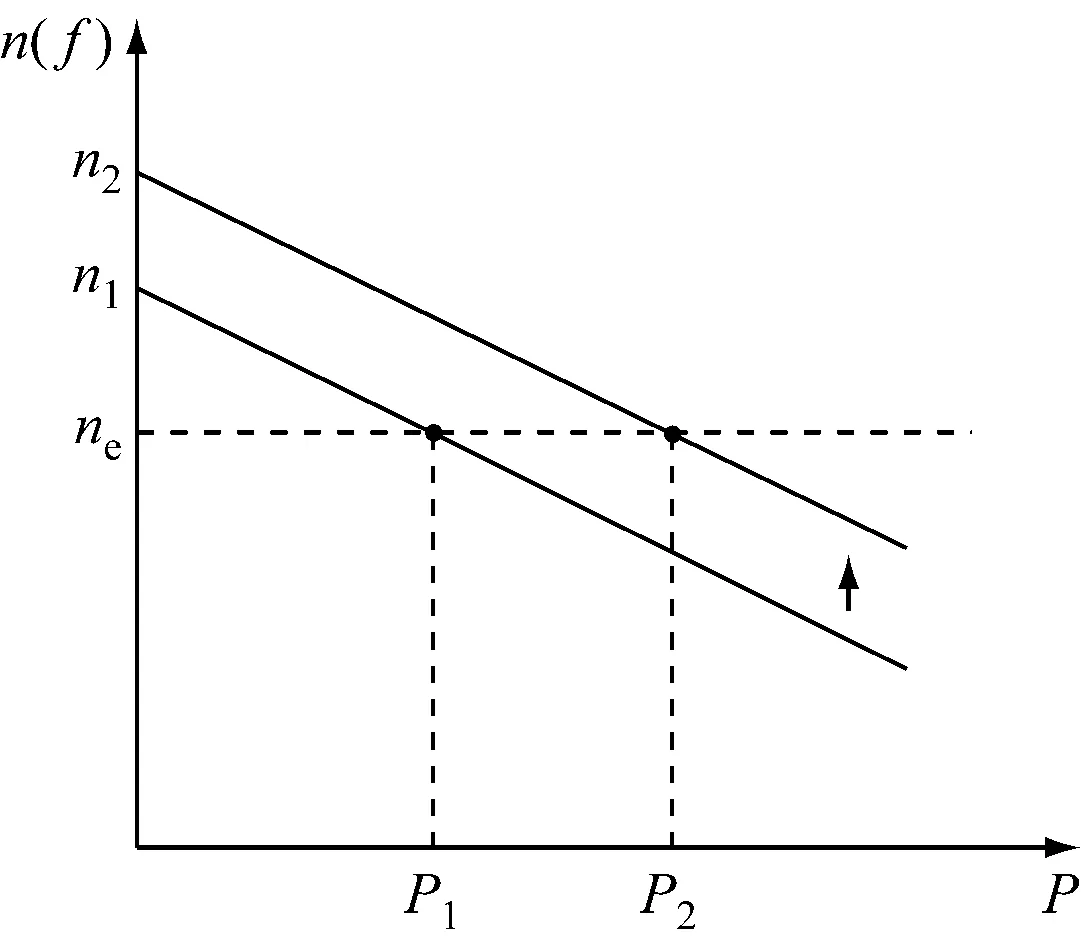
图2 “二次调节”示意图
目前船舶上仍在使用的调速器主要为第二代以后的液压式调速器和电子调速器。传统的液压式调速器上通常配置调速电机和蜗轮减速机构,用于调节飞重弹簧预紧力(改变弹簧预紧力即改变调速器转速的稳定值)。,电子调速器则工作于“下垂”模式下,接收升降速的开关量信号,改变稳定转速值;调速器依据稳定转速值拟合出的下垂特性,根据转速反馈调节油门的大小。 “二次调节”是指改变柴油机调速特性,使“下垂”特性曲线上下平移,以达到在稳定频率的状态下改变负荷大小的目的(见图2)。
一般“二次调节”需在人工控制下或负荷分配控制器控制下进行。船舶电站配电屏上设置有调速旋钮,用于人工远程遥控调速。随着船舶机舱自动化水平不断提高,带有功率管理功能的负荷分配控制器逐渐出现并替代人工操作,实现船舶电站各机组的自动调频、调载。船舶发电机组负荷控制系统框图见图3。
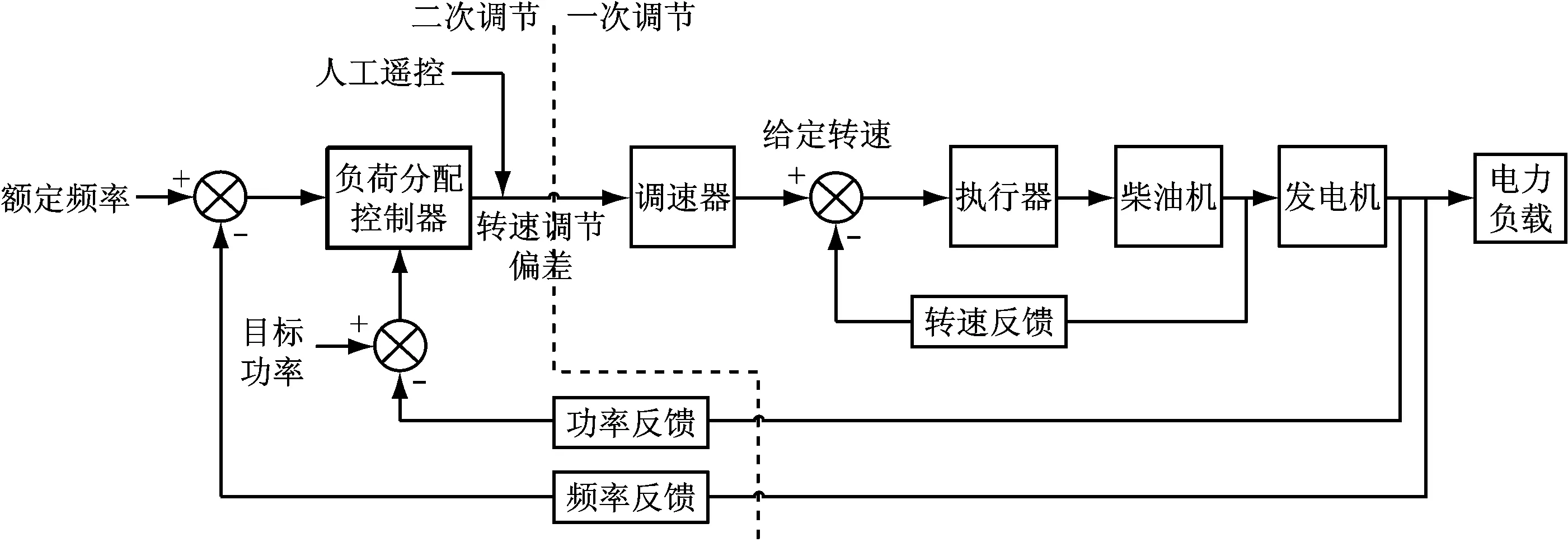
图3 船舶发电机组负荷控制系统框图
2 传统负荷分配控制器控制算法
目前主流的负荷分配控制器较多采用虚有差法作为对机组进行调频调载的控制算法。采用虚有差法进行调节,虽然不同发电机组所配备的调速器的调速特性仍有差别,但其调整的结果可实现电网的频率恒定、功率均分(或按既定比例分配)是无差的。

图4 2台发电机组负荷分配调节过程示意图
以2台发电机组并联运行举例,当原有发电机在网、另1台发电机组投入电网时,2台发电机组负荷分配调节过程示意图见图4。
数字式负荷分配控制器需采集发电机的频率、电压和功率等信息,通过现场总线网络或功率均衡线计算获取所有在网机组的平均功率。当同一电网的机组额定容量相同时,采用平均分配的策略分配功率;当不同容量的机组并联运行时,依据各机组额定容量计算对应的分配比例。负荷分配控制器可计算出负荷分配目标值及本机组功率与该目标值的差值,计算功率偏差值为
(2)
计算频率偏差量为
Δfj=fj-fe
(3)
根据功率偏差和频率偏差,形成融合偏差为
e(k)=kpΔP(k)+kfΔf(k)
(4)
式(4)中:kp和kf分别为功率偏差及频率偏差的权重因子。
负荷分配控制器在调速系统中属于二次调节控制器,其调速特性受一次调节调速器和执行机构的影响较大。在工程实际应用中,由于需适配不同类型的机组和调速器,通常无法通过明确系统的传递函数来设计参数,因此一般使用增量式算法。通过计算输出转速调节偏差量,以加、减开关量脉冲的形式进行调节。调速器依据调节偏差的方向和电平时长,以一定的速率改变设定转速,不断趋近目标转速。采用该方式实现船舶发电机组负荷分配主要有以下2个方面的原因。
(1)通过离散的调节量而不是连续的模拟量直接给定,可避免数字式控制系统死机导致瞬间计算差错,进而引发机组重大故障,给控制设备故障切除、自检及恢复留有时间;
(2)数字式控制系统是一种采样控制系统,在调速器调节响应速率和执行机构响应速率不明确的情况下,仅依靠提高采样速率的方法并不能消除整个调节系统产生的时滞。控制器快速输出调节量与系统时滞之间的矛盾将带来超调和振荡的问题,严重时将影响系统的稳定运行。在多台机组并联运行的船舶电网中提供稳定电力以保证电站整体安全是首要目标,系统设计时考虑稳定性要优先于快速响应性。调速过程和反馈监测在工程实践中必然存在一定的时滞,且这种时滞随设备的不同而不同。为消除由于时滞带来的调节振荡,采取逐次逼近的方法较为实际。
因此,一般调速器与负荷分配控制器间的接口为增量调节信号接口。对于一次调节的调速器来说,相当于在原下垂特性基础上作整体平移,即在既定的功率-转速特性曲线上叠加平移量,有
n(P目标)=n′(P)+u
(5)
式(5)中:u为平移量,由负荷分配控制器根据融合偏差e得出。
但在具体实现时,会受采样调节时滞等因素的限制,为避免超调,会采用小幅趋近的方式,即将一次给定调节量分割为若干个小幅调整,有
(6)
对于数字式负荷分配控制器而言,通常的做法是以“采样-计算-输出”的循环执行调节动作。其被控对象调速器无论是电子调速器、调速电机还是蜗轮减速机构驱动的液压调速器,在接收到有效的加、减速电平信号期间,都可视作以固定速率改变特性曲线(见图5)。
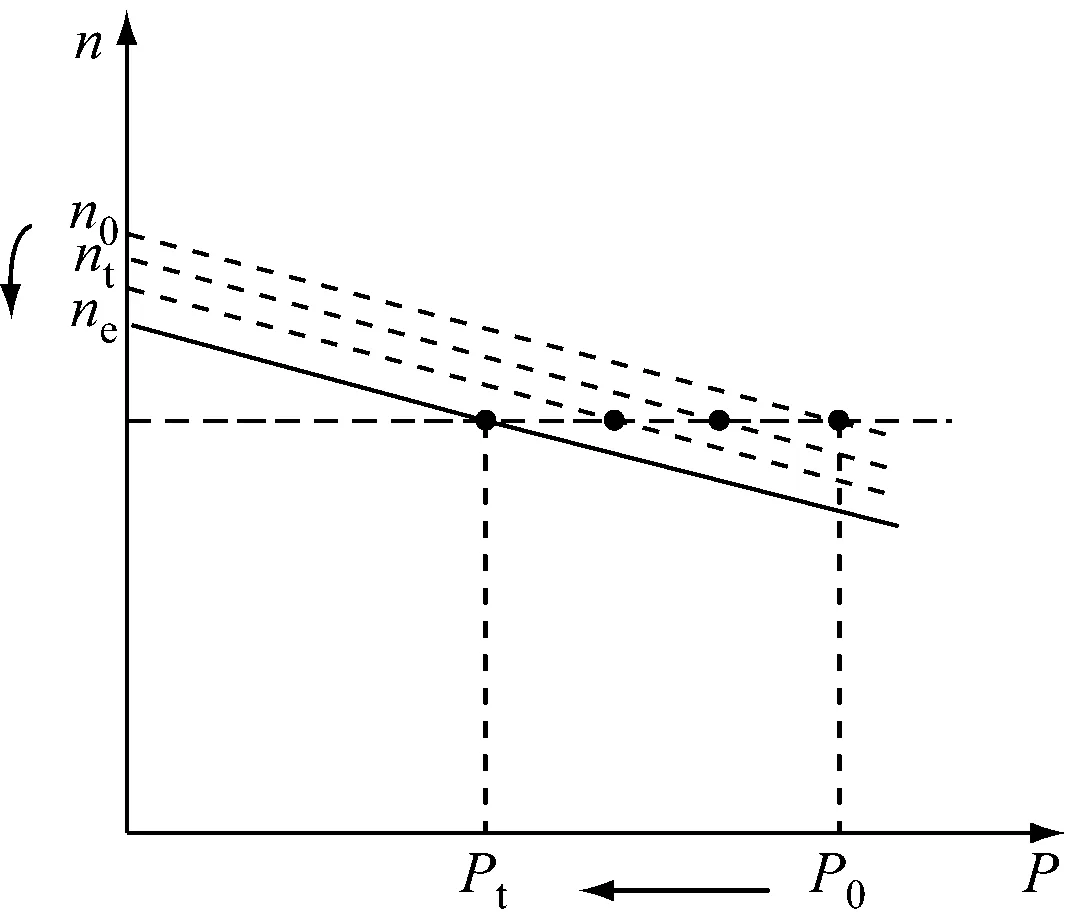
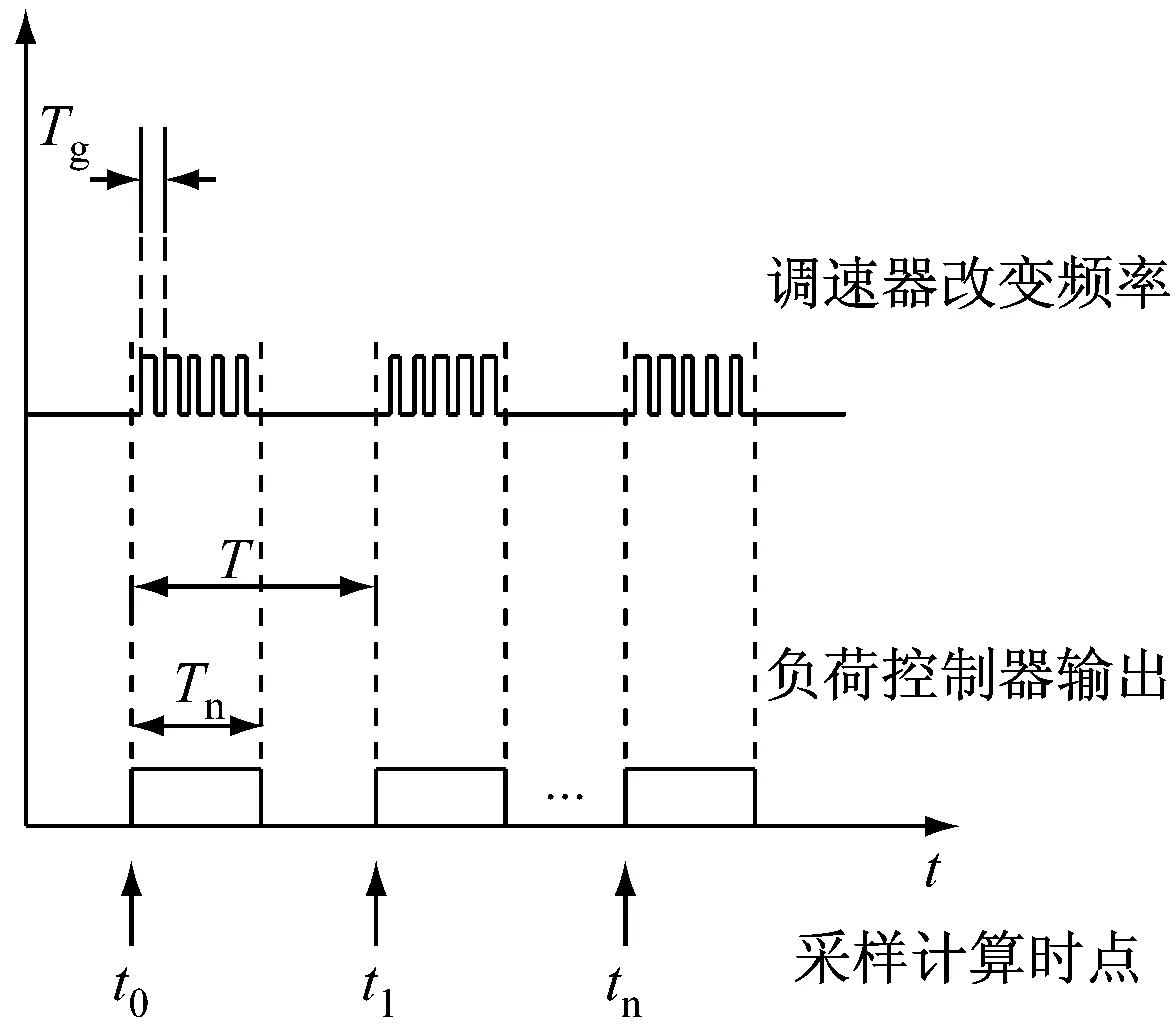
图5 负荷分配调节控制信号输出示意图
由图5可知,对于特定的调速器,改变特性的速率Tg固定,从起始功率P0趋向Pt的速度(即系统的响应性)取决于高电平Th及调节次数n。在排除系统扰动且明确可知Tg与转速N的对应关系的情况下,在t0采样计算时点可得到全过程的调节时长,但实际应用中往往无法做到。从定性的分析来看,负荷控制器在判定出现偏差后保持高电平Th时间越长,负荷调节趋向目标的速度就越快,但时滞会带来超调振荡;调节的次数n越多(即采样时点越多),负荷调节趋向目标的超调就越小,每次估算的调节时间就越精确,也能及时响应系统扰动,但调节的时间会越长。同时,在工程应用中也不允许输出继电器以太高的频率运作,这会影响设备的使用寿命,因此在实际应用时一般对响应性与稳定性进行折中。通常有以下2种控制调节策略。
(1)简单极性判断模式,该模式仅判断调节的方向极性,而调节的时长固定不变,只要存在偏差即以固定的频率发出调节脉冲信号(如图5所示),即T时长和高电平时长的占空比固定,占空比Th可依据现场经验调节。该做法的优点在于逻辑简单,对控制模块硬件的要求较低,可通过人工摸索和经验使二次调节的速率接近于一次调节,同时使继电器动作频率处于可接受的范围内;其缺点在于会产生超调,且一旦系统扰动过大或惯性较大,将无法试凑到合适的调节频率。该调节方法多见于准同步控制器和简单单线构成的船舶电站。
(2)比例-积分-微分(Proportional-Integre-Differential,PID)控制模式,该模式相较于简单极性判断模式的进步之处是能由控制器通过偏差大小依靠PID算法动态计算调节脉冲的有效电平占空比,调节信号离散化处理后的PID表达式为
(7)
实际应用中,由于在电力应用场合下静态波动较大,加入积分环节反而容易引起系统振荡,因此PID调节通常也简化为PD调节,即
U(k)=KPE(k)+Kd[E(k)-E(k-1)]
(8)
由于PID参数整定需长期的经验积累和数据支持,某套参数在应对特定机组特性和调速器特性时可能会有较好的调节效果,但变换了被控对象和适用环境,又需再次依据经验进行调节。负荷分配控制器作为实际的工业产品,调试工程师的经验会对负荷分配控制器的调节效果产生较大影响。现代船舶建造都是模块化组装,建设工期短、项目节点要求高,弱化人为因素、采用先进的控制算法来提升控制设备自适应水平正突显出其必要性。
3 模糊PID控制算法实现
模糊理论是一种研究和处理模糊线性的新型数学方法,通过数学表达式的方式将日常的模糊概念用于控制器当中。模糊控制理论最早由美国自动控制专家查德(L.A.zadeh)于1965年首次提出[6]。

图6 基于模糊逻辑推理的PID控制器控制框图
随着计算机水平不断提高,嵌入式控制器的计算能力也在不断提升,在线修改整定PID参数对于嵌入式控制器的计算和存储能力也可实现。基于模糊逻辑推理的PID控制器是以控制专家整定PID控制器参数的经验和知识为基础,通过对系统过渡过程模式进行在线识别来对PID参数进行自整定的[7]。其控制框图见图6。
针对常规PID调节器,可应用模糊控制理论建立PID参数与偏差绝对值|E|和偏差变化绝对值|EC|之间的二元连续函数,即
(9)
负荷分配控制器可根据|E|和|EC|的不同在线自整定PID参数。根据上述规则设计模糊PID的推理机,首先要设定|E|,|EC|和PID参数Kp,Ki,Kd的模糊控制论域,可将其分为0(Z)、小(S)、中(M)、大(B)等4种不同的模糊语言变量进行描述。设计模糊偏差|E|,|EC|和Kp、Ki、Kd的论域对应的模糊语言变量的隶属函数见图7。
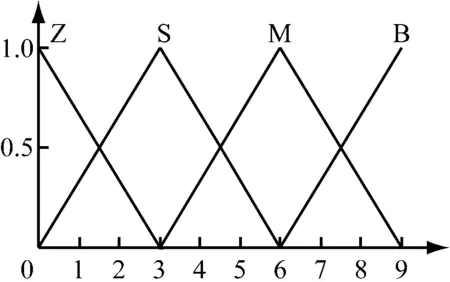
a)偏差|E|隶属函数

b)偏差|EC|隶属函数
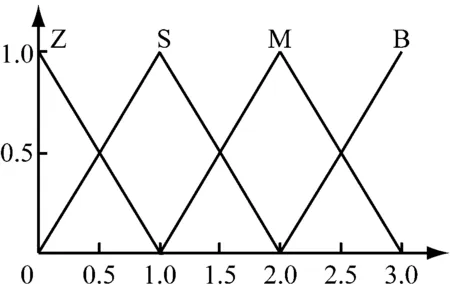
c)Kp,Ki,Kd隶属函数
在负荷分配的控制场景中,有一些PID参数的整定规则可归纳为以下3个方面。
(1)当偏差|E|较大时:为获得较高的响应速率,使机组的负荷尽快趋近,应选取较大的Kp和较小的Kd;同时,为防止出现系统响应出现较大的超调,应限制积分环节,取Kd=0。
(2)当偏差|E|处于中等大小时:为使调节过程具备较小的超调,应选取较小的Kp值,此时Ki值要大小适中,以保证系统的响应速率;同时,要关注调节过程,由于负荷转移不仅取决于某台机组,其他机组的调速过程也会将负荷转移过来或抢走造成负荷偏差瞬间变化,此时Kd的取值会对系统响应产生较大影响,Kd的取值要适度偏小。
(3)当偏差|E|较小时,为使系统有较好的稳定性,Kp和Ki要取得大一些,同时为避免机组在负荷均衡值附近频繁调节出现振荡,并考虑系统的抗干扰性,在|EC|较小时Kd值可取中等大小;在|EC|较大时Kd可取较小值。
依据以上规则设计PID参数的模糊控制规则见表1~表3。
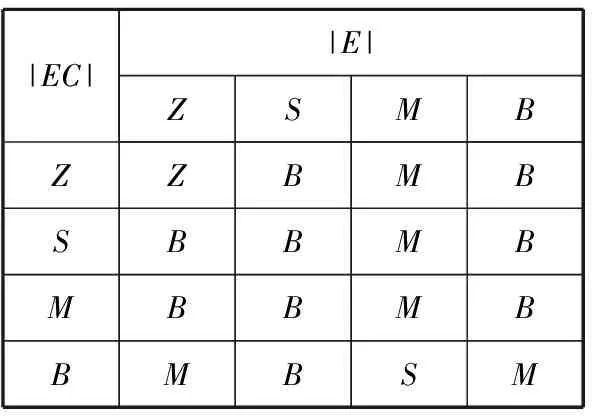
表1 Kp模糊控制规则

表2 Ki模糊控制规则
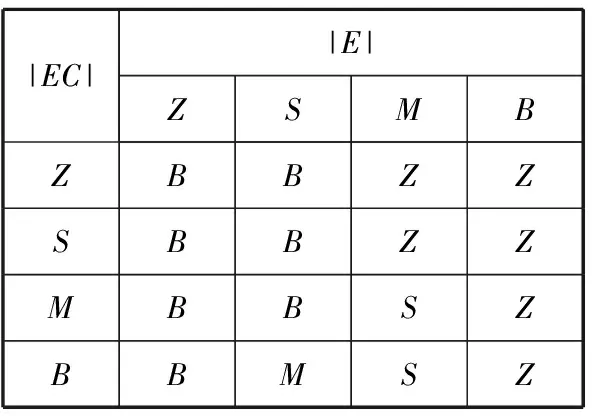
表3 Kd模糊控制规则

图8 模糊计算软件流程图
对于基于嵌入式芯片开发的负荷分配控制器,可通过C语言编程实现上述模糊自整定PID算法。控制器内部的采集电路定时采样被控机组的电量信息,软件按照固定周期计算当前偏差|E|和偏差率|EC|,并依据计算结果根据预设的模糊控制参数将E和EC模糊化,即对照隶属函数将|E|和|EC|变换至模糊的论域中。依照|E|值和|EC|值查找对应的模糊控制表,得到模糊控制量所应对的Kp、Ki和Kd值。最后将PID参数置入PID计算函数中,计算当前的控制增量,由执行电路输出调速脉宽和调速极性。软件流程见图8。
根据模糊PID控制算法重新设计某型负荷分配控制器的分配算法,建立PID参数的模糊控制规则并将其存储于芯片的EEPROM内,由改进算法的某型负荷分配控制器并联控制2台变频器驱动的电动机,以模拟实际船舶发电机组。在试验室进行模拟试验,试验模拟从1台发电机组投入电网到2台发电机组并联运行的负荷平衡过程,并手动施加扰动后观察控制器调节机组恢复负荷平衡的过程。在调试监控上位机上截取的功率调节趋势图对比见图9和图10。
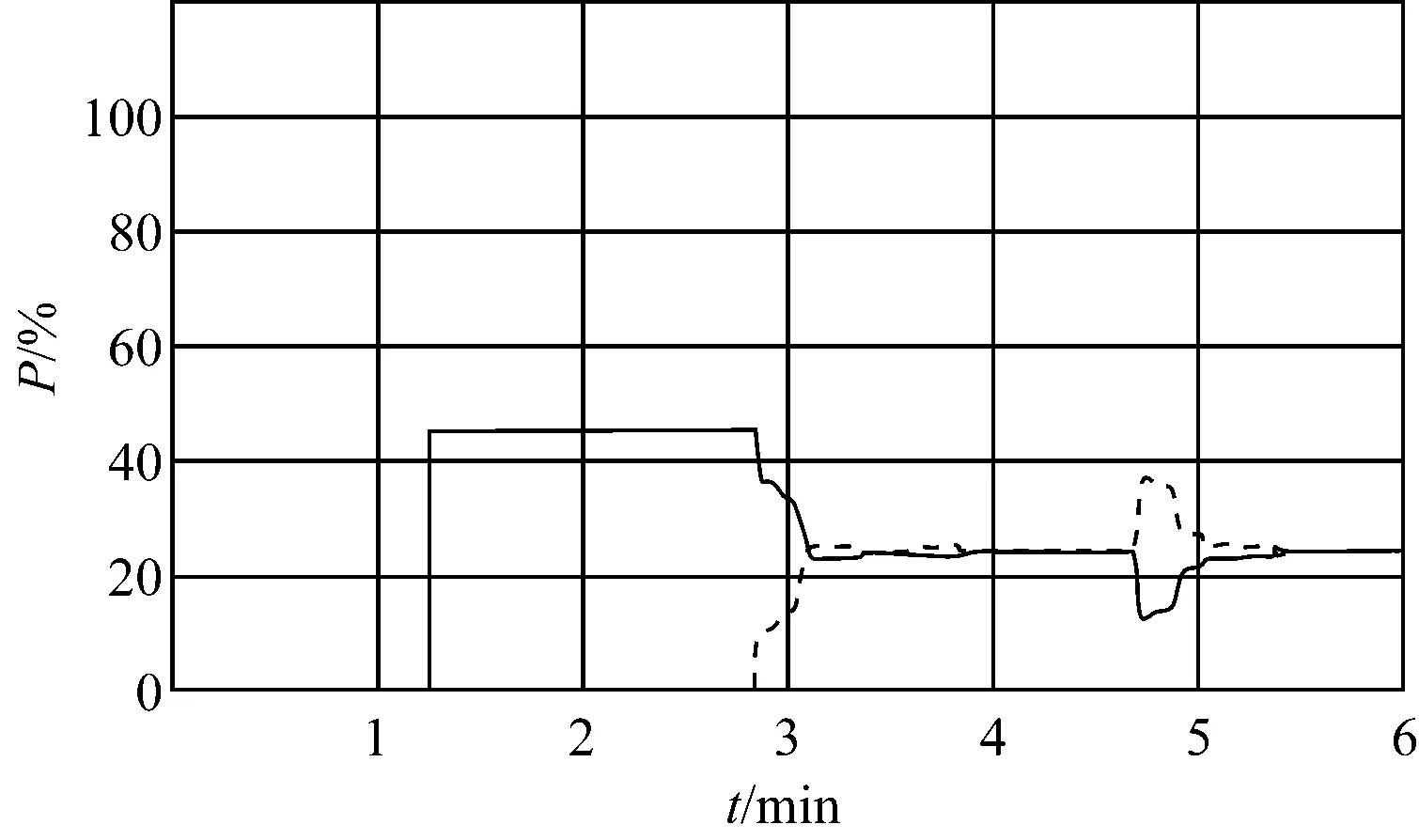
图9 极性调节模式趋势图
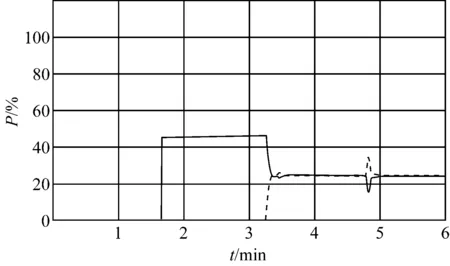
图10 模糊PID模式趋势图
4 结 语
针对现代船舶电力系统设备种类繁多、负荷大和变化频繁等特点,研发基于模糊PID控制算法的船舶负荷分配控制器,可根据模糊规则在线实时修改负荷分配控制器的PID参数。通过试验室模拟仿真可清晰地看到,经过优化算法控制的功率调节趋势可很好地规避简单极性判断模式导致的调节周期内的多次振荡和超调现象,并能提高系统控制的响应性,使发电机组并联工作在更加稳定的环境中。以模糊PID算法为基础的船舶负荷分配控制器可实际应用于我国引进的多种新型船舶及电力推进船舶中,同时有必要进一步开展针对模糊规则设计的研究。
[1] 黄伦坤,朱正鹏,刘宗德.船舶电站及其自动装置[M].北京:人民交通出版社,1994:201.
[2] 封少东.船舶电站负荷控制器的设计和实现[D].大连:大连海事大学,2011.
[3] 胡寿松.自动控制原理[M].北京:北京科学出版社,2001: 326-327.
[4] 邵淼晶.船舶电站原动机(柴油机)及其调速系统的混合仿真[D].哈尔滨:哈尔滨工程大学,2002.
[5] 张红光.柴油机电子调速复合控制策略研究[D].哈尔滨:哈尔滨工程大学,2012.
[6] 葛宝明,林飞.先进控制理论及其应用[M].北京:机械工业出版社,2007:156.
[7] 李华.用模糊控制实现PID参数自整定的研究[J].甘肃科学学报,1998,10(1):71-74.
Electric Load Distribution Control Algorithm Based on Fuzzy PID Control
HEXie,WANGHongxing
(Ship Automation Branch, Shanghai Ship & Shipping Research Institute, Shanghai 200135, China)
Today, ship power systems are facing more frequent rapid load fluctuations. This is demanding for the governor of the ship diesel engine. The power systems are normally equipped with the load distribution device which adjusts the load distribution according to the measures of the frequency/power variation. This paper develops the fuzzy dynamic optimization PID algorithm for adjusting effective duty ratio which will enhance the load distribution performance of the ship load distribution device.
ship diesel engine; governor; fuzzy PID control
2016-09-23
何 勰(1983—),男,江苏无锡人,工程师,从事舰船自动化研究。
1674-5949(2016)04-0049-06
U665.12
A
猜你喜欢
山东冶金(2022年4期)2022-09-14 08:59:30
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
通信电源技术(2016年4期)2016-04-04 02:57:28
水电站机电技术(2016年1期)2016-02-28 14:21:36
系统医学(2016年8期)2016-02-20 02:55:08
合成技术及应用(2015年3期)2015-12-11 08:36:27
新疆钢铁(2015年3期)2015-02-20 14:13:56
水电站机电技术(2014年4期)2014-10-13 08:30:03
水电站机电技术(2014年3期)2014-09-26 12:01:15