
基于AQWA的游艇耐波性数值模拟
2017-01-09 02:58吕鸿冠黄斯慧广东海洋大学海洋工程学院广东湛江524088
上海船舶运输科学研究所学报 2016年4期
吕鸿冠, 黄 技, 黄斯慧(广东海洋大学 海洋工程学院, 广东 湛江 524088)
基于AQWA的游艇耐波性数值模拟
吕鸿冠, 黄 技, 黄斯慧
(广东海洋大学 海洋工程学院, 广东 湛江 524088)
舒适性是游艇设计者最关注的性能之一,而游艇在环境载荷作用下的横摇、纵摇及垂荡运动响应直接影响到游艇的稳定性和舒适性。对此,利用海洋工程水动力计算软件AQWA对一款小型游艇的相关数据进行计算,得到环境载荷作用下游艇各自由度的运动响应。分析结果表明,该游艇的运动响应幅值稳定在合理的范围内,基本能满足日常的使用要求。
游艇; 运动响应; 边界元法; AQWA软件
0 引 言
游艇以娱乐、居家及商务为主要功能的定位,决定了设计游艇时对其耐波性的研究更倾向于保证其在风浪流联合作用下的稳定性,即将其各自由度的运动响应幅值控制在合理的范围内。目前对游艇舒适性的设计大多依靠工程经验来判断,或利用已有的经验公式进行计算。但是,游艇本身具有很强的定制性,即游艇的型线与传统船舶的型线有很大区别,这导致经验公式中很多系数的取值并不满足游艇的实际情况,计算结果往往存在较大的误差。
边界元法(Boundary Element Method, BEM)是一种出现在有限元法(Finite Element Method, FEM)和有限体积法(Finite Volume Method, FVM)之后的数值计算方法,其相对其他算法的最大优点是精度高、便于处理无限域问题。目前边界元法在海洋工程计算中的应用已有一定的沉淀和发展,但大多集中在海洋平台动力响应分析领域和舰船噪声计算领域,对传统船型及游艇的计算相对较少。胡毅等利用AQWA软件对大型液化天然气(Liquefied Natural Gas, LNG)船码头系泊进行研究,得到特定条件下LNG 船系泊状态的总体响应。张明等利用AQWA软件对打捞船工作过程中的稳性进行计算,对打捞过程中的安全性进行评估。这里利用AQWA软件对一款游艇进行基于湛江南海沿海航区常规环境载荷作用的运动响应数值模拟,为同类型游艇的计算提供参考和依据。
1 AQWA软件理论简述
AQWA软件基于规则波中的三维辐射/衍射理论,在线性流体理论下模拟各种浮式类和系泊类海洋结构物,对不同环境载荷下的各类海洋结构物进行水动力计算和分析。游艇的网格模型见图1。

图1 游艇的网格模型
网格划分采用系统控制法,生成的网格总数量为13 509个,其中水下部分的网格数量为7 585个。
游艇周围一阶波浪力的速度势为
(1)

入射波的速度势为
(2)
游艇受到的水压力可由线性Bernoulli方程求出
(3)
将水压力沿整个湿表面积求积分,可得到作用在游艇上的一阶波浪力为
(4)
式(4)中:波浪力分为2项,分别为入射力和绕射力。
通过求解式(5)即可求得游艇的响应幅值算子RAOs(Response Amplitude Operator)
(5)
式(5)中:Ms为结构质量矩阵;Ma为水动力附加质量矩阵;C为系统线性阻尼矩阵;Ks为系统总刚度矩阵;F为系统所受的波浪力;X为响应幅值算子;ω为入射波频率。
2 环境载荷参数
该游艇的航区为湛江南海的沿海航区,文献[10]和文献[11]中有对该航区风浪的详细统计分析。按照湛江南海沿海航区的实际情况和相关游艇规范,从文献[10]和文献[11]中选取风浪参数(见表1)。

表1 南海沿海航区环境载荷
3 计算结果分析
游艇在环境载荷作用下的运动包括3种平动(分别为横荡、纵荡、垂荡)及3种转动(分别为横摇、纵摇、艏摇),其中横摇、纵摇和垂荡是最重要的运动参数,关系到游艇的稳定性和安全性,设计游艇时应优先考虑。计算时取3 600 s为1个计算历程,时间步长为0.1 s,总迭代次数为36 000次。表2为基于AQWA的游艇运动响应数据。
3.1 游艇的运动响应与环境载荷作用角的关系
游艇受不同方向环境载荷的作用,某些方位的载荷会使其运动响应出现幅值。游艇的横摇、纵摇及垂荡运动响应随环境载荷作用角的变化规律见图2~图4。

表2 基于AQWA的游艇运动响应数据

图2 游艇横摇响应随作用角的变化
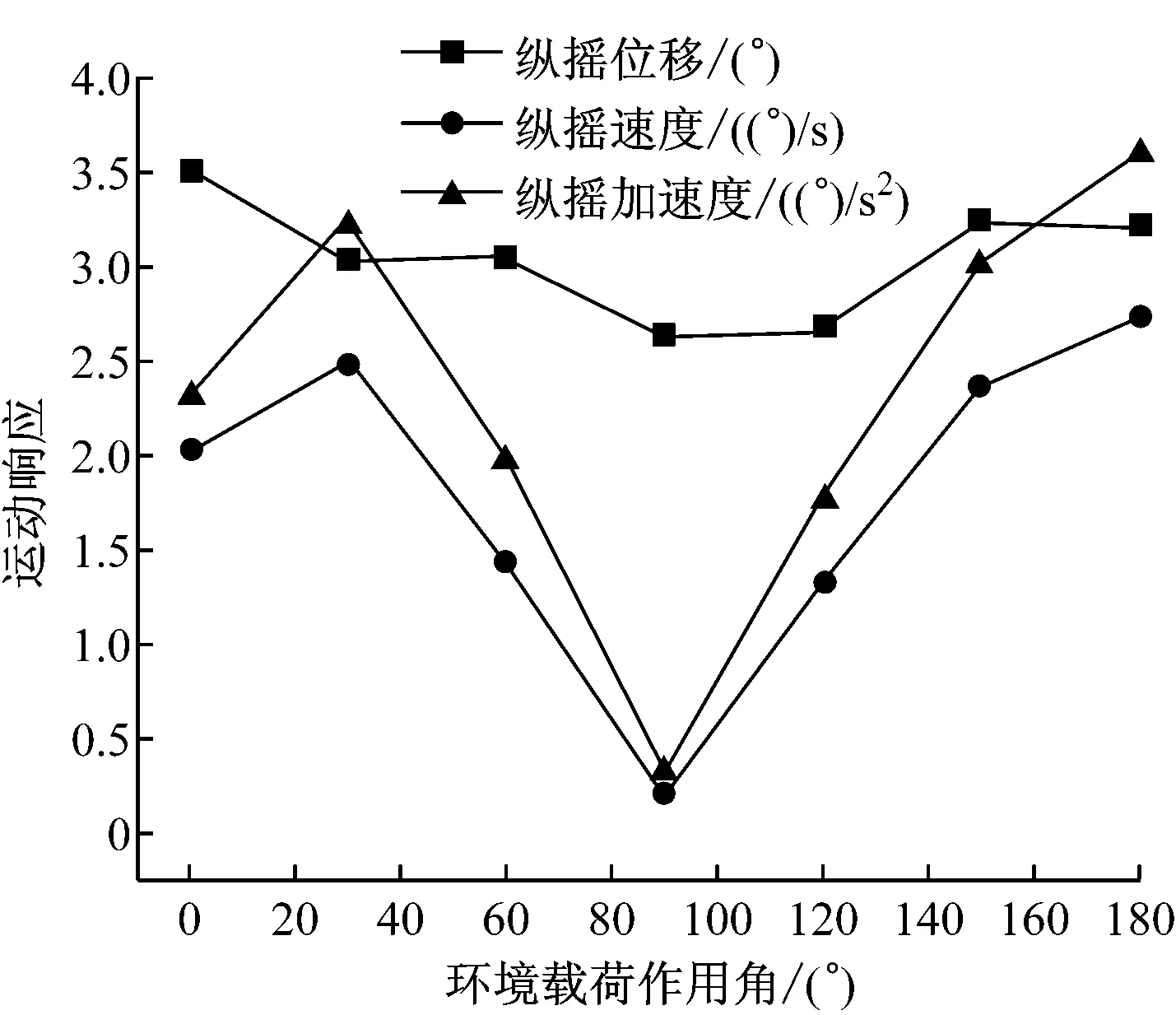
图3 游艇纵摇响应随环境载荷作用角的变化

图4 游艇垂荡响应随环境载荷作用角的变化
由图2和图3可知,环境载荷作用角对游艇的横摇和纵摇运动响应影响很大:当作用角为90°时,横摇运动响应出现幅值;由图3可知,当作用角为0°和180°时,纵摇运动响应出现幅值。由图4可知,环境载荷作用角对游艇的垂荡运动响应影响不大,即在不同环境载荷作用角下游艇的垂荡运动基本稳定在1个常量附近。综合上述分析可知,游艇的运动响应幅值应出现在0°,90°,180°的环境载荷作用中,由于游艇具有对称性,取0°和90°这2个方向计算游艇的运动响应特性。
3.2 游艇在0°及90°环境载荷作用角下运动响应的时历曲线
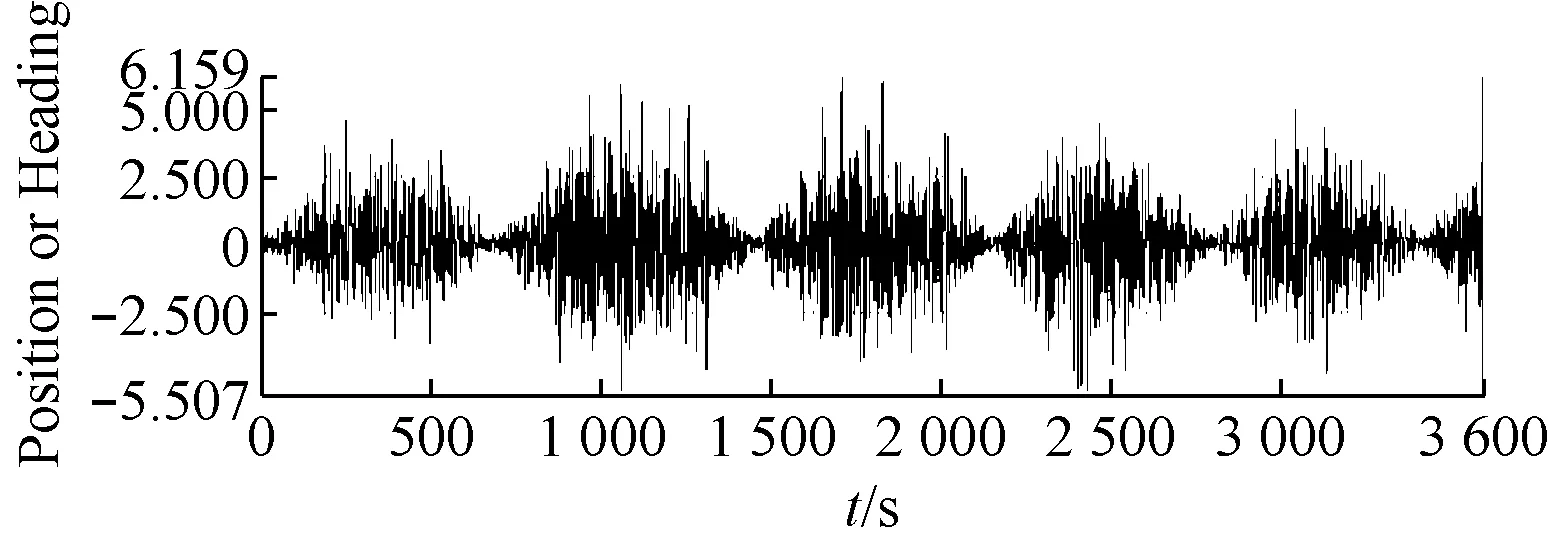
游艇在0°及90°环境载荷作用角下的运动响应时间历程曲线分别见图5和图6。
由图5和图6可知,游艇的运动响应在计算时间内绕初始点上下振荡,响应幅值的绝对值大小基本相等,且没有出现巨幅的运动响应,说明游艇的重心位置设计合理,没有出现附加的横倾力矩和纵倾力矩。
a) 横摇响应时间历程

b) 纵摇响应时间历程

c) 垂荡响应时间历程

a) 横摇响应时间历程

b) 纵摇响应时间历程

c) 垂荡响应时间历程
3.3 游艇运动响应谱
游艇的运动响应幅值算子RAOs的计算结果见图7和图8。

a) 横振RAOs

b) 纵摇RAOs

c) 垂荡RAOs

a) 横摇RAOs

b) 纵摇RAOs

c) 垂荡RAOs
(1) 0°作用角时,0.35 Hz区域的载荷频率是游艇横摇和纵摇响应的共振频率区间,波浪周期约为3 s,3~15 s的波浪周期属于常见周期,设计时需重点考虑。游艇在该波浪频率内工作可能会出现较大的运动响应,响应幅值相对其他波浪频率高出1个数量级。但是,即使出现共振,其横摇响应幅值仍处于可接受范围内。这是因为0°作用角时环境载荷对横摇响应的影响很小,主要集中在纵摇响应上。而纵摇响应的幅值约为10°,即在共振频率范围内工作会产生约10°的艏倾(艉倾),严重影响游艇的稳定性,设计时需特别注意。
而对于垂荡响应,其共振频率向前推移,基本避开了常见的波浪周期,设计时可减少对垂荡响应共振频率的考虑。
(2) 90°作用角时,共振频率与0°作用角基本保持一致。但是,90°作用角的环境载荷对船体的稳定性和安全性影响很大。由图8可知,在共振频率区间内横摇的响应幅值非常大,而横摇响应过大是大部分船舶倾覆的主要原因。因此,设计游艇时应重点考虑横摇响应的共振频率,避免其在横摇共振频率区间进行工作。
4 结 语
利用海洋工程水动力计算软件AQWA对一款游艇的日常工作状态进行数值模拟和数据分析,得到以下结论:
(1) 当环境载荷的作用方向与游艇的中纵剖面和中横剖面相垂直时,游艇的运动响应会出现幅值;
(2) 环境载荷的作用方向对横摇和纵摇响应有很大的影响,而对垂荡响应的影响很小;
(3) 游艇运动响应的共振频率接近于常见的波浪频率,设计游艇时需考虑共振带来的影响;
(4) 对于共振现象需特别注意横摇响应的共振频率区间和横摇响应的幅值大小,最大限度地使游艇的共振频率避开常见的波浪频率。
Numerical Simulation of Seakeeping Ability of a Yacht with AQWA
LYUHongguan,HUANGJi,HUANGSihui
(College of Ocean Engineering, Guangdong Ocean University, Zhanjiang 524088, China)
The comfort is the most important requirements for a yacht. Rolling motion, pitch motion and heave motion are directly responsible for the stability and comfort of a yacht. Motion responses with different degree of freedom of a yacht are simulated by AQWA, the software for ocean engineering. The results show that the motion response of the yacht is stable in a rational domain under regular environmental load, which proves that the yacht is comfortable in daily use.
yacht; motion response; boundary element method; AQWA
2016-08-28
广东省大学生攀登计划项目(Pdjh2016a0226); 广东省青年创新人才类项目(2014KQNCX086);国家级大学生创新创业训练计划立项项目(CXXL2016019)
吕鸿冠(1994—),男,广东揭阳人,研究方向为船舶与海洋结构物设计。
1674-5949(2016)04-0022-04
U662.3
A
猜你喜欢
小猕猴智力画刊(2022年3期)2022-03-29
小猕猴智力画刊(2022年3期)2022-03-28
珠江水运(2021年1期)2021-11-23
中国船检(2017年3期)2017-05-18
江苏农业科学(2017年3期)2017-05-02
振动工程学报(2017年1期)2017-04-21
船舶(2016年5期)2016-11-10
科技视界(2016年4期)2016-02-22
航运交易公报(2015年17期)2015-05-27
中国水运(2015年4期)2015-05-11
