
基于AR的船舶运动极短期预报摇摆平台试验
2017-01-09 02:58喻元根马雪泉上海船舶运输科学研究所航运技术与安全国家重点实验室上海200135
上海船舶运输科学研究所学报 2016年4期
喻元根, 马雪泉, 季 盛(上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135)
基于AR的船舶运动极短期预报摇摆平台试验
喻元根, 马雪泉, 季 盛
(上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135)
精确船舶在实际海洋环境中的运动极短期预报具有重要的研究意义。对此,采用自回归(Auto-Rergressive AR)模型进行船舶升沉纵摇极短期预报研究,并进行摇摆台试验。经过对比运动测量值与运动极短预报值,所得预报值与测量值的吻合度较高,预报精度良好。
AR模型;船舶运动;极短期预报;摇摆平台
0 引 言
精确船舶在实际海洋环境中的运动极短期预报对研究相关作业活动(如舰载机起降、吊装作业等)具有重要意义。运动极短预报精度影响着运动补偿的效果,可为动力定位和减摇等控制系统研究提供可靠的数据支持。赵希人等[1]给出舰船运动极短期建模预报的研究现状;彭秀艳等[2]提出一种基于AR模型的投影预报方法,并在物理仿真系统中取得满意的预报结果;陈远明等[3]采用基于AR模型的最小二乘法进行船舶运动预报,并进行水池试验。这里采用自回归(Auto-Regressive, AR)模型的递推形式进行直接预报。
1 试验简介
1.1 六自由度摇摆平台
选用六自由度摇摆平台(见图1)模拟船舶横荡、纵荡、垂荡、横摇、纵摇和艏摇等6个自由度的运动,包括规则波和不规则波中的运动。与水池试验相比,该摇摆平台试验不仅能完成特定的试验功能,还可使试验成本大大降低。

图1 六自由度摇摆平台
1.2 试验内容
在摇摆平台模拟船舶在规则波和不规则波中的升沉和纵摇耦合运动,船舶所处波浪环境参数见表1,采用HydroStar软件计算出船舶运动响应函数(Response Amplitude Operator, RAO)得到船舶运动参数,不规则运动参数通过谱分析得到。模型缩尺比为12.0。将得到的运动参数输入可摇摆平台中,使用传感器采集摇摆平台的实际运动参数,对采集到的数据进行船舶运动极短期预报,采样频率为100 Hz。
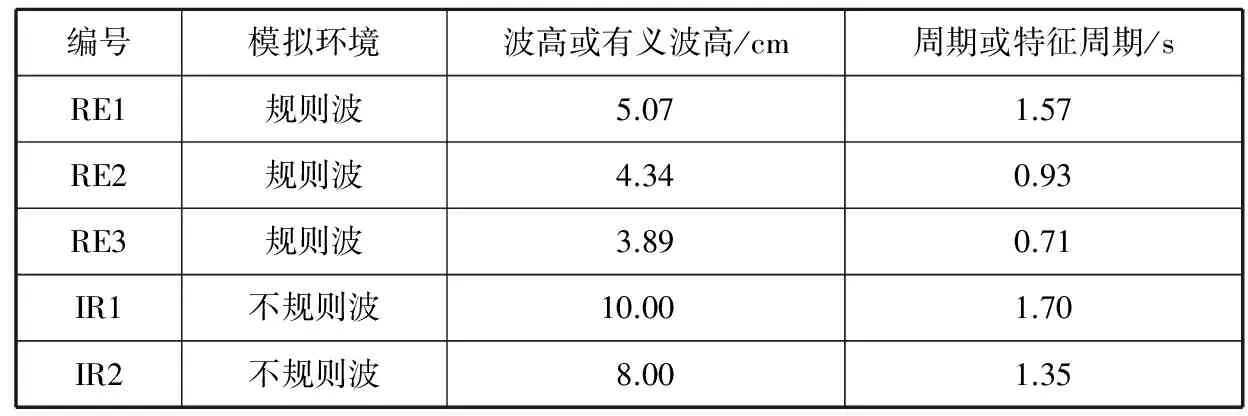
表1 船舶所处的波浪环境参数
2 预报方法
根据实时测量的运动时历数据进行未来一段时间内的船舶运动极短期预报。使用AR模型的递推形式进行直接预报,首先采用莱文森-德宾(Levison-Durbin,LD)递推算法得到各阶数的模型系数,之后采用信息准则(BIC)定阶,进而预报未来几步内船舶的运动[4-5]。
2.1 AR模型一般形式
对于零均值的平稳随机过程,假设已采集的时间序列为{xt},AR模型的一般形式为
xt+1=φ1xt+φ2xt-1+…+φpxt-p+1
(1)

2.2 向前l步预报公式
向前l步预报公式为
(2)
2.3 L-D算法
(3)
L-D算法递推算法的计算步骤如下。
1)初始化:取p=1时,得
(4)
反射系数为
(5)
式(5)中:Ψ为过渡参数,可由式(6)求得
φp-1jRp-j
(6)
进行阶模型的回归系数估计,可得
(7)
由式(4)~式(7)可知,从初始值φ11=R1/R0开始,随着p的增加,φpj(j=1,2,…,p)的值可由φ(p-1)j(j=1,2,…,p-1)递推算出。
(8)
在递推的过程中所有阶数≤p的模型参数都已求出。
2.4 信息准则(BIC)定阶
上述算法确定后,对于固定长度为N的历史时历数据,需确定阶数p来优化预报结果。取p=N,按照L-D算法计算出各系数。采用BIC准则,BIC值最小时所对应的p为所确定的阶数,即
BIC(p)=lgγ+(p+1)(lgN)/N,p=1~N-1
(9)
式(9)中:γ为
φpixt-i)2
(10)
3 预报结果
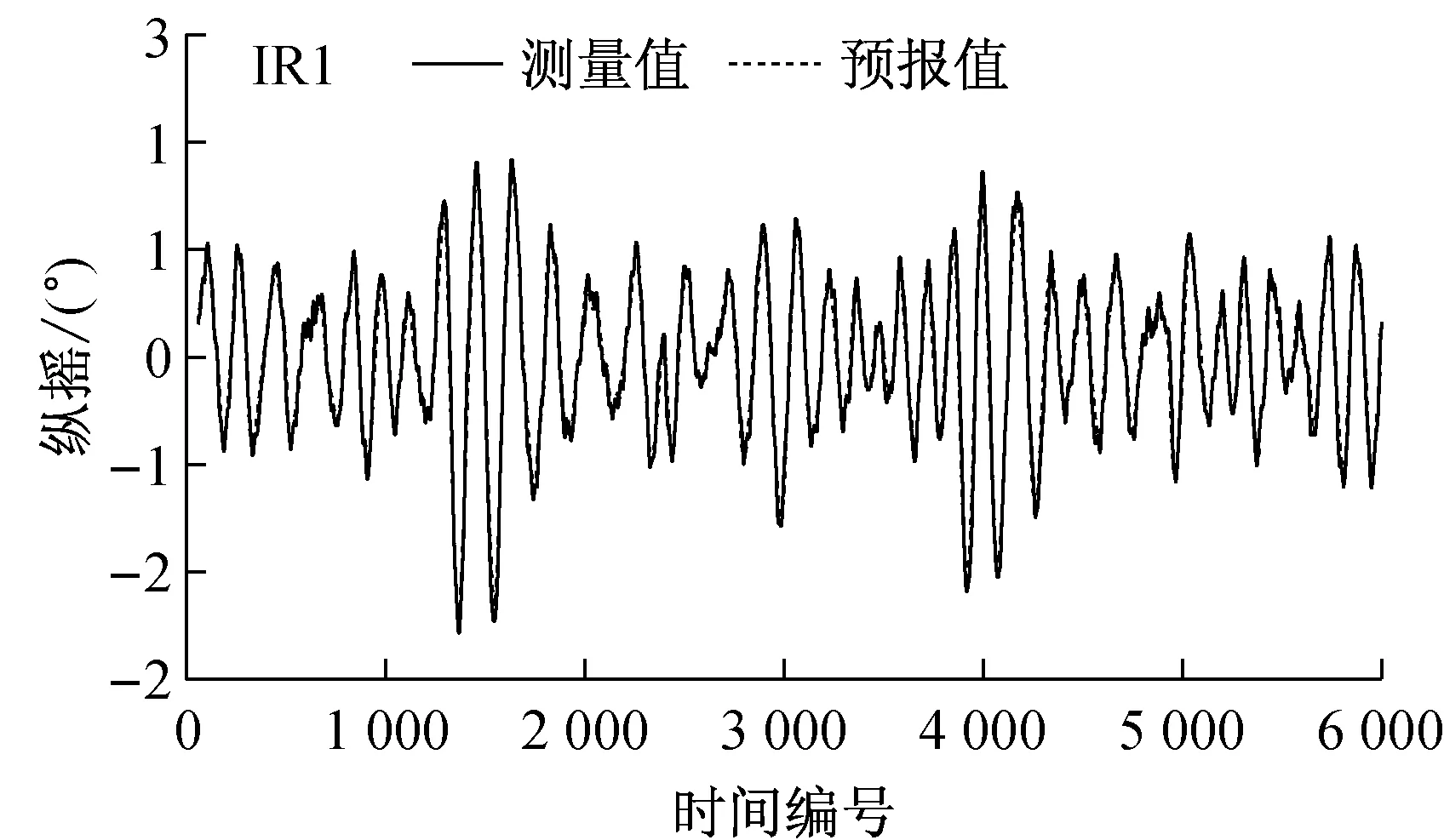
RE1和IR1环境下的升沉、纵摇测量值与1步预报值对比见图2和图3。由图2和图3可知,预报值与测量值吻合度较好。
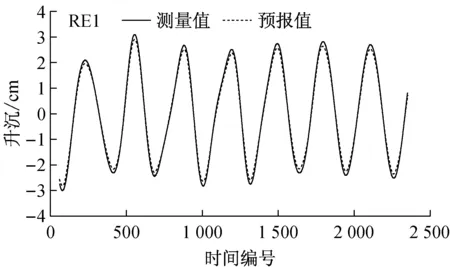
a)升沉
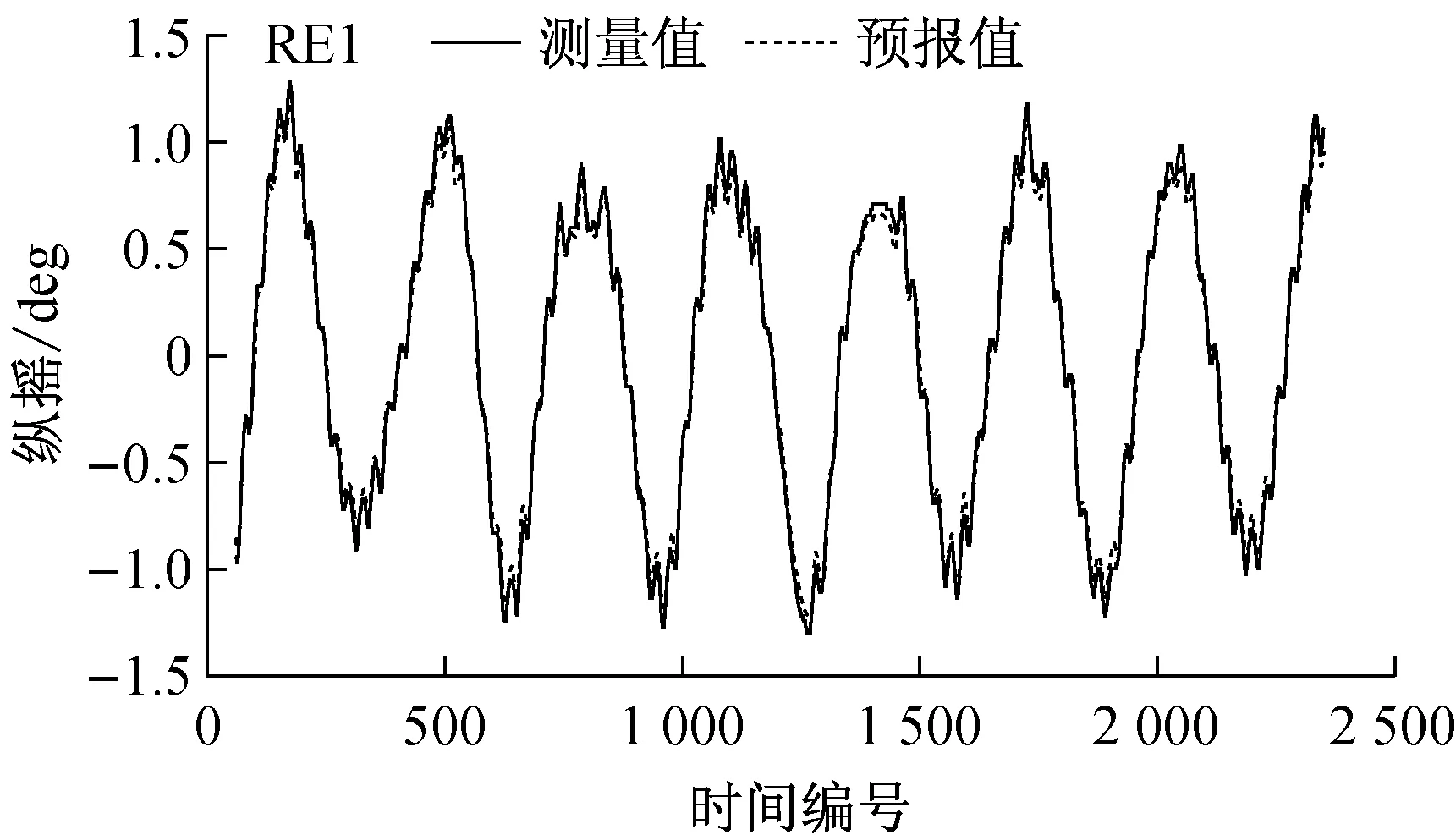
b)纵摇
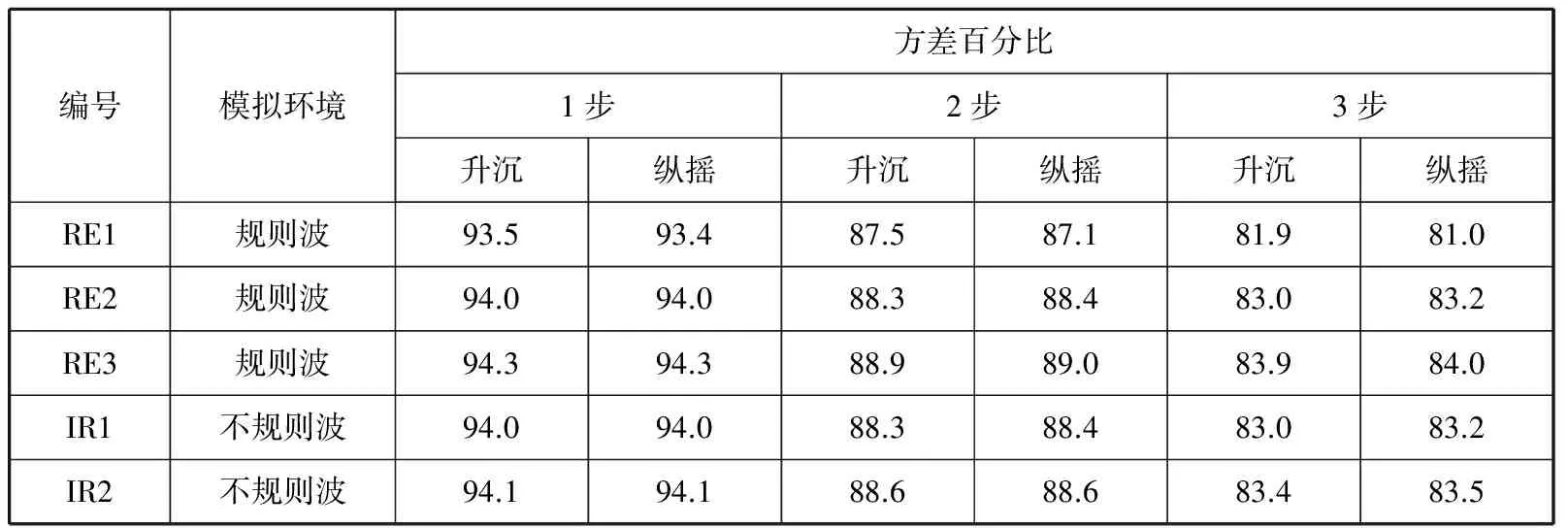
根据摇摆平台试验对模型预报结果进行分析,定义预报精度为M个预报值的方差与对应的M个测量值方差百分比,进行3步预报,预报精度见表2。由表2可知:3步内的预报精度>80%;其他条件相同的情况下,不同试验模拟环境的预报精度相当。

a)升沉
b)纵摇
4 结 语
采用AR模型的递推形式进行直接预报,运用L-D递推算法得到各阶数的模型系数;通过BIC准则定阶,预报未来几步内船舶的运动并进行摇摆平台试验,模拟规则波、不规则波中船舶的升沉、纵摇运动。对比运动测量值与运动极短期预报值,二者吻合度较高,预报精度良好。
[1] 赵希人,彭秀艳,沈艳,等. 舰船运动极短期建模预报的研究现状[J].船舶工程,2002(3):4-8.
[2] 彭秀艳,赵希人,魏纳新,等. 大型舰船姿态运动极短期预报的一种AR算法[J].船舶工程,2001(5):5-7.
[3] 陈远明,叶家玮,张兮龙. 船舶运动的极短期预报试验[J].船海工程,2010,39(1):13-15.
[4] 林洪桦. 动态测试数据处理[M].北京:北京理工大学出版社,1995.
[5] HAMILTON J D. 时间序列分析[M].夏晓华,译.北京:中国人民大学出版社,2015.
Short Time Prediction of Ship Motion Based on AR Model and Stewart Platform Experiment
YUYuangen,MAXuequan,JISheng
(State Key Laboratory of Navigation and Safety Technology, Shanghai Ship & Shipping Research Institute, Shanghai 200135, China)
How to achieve short time prediction of the motion of a ship at seas is an interesting problem for ship designers. This paper presents short time prediction of heave and pitch based on Auto-Regressive (AR) model and the experiments on stewart platform. The comparison between the measurement and the prediction shows that they tally with each other, indicating good prediction accuracy.
AR model; ship motion; short time prediction; stewart platform
2016-06-29
喻元根(1972—),男,江西宜春人,工程师,主要从事机械自动化控制及船舶模型试验研究。
1674-5949(2016)04-0004-04
U661.3
A
猜你喜欢
一重技术(2021年5期)2022-01-18
船舶(2021年4期)2021-09-07
船舶标准化工程师(2019年4期)2019-07-24
电子制作(2018年11期)2018-08-04
军工文化(2017年12期)2017-07-17
军事文摘·科学少年(2017年4期)2017-06-20
中国船检(2017年3期)2017-05-18
军事文摘·科学少年(2017年2期)2017-04-26
华人时刊(2016年16期)2016-04-05
少儿科学周刊·儿童版(2016年1期)2016-03-14
