
四点中心差分法在EGR阀开度PID控制算法中的应用研究
2017-01-07 05:29褚全红张科勋张春孟长江郝守刚李进
车用发动机 2016年6期
褚全红, 张科勋, 张春, 孟长江, 郝守刚, 李进
(1. 中国北方发动机研究所(天津), 天津 300400; 2. 清华大学, 北京 100084;3. 常州易控汽车电子有限公司, 江苏 常州 213164)
·设计计算·
四点中心差分法在EGR阀开度PID控制算法中的应用研究
褚全红1, 张科勋2, 张春1, 孟长江1, 郝守刚3, 李进3
(1. 中国北方发动机研究所(天津), 天津 300400; 2. 清华大学, 北京 100084;3. 常州易控汽车电子有限公司, 江苏 常州 213164)
EGR系统通过调整阀开度实现对再循环已燃气体的流量控制,现有EGR阀开度控制算法多采用传统PID控制算法。传统PID控制算法中,差分项对数据误差和干扰较敏感,易引起振荡。针对这一问题,采用四点中心差分法代替原有一阶后向差分算法,考虑过去4个时刻的误差,通过时间加权求和得到优化的差分量,该方法可减少数据误差对差分项的干扰。采用阶跃响应曲线法对PID参数进行整定。追踪三角波目标开度的试验结果表明,利用该改进算法及参数整定方法可得到一套控制效果较好的EGR阀控制算法及控制参数,所控EGR阀可准确跟踪目标开度的快速变化,满足实际使用的要求。
柴油机; 废气再循环; PID控制; 四点中心差分法
废气再循环(Exhaust Gas Recirculation, EGR)技术常用于降低NOx排放[1-3],其原理在于将部分已燃烧的气体返回至缸内参与燃烧。由于NOx产生的条件是高温富氧,使用EGR系统后,返回的已燃气体可降低混合气中的氧浓度,从而降低燃烧温度,最终可有效抑制NOx的生成[4-6]。
根据实现途径分类,EGR系统可分为内部EGR系统和外部EGR系统,目前应用较为广泛的是外部EGR系统。内部EGR主要是通过调整进、排气门相位,使部分废气残留在缸内,实现手段主要有废气残留法和废气重吸法[7]。外部EGR系统通过一个通道将排气管与进气管相连,实现从排气管中引出部分废气注入进气管中,与新鲜空气混合后注入气缸。外部EGR的优势在于可通过冷却器降低废气温度,更有利于降低NOx排放。外部EGR系统的连接通道中都设置有EGR阀,通过调整EGR阀的开度实现对再循环已燃气体的流量控制。
控制算法理论研究中,多将EGR与VNT(Variable Nozzle Turbocharger, 可变截面涡轮增压器)作为发动机空气系统的两个主要控制对象综合考虑,通过建模分析空气系统特性[8-9],并在此基础上进行了基于H∞控制方法[10]、非线性设计的CLF(Control Lyapunov function)方法[11]、滑模控制器[12-13]等多种控制算法的理论研究。但在实际产品应用中,理论算法过于复杂,并未广泛采用,多采用双PID闭环算法。外环PID算法控制目标为发动机进气量,根据实际进气量与发动机工况预设的目标进气量计算得到EGR阀的目标开度。内环PID算法控制目标为EGR阀开度,根据实际EGR阀开度与外环算法输出的目标开度计算得到EGR阀驱动控制信号,如驱动占空比或驱动电流等。
由于PID算法中微分算法对输入信号的噪声很敏感,所以对于内环EGR阀开度控制,常由于微分算法放大了开度信号噪声引起振荡,这种现象在EGR阀开度瞬态过程中经常发生。为解决这一问题,本文研究引入了四点中心差分法处理微分输入信号,提高了EGR阀开度控制的精度。
1 EGR阀控制机构及传统PID算法
EGR阀可采用多种执行器,如直流电机[14]、采用负压空气源的真空执行器[15]等,目前产品中应用较多的为直流电机型EGR阀。采用直流电机的EGR阀结构示意图见图1。
该机构中直流电机可控制旋转部件,再通过与旋转部件相连的滚轮控制阀杆。通过阀杆与安装壳体之间的弹簧实现对阀杆的复位。调整EGR阀开度时,通过直流电机带动旋转部件转动,转动方向如图2所示,再通过滚轮与滑槽的相互作用,带动阀杆向下运动。通过调整直流电机驱动电流的大小就可控制阀杆的开度。
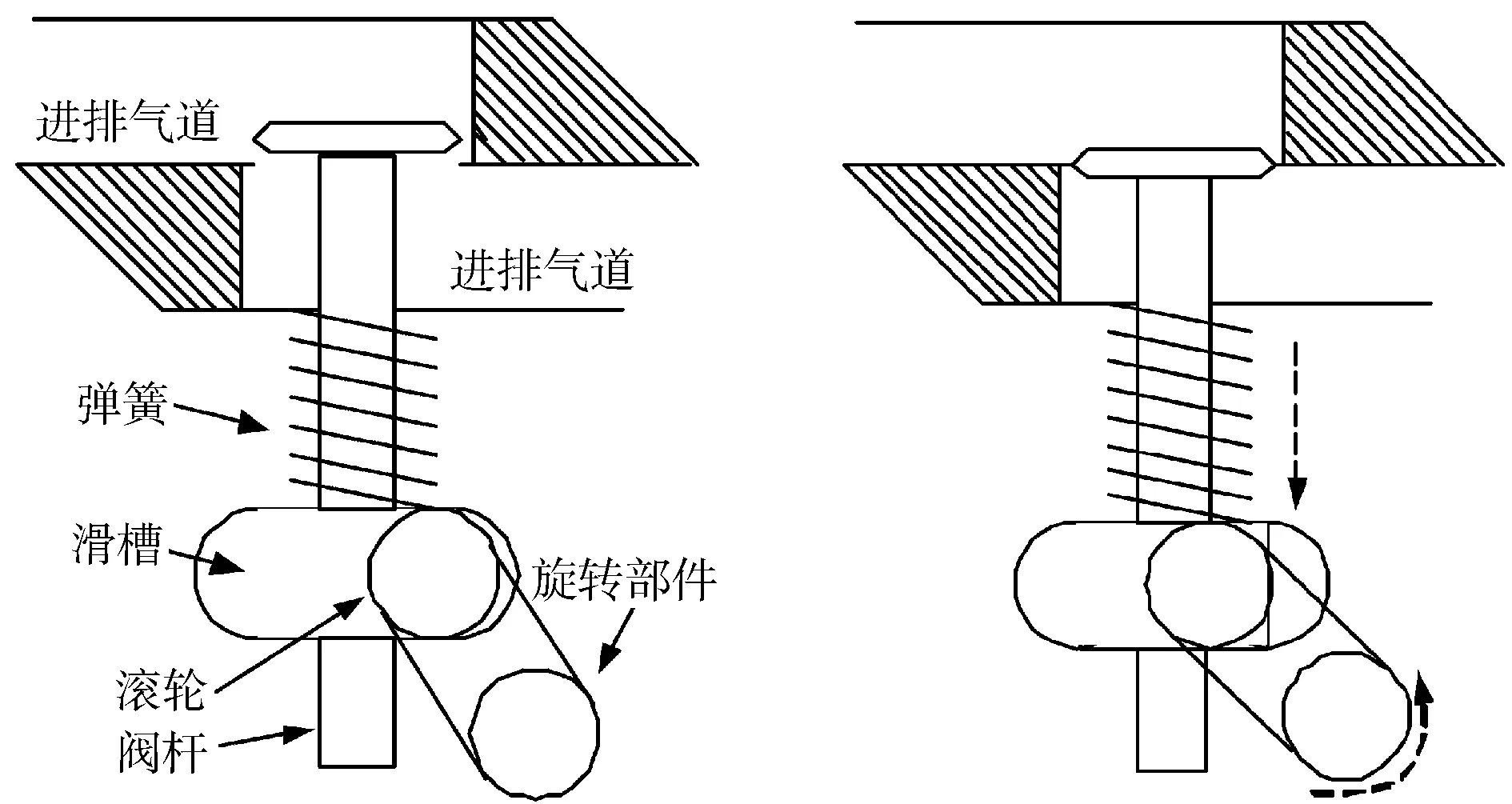
图1 EGR阀结构示意 图2 EGR阀运动示意
传统PID算法的算法结构见图3。图中,输入R为目标开度,输出Y为实际开度,E为开度误差,输出控制项u为驱动占空比,KP为比例系数,TI为积分时间常数,TD为微分时间常数。

图3 PID算法结构
采用累加求和近似积分项,一阶后向差分近似微分项,对应的位置式数字PID控制算法见式(1)[16-17]。

上述算法可在稳态工况取得较好的控制效果,但是在动态工况中,差分算法对数据误差及噪声较为敏感,导致微分D参数较难标定。如D参数设置过大,则易引起系统振荡,而D参数设置过小,又不能抑制系统超调,显著缩短系统稳定时间。为解决这一问题,本研究将四点中心差分法应用于PID算法中的微分项以抑制干扰,提高 EGR阀杆开度的快速响应能力,该能力是提高EGR系统瞬态控制效果的关键[18]。
2 采用四点中心差分法的PID算法设计
传统PID算法中,差分项等于[e(k)-e(k-1)],其对数据误差和干扰特别敏感,因此在数字式PID控制中,干扰主要是由差分项引起的。但是由于差分项可减弱系统振荡,提高系统稳定性,因而不能舍去。基于以上考虑,采用四点中心差分法对差分项进行修正。

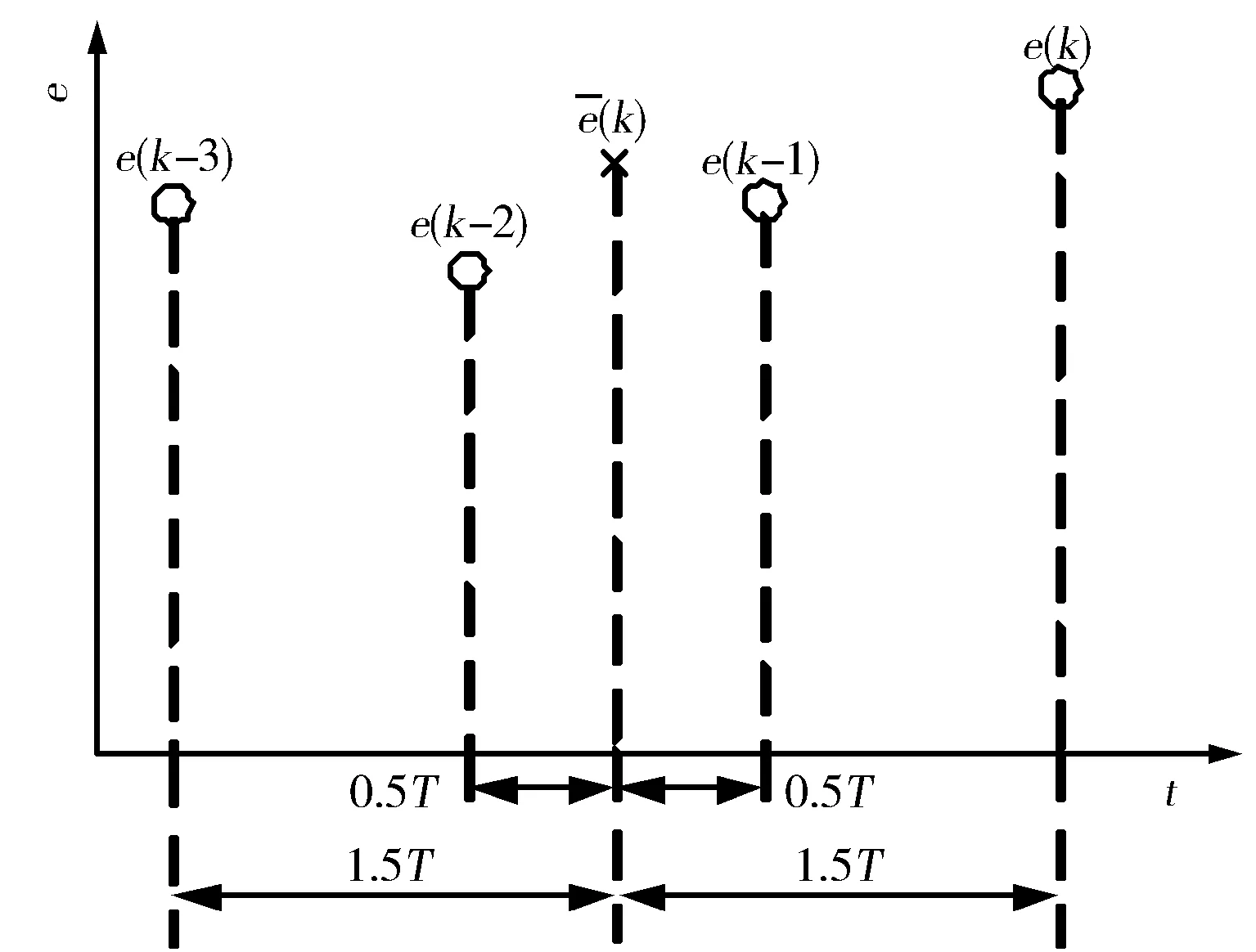
图4 四点中心差分法基本原理
将式(3)代入位置式PID算法式(1),得到采用四点中心差分法的位置式PID算法:
3 控制系统参数整定方法
本研究采用阶跃响应曲线法对PID参数进行整定,其原理见图5。该方法中,输入幅值为u0的阶跃信号,测开环系统的阶跃响应信号。响应曲线中,在最大斜率处(拐点处)作切线,求得滞后时间Tu、时间常数Tg,由此计算得到基准参数Kr(见式(5))。对应的推荐PID参数见表1。

图5 阶跃响应曲线
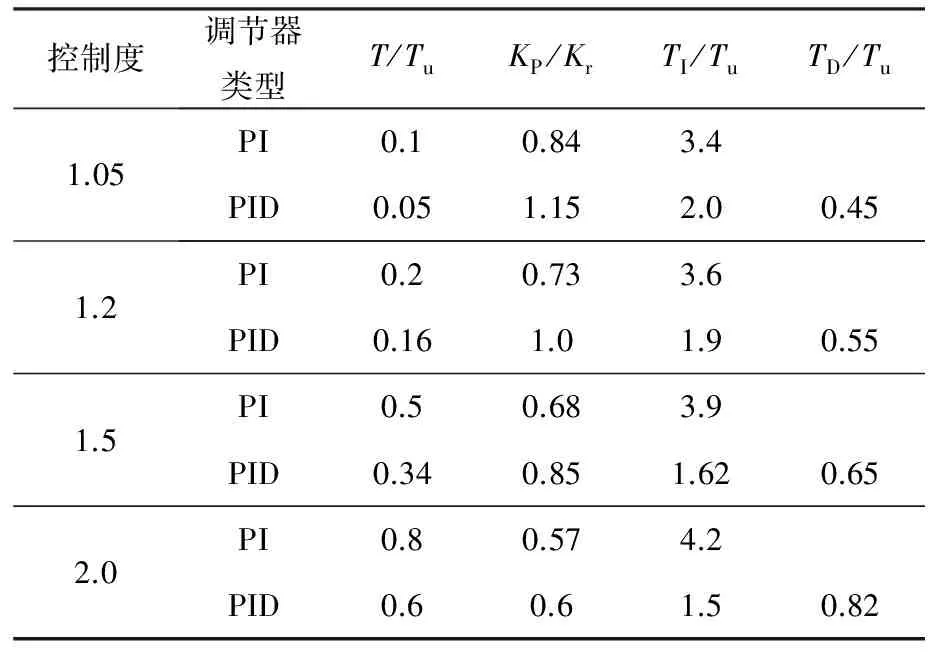
控制度调节器类型T/TuKP/KrTI/TuTD/Tu1.05PI0.10.843.4PID0.051.152.00.451.2PI0.20.733.6PID0.161.01.90.551.5PI0.50.683.9PID0.340.851.620.652.0PI0.80.574.2PID0.60.61.50.82
4 控制系统参数试验
为确定PID控制参数,按照第3章所述阶跃响应曲线法进行试验。试验采用直流电机驱动EGR阀作为执行器。该系统中,EGR阀开度反馈信号为电压信号。将阀完全关闭位置对应的电压信号定义为0%开度,阀最大开启位置对应的电压信号定义为100%开度,其余开度通过两者插值计算得到。EGR阀的驱动信号为PWM信号,控制范围为0%~100%。
以占空比12%的PWM信号作为阶跃输入信号u0,阶跃响应试验结果见图6。

图6 阶跃试验结果
对照图5得到此系统对应的Tu为0.02 s,Tg为0.30 s,y∞为20.5%。控制周期为10 ms。根据表1所示推荐值,选取控制度2.0对应的PID参数,得到KP,KI,KD分别0.068,0.023,0.112。
5 控制算法验证试验
为验证控制算法及整定参数的控制效果,在EGR阀控制器中通过编程实现式(4)所示的采用四点中心差分法的位置式PID算法,并采用参数整定试验结果进行了瞬态控制试验。
控制系统的输入为EGR阀目标开度,输出为EGR阀驱动占空比,控制算法采用四点中心差分法的位置式PID算法,控制参数KP,KI,KD采用第4章所述参数整定试验的试验结果。
验证试验中,EGR阀目标开度采用快速变换的三角波波形模拟实际瞬态工况中EGR阀快速变化的响应要求。三角波峰峰值为10%与90%,周期设定为4 s。上述控制系统的试验结果见图7,控制误差见图8。
图8所示开度误差表明:当目标开度快速上升时,绝对误差维持在±4%;当目标开度快速下降时,绝对误差维持在±1%;目标开度换向的时候,误差峰值在8%左右。
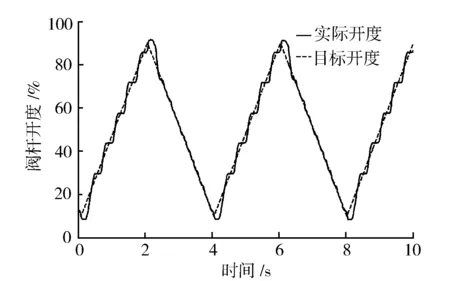
图7 三角波追踪试验结果

图8 三角波追踪试验绝对误差
试验结果说明:改进的四点中心差分PID算法结合简单的阶跃响应参数整定试验,可得到一套控制效果较好的EGR阀控制算法及控制参数,该控制系统可有效地控制EGR阀追踪快速变化的目标开度。目标开度下降过程的控制效果优于上升过程的控制效果,其原因可能是因为受到复位弹簧的影响,上升过程中直流电机需要克服复位弹簧拉力才能提升阀杆,导致阀杆出现明显的卡滞现象,而下降过程中直流电机无需克服复位弹簧拉力,卡滞现象并不明显,最终表现为控制参数较适用于下降过程,而上升过程应进一步优化控制参数,改善卡滞现象。
6 结束语
针对EGR阀开度控制算法,在传统PID控制算法的基础上,利用过去4个时刻的误差对当前的差分量进行估计,采用四点中心差分法代替原有一阶后向差分算法,以减少数据误差对差分项的干扰,改善了微分项控制效果。同时利用阶跃响应曲线法对控制参数进行了整定。验证试验中,利用三角波作为EGR阀开度目标值模拟发动机瞬态工况中目标开度的快速变化。试验结果表明,采用该算法及对应参数整定方法可得到一套控制效果较好的EGR阀控制算法及控制参数,所控EGR阀可准确跟踪目标开度的快速变化,满足实际使用的要求。但控制过程中,上升过程误差大于下降过程误差,其原因可能在于受到复位弹簧的影响,上升过程控制参数需进一步优化。
[1] Paul Z,Hans A,Walter R.Cooled EGR-A key technology for future efficient HD diesels[C].SAE Paper 980190,1998.
[2] Abd-Alla G H.Using exhaust gas recirculation in internal combustion engines:a review[J].Energy Conversion and Management,2002,43:1027-1042.
[3] 林建华,倪计民.废气再循环系统在车用发动机上的应用研究[J].车用发动机,2007(2):1-4.
[4] 韩林沛,刘洪涛,孙博,等.EGR对车用柴油机性能影响的试验研究[J].车用发动机,2012(1):51-55.
[5] 郭亮,刘忠长,田径,等.车用重型高压共轨柴油机EGR性能及优化[J].车用发动机,2009(2):49-53.
[6] 谭建勋,王志伟,李伟,等.内部EGR增压中冷柴油机排放性能试验研究[J].车用发动机,2011(3):51-54.
[7] 谢辉,赵华,杨林,等.基于可变气门定时策略的HCCI汽油机试验研究[J].内燃机学报,2005,23(6):510-517.
[8] 李进.电控柴油机综合控制系统研究[D].北京:清华大学,2006.
[9] Kolmanovsky I V,Stefanopoulou A G,Moraal P E,et al.Issues in modeling and control of intake flow in variable geometry turbocharged engines[C]//Proceedings of 18th IFIP Conference on System Modelling and Optimization.Detroit:[s.n.],1997:191-196.
[10] Nieustandt M V,Moraal P E,Kolmanovsky I V,et al.Decentralized and multivariable designs for EGR-VGT control of a diesel engine[C]//Proceedings of IFAC Workshop Advances in Automotive Control.Ohio:[s.n.],1998:191-196.
[11] Mrdjan Jankovic,Miroslava Jankovic,Kolmanovsky I V.Constructive lyapunov control design for turbocharged diesel engines[J].IEEE Transactions on Control Systems Technology,2000,8(2):288-299.
[12] Vadim I Utkin,Hao-Chi Chang,Kolmanovsky I V. Sliding mode control for variable gemometry turbocharged diesel engines[C]//Proceedings of the American Control conference. Chicago:[s.n.],2000.
[13] Devesh Upadhyay.Modeling and model based control design of the VGT-EGR system for intake flow regulation in diesel engines[D].Ohio:Ohio State University,2001.
[14] 张科勋,褚全红,张春,等.EGR系统直流电机执行器双闭环位置控制算法研究[J].车用发动机,2012(6):6-9.
[15] 张科勋,李进,周明,等.采用真空执行器的柴油机空气系统闭环控制[J].清华大学学报(自然科学版),2006,46(8):1458-1461.
[16] 陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998.
[17] Gene F Franklin,David Powell J,Abbas Emami-Naeini.动态系统的反馈控制[M].北京:电子工业出版社, 2004.
[18] Guzzella L,Amstutz A.Control of diesel engines[J].IEEE Control Systems Magazine,1998,18(2):53-71.
[编辑: 袁晓燕]
Application of Four-point Central Difference Method in EGR Valve Opening PID Control Algorithm
CHU Quanhong1, ZHANG Kexun2, ZHANG Chun1, MENG Changjiang1, HAO Shougang3, LI Jin3
(1. China North Engine Research Institute(Tianjin), Tianjin 300400, China;2. Tsinghua University, Beijing 100084, China;3. ECTEK Automotive Electronic Systems Co., Ltd., Changzhou 213164, China)
The recirculating burned gas was manipulated by adjusting EGR valve opening, but the control algorithm of EGR opening usually adopted traditional PID control method. The difference term of traditional control method was sensitive to data error and disturbance so as to produce signal oscillation easily. For the problem, the four-point central difference method instead of first-order backward difference algorithm was used and the optimized difference term was acquired by the time-weighed sum of four moment errors so that the disturbance from data error reduced. The identification of control parameters was conducted with the step response curve. The results of tracing triangular wave valve opening show that the improved algorithm and adjusting parameter method can acquire a set of better EGR control algorithm and control parameters. The controlled EGR valve can precisely follow the rapid change of opening degree setpoint and meet the practical application requirements.
diesel engine; EGR; PID control; four-point central difference method
2016-08-18;
2016-11-25
褚全红(1968—),男,研究员,主要研究方向为柴油机控制;dt_cqh@163.com。
10.3969/j.issn.1001-2222.2016.06.002
TP273
B
1001-2222(2016)06-0008-04
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
中国科技纵横(2021年22期)2022-01-08
汽车维修与保养(2021年11期)2021-03-11
电子技术与软件工程(2020年17期)2020-02-02
电子制作(2019年23期)2019-02-23
电机与控制学报(2018年9期)2018-05-14
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
中文信息(2016年7期)2016-05-14
