
车辆ISD悬架系统网络综合及性能分析
2017-01-06 10:15聂佳梅张孝良陈国涛
振动与冲击 2016年24期
聂佳梅, 张孝良, 陈国涛
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
车辆ISD悬架系统网络综合及性能分析
聂佳梅, 张孝良, 陈国涛
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
为进一步改善车辆的乘坐舒适性,将惯容器元件应用到车辆被动悬架系统,构建ISD悬架,利用网络综合方法确定ISD悬架结构。以车身加速度均方根值为优化目标,求解出ISD悬架的正实阻抗传递函数,然后用惯容器、弹簧、阻尼元件将之物理实现出来,建立1/4车辆悬架模型。采用多目标优化方法对ISD悬架参数进行优化,在此基础上,分析随机和脉冲激励下ISD悬架系统的综合性能。结果表明,与传统悬架相比,ISD悬架系统具有良好的动态性能,车身加速度均方根值减小了26.83%,1~3 Hz范围内有效抑制了车身垂直振动,改善了车辆在低频段的乘坐舒适性。
悬架;惯容器;网络综合;多目标优化;乘坐舒适性
汽车悬架是车身与车桥之间一切传力装置的总称,传统悬架系统的主要隔振元件为弹性元件和阻尼元件。SMITH[1-2]基于机电相似性理论提出了惯容器元件,并将之应用到车辆悬架系统的研究中。由惯容器、弹簧和阻尼器组成的机械网络拥有比弹簧和阻尼机械网络更丰富的网络特性。同时,惯容器的出现解决了原本电子网络与机械网络不完美的对应关系,因此,可以利用针对R-L-C电子网络的网络综合理论去研究“惯容-弹簧-阻尼”(I-S-D)机械网络,以改善机械振动系统的隔振性能。
近年来,惯容器在车辆悬架系统、转向系统、建筑隔振系统中的应用研究成为了热点[3-7],网络综合与分析理论也不断地被应用到ISD悬架系统的研究中。WANG等[8]利用网络综合的方法提出了一种由滚珠丝杠惯容器和永磁电机组成的机电悬架,这种机电悬架的性能优于传统被动悬架。SCHEIBE等[9]基于1/4车辆悬架模型,用网络分析的方法,获得了行驶平顺性和操纵稳定性的全局最优。PAPAGEORGIOU等[10]尝试用正实综合方法研究ISD悬架系统,寻找出一种能够改善轮胎接地性能的ISD悬架结构。由惯容器、弹簧和阻尼元件组成的ISD悬架结构多种多样,到目前为止,对ISD悬架的研究,都是先假定悬架结构,然后采用各种方法优化悬架结构参数。这样容易将ISD悬架网络局限在几种固定的结构,可能会忽略掉一些性能优良的结构形式。
为了能够涵盖更多的悬架结构,本文将悬架结构的求解问题转化为求解正实鲁棒控制器问题,利用遗传算法结合LMI算法求解BMI(双线性矩阵不等式),以车身加速度均方根值为性能指标进行单目标综合,综合出一种以舒适性为导向的ISD悬架结构,采用多目标优化方法对其参数进行优化,对优化后的悬架进行仿真分析,与传统被动悬架进行对比,研究随机激励和脉冲激励下ISD悬架系统的动态响应和性能改善情况。
1 惯容器悬架系统网络综合
悬架网络综合与电子网络综合相对应,就是将悬架系统作为一个机械网络,根据路面输入和期望的车辆性能输出,先求出悬架的正实阻抗传递函数,然后用惯容器、弹簧和阻尼器三种基本元件物理实现出来。
1.1 以阻抗形式表示的ISD悬架单轮模型
在车辆悬架系统里面,为了保持车体高度,一定会有弹簧元件,因此我们可以将悬架单轮模型表示成如图1所示的形式,悬架结构分为已知部分和未知部分,已知部分为弹簧ks,未知部分Y(s)为弹簧、阻尼及惯容器任意组合的复域机械阻抗。

图1 悬架单轮模型Fig.1 Quarter-car model
其中,mu为非簧载质量;ms为簧载质量;zr为路面随机输入;zu为非簧载质量位移;zs为簧载质量位移;F为悬架未知结构部分产生的作用在簧上质量和簧下质量的力;kt为轮胎刚度。
动力学方程为:
(1)
输入变量为:w=[zrF]T
对应的状态方程为:
(2)
其中:
1.2 ISD悬架网络正实H2鲁棒控制器设计
则图1所示悬架的广义系统可表示如下:
(3)
为了能够实现所有种类的ISD被动悬架系统,把ISD悬架结构的求解问题转化为鲁棒控制问题,于是Y(s)就可以看成是一个鲁棒控制器K(s),将控制器写成状态空间形式[11]:
(4)
(5)
式中:xk为控制器的状态向量,yk代表控制器输出,uk代表控制器输入,Ak、Bk、Ck、Dk是待确定的正实控制器参数矩阵。
将广义悬架系统与鲁棒控制器结合起来形成增广的闭环系统:
(6)


(7)

(8)
式(7)和(8)均为双线性矩阵不等式。
1.3 ISD悬架系统网络综合
以车身加速度均方根值为优化目标,寻找侧重提高车辆乘坐舒适性的ISD悬架结构。
根据文献[12],传递函数Ty→z(jw)的H2范数可表示为:
(9)

(10)
车身加速度均方根值J1为
(11)
选取簧载质量m2=317.5 kg,非簧载质量m1=45.4 kg,轮胎刚度kt=192 kN/m,悬架弹簧刚度ks=18 kN/m,车辆以20 m/s的速度驶过不平度系数为G0=6.4×10-7m3/cycle的路面。在MATLAB环境下利用LMI工具箱结合遗传算法联合Path-following方法解BMI。取ks=18 kN/m,求得二阶控制器为:
(12)

由图2可以看到,控制器的二阶网络实现结构是两级串联结构:第一级由弹簧k1和阻尼器c1并联组成,与传统被动悬架相同;第二级由惯容器b和阻尼器c2并联组成。因c2的值非常小,可以考虑去除c2元件,从而得到新的结构,第二级仅由惯容器元件b组成。将新结构应用到车辆悬架系统,建立ISD悬架1/4车辆模型,如图3所示。

图2 控制器K(s)的二阶网络实现结构Fig.2 The realization structure of the second order controller

图3 ISD悬架1/4车辆模型Fig.3 Quarter-car model of ISD suspension
2 多目标规划确定ISD悬架参数
在传统的汽车设计中,悬架参数的确定是单独考虑车辆的乘坐舒适性或者以减小轮胎对路面动载荷为目的而进行的。本文为了对比分析ISD悬架与传统悬架的综合性能,发掘ISD悬架的潜在优势,综合考虑乘坐舒适性、轮胎动载荷和悬架动挠度三方面因素,采用多目标规划法确定ISD悬架结构参数[13]。
选择车身加速度均方根值J1为乘坐舒适性目标函数f1(x),轮胎动载荷均方根值J2作为轮胎接地性目标函数f2(x),悬架动行程均方根值J3作为影响车身姿态且与悬架结构设计、布置相关的目标函数f3(x),期望找到在悬架动行程和轮胎动载荷均方根值不大于传统悬架的情况下,侧重提高乘坐舒适性的ISD悬架参数。
该多目标规划问题的数学模型可以表示为:
minF(x)=(f1(x),f2(x),f3(x)),
s.t.LB≤xi≤UB
(13)
式中xi为决策变量,UB和LB分别代表其上下限,考虑大多数轿车的实际悬架参数,决策变量取值区间见表1。
假定车辆以v=20 m/s的速度行驶在不平度系数为G0=6.4×10-7m3/cycle的路面上,选择速度白噪声作为路面输入,通过设置相关参数利用NSGA-Ⅱ算法进行多目标优化,种群规模为100,交叉、变异概率取为默认值,进化60代,确定出侧重于提高乘坐舒适性的悬架参数,见表2。

表1 决策变量取值区间Tab.1 Limit values of the decision variables
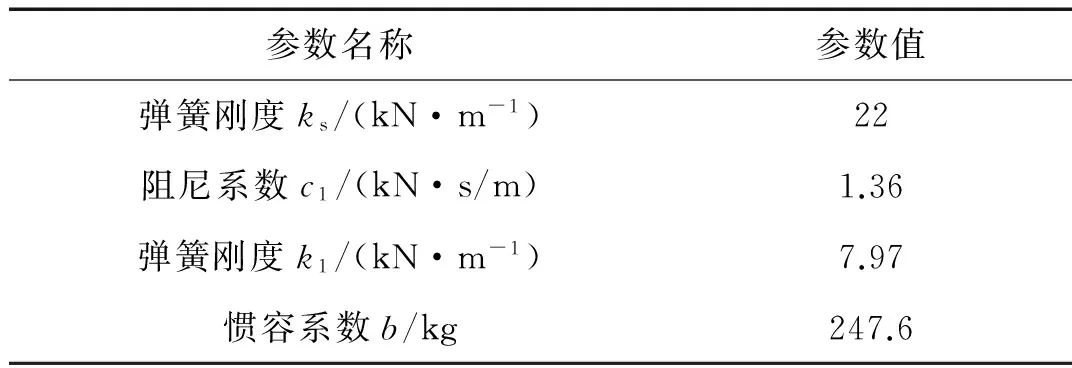
表2 ISD悬架参数多目标优化结果Tab.2 Multi-objective optimization results of the ISD suspension parameters
3 ISD悬架系统性能分析
为分析ISD 悬架性能,分别采用随机和确定性两种路面作为输入,以传统悬架为比较对象,分析系统响应情况。
3.1 随机响应
对于随机路面输入,取积分白噪声的时域表达式作为路面输入模型,其输入方程为
(13)
式中:w(t)为均值为零的Gauss白噪声;G0为路面不平度系数;u为车辆行驶速度。
车辆以u=20 m/s驶过不平度系数为G0=5×10-6m3/cycle的路面时,系统随机响应输出功率谱密度如图4所示,响应均方根值如表3所示。

表3 随机响应输出均方根值Tab.3 RMS values of random response outputs

图4 随机响应输出功率谱密度Fig.4 Power spectral density of random response outputs
由图4可以看出,在大于3 Hz的高频部分,ISD 悬架和传统悬架各性能指标的功率谱密度基本重合;在0~3 Hz 的低频部分,与传统悬架相比,ISD 悬架的车身加速度功率谱密度和轮胎动载荷功率谱密度明显下降,说明车身共振得到有效抑制,悬架动行程功率谱密度在2~4 Hz范围内也有所下降,仅在0~1 Hz范围有轻微恶化。由表3可知,与传统悬架相比,ISD 悬架的车身加速度均方根值下降了26.38%,轮胎动载荷均方根值下降了14.38%,悬架动行程均方根值下降了6.89%。可见,ISD 悬架明显改善了车辆乘坐舒适性。
3.2 脉冲响应
对于确定性路面输入,根据国标GB 5902—1986,取长坡形单凸块作为脉冲输入,速度输入方程为:
(15)
式中,u为车辆的行驶速度,Am=0.1 m,L=5 m。
车辆以u=10 m/s驶过由式(15)所表示的长坡形凸块时,系统时域响应输出如图5。
为了比较脉冲输入下2种悬架的动态性能,这里采用峰峰值(Peak-to-Peak,PTP)的评价方法进行定量计算,计算方法如下:
PTP=max(x(t)) -min(x(t))
式中:x(t)表示系统脉冲响应输出。
根据上式的计算方法对图5所示的响应输出数据进行峰峰值计算,脉冲响应输出的峰峰值见表4。
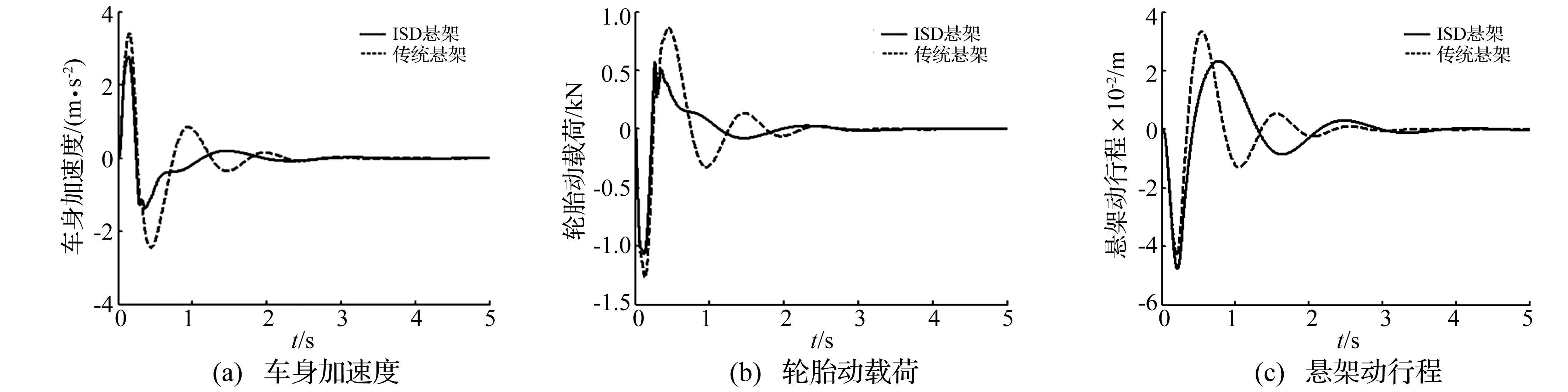
图5 系统脉冲输入响应Fig.5 Pulse input responses of system
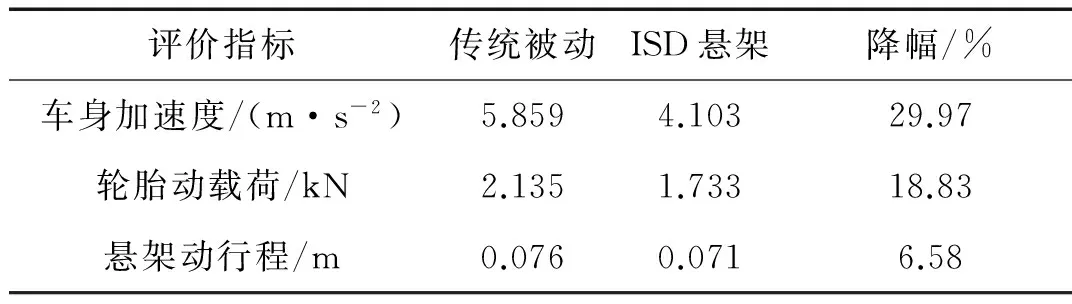
评价指标传统被动ISD悬架降幅/%车身加速度/(m·s-2)5.8594.10329.97轮胎动载荷/kN2.1351.73318.83悬架动行程/m0.0760.0716.58
结合图5和表4可知,与传统被动悬架相比,ISD悬架的车身加速度峰峰值减小了29.97%,轮胎动载荷峰峰值减小了18.83%,悬架动行程峰峰值减小了6.58%,可见,ISD悬架明显改善了车辆的乘坐舒适性。图5还显示,与传统被动悬架相比,ISD悬架响应输出的振荡次数少,调节时间短,响应输出能够迅速复位,表明其具有良好的动态性能。
4 结 论
(1) 采用网络综合的方法,可以从众多未知的组合中求解出目标性能最佳的ISD悬架系统,这种求解方法具有一般性。
(2) ISD 悬架有效抑制了车辆低频垂直振动,改善了车辆乘坐舒适性;同时,ISD 悬架系统稳态响应时间短,响应输出超调量小,具有良好的动态性能。
[1] SMITH M C. Synthesis of mechanical networks: the inerter[J]. IEEE Transactions on Automatic Control, 2002, 47(10): 1648-1662.
[2] SMITH M C.Performance benefits in passive vehicle suspensions employing inerters[J].Vehicle System Dynamics, 2004, 42(4): 235-257.
[3] 陈龙,杨晓峰,汪若尘,等.改进的ISD 三元件车辆被动悬架性能的研究[J].汽车工程,2014,36(3):340-345. CHEN Long,YANG Xiaofeng,WANG Ruochen,et al. A study on the performances of vehicle passive suspension with modified inerter-spring-damper three-element structure[J]. Automotive Engineering, 2014,36(3):340-345.
[4] ZHANG Xinjie, AHMADIAN M, GUO Konghui.On the benefits of semi-active suspensions with inerters[J].Shock and Vibration, 2012, 19(3): 257-272.
[5] EVANGELOU S, LIMEBEER D J N, SHARP R S, et al. Control of motorcycle steering instabilities: passive mechanical compensators incorporating inerters[J]. IEEE Control Systems Magazine, 2006, 26(5): 78-88.
[6] CHENG Weichen. The applications of inerter to building suspension[D]. Taipei: National Taiwan University, 2007.
[7] WANG Fucheng, LIAO Minkai, LIAO Bohuai, et al. The performance improvements of train suspension systemswith mechanical networks employing inerters[J]. Vehicle System Dynamics, 2009, 47(7):805-830.
[8] WANG F C,CHAN H A.Mechatronic suspension design and its applications to vehicle suspension control[J].Proceedings of the 47th IEEE Conference on Decision and Control Cancun,2008,16(5):3769-3774.
[9] SCHEIBE F,SMITH M C.Analytical solutions for optimal ride comfort and tyre grip for passive vehicle suspensions[J].Vehicle System Dynamics,2009,47(10):1229-1252.
[10] PAPAGEORGIOU C, SMITH M C. Positive real synthesis using matrix inequalities for mechanical networks: application to vehicle suspension[J]. IEEE Transactions on Control System Dynamics, 2006, 14(3): 423-435.
[11] 廖柏淮.被动式机械系统之网路实现——惯质与线性矩阵不等式在火车悬吊系统上之应用[D].台北:国立台湾大学,2006.
[12] 俞立. 鲁棒控制——线性矩阵不等式处理方法[M]. 北京:清华大学出版社,2002.
[13] SHIRAHATT A, PRASAD P S S, PANZADE P, et al.Optimal design of passenger car suspension for ride and road holding [J].Journal of the Brazilian Society of Mechanical Sciences and Engineering,2008,30(1): 66-76.
The network synthesis and characteristics analysis of an inerter-spring-damper suspension system
NIE Jiamei, ZHANG Xiaoliang, CHEN Guotao
(School of Automobile and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China)
In order to improve the ride comfort of vehicles, an inerter was applied to a vehicle suspension system to build “inerter-spring-damper” (ISD) suspension. The structure of the ISD suspension was determined by using a network synthesis method. The impedance transfer function of the ISD suspension was obtained with the root-mean-square (RMS) of the vehicle body acceleration as the ride comfort index. It could be physically realized by using passive elements such as inerter, spring and damper. A quarter car vehicle model was built. By using the multi-objective optimization method, structural parameters of the ISD suspension were optimized. On this basis, the performance of the suspension system was verified under random and pulse input. The results show that in contrast to conventional suspension, the proposed suspension has a better dynamic performance. The RMS of body vertical acceleration is reduced about 26.83%. The ISD suspension can suppress vertical vibration of vehicle body within the frequency of 1-3 Hz and improve the ride comfort of vehicles.
suspension;inerter;network synthesis;multi-objective optimization;ride comfort
国家自然科学基金项目(51405202);江苏省自然科学基金项目(BK20130521);江苏大学高级人才启动基金项目(09JDG054);中国博士后科学基金项目(2015M570408);江苏省“六大人才高峰”项目(2013-JNHB-001)
2015-07-09 修改稿收到日期:2015-12-30
聂佳梅 女,博士,讲师,1981年9月生
张孝良 男,博士,副教授,1979年1月生
U463.33
A
10.13465/j.cnki.jvs.2016.24.019
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
机械设计与制造(2022年5期)2022-05-19
载人航天(2021年5期)2021-11-20
现代仪器与医疗(2021年2期)2021-07-21
汽车零部件(2019年10期)2019-11-13
汽车工程(2019年9期)2019-10-10
北京汽车(2016年6期)2016-10-13
消费者报道(2016年3期)2016-02-28
汽车实用技术(2015年8期)2015-12-26
汽车零部件(2014年6期)2014-09-20
