
基于三针驱动器的盲文学习机
2017-01-04 05:26:35裴红星华怡帆
郑州大学学报(理学版) 2016年4期
裴红星, 华怡帆
(郑州大学 物理工程学院 河南 郑州 450001)
基于三针驱动器的盲文学习机
裴红星, 华怡帆
(郑州大学 物理工程学院 河南 郑州 450001)
设计了一款单行显示的盲文学习机,通过语音模块播放相应的读音辅助自学,显示模块显示当前学习内容,供视力正常人协助辅导.根据盲文的触点排列设计了三针驱动器,可以在步进电机的控制下沿轨道自左向右移动,按照盲文编码规则逐列驱动触点形成相应凸点,从而大大减少驱动机构的数量,提高了系统电磁兼容性和稳定性.提出了一种新型凸点产生装置:凹凸开关,包括套筒、底座及顶杆三部分,能在三针驱动器的作用下,使凹点和凸点交替切换.该装置为纯机械结构设计,掉电保持原状态,独特的复位层可以实现一键全复位.
三针驱动器; 凹凸开关; 机械保持; 自动复位; 盲文触点
0 引言
中国是世界上盲人最多的国家,截止到2012年10月,我国有1 350万视力残疾人,550多万盲人[1].盲人获取知识和技能的渠道比较单一,一般是通过盲文书籍或专用设备.盲文是专门为盲人设计的,依靠触觉感知文字,由法国人路易·布莱尔于1842年创造,左右两列共6点组成一方,通过每个点的凸起或不凸起的63种组合(没有6个点都不凸起),来代表盲文的声母、韵母、数字、英文字母等,通过组合不同的盲文拼音组成不同的发音[2].按照这种规则制作盲文书籍或专用设备供盲人阅读.
无论是通过盲文书籍还是专用设备进行阅读,都需要先掌握不同的凸点组合所代表的发音和含义.传统的学习方法是由教师讲授盲文教学书籍中不同凸点组合的发音及含义,盲人通过触摸书籍凸点位置记忆并掌握凸点组合.传统盲文书籍由盲文打印机在铁皮上冲压出凸点制成印版,使用印版对牛皮纸加压制成盲文书籍[3].从原材料(上等木材)到制作工艺,盲文书籍的成本都较普通书籍高很多[4].盲文的学习是不断触摸按压凸点,并记忆凸点组合的过程.出于人体本能的反应,初学者在不熟练的情况下,会不由自主地加大按压力度以得到更强烈的触摸反馈,进而造成凸点磨损甚至消失,对书籍的损耗很大.而盲文学习专用设备(点显器或点位机)可以通过一定的操作显示出相应的盲文凸点供盲人学习和阅读,其凸点为硬质材料,克服了纸质书籍在学习和阅读过程中易损耗的缺点.如清华大学自动化系语言文字信息处理研究中心研制的点显器[5],可以将电脑上的文字信息通过读屏软件翻译成盲文后自动显示出来,盲人可以用手触摸盲文单元上变化的盲文点字来获取电脑屏幕上显示的信息,此机器简单易学,盲人朋友易于接受.南京特殊教育职业技术学院的张居晓教授等提出了一种基于电极的盲文学习机[6],通过低中频高压电子脉冲,产生电刺激感觉识别盲文,但这种方法对人体有一定的伤害.韩国设计师Seon-Keun Park等用电子活性聚合物(EAP)设计了盲文学习机,以EAP受到电刺激时产生的形变实现盲文凸点的显示,此学习机体积小,便于盲人携带.文献[7]提出用碳纳米管橡胶混合物作为驱动元件,在灯光照射下发生形变组成布莱尔点,此学习机结构复杂,不易使用.文献[8]提出了用形状记忆合金(SMA)和磁性弹簧锁来实现盲文的显示,此学习机所用的SMA为智能高分子材料,价格昂贵.
这些盲文学习设备,是以不同的技术手段达到使不同材料呈现预定凹凸点的目的,其价格与科技含量和显示的方数成正比,一般售价为10 000~30 000人民币,对于普通的盲人家庭或绝大部分的盲人学校来说难以大范围普及,在很大程度上仅用于研究和展示.本文研制的盲文学习机是将每个盲文按照一定的规则编码,单片机根据编码控制电机的转动和三针驱动器的通电或断电,进而显示相应的盲文凸点,盲人通过触摸凸点学习盲文字.由于采用普通的元器件和材料,因此成本可以大大降低,对于普及盲文教育以及减轻家庭负担具有重要意义,同时还可以降低盲文书籍的印刷数量,在一定程度上保护生态环境,具有良好的经济和社会效益.
1 系统的总体设计方案
盲文学习机原理框图如图1所示.通过按键选择学习内容,由步进电机控制三针驱动器,按照盲文编码规则,使凹凸开关相应点位凸起.语音模块播放相应的读音,辅助自学,LCD显示当前学习内容,供家长等视力正常人协助辅导.
盲文学习机每次可以显示5个盲文字,每个字由12个盲文点(2方)构成,共60个点位,其机械结构如图2所示,包括触摸板、凹凸开关、第一层固定板、复位板、第二层固定板、三针驱动器、步进电机、正齿轮、直齿条和底板.触摸板同时作为机壳的壳盖,第一层固定板用于固定凹凸开关,复位网用于使所有的凸点复位,均位于触摸屏下方,第二层固定板矩形的中空限制三针驱动器只能左右移动,底板凹槽作为三针驱动器左右移动的轨道.
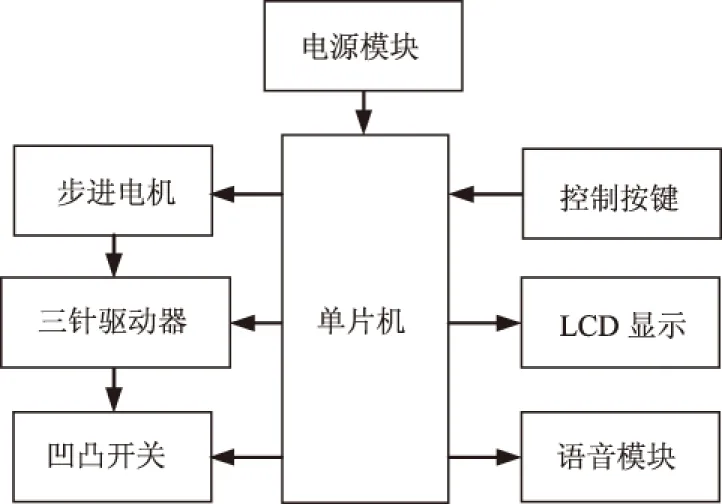
图1 盲文学习机原理框图Fig.1 Block diagram of braille learning machine principle
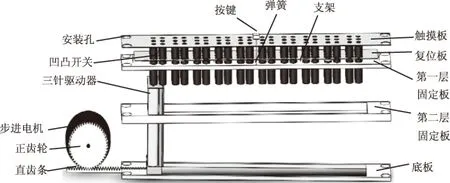
图2 盲文学习机的机械结构Fig.2 The mechanical structure of braille learning machine
盲文学习机工作过程如下:单片机根据学习内容完成盲文编码,由步进电机驱动三针驱动器,沿第二层固定板轨道自左向右移动,每移动一列(包含3个点位),按照盲文编码驱动凹凸开关相应点位凸起,直至20列全部完成.学习完毕或更换学习内容时,单片机控制步进电机,使三针驱动器自右向左移动,依次驱动每列中的凸点复位,然后再进行下一步操作.
2 凹凸开关设计
凹凸开关如图3所示.套筒内部均匀分布3个相同规格的楔子,与底座的斜齿和顶杆的斜齿配合,共同形成凸点,楔子中间留有凹槽供复位使用,如图3(a)、(b)所示.底座上半部分均匀分布3个相同规格的向上的斜齿,用来与顶杆的斜齿契合推动顶杆向上运动,下部的底盘与套筒的底盘契合,限制底座运动轨迹,如图3(c)所示.顶杆的圆周均匀分布3个相同规格的向下的斜齿,与底座的斜齿和套筒内的楔子契合,触点穿过点位孔就可形成凸点,如图3(d)、(e)、(f)所示.

图3 凹凸开关Fig.3 Concave and convex switch
套筒、底座和顶杆相互配合形成凸点和凸点消失的过程如图4所示.为了清楚地显示三者的配合,套筒的外壳未显示.第一状态即起始状态,顶杆和底座卡在套筒内,底座斜齿和顶杆斜齿相互配合,如图4(a)所示;第二状态,底座顶起顶杆,使顶杆的第一个斜齿高过楔子后底座落下,由于顶杆的第一个斜齿和楔子相互契合,故顶杆顺时针旋转下落,如图4(b)所示;第三状态,底座落下,顶杆的斜齿固定在套筒的楔子上,高出触摸板0.3 mm,顶杆穿过触摸板的点位孔,凸点形成,如图4(c)所示;第四状态,底座顶起顶杆,使顶杆的第二个斜齿高过楔子后底座落下,由于顶杆的第二个斜齿与楔子相互契合,故顶杆顺时针旋转下落,如图4(d)所示;第五状态,底座落下,顶杆顺时针下落,二者的斜齿相互配合,凸点消失,回到第一状态,如图4(a)所示.

图4 凸点形成和消失的过程Fig.4 Process of convex point forming and disappearing
3 复位层设计
每次需要学习新的内容,或者由于停电及其他问题造成盲文点凸起混乱时,可以按下复位键复位.复位层主要包括复位板、杠杆机构等.
复位板包含有60个与套筒相对应的小孔,小孔中有3个均匀分布的规格相同的卡爪,卡爪插在套筒楔子的U型槽中,如图5所示.

图5 复位板Fig.5 Reset board
杠杆机构主要由两个规格相同的杠杆架、托架、支架和一个按键机构组成,其中支架和托架固定在第一层固定板上,杠杆架的两端伸出两个圆杆,其与支架的两个固定环配合,保证学习机在倒立的情况下杠杆架不会下落,按键机构的竖直杆插进第一层固定板中,水平杆与两杠杆架靠中间的一端接触,按键按下,杠杆架两边翘起顶起复位板,复位板被抬高.由于按键机构竖直杆下方安装有弹簧,所以按键机构可以在弹力的作用下自动复位.
4 三针驱动器的设计
采用三针驱动器作为驱动机构推动底座形成凸点.三针驱动器主要由线圈、铁芯、衔铁和推杆等组成,其中推杆和衔铁为一体,推杆可以在衔铁内部上下运动.线圈通电后,其内部产生磁场,铁芯被磁场磁化,吸引衔铁向上运动,进而推杆向上运动;线圈断电后,磁场消失,铁芯退磁,衔铁由于自身重力向下运动,推杆落下.
镍锌铁氧体是一种软磁性材料,主要成分有Fe2O3、NiO、ZnO等,它的居里温度较高,饱和磁通密度也高至0.5 T,具有较低的传输功耗[9],密度为4.6~5.0 g/cm3,相对磁导率为10~1 000,其应用范围比较广.本文用其作为三针驱动器的衔铁和铁芯材料.
1) 推力的计算
底座和顶杆需要靠三针驱动器的推力才可以形成凸点,故需要计算出底座和顶杆的重力.根据顶杆和底座的结构可以计算出体积,进而计算出质量和重力.
体积计算如下:底座的体积V11max= 7.133 698 mm3,顶杆的体积V12max= 12.009 719 mm3,故V1max=V11max+V12max= 19.143 417 mm3.
由于硬质聚氯乙烯材料(PVC)不含柔软剂,因此柔韧性好,易成型,不易脆,无毒无污染,保存时间长,具有较大的开发应用价值.硬质PVC的密度为1.38~1.43 g/cm3,机械强度高,化学稳定性好,使用温度范围一般为-15~55 ℃.顶杆和底座材质选用不透明的硬质PVC.
总重力计算如下:m1max=V1maxρ1max= 27.375 08610-3g,G1max=m1maxg=0.273 751 N.衔铁的体积V2=1.436 336 mm3,将ρ2max=5.0 g/cm3代入,可得m2max=V2ρ2max=7.181 68110-3g,G2max=m2maxg=0.071 817 N,则总重力G=G1max+G2max= 0.345 568 N.
在使用过程中,学习机可能放置于倾斜的状态,所以不可避免地会产生摩擦等情况,为了保证工作的稳定性,三针驱动器的推力必须大于凹凸开关和衔铁等的重力,这里取需要的推力为:F=Gk= 0.933 05 N1 N,其中G为重力,k为校正系数,取k=2.7.
2) 磁感应强度的计算
作用在被磁化了的铁磁物体上的电磁吸力可以表示为
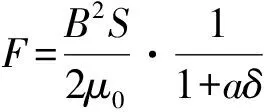
式中:F为电磁吸力(J/cm);B为磁感应强度(Wb/cm2);S为磁极表面积(cm2);μ0为空气导磁系数,其值为1.25×10-8H/cm;a为磁通不均匀分布修正系数,经验值为3~5;δ为气隙长度.则磁感应强度为

(1)
三针驱动器产生的推力就是其产生的电磁吸力,μ0=1.25×10-8H/cm,S=0.003 6 cm2,a=4,F=1 N,因为推杆顶出2 mm,凸点结构即可实现凸出需求,故取δ=0.2 cm,代入式(1),可得B=1.995 T.
通电空心线圈中产生的磁感应强度为
B0=B/μr,
(2)
式中:μr为镍锌铁氧体的相对磁导率,取值为120.将B=1.995 T,μr=120代入式(2),可得不加镍锌铁氧体的空心线圈中产生的磁感应强度B0=1.662 5×10-2T.
3) 驱动电压的计算
设线圈匝数为N,绕线宽度为L,则总长为2L,绕线内半径为R1,绕线外半径为R2,铜丝直径为d.根据多层密匝螺线管模型[10-11],可计算线圈匝数为

(3)

故绕线阻值为

(4)
式中:R为绕线阻值(Ω);ρ为铜的电阻率(Ω·m);s为铜丝的横截面积(m2).
假设线圈两端的电压为U,则线圈内部的电流为

采用的线圈直径d=0.000 1 m,R1=0.000 8 m,R2=0.001 6 m,L=0.01 m,ρ=1.78×10-8Ω·m,代入式(3)和(4)得:N=1 600,R=27.34 Ω.
连续电流分布时的电流密度为

(5)
轴向磁感应强度为

(6)
径向磁感应强度为

表面切向磁感应强度为

轴心线上磁感应强度为
空心螺线管的轴向磁感应强度随着x的增加逐渐变小,径向磁感应强度随着y的增加而增大,但是轴向磁感应强度要比径向磁感应强度强约100倍以上,故只考虑轴向磁感应强度,即B0=Bx.
设点M(x,y)为空心螺线管内部的任意一点,M离中心点的距离越远,磁感应强度越小.设计的三针驱动器,当x=7.3 mm,y= 0.6 mm时,M与中心点距离最远.将x=7.3 mm,y=0.6 mm,R1=0.000 8 m,R2=0.001 6 m,N=1 600,L=0.01 m,B0=1.662 5×10-2T代入式(5)和(6)得:j=108I,I=0.119 A,则线圈两端的电压为:U=RI=3.26 V.
5 结语
设计的盲文学习机可以显示5个汉字,按照盲文编码规则,每个汉字需要用2方(12个点)表示,如果每个触点都使用单独的驱动机构(步进电机或继电器等),则5个汉字共需要60个驱动机构,盲文触点间距按要求为2.8 mm,驱动机构必须排列非常紧密才能达到要求,而紧密排列的结构易造成驱动机构相互之间的强烈干扰.设计的三针驱动器只包含3个驱动部件,通过步进电机控制其位移以扫描的方式完成对相应触点的驱动,与每个触点使用单独驱动机构相比,系统响应速度有所降低,但对盲文学习过程的影响可以忽略.
设计的凹凸开关为纯机械结构,凸点一旦形成,驱动机构不再工作,降低了系统的功耗,克服了继电器因衔铁长期处于工作状态所产生的磁滞老化而造成的失效现象,提高了系统的稳定性和使用寿命.同时,学习机在掉电的情况下可以一键复位,方便快捷.学习机采用通用元器件,价格低廉,易于控制整机成本,有利于推广使用.
[1] 刘一.国际盲文日:我国盲人就业人数增加 领域拓宽[EB/OL].(2012-10-15)[2016-01-10].http://news.cntv.cn/program/xwlb/20121015/106594.shtml.
[2] 张蕾.空心点盲文印刷技术[J].印刷技术,2009(13):47-49.
[3] 王灿才.浅谈盲文印刷[J].今日印刷,2007(9):51-53.
[4] 侯夷.新中国盲文出版事业探析[D].开封:河南大学,2007.
[5] 好搜百科.点显器[EB/OL].(2012-10-18)[2015-5-19].http://baike.so.com/doc/3824874.html.
[6] 张居晓,胡作进,王乃和.电极式盲文点字显示器:201310151142.3[P],2013-04-27.
[7] CAMARGO C J,CAMPANELLA H,MARSHALL J E,et al.Batch fabrication of optical actuators using nanotube-elastomer composites towards refreshable braille displays[J].Journal of micromechanics and microengineering, 2012,22 (7):1-9.
[8] HAGA Y,MAKISHI W,IWAMI K,et al.Dynamic braille display using SMA coil actuator and magnetic latch[J].Sensors and actuators A:physical,2005,119(2):316-322.
[9] 关小蓉,张剑光,朱春城,等.锰锌、镍锌铁氧体的研究现状及最新进展[J].材料导报,2006,20(12):109-112.
[10]魏群.螺线管磁场分布特征[J].长春工业大学学报,2003,24(3):68-70.
[11]黄刘宏,李跃波,丁世敬,等.低频强磁场发生线圈电感系数的计算与测试[J].河南科技大学学报(自然科学版),2014,35(6):52-56.
(责任编辑:孔 薇)
Braille Learning Machine Based on Three-needle Drive
PEI Hongxing, HUA Yifan
(SchoolofPhysicsandEngineering,ZhengzhouUniversity,Zhengzhou450001,China)
The braille learning machine which could display single line was designed, the voice module played corresponding pronunciation to assist self-study,the display module displayed the current learning content which could help sighted person for tutorship.Three-needle drive was devised according to the contact arrangement of braille, step motor could control it move along the rail from left to right.Three-needle drive drived contact forming corresponding convex point per column in accordance with the braille encoding rules,which greatly reduced the number of driving mechanism and improved the electromagnetic compatibility and stability of system.A new type of convex point generating device called concave and convex switch was proposed,which included sleeve, base and mandrill,it could exchange the concave points and convex points alternately with the action of three-needle drive.It was made of pure mechanical structure and could resume to the original state when power supply cut.Unique reset layer could achieve fully reset only through one button.
three-needle drive; concave and convex switch; machinery retention; automatic reset; braille point
2016-08-13
裴红星(1975—),男,河南安阳人,副教授,主要从事电子技术研究,E-mail:phxlee@zzu.edu.cn.
裴红星,华怡帆.基于三针驱动器的盲文学习机[J].郑州大学学报(理学版),2016,48(4):80-85.
TP23
A
1671-6841(2016)04-0080-06
10.13705/j.issn.1671-6841.2016677
猜你喜欢
电子与封装(2023年11期)2023-12-09 08:10:00
舰船电子工程(2023年4期)2023-08-04 05:45:26
中国特种设备安全(2021年5期)2021-11-06 05:09:50
中国民间疗法(2021年16期)2021-11-04 08:13:30
模具技术(2021年5期)2021-10-13 09:00:58
激光与红外(2021年6期)2021-07-23 09:27:28
锻造与冲压(2020年13期)2020-07-09 06:56:24
船海工程(2015年4期)2016-01-05 15:53:34
中国中医药现代远程教育(2014年11期)2014-08-08 13:23:44
参花(上)(2013年6期)2013-05-30 17:20:55
