基于雷达影像的船舶转向角计算方法*
2016-12-30 01:46蒋仲廉初秀民
武汉理工大学学报(交通科学与工程版) 2016年6期
钟 诚 蒋仲廉 初秀民 罗 翊
(武汉理工大学智能交通系统研究中心1) 武汉 430063) (国家水运安全工程技术研究中心2) 武汉 430063) (武汉理工大学物流工程学院3) 武汉 430063)
基于雷达影像的船舶转向角计算方法*
钟 诚1)蒋仲廉1, 2)初秀民1, 2)罗 翊3)
(武汉理工大学智能交通系统研究中心1)武汉 430063) (国家水运安全工程技术研究中心2)武汉 430063) (武汉理工大学物流工程学院3)武汉 430063)
航行状态信息的实时、精确感知是实现船舶姿态控制与自主航行的基础与前提.采用Otsu算法对船载雷达图像进行预处理,通过霍夫变换获取雷达图像直线分量,求解连续图像间的旋转角度差值,提出了一种基于雷达影像的船舶转角度计算新方法.经实验数据验证,由此获得的船舶转向角误差不随时间而叠加,且最大误差在4%之内.基于雷达影像的船舶转向角计算方法可为其航行制导控制、算法改进提供支撑.
雷达影像;转向角;预处理;霍夫变换
0 引 言
实时精确感知航行姿态信息,包括航向角(yaw)、横倾角(roll)和纵倾角(pitch)等,是实现船舶姿态控制与自主航行的前提.目前,国内外关于船舶航行姿态信息的感知主要通过磁传感器、惯导系统、GPS系统或者视觉成像传感器获取[1-2].高精度惯性导航传感器可实现船舶状态信息的连续测量,但由微机电系统(MEMS)陀螺仪所获取的载体角运动和线运动信息误差存在随时间累积发散的特点[3],非平稳随机噪声一定程度上制约了信息精度[4];GPS航行状态感知精度受制于基线长度、天线布局和信号强度等因素,多用于大中型水面舰艇[5-7];基于视觉成像传感器的工作原理是,解算连续拍摄图像中标志点模板的姿态变化(如单/双目视觉姿态判定方法[8-9]),获取航行姿态信息.
船载雷达是船舶安全航行的常规设备之一,可在线实时获取通航环境信息,辅助实现船舶的导航控制、定线航行、自主避碰等.基于高分辨率雷达回波影像的科学研究,已在海浪观测、溢油监测、船舶目标检测与跟踪等领域广泛开展[10-17].近年来,小波变换、霍夫变换、边缘检测等图像处理技术在雷达影像上得到了广泛应用.陈鹰等[18]将小波变换用于雷达影像的边缘检测,以实现图像的匹配及校准;Liu等[19]通过霍夫变换方法,实现了雷达影像中岸线桥梁目标的自动提取,为雷达影像与电子航道图的信息融合奠定了基础;针对合成孔径雷达(SAR)影像,符思涛等[20]利用投影面积归一化和极化方位角移动补偿技术对地形引起的辐射畸变进行纠正;程江华等[21]采用形态学变换结合多阈值Otsu算法,实现了各种外界干扰下的道路交叉口检测和识别方法.
文中借助Lowrance 4GTM雷达影像(见图1),采用Otsu算子、霍夫变换等图像处理技术,提出了一种船舶偏向角计算方法.通过与船舶雷达数据对比,验证了方法的可行性.船舶偏向角算法可与船舶其他传感器信息融合,实现船舶航行状态信息的精确控制与感知,具有较强的可拓展性.

图1 船载雷达图像
1 转向角计算方法
船舶航行或转向时,连续雷达回波图像不仅包含航行角度上的旋转差异,扫描内容也发生了变换.仿射变换、角点特征等常用的图像旋转角度计算方法,在连续雷达图像分析中并不适用.文中采用形态学的方法对雷达影像进行预处理,对预处理后的图像进行霍夫变换提取其直线分量,通过最大直线分量间的角度偏转确定来得到船舶的转向角.其流程图见图2.
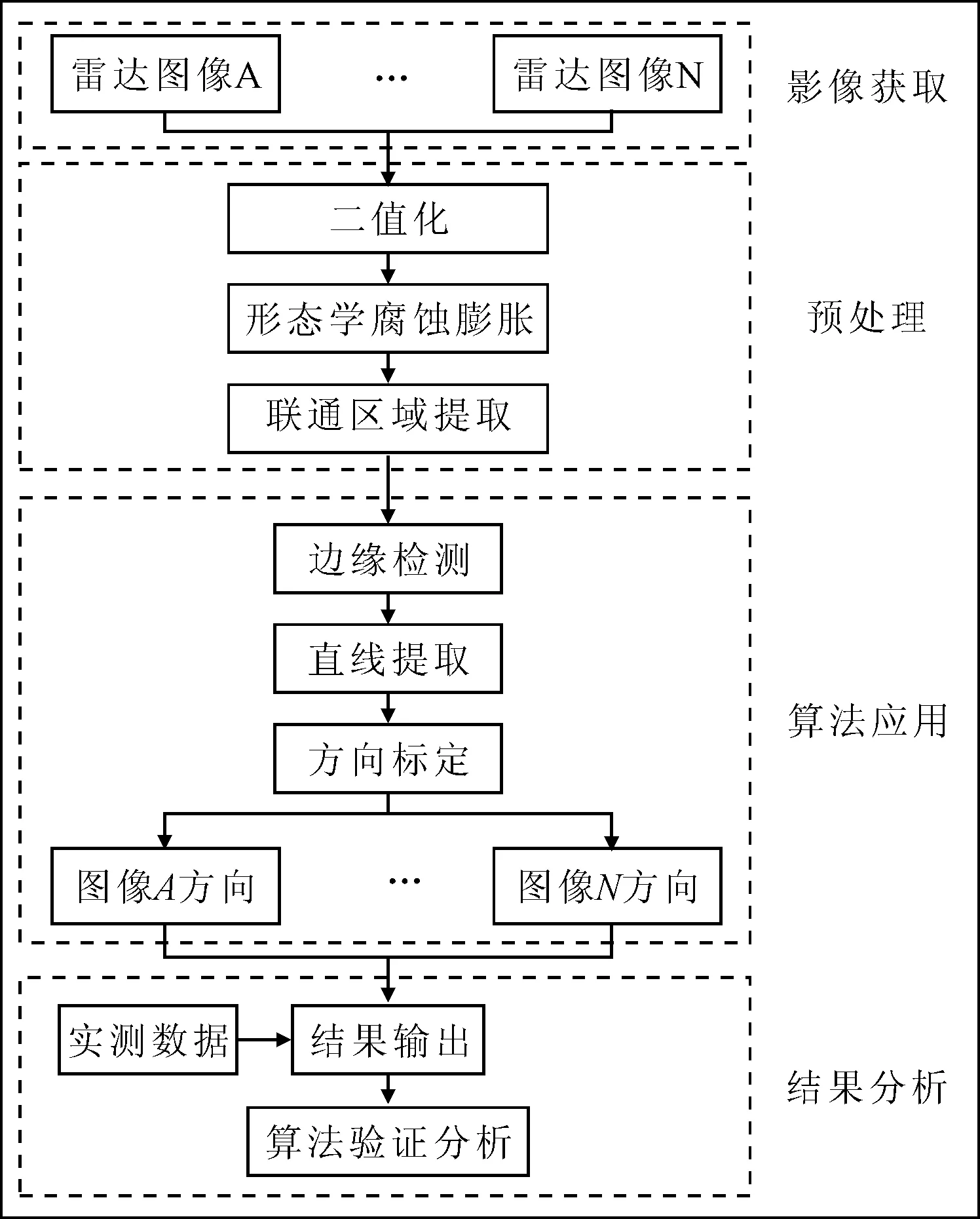
图2 船舶偏转角计算流程图
2 雷达影像预处理技术
考虑到中段截取的雷达影像中存在着大量的干扰信息,文中采用Otsu算法、图像腐蚀和膨胀、连通区域提取,实现中段雷达图像的预处理.
2.1 图像二值化
采用自适应Otsu算法对图像进行二值化操作.Otsu算法是一种基于自动确定阈值的图像分割方法[22].该方法将图像分为2个(前景、背景)图像;根据灰度出现概率计算最佳的阈值,适用于图像灰度多峰值的情况,且操作简单.文中借助Otsu算法实现了雷达图像的二值化,见图3.

图3 二值化处理前后雷达图像对比
2.2 图像的腐蚀和膨胀
腐蚀和膨胀是数学形态学中的基本操作,其目的是滤除噪声,实现图像分析和识别;而后进行开(open)、闭(close)、击中击不中运算(hit or miss transformation,HMT).在执行腐蚀和膨胀运算后,边界直线更为平滑,同时图像中的细小缝隙也会被填充满,为后续连通区域的提取奠定基础.
2.3 连通区域提取
连通域是指在一定数量的像素在特定的关联度上可以划归为统一区域的像素[23].连通准则主要有3种:4邻接、8邻接及混合邻接,具体方法为:分析每个前景像素,如果其四周有与之灰度相同的像素,则判定四周与检测点相同的像素处于同一个邻域,进行标记;之后,将统计的连通域进行排序,保留较大、删除较小联通域,见图4.

图4 不同阈值雷达影像连通区域提取结果
基于形态学的雷达影响预处理方法具有算法简单、易于实现等特点.对于雷达影像中的目标识别,设计不同的结构元素,开闭运算的选择顺序至关重要.赵松等[24]提出了结合小波变换和形态学的去噪方法,实现了雷达图像的去噪处理;王海虹等[25]建立了基于形态学的图像边缘检测方法,实现了对激光成像雷达图像的边缘提取.文中采用了4领域的开闭运算方法,在平滑区域边界的同时有效剔除区域内空洞;在形态学处理的基础上,提取图像中的连通区域,并剔除结果中像素面积较小的噪声区域.
3 雷达影像转向角计算方法
在雷达影像预处理的基础上,采用霍夫变换(Hough transform)进行直线提取;基于直线提取结果,对雷达影像进行方向标定;最后,由雷达影像序列的方向差异获取船舶的转向角.
3.1 Canny算子边缘检测
相对于其他边缘检测方法,Canny算子边缘检测的优越之处在于灵活的阀值选择,允许采用不同的阈值对同一副图像的明显与非明显边缘进行检测,进而自动判定明显与非明显边缘相连才将弱边缘包含于图像之中[26].采用Canny算子进行检测不致于丢失虚弱边缘的信息,较易检测出真正的弱边缘,且具有较强的抑制噪声能力.总体上,尽管部分边缘被平滑造成了边缘的部分丢失,但基于Canny算子的边缘检测方法能准确地提取出劣化图像边缘,实用性较强,见图5.
3.2 霍夫变换
霍夫变换由于其良好的抗噪声性能,以及对部分遮盖现象的不敏感等特性,在模式识别领域中得到广泛的应用.例如,直线检测、圆或椭圆的检测、任意形状区域的边缘提取、二维或三维运动参数的估计等[27].其基本原理是将直线从x-y坐标轴空间转换为a-b坐标轴空间形成峰值,从而将检测任意形状的问题转化为统计峰值问题.通过对参数的累加再进行反变换,以实现平面域线段及形状区域的检测.
3.3 方向标定
在雷达影像中,由于噪声的影响、自然岸线的弯曲,一条线段会断裂为多条不连续线段.因此,对提取到的相近短线段进行合并处理;当合并得到的线段长度较短(小于阀值)时,舍弃线段.图6a)为直线合并的距离阀值10,直线长度阈值10时的提取结果.将直线长度阀值提升至20,30,40时,结果分别见图6b)~d).对比上述结果可知:当长度阀值过大时,容易造成直线信息丢失,过小则会增添不必要的冗余直线信息.将合并距离阀值提升至20,30,40时,直线提取结果见图6e)~h),6i)~l),6m)~p).

图6 不同阀值下雷达图像直线提取结果
对于已获取的直线线段,统计线段方向信息及长度信息,将统计结果中的具有最长分量的方向标定为图像方向,见图7.实线①为最长直线分量,②为可能直线分量.

图7 雷达图像方向标定
4 实验结果及分析
以武汉长江二桥处实测船载雷达所测(型号:Lowrance 4GTM)影像为验证素材,采用上述方法计算船舶航行偏向角,并与实际雷达数据进行对比,分析误差来源,验证方法可行性.4个雷达图像采集点分布于长江二桥上、下游,每个采集点选取18张图像(共计72张雷达图像)作为算法验证素材;图像采样间隔为2 s,雷达转向速率为5°/2 s.
合并相邻直线、直线提取中长度阀值选定对于最终方向标定存在影响.表1列出了长度阈值30时的直线提取部分结果;图8为不同阀值下船舶转向角计算值随时间的变化过程.实验分析表明,当阀值取选取低于20时,雷达图像中出现较多噪声线段,试验结果与真实转向角差值过大;当阀值选取高于40时,图像中形成的点簇较少,无法获取足够有效信息;当阀值选取为30左右时,效果较为理想,船舶转向角计算结果与实际结果较为吻合,且最大误差在0.2°(4%)之内.

图8 不同阀值下船舶偏转角计算值随时间变化过程

线段起点线段终点方向/(°)霍夫空间方向[1187,1168][1209,1190]-45 13[1060,741][1152,771]-72-377[1326,706][1324,749]31360[1305,1111][1302,1161]31360[1136,1097][1183,1098]-89-1076[787,739][816,731]74926[1084,654][1139,638]74926[1088,713][1085,750]41134[1066,1032][1062,1091]41134[582,793][634,790]86831
雷达影像采集过程受波、流扰动作用影响;其次,雷达图像预处理、直线提取中引起的误差也不可避免.由实验结果分析可知:长度阈值等于30时,平均误差值约0.04°(小于1%,标准差为0.18),船舶偏向角算法精度较高.
5 结 束 语
基于船舶船载雷达影像,采用图像处理的方法,实现了雷达图像的预处理、雷达方向标定,提出了一种船舶航行偏向角计算新方法,并与船舶实际转向角进行了算法验证和误差分析.实验结果表明,算法获得的船舶偏转角计算值与实际数据较为吻合;最大误差为0.2°(4%范围内),且不随时间累积.针对Lowrance 4GTM雷达扫描图像,通过选取不同霍夫变换阀值,分析了船舶转向角计算值的差异;经过取值对比,将直线长度阀值取为30.对于不同类型的雷达影像,建议根据数据采集环境、具体研究目的,择优选取图像处理阀值.船舶航行状态感知与其智能航行紧密相关.文中提出的船舶偏转角计算新方法具有简单易行的特点,可与船舶其他传感器(惯导系统)进行信息融合,实现船舶航行状态信息的精确感知与控制,具有较强的可拓展性和深入研究空间.
[1]柳晨光,初秀民,吴青,等.USV发展现状及展望[J].中国造船,2014(4):194-205.
[2]张树凯,刘正江,张显库,等.无人船艇的发展及展望[J].世界海运,2015,38(9):29-36.
[3]陈真义.小型水面无人船航行状态感知系统研究[D].武汉:武汉理工大学,2014.
[4]陶浪舟,李凯,韩焱,等.基于磁传感器组合的运动物体姿态解算[J].传感器与微系统,2013,32(12):124-126.
[5]马鲲.GPS船舶姿态测量技术研究[D].大连:大连海事大学,2004.
[6]张龙平.基于GPS的船舶实时姿态测量方法研究[D].青岛:山东科技大学,2013.
[7]李矩海,李良雄,万大斌.一种船舶姿态模型的确定方法[J].测绘通报,2001(6):22-24.
[8]刘柯.基于视觉图像的船模运动姿态分析[D].无锡:江南大学,2015.
[9]李晓飞,宋亚男,徐荣华,等.基于双目视觉的船舶跟踪与定位[J].南京信息工程大学学报(自然科学版),2015(1):46-52.
[10]任福安,邵秘华,孙延维.船载雷达观测海浪的研究[J].海洋学报,2006,28(5):152-156.
[11]楚晓亮,徐铭,王峰,等.利用X波段雷达提取海浪信息的分析[J].中国海洋大学学报(自然科学版),2011,41(5):110-113.
[12]IZQUIERDO P, SOARES C G, BORGE J C N, et al. A comparison of sea-state parameters from nautical radar images and buoy data[J]. Ocean Engineering,2004,31(17/18):2209-2225.
[13]冯海洋.基于航海雷达的海浪与溢油信息提取方法研究[D].大连:大连海事大学,2015.
[14]许海东,安伟,宋莎莎,等.船载溢油雷达监测技术研究[J].船海工程,2014,43(5):48-50.
[15]丁献文,黄冬梅,邹国良,等.面向船载雷达图像的船只检测方法[J].计算机工程,2011,37(3):161-162.
[16]JIANG Q S, AITNOURI E, WANG S R. Automatic detection for ship target in sar imagery using pnn model[J].Canadian Journal of Remote Sensing 2000,26(4):55-58.
[17]刘斌,黄韦艮,杨劲松,等.基于船载雷达图像的海上船只检测方法[J].海洋学研究,2009,27(4):33-38.
[18]陈鹰,叶勤,钟志勇.基于小波变换的雷达与光学影像匹配算法研究[J].测绘学报,2000,29(3):245-249.
[19]LIU J, XIE L. Study of inland river maritime radar image gabor wavelet edge recognition based on direction adaptive[C].International Conference on Transportation Information and Safety,IEEE,2015.
[20]符思涛,李震,田帮森.全极化合成孔径雷达影像地形纠正及其在雪冰制图中的应用[J].中国图象图形学报,2014,19(1):150-157.
[21]程江华,高贵,库锡树,等.高分辨率SAR图像道路交叉口检测与识别新方法[J].雷达学报,2012(1):100-108.
[22]CHEN Q, ZHAO L, LU J, et al. Modified two-dimensional otsu image segmentation algorithm and fast realisation[J]. Iet Image Processing,2012,6(4):426-433.
[23]左文明.连通区域提取算法研究[J].计算机应用与软件,2006,23(1):97-98.
[24]赵松,李庆,江汉红,等.基于小波和形态学结合的雷达图像降噪算法[J].船电技术,2012,32(7):1-3.
[25]王海虹,曾妮,陆威,等.基于小波变换和数学形态学的激光成像雷达图像边缘检测[J].中国激光,2008,35(6):903-906.
[26]王小俊,刘旭敏,关永.基于改进Canny算子的图像边缘检测算法[J].计算机工程,2012,38(14):196-198.
[27]邱桑敏,夏雨人.一种快速霍夫变换算法[J].计算机工程,2004,30(2):148-150.
Novel Calculation Method of Deviation Angle of Ship Based on Radar Images
ZHONG Cheng1)JIANG Zhonglian1,2)CHU Xiumin1,2)LUO Yi3)
(IntelligentTransportSystemsCenter,WuhanUniversityofTechnology,Wuhan430063,China)1)(NationalEngineeringResearchCenterforWaterTransportSafety,Wuhan430063,China)2)(SchoolofLogisticsEngineering,WuhanUniversityofTechnology,Wuhan430063,China)3)
It is of vital importance to obtain accurate and real-time navigation information for the attitude control and autonomous navigation of ship. A novel calculation method of deviation angle of ship based on radar images is proposed. Linear components are extracted from the radar images sequence, by which the angle of deviation can be deduced. The comparison of calculations and experimental data indicates that the error would not be accumulated with the time and its maximum falls in 4%. The present method provides a framework for the future advancement of attitude and navigation control algorithm of ship.
radar images; angle of deviation; pretreatment; Hough transform
2016-11-13
*国家自然科学基金项目(61273234)、武汉理工大学自主创新研究基金项目(2016IVA097)资助
U666.1
10.3963/j.issn.2095-3844.2016.06.009
钟诚(1987—):男,博士生,主要研究领域为船舶控制与智能仿真技术
猜你喜欢
疯狂英语·新读写(2021年6期)2021-08-05
传感器世界(2019年6期)2019-09-17
西部交通科技(2018年2期)2018-06-14
北京航空航天大学学报(2017年5期)2017-11-23
中学生英语(2017年6期)2017-07-31
通信产业报(2016年44期)2017-03-13
青年歌声(2017年6期)2017-03-13
电脑知识与技术(2015年24期)2015-11-17
军事历史(1999年2期)1999-08-21
雕塑(1999年2期)1999-06-28