
三维测量在物理实验教学上的应用
2016-12-24 02:45刘威李明
高教学刊 2016年19期
刘威 李明
(武汉大学物理科学与技术学院,湖北武汉430072)
三维测量在物理实验教学上的应用
刘威 李明
(武汉大学物理科学与技术学院,湖北武汉430072)
物体表面积是物体的基本物理参数,在大学物理实验中有着广泛的应用。然而复杂物体的表面积测量是非常有难度的工作。为实现复杂不规则物体表面积的快速测量,采用脉冲激光TOF(Time Of Flight)技术采集待测物体的三维点云信息,然后对点云数据进行处理来实现三维模型的重建,最终实现模型的优化以及表面积数据的快速测量。实验结果表明系统能在较短的时间内实现模型重建并快速有效地实现表面积测量。这样的测量方法与传统的测量方法相比具有极大的创新性,系统成本低、不仅操作方便而且简单直观。其新颖性更是大大激发了大学生物理实验的学习兴趣。
激光脉冲;TOF技术;三维建模;表面积测量
在大学物理试验中,对物理表面积的测定是非常重要的,特别是在流体力学,空气动力学等实验上,物体表面积起着决定性的作用。然而,对于外形结构复杂的物体而言其表面积的测量一直是比较复杂的问题。近些年,通过获取物体三维信息进行逆向工程的非接触式测量方案有了很大的发展。而目前的非接触式测量方案主要是基于三维激光扫描仪[1]、三维结构光扫描仪[2]等,其采集的点云数据密度相对偏高会占用过多的硬件资源,而且造价相对昂贵,不适合实际的推广应用。为此,文中采用微软推出的Kinect V2体感摄像机,依靠RGB彩色摄像机、红外线投影仪和红外摄像头采集彩色图像数据与深度图像数据。尤其是采用的TOF技术[3]即飞行时间法3D成像,其采集数据的稳定性相对较高而且细节更多,被外在环境的光源影响也相对较低,而且相比较而言外形小巧价格也很便宜。因而系统借助该体感设备采集待测物体的深度信息。在点云数据融合过程中,我们发现待测物体与测量平台接触面处的点云信息是比较复杂的。虽然进一步采用相关的滤波算法可以移除一定量的点云数据,但是测试发现无法完全移除无关点云尤其是深度接触的接触面点云信息,而且增加了算法复杂度。因此文章借助三维分析软件3ds MAX(3D Studio Max)对模型进行优化处理,进而实现表面积的测量。
模型的还原度,引入的孔洞、褶皱等直接影响到表面积的测量,毕竟物体模型重建的过程受到外界光照环境、数据采集时间、待测物体体积等多种因素影响。因此,本文探究分析了一系列影响因素,并选取合适的测量外部条件对多种不同体积物体的表面积进行测量,分析待测物体体积大小对建模测量表面积精准度的影响,为后期进一步的测量分析提供一定的误差预估计与实验参考。这样的测量方法操作简单并具有极大的趣味性,有利于激发大学生的学习兴趣,培养学生的实验操作能力。
一、系统框架
系统总体框架如图1所示,首先采集待测物体的深度数据并通过USB3.0迅速传输至PC机;然后在vs2012环境下实现点云数据的处理与模型的生成;最终将待测物体的三维模型在3ds max软件里面进行进一步的优化与测量分析。

图1 系统框架图
二、程序流程分析
为了实现三维模型的重建需要对点云数据进行算法处理。利用C++对点云数据进行获取与实时处理,经过一定的滤波处理与阈值分割达到点云数据的精简优化,后期经过点云配准融合得到三维模型。其主要流程见图2。
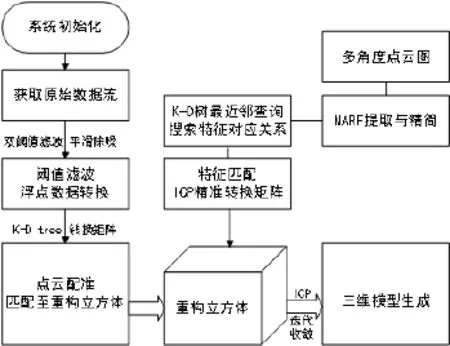
图2 点云数据处理流程图

图3
(一)深度图像数据采集
系统以基于TOF原理的传感器设备Kinect v2获取多角度的多帧待测物体的深度数据。不同于微软早期体感传感器采用的Lighting Coding技术[4]的立体编码(容易受环境光干扰而且会出现散斑)。该传感器通过给待测物体连续发送脉冲光,然后用IR传感器接收从物体返回的反射光,通过探测光脉冲的飞行(往返)时间来计算出目标物的距离,不仅在数据的稳定性方面有了较好的提高,而且也增加细节减少了散斑的出现。另外,其极高的性价比和外形的小巧便携性更是引起了研究开发人员的广泛关注,具有普遍的适用性。
(二)点云数据初步处理
传感器获取的深度帧数据包含了深度值数据与游戏索引数据,为了获取点云图像的实际深度需要进行浮点型数据转换,提取深度值数据然后以深度值为对象进行双阈值处理[5]。由于传感器本身有最低距离限制50cm,因此低阈值选取需要大于此值,对于高阈值可以根据实际测量环境进行设置。如此便可以将背景图像分割开来,免除点云数据的冗杂性。
(三)转换矩阵与点云配准
对于多帧的点云数据处理,需要将每相邻帧的NARF(关键点)进行提取,然后进行特征描述进而获取初步的转换矩阵,最后根据ICP(迭代最近点)算法[6]收敛到一定精度进行点云配准。
1.关键点提取与特征描述
为了从深度图像中识别待测物体需要进行关键点提取,同时也为特征描述减小搜索空间。先通过kd-tree搜索算法[7]建立离散点云的拓扑关系,然后采用SIFT算子遍历深度图像点检索出较稳定的关键点。进一步获取特征向量后依据其平移旋转不变性以RANSAC[8](随机采样一致性)算法去除错误的对应关系从而获得初步的转换矩阵。
2.ICP点云拼接技术
ICP算法通过对大量的对应点关系采用最小二乘法迭代计算更为精准的坐标变换,从而得到旋转矩阵与平移矢量。值得注意的是前期的粗拼接技术为ICP算法提供初始位置,直接决定了算法的收敛速度与拼接精度。在进行连续多帧的点云拼接完成之后,我们便可以得到初步融合的三维模型。
三、三维模型生成与优化
本次实验以最寻常的测量平台即一个简单的稳定工作台面为测量平台。为处理待测物体与测量平台深度接触面处的点云信息,将生成的三维模型导入三维模型分析软件进行优化处理。从而获得了物体的三维模型。
在模型优化的时候将模型转换为可编辑多边形模式,然后利用软件的Modify工具实现对测量物体与测量平台接触面的分离,与此同时若是模型在点云拼接的时候出现孔洞也可以利用Cup Holls进行补洞等操作。如图3(a)所示的椅子实物与图3(b)的生成模型。
四、实验数据测量与分析
为提高复杂不规则物体表面积测量的精准性,本次试验在环境光照、暗室、日光灯照明三种情况下进行深度数据采集,从而比较其各自的测量误差;由于测量时间越长,传感器捕获的待测物体细节越多从而测量越精准,因此比较分析不同测量时间下测量的精准度,从而得到快速与准确度的平衡选择。基于以上的分析,选择合适的统一外部环境对以下多种不同体积的物体进行建模测量分析。
五、实验结果
建立相同的外部环境,通过实际表面积与测量表面积误差分析,得出系统对于不同体积大小的物体的测量精准度曲线。如表1测试发现三种常见外部环境光照条件下误差率基本持平,也验证了传感器的稳定性不易受外界环境干扰。虽然暗室条件误差稍小一些,但是为了实验方便而更具有实用性我们采取日光灯照明进行实验。随着测量时间的增加,传感器的细节捕获存在一定的饱和情况,因此我们综合考虑效率和准确度选择1min作为时间参考依据。
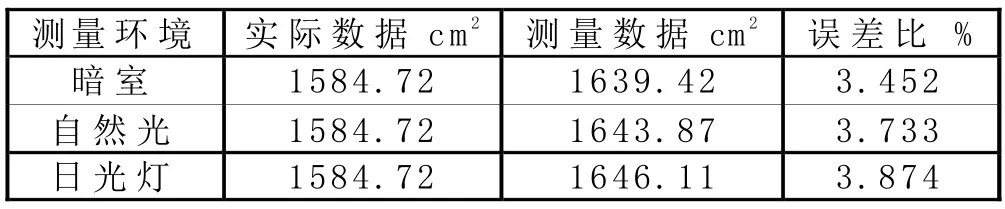
表1 不同测试环境下的误差分析对比

图4 不同体积测量误差比曲线
以控制变量法对不同体积大小的物体表面积进行测量分析,实验分别对四种体积大小待测物体进行五次测量求取平均值,计算其面积误差比。如图4可见,系统的表面积测量误差比与待测物体体积呈负相关。在实际测量过程中,物体体积过小会导致传感器采集的点云信息无法成功的重建,面积误差比高达20%,而对于体积参数越大其测量表面积精准度越高,整体呈正相关趋势。
六、结束语
实验表明通过脉冲TOF技术采集三维点云数据进行预处理以及后期的三维建模能够很好地实现模型的重建,借助3ds MAX三维软件可以很好地对模型实施进一步的优化处理,同时也可以很便捷的测量出复杂不规则物体表面积数据。文中测试分析了不同体积大小的待测物体对表面积测量精度的影响,表明了随着测量物体体积的减小,建模实测表面积误差会增大,呈一定的正相关趋势。为后期研究的误差预估计提供一定的参数依据。并且采用建模实现对复杂物体表面积的测量具有很广泛的应用,如飞机气动外形设计、船舶流阻计算等等,这些都需要对物体表面积进行一定的测量。
[1]Altuntas,Cihan,FerruhYildiz,andMarcoScaioni,Laser Scanning and Data Integration for Three-Dimensional Digital Recording of Complex Historical Structures:The Case of Mevlana Museum.ISPRSInternationalJournalofGeo-Information 5.2,2016.
[2]田里,等.一种结构光三维扫描仪系统自动标定法[J].计算机应用与软件,2011(4).
[3]丁津津,等.基于TOF技术的3D相机应用研究综述:中国仪器仪表学会第十二届青年学术会议论文集[J].仪器仪表学报,2010(8).
[4]曾祥军,等.线结构光三维测量系统扫描方向的标定[J].中国激光,2012(1).
[5]王巍,等.双阈值映射自适应红外图像处理算法[J].红外与激光工程,2010(12).
[6]张晓娟,等.基于特征点和改进ICP的三维点云数据配准算法[J].传感器与微系统,2012(9).
[7]陈晓康,等.基于改进Kd-Tree构建算法的k近邻查询[J].广东工业大学学报,2014(3).
[8]郭红玉,等.一种基于RANSAC基本矩阵估计的图像匹配方法[J].红外,2008(2).
For measuring complex irregular objects's surface area rapidly,we use the pulsed laser TOF(Time Of Flight)technology to collect three-dimensional point cloud information from the object,then deal with the point cloud data to achieve the reconstruction of three-dimensional model under the Visual Studio 2012 development environment. eventually achieve the optimization and rapid measurement of the surface area of the model.Experimental results show that the system can rebuild the model in a short time and measure specific surface area of objects quickly and efficiently.Compared to conventional measurement method,such simple and intuitive system appears to be more innovative and less cost.Its novelty is suitable to stimulate the interest of college students in physics experiments.
pulsed laser;TOF technology;three-dimensional reconstruction;surface area measure
G642
A
2096-000X(2016)19-0121-03
刘威(1979,01-),男,汉族,籍贯:湖北天门,单位:武汉大学物理科学与技术学院,职称:副教授,学历:博士研究生,研究方向:微流控芯片技术。
猜你喜欢
小学生学习指导(高年级)(2022年3期)2022-03-29
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
中学生数理化·高一版(2020年11期)2020-12-14
中学生数理化·高一版(2020年1期)2020-02-20
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
家庭影院技术(2018年4期)2018-05-09
小学生导刊(高年级)(2017年2期)2017-06-10
幼儿智力世界(2016年11期)2017-02-21
小学生导刊(2017年6期)2017-02-10
小学生导刊(高年级)(2016年1期)2016-01-29
