
基于DSP的飞行仿真转台控制系统设计
2016-12-23 11:18王丽莹
电子设计工程 2016年24期
赵 辉,王丽莹
(1.渤海大学 辽宁 锦州121013;2.黑龙江八一农垦大学 黑龙江 大庆163318)
基于DSP的飞行仿真转台控制系统设计
赵 辉1,王丽莹2
(1.渤海大学 辽宁 锦州121013;2.黑龙江八一农垦大学 黑龙江 大庆163318)
针对飞行仿真转台的精确控制问题,提出了一种基于DSP的转台控制系统设计方案,并完成了系统的硬件,软件及控制算法的设计。该系统的硬件部分以DSP为核心控制器,结合VC++编写的上位机控制界面软件,并利用双闭环PID算法实现对转台的高精度控制。通过实际测试和实验,表明该控制系统具有控制精度高,性能稳定的特点,达到了设计要求。
数字信号处理器;飞行仿真转台;PID;高精度;上位机
随着航空、航天工业技术的迅速发展,对飞行器的研制成本和研发周期要求越来越高,这促进了飞行器仿真系统的研制和开发。飞行仿真转台是一个高精度的随动系统,由精密机械台体和高性能的控制系统两部分组成[1-3]。
作为飞行器控制系统半实物仿真回路中的关键设备之一,要求飞行器仿真系统能够模仿飞行器在空中飞行时姿态变化,并且在半实物仿真中能够实时反馈敏感元件如陀螺的角位置、角速度等信号变化,从而使其能感受到与飞行器实际飞行时较逼真的姿态变化信号[4-6]。一般情况下,飞行器仿真系统的设计应做到控制精度高,响应速度快和运行稳定可靠等多项技术指标[7]。因此,研制一套可靠的控制系统具有重要意义。
为了实现对飞行仿真转台的精确控制,在做了需求分析的基础上,提出并设计了基于DSP的飞行仿真转台控制系统。该系统能够完成对其准确控制。
1 总体设计
该控制系统结构图如图1所示,控制系统由控制单元、功放单元、测角单元、执行机构组成。在对飞行器仿真系统控制的过程中,控制单元完成转台数字、模拟控制及数据处理等功能,功放单元对控制信号进行功率放大并驱动执行机构拖动电机转动;
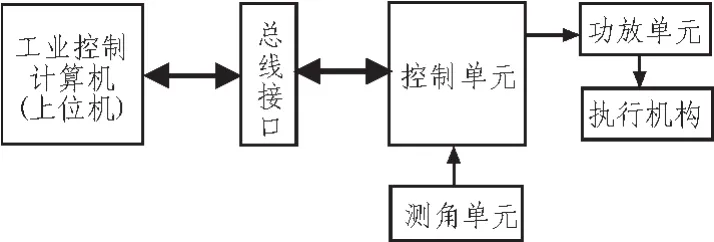
图1 控制系统结构
测角单元主要由感应同步器及其接口电路构成,用来检测敏感元件的位置和速度信号;控制单元与上位机之间相互通信,并利用接口总线将数据上传到上位机,最后由上位机界面实时显示飞行器仿真转台的工作状态。
2 系统硬件设计
飞行仿真控制系统下位机硬件部分主要由DSP控制电路、功放电路、通信模块、测角电路等组成,系统硬件结构图如图2所示。文中只对上述关键部分给出介绍。
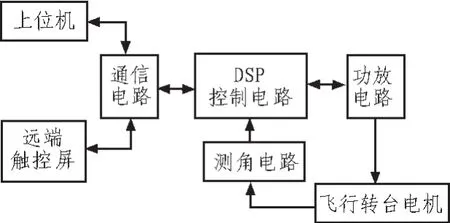
图2 系统硬件结构图
DSP控制电路主要用来完成测角数据计算处理功能[8-10]。控制电路主要由数字控制单元和模拟控制单元两个部分构成,其中数字控制单元不仅可以接收测角数据并将其耦合成角度值,还可直接控制飞行转台的开关量;模拟控制单元的作用是将数字控制量按照PID算法计算出被控量,并将其转化成模拟量送到功放电路来控制飞行转台电机[11-13]。
功放电路主要实现信号的功率放大作用。本设计中采用两个串联的LM12组成功放电路,将输入端信号分别放大反向和正向各10倍,放大器输出端符号相反,因此总的输出电压可达到56 V,并设计了由4个快速2极管组成的限压保护电路。在输出端,将两路信号输出端直接接电机驱动转台运行。加入电流反馈的作用是为了提高系统的平稳性,并可以从测量的电流反馈值来判断转台是否超速,若超速则可紧急制动,并向DSP控制电路发送超速警报。
通信模块是飞行控制系统与上位机进行通信的接口,设计中通过采用 TL16C550异步串行通信收发器配合AM26LS31/32实现DSP与上位机的通信。其中TL16C550的WR1和RD1共用DSP芯片的读写信号W/R,读写信号经反相后接到TL16C550的RD1端,解决了异步串行收发器不能同时发送和接收数据的问题。发送器就绪信号TXRDY和接收器就绪信号RXRDY通过一个或门共用DSP的第二个中断源INT2,读取中断标志寄存器IIR的值可以识别出中断类型。同时为了实现对飞行仿真转台的远程控制,设计中采用了传输距离更长的485标准串口,通过DSP与工控机信息交换,实现即时显示飞行仿真转台的运行状态,运行速率以及远程更改DSP程序中PID参数等作用[14]。
测角电路由粗、细两种测角机构组成;粗精两套测角系统在结构上是相同的,都采用单相激磁双相输出跟踪鉴幅型方式。测试过程中利用旋转变压器完成粗测角,随后由感应同步器实现精测角;前置放大器接收感应同步器输出的精测角信号后,连通旋转变压器定子输出信号转化成数字式的角度信号,随后进一步的由DSP控制电路进行处理。采用这种测角方式具有精度高、可靠性好、安装方便等优点。两通道测角数据经粗精耦合处理可达到分辨率为0.0001°和000.0000°~359.9999°的测量范围。
3 系统软件设计
该系统在设计过程中,软件系统主要分布在上位机和下位机两部分,其中上位机软件采用VC++可视化设计,利用该软件开发应用程序主要有两种模式,一种是WIN API方式,另一种则是MFC方式,传统的WIN API开发方式比较繁琐,而MFC则是对WIN API再次封装,所以MFC相对于WIN API开发更具备效率优势,同时其所具备的界面简洁,占用资源少,操作方便等优点也是本设计选择该开发系统的原因之一[15-16]。为了日后的更新、维护与拓展,在设计过程中采用模块化的思想,整个系统中上位机主要包括交互模块、数值分析模块、控制模块等,下位机软件系统主要包括角度检测模块,滤波处理模块、位置环计算模块、速率环计算模块、输出控制模块、总线通信模块等组成。系统软件设计的结构图如图3所示。
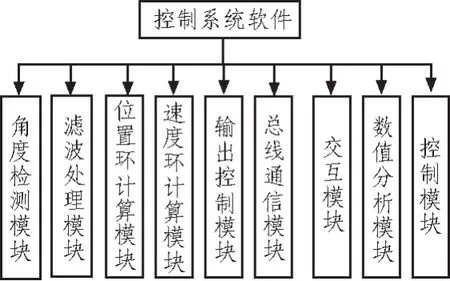
图3 系统软件设计结构图
在上位机软件设计中,交互模块主要用来实现上位机与下位机DSP之间的数据交换功能,可以通过上位机向下位机DSP发送控制参数,如P、I、D参数等,同样的,下位机也通过该模块上传飞行仿真转台的状态参数,用于上位机做出控制决策的依据。数值分析模块主要用来对下位机上传来的参数进行分析和处理,如当前转台运行的位置和速度是否在预定控制要求内,并根据分析结果向用户提供可行的控制建议等;控制模块的作用是将数值分析模块提供的控制建议进行二次加工处理,并将控制参数打包后通过交互模块发送到下位机。
下位机中的角度检测模块主要是通过A/D转换器将粗、细两种测角模式下的模拟角度值进行实时采集,并将其转换成数字量;滤波处理模块主要用来将前期采集和检测到的角度值进行滤波处理(如IIR滤波),目的是将信号中掺杂的噪声信号处理掉;位置环计算模块的作用是通过判断飞行仿真转台旋转方向和速率环的偏差量来计算出当前转台所处位置;速率环计算模块是通过计算相邻采样时刻的位置值之差获得当前转台的运行速率;输出控制主要是将位置环P、I、D参数和速率环的P参数进行设置,并将参数转换模拟信号用于控制电机;通信模块是下位机与上位机进行通信的接口,通过该接口可以实现数据的发送和接收,具有传输速率快的优点。
上电开始后经过总线接口初始化后进入待机状态。若飞行仿真转台不在运行状态时,可以通过485总线接收指令并改变运行速率和PID控制参数。若飞行仿真转台处于运行状态,则需制动转台后再进行参数的修改。当主程序接收到指令时,主程序打开测角中断进入运行状态。在运行状态下,主程序处于测角中断等待状态;DSP以0.5ms作为采样周期;进入采样中断程序后进行一次测角取数,A/D转换、滤波处理、角度耦合,PID控制量的计算以等过程。软件设计的流程图如图4所示。
4 测试与验证
该控制系统用于单轴飞行仿真转台的控制。在进行控制实验时,首先启动上位机应用程序,手动设置飞行转台控制参数,并通过完成通信接口设置实现对下位机DSP芯片的初始化。其中通信接口需要下位机DSP发送命令字,并接收来自DSP上传的检测数据进行数据分析。实验过程中,分别针对转台的不同运行速率进行平稳性测试,实验测试结果如下表所示。
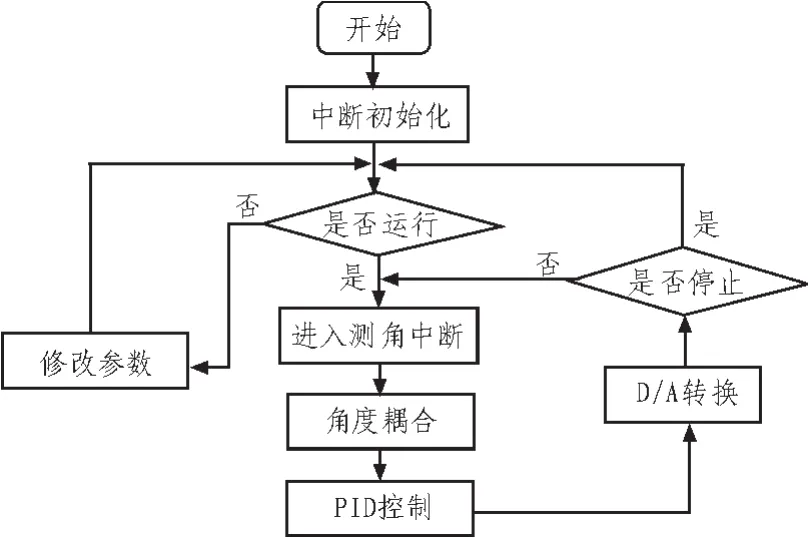
图4 系统软件设计的流程图
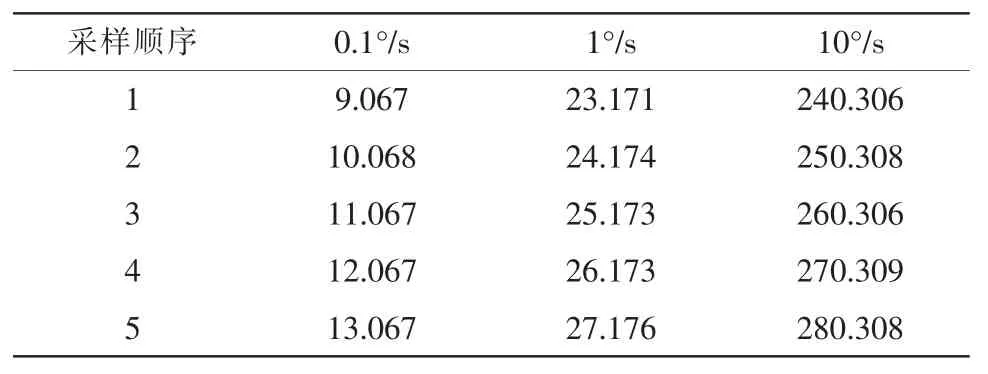
表1 采样数据
在转台速度分别为0.1°/s、1°/s和10°/s情况下对控制系统进行测试,如表1所示;在获得数据基础上计算三种情况下的角速率精度和速率稳定度两个指标,如表2所示。

表2 控制指标
通过实际测试发现,DSP控制系统的小偏差位置控制效果准确、稳定性高,完全满足设计要求。
5 结束语
该控制系统采用了DSP高速数字信号处理器为控制核心,软件上采用了基于PID算法的双闭环控制思想,提供了控制系统的速度和精确性;该控制系统已对某型单轴飞行仿真转台进行测试,实际应用表明该控制系统具有控制精度高、稳定可靠等特点,达到了设计要求。
[1]胡恒章,于镭,刘升才.三轴转台快速精密定位系统的智能控制[J].导弹于航天运载技术,1994,212(6),34-38.
[2]王卫红,王广雄,苏宝库.精密转台控制系统设计的几个问题[J].哈尔滨工业大学学报,1995,27(6):76-79.
[3]关林君,裴海龙,贺跃帮.基于运动控制卡的两轴转台控制系统设计[J].计算机工程与设计,2011,32(3):863-866.
[4]郎兴华,张伟等.三轴惯性陀螺测试转台控制系统的研制[J].自动化与仪器表,2003,9(10):31-33.
[5]邓霞.一种新型储能变流器的人机界面设计方法与实现[J].电测与仪表,2016,53(4):97-101.
[6]李松健,白涛等.新型三轴转台模拟卫星飞行解耦方法研究[J].计算机应用研究,2016,24(3):72-75.
[7]白国振,俞洁皓.基于神经网络补偿的转台伺服系统控制研究[J].计算机应用研究,2016,33(1):1-9.
[8]徐坤,周子昂.基于DSP直流无刷电机控制系统的设计与实现[J].信阳师范学院学报:自然科学版,2016,29(2):249-252.
[9]彭玉青,李虹阳等.基于DSP的电子行走辅助系统的设计与实现[J].计算机工程与设计,2015,36(7):1758-1761.
[10]石冰倩.基于DSP的导航计算机硬件设计[J].信息技术与信息化,2015,12(3):128-131.
[11]荣盘祥,张亚慧.基于DSP的运动控制卡的研究与开发[J].电机与控制学报.2011,15(3):35-39.
[12]逄海萍.DSP基于模型的异步电动机的直接转矩控制[J].甘肃科学学报,2016,28(1):45-50.
[13]李敏,赵剡.基于多功能数据采集卡和变速PID的转台控制系统设计[J].计算机测量与控制,2015,23(5):1556-1559.
[14]顾卫钢.手把手教你学DSP:基于TMS320X281X[M].北京:北京航空航天大学出版社,2011.
[15]杨东海,翁新华等.基于VC++和MFC的上位机与LPC的通讯系统[J].微计算机信息,2003,19(3):10-12.
[16]李笑天,殷淑娟等.一种DSP周期精度高效建模方法[J].计算机应用研究,2015,32(1):121-124.
Design of flight simulation turntable control system based on DSP
ZHAO Hui1,WANG Li-ying2
(1.Bohai University,Jinzhou 121013,China;2.Heilongjiang Bayi Agricultural University,Daqing 163318,China)
Aiming at the precision of flight simulation turntable,we propose an design scheme of control system base on DSP. The hardware system,software system and control algorithm are designed in this paper.The DSP play an core control chip in the hardware system.and the software system of host computer adopts the VC++software as development environment.The double closed loop PID algorithm is applied to the DSP chip to improve the control precision.The experiment and application show that this control system has good performance,and achieve the design requirement.
DSP;flight simulation turntable;PID;high-precision;host computer
TP23
A
1674-6236(2016)24-0064-03
2016-04-20 稿件编号:201604199
国家青年基金项目(61304053)
赵 辉(1984—),男,吉林公主岭人,硕士,助理实验师。研究方向:智能控制、信号处理。
猜你喜欢
科技与创新(2018年1期)2018-12-23
车迷(2018年12期)2018-07-26
航天电子对抗(2018年3期)2018-07-14
航天电子对抗(2018年6期)2018-03-04
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
学习月刊(2015年3期)2015-07-09
空间控制技术与应用(2015年2期)2015-06-05
