基于滑模变结构理论的车辆主动横向稳定杆控制
2016-12-23 02:58夏长高
中国机械工程 2016年23期
陈 松 夏长高 孙 旭
1.江苏大学,镇江,212013 2.南通航运职业技术学院,南通,226010
基于滑模变结构理论的车辆主动横向稳定杆控制
陈 松1,2夏长高1孙 旭2
1.江苏大学,镇江,212013 2.南通航运职业技术学院,南通,226010
为实现对车辆的侧倾控制,自主设计了主动横向稳定杆(AARB)装置。针对车辆在侧倾中存在的非线性、时变性特点,采用滑模变结构控制理论建立了滑模控制器从而实现对理想侧倾角的跟踪,并采用鱼钩与双移线转向工况进行了仿真试验。仿真结果表明,该主动横向稳定杆装置与传统被动横向稳定杆装置相比,能有效减小车辆的侧倾,同时具有良好反馈特性以,有利于驾驶员对车身姿态的判断,从而大大提高了车辆行驶的安全性与乘坐舒适性。
主动横向稳定杆;侧倾;滑模控制;安全性
0 引言
当车辆在急转方向且转角较大时,传统被动横向稳定杆无法实时调整悬架侧倾角刚度,对于重心较高的车辆,容易引起汽车车身出现过大的侧倾进而发生翻车,影响到汽车的行驶安全性。在侧倾控制方面,目前主要有以下几种主动控制技术:半主动悬架[1]、主动悬架[2]、主动转向[3]、差动制动[4]与主动横向稳定杆(activeanti-rollbar,AARB)[5-6]控制。主动横向稳定杆能根据汽车的转向行驶状况,适时地改变悬架的侧倾角刚度,减小车辆的侧倾,相比其他几种控制技术能更直接、有效地控制车辆的侧倾,同时主动横向稳定杆还具有低成本、易于实现等特点。文献 [7] 提出了一种电动液压控制的主动横向稳定杆,采用前后主动横向稳定杆的双回路控制系统,通过仿真与试验验证了该主动横向稳定杆能有效控制车辆的侧倾。文献 [8]采用基于侧向加速度的模糊PID控制,实现主动横向稳定杆对车辆侧倾的控制。文献 [9] 采用基于理想侧倾角的PID控制与补偿控制来得出控制车辆侧倾所需的反侧倾力矩。文献 [10]为轻型商用车设计了一种电动液压控制的主动横向稳定杆,采用了LQ控制理论实现侧倾控制所需的力矩。文献 [11] 针对空气悬架客车侧倾稳定性差的特点,采用变刚度横向稳定杆,并给出了前后悬架变刚度横向稳定杆角刚度关系式,通过仿真表明该装置能够在几乎不影响车辆平顺性的前提下,有效控制车身侧倾。
以上文献大多采用液压式的主动横向稳定杆控制车辆的侧倾或只用反侧倾力矩的大小代表主动横向稳定杆装置的控制,不涉及具体的实现装置。
考虑到电机控制式相比液压控制式的主动横向稳定杆具有结构简单、响应快、能耗低、不容易出现管路漏油等优点,本文提出了一种新的电动式主动横向稳定杆装置。由于谐波齿轮机构具有传动比大、体积小、传动平稳、噪声小及传动效率高等优点,故所设计的主动横向稳定杆装置中采用谐波齿轮机构作为减速机构。同时考虑到车辆在侧倾中存在非线性、时变性的特点,采用滑模控制器来对车辆的侧倾进行主动控制。
1 AARB结构及车辆动力学模型
1.1AARB结构
图1所示为AARB结构示意图,由直流电机、左右谐波齿轮减速齿轮机构、左右稳定半杆、左右稳定半杆连接臂等组成。控制器根据侧倾角、侧向加速度与车轮转角控制电机电枢轴的输出转矩,电机的电枢轴与左右两侧谐波齿轮中的波发生器相连,故两侧的谐波齿轮传动中,波发生器均为输入。其中左侧谐波齿轮的柔轮固定于底盘,刚轮为输出;右侧谐波齿轮的刚轮固定于底盘,柔轮为输出;设zLS、zLF、zRS、zRF分别为左侧刚轮与柔轮齿数以及右侧刚轮与柔轮齿数,且取zLS=zLF+2,zRS=zRF+2(2为刚轮与柔轮的齿数差)。
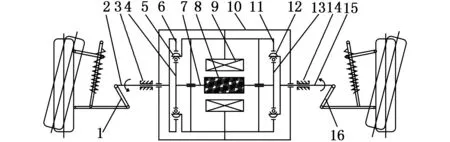
1.左扭杆连接臂 2.左稳定半杆 3.左支承构件 4.左谐波齿轮机构的波发生器 5.左谐波齿轮机构的柔轮 6.左谐波齿轮机构的刚轮 7.电机输出轴 8.电机转子 9.电机定子 10.壳体 11.右谐波齿轮机构的刚轮 12.右谐波齿轮机构的柔轮 13.右谐波齿轮机构的波发生器 14.右支承构件 15.右稳定半杆 16.右扭杆连接臂图1 主动横向稳定器结构示意图
则左侧的谐波齿轮传动比为
(1)
右侧的谐波齿轮传动比为
(2)

当汽车转向行驶时,汽车车身向外侧倾,控制器根据车身侧倾角、侧向加速度的大小控制电机输出扭矩,电机的电枢轴通过与之相连的左右谐波齿轮机构带动左右稳定半杆产生相对扭转,从而形成扭矩阻止车身的侧倾,该力矩在减小车辆侧倾的同时,有效改善左右轮胎与路面的附着状况,提高汽车的行驶稳定性和安全性。
1.2 车辆动力学模型的建立

图2 整车侧倾动力学模型
以带有主动横向稳定杆的车辆为研究对象,建立图2所示的包括整车的横摆、侧倾及侧向运动在内的三自由度整车动力学模型。
侧向:
(3)
横摆:
(4)
侧倾:
(5)
(6)

由于车辆侧倾时对车轮垂直载荷的影响及轮胎的非线性特性,故侧偏力采用魔术轮胎模型得到。
由直流电机的输出特性得
TL=kaI
(7)
式中,ka为电机电流转化为转矩的比例系数;I为电机输入电流。
由于左右侧谐波齿轮传动比大小相等,由谐波齿轮传动关系得
ih=zLF/2
(8)
联合式(6)~式(8)得
(9)
2 滑模控制器设计
车辆转向时,由于离心力的作用,车身会产生一定的侧倾,但过大的侧倾会影响乘坐舒适性及导致驾驶员紧张,甚至会造成车辆侧倾的危险。所以选定车辆的理想侧倾角φref需要同时兼顾乘坐舒适性和良好的车辆侧倾反馈,以满足驾驶员对车身姿态的判断。文献[12]提出,轿车以0.4g的侧向加速度进行转弯时,其侧倾角应控制在2°~4.5°以内;而当车辆以0.6g的侧向加速度进行转弯时,侧倾角应控制在6°以内。
文献[13]在大量试验的基础上给出了车身侧倾角-侧向加速度曲线,如图3所示。图中仅给出侧向加速度为正值时候的部分区域,阴影区域作为正常车辆侧倾角-侧向加速度变化的合理范围,其中连续曲线表示理想侧倾角曲线。本文选取理想侧倾角曲线作为车辆行驶时理想目标参考,其数值关系为
(10)
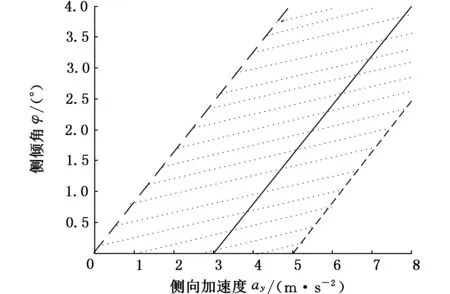
图3 理想侧倾角与侧向加速度之间关系
式(10)中φref单位为(°),ay单位为m/s2。φref关于ay的函数为分段不连续函数,在实际模型计算中无法直接应用。因此,本文对式(10)选取车身侧倾角-侧向加速度曲线进行拟合处理,拟合所得曲线如图4所示。拟合后理想侧倾角与侧向加速度的函数关系如下:
φref=aexp(bay)+cexp(day)
(11)
a=0.2233b=0.3742c=-0.2233d=-0.3742
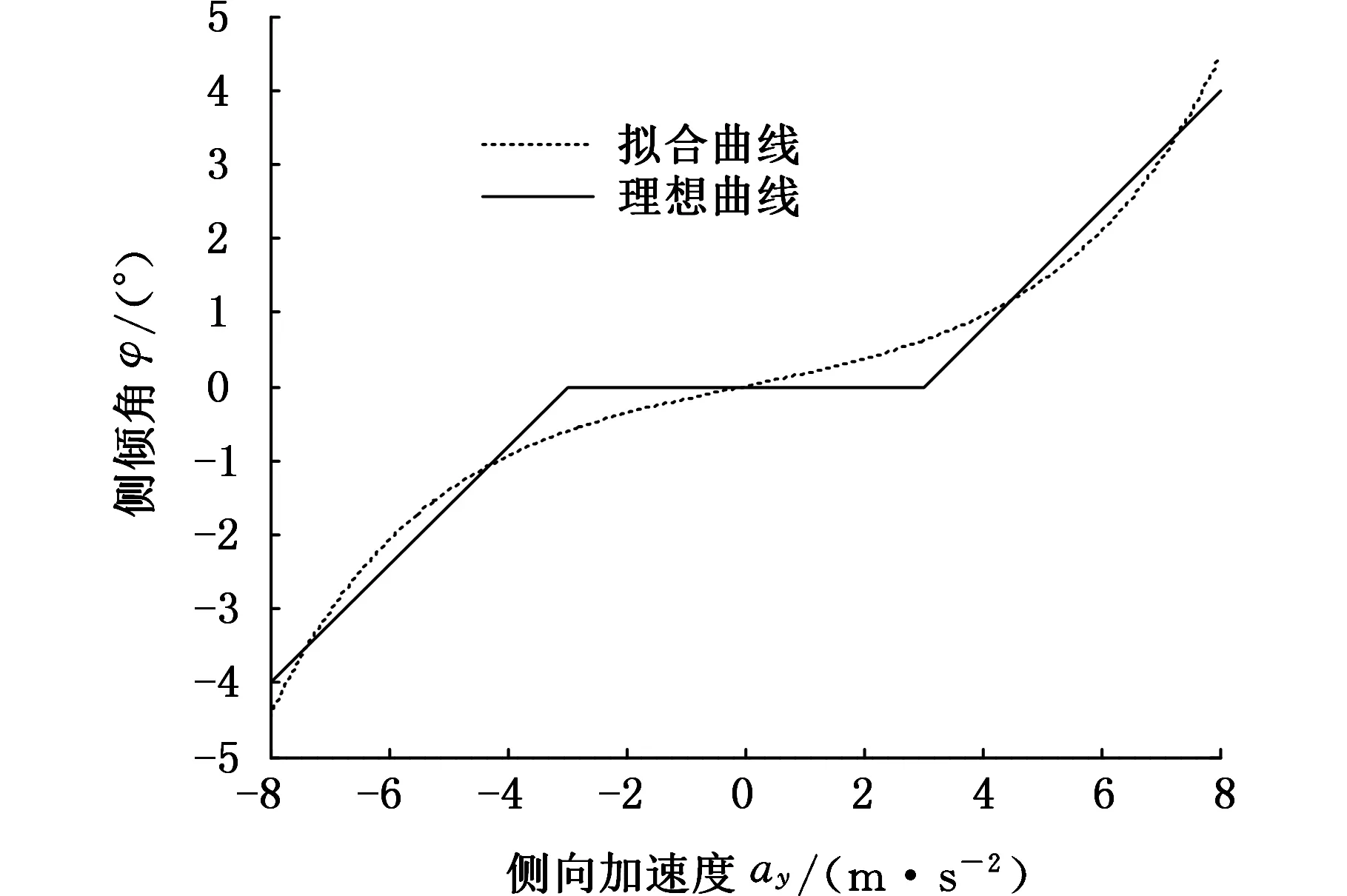
图4 拟合后理想侧倾角与侧向加速度关系曲线
汽车转向侧倾时,由于轮胎侧偏、轴荷载转移的影响, 存在非线性、时变性的特点。作为一种非线性控制,滑模控制可以迫使系统在一定条件下沿规定的状态轨迹做小幅度、高频率的上下运动,该运动轨迹与控制对象参数以及外部干扰变化无关[14]。本文通过采用滑模控制器来实现对理想侧倾角的跟踪,从而保证车辆在转向时具有良好的侧倾稳定性。
令滑模面
s=φ-φref
(12)
为提高系统的动态品质,到达条件采用指数趋近律。由到达条件可得

(13)
式中,k、ε为滑模控制参数。
由式(3)、式(4)得
(14)
(15)
将式(14)、式(15)代入式(5)得
(16)
联合式(12)、式(13)、式(16)得
(17)
实际控制中,由于滑模控制存在高频抖振问题,合理抑制抖振成为设计滑模控制器的关键。指数趋近律法能很好地减弱滑模控制中的抖振。合理的趋近律设计可以在远离切换面时,使运动点趋向切换面的速度增大,以加快系统动态响应速度;在趋近切换面时,其速度渐近于零,以减弱控制中的抖振。另外,采用饱和函数sat(s,δ)代替控制律中的符号函数sgn(s),能进一步解决抖振问题。饱和函数sat(s,δ)的表达式如下:
(18)
用饱和函数sat(s,δ)代替符号函数sgn(s),可得
(19)
把式(19)代入式(9)得电机电流:
(20)
3 AARB台架试验
车辆转向侧倾时,侧向加速度会引起侧倾力矩。若要维持车辆平稳,则AARB与悬架系统所产生的侧倾反力矩之和必须与之平衡。图5为AARB台架试验装置图,固定主动横向稳定杆的一端,另一端通过液压加载器进行加载,用来模拟不同侧向加速度下产生的侧倾力矩Mroll=mshsay,在不同侧倾力矩下测试AARB输出的力矩值MA。
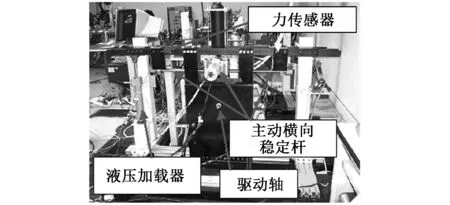
图5 AARB台架试验装置图
图6、图7分别为侧向加速度ay、侧倾角φ与AARB产生的侧倾反力矩Uanti-roll的试验与仿真结果对比图。图6中:
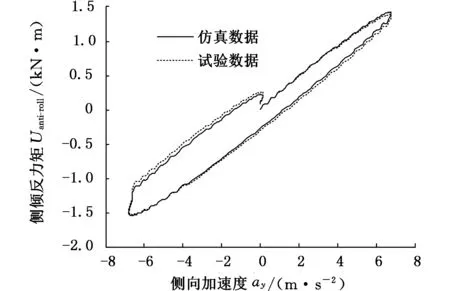
图6 ay-Uanti-roll试验与仿真对比图
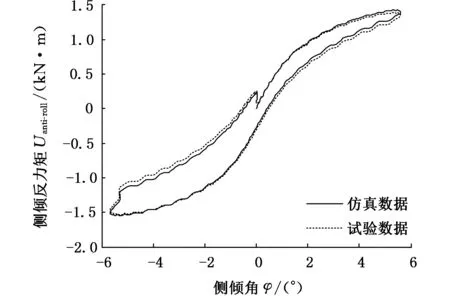
图7 φ-Uanti-roll试验与仿真对比图
由图6、图7可知,随着侧向加速度与侧倾角的变化,由AARB试验得出的侧倾反力矩值与仿真得到的曲线较吻合,从而验证了仿真模型的正确性。
4 仿真验证与分析
为验证主动横向稳定杆在主动侧倾控制方面的效果,本文以某SUV车辆为研究对象,搭建整车动力学控制模型,采用双移线工况和鱼钩工况进行仿真及结果分析。该车辆的主要结构参数如表1所示。
表1 车辆主要参数
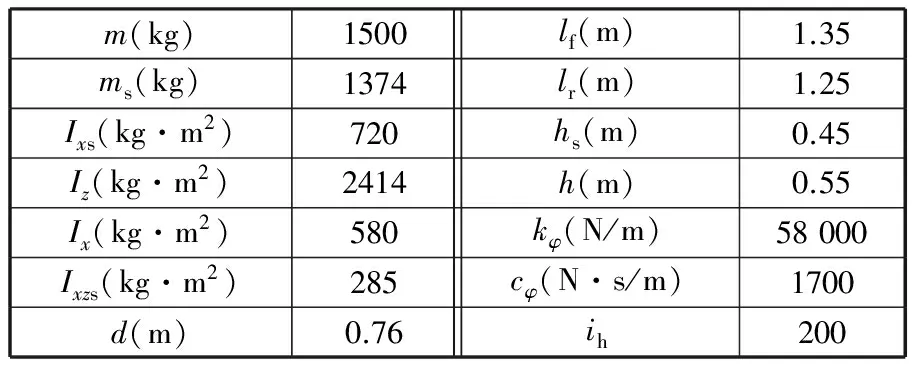
m(kg)1500lf(m)1.35ms(kg)1374lr(m)1.25Ixs(kg·m2)720hs(m)0.45Iz(kg·m2)2414h(m)0.55Ix(kg·m2)580kφ(N/m)58000Ixzs(kg·m2)285cφ(N·s/m)1700d(m)0.76ih200
4.1 双移线工况
仿真时,对车速为60km/h、行驶在附着系数为0.85的良好路面上的车辆进行仿真试验,转向盘转角输入如图8所示。对不施加控制的被动系统与主动横向稳定杆控制系统进行仿真对比,仿真结果如图9~图12所示。
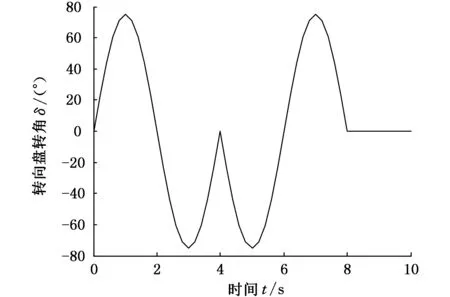
图8 转向盘转角双移线输入
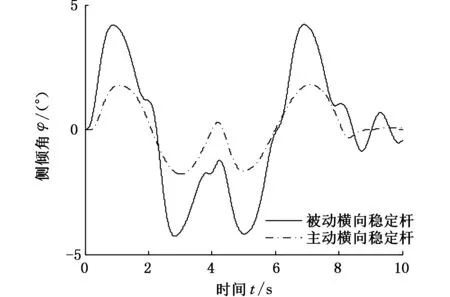
图9 车身侧倾角响应曲线(双移线工况)
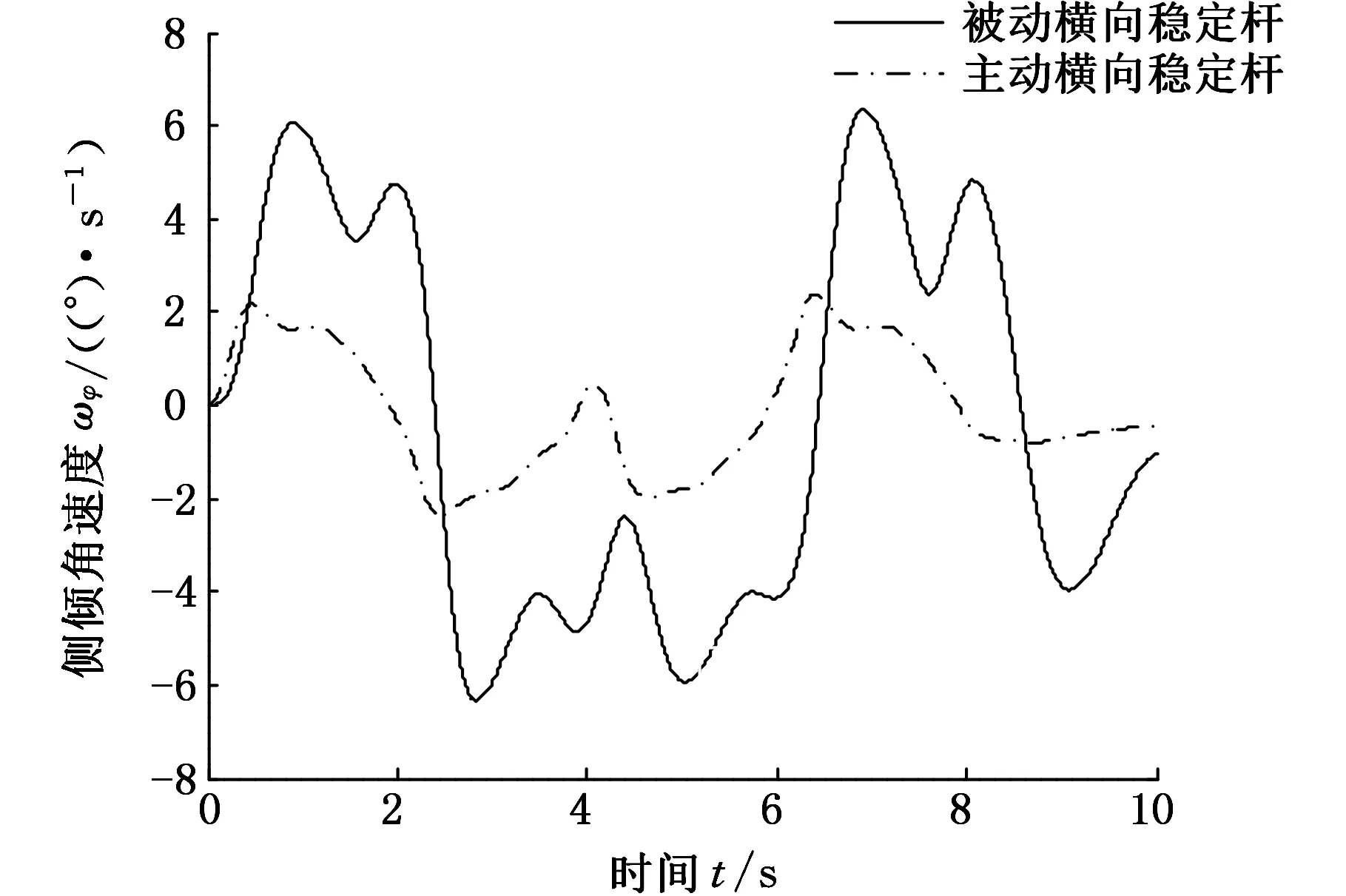
图10 车身侧倾角速度响应曲线(双移线工况)
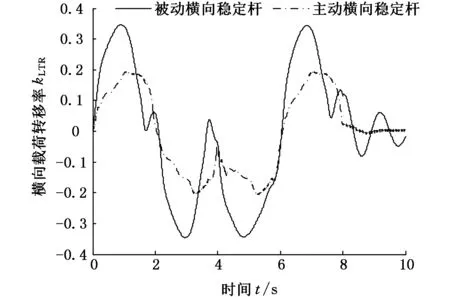
图11 横向载荷转移率响应曲线(双移线工况)
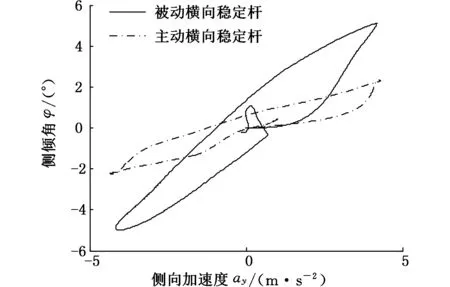
图12 侧向加速度与侧倾角的关系图(双移线工况)
由图9、图10可知,采用主动横向稳定杆将车辆的最大侧倾角与最大侧倾角速度分别控制在1.8°与2.2(°)/s。而被动横向稳定杆的车辆最大侧倾角与最大侧倾角速度分别为4.2°与6.2(°)/s。故采用主动横向稳定杆的车辆相对于被动横向稳定杆的车辆在侧倾角与侧倾角速度方面分别减小了57.1%与64.5%,且响应曲线平顺,超调量小。在图11中,采用被动横向稳定杆车辆的横向载荷转移率(LTR)峰值在0.35,而采用主动横向稳定杆的LTR峰值为0.2。相对被动式而言,主动横向稳定杆在LTR方面减小了42.8%,这有助于防止车辆侧翻及改善轮胎的垂直力。由图12发现,在转向盘转角双移线输入下,采用主动横向稳定杆的车辆的侧向加速度的取值范围为-5~5m/s2,侧倾角的取值范围为-2°~2°。采用被动横向稳定杆的车辆的侧向加速度的取值范围为-5~5m/s2,侧倾角的取值范围为-5°~5°。对照图4可以发现,采用主动横向稳定杆车辆的侧倾角与侧向加速度的变化关系与所提出的两者理想关系具有较好的一致性,使得驾驶员能够保持一定的侧倾感。这有利于转向行驶的车辆在侧倾角增大时,驾驶员通过自身修正来避免车辆侧翻,从而提高车辆的行驶安全性。
4.2 鱼钩工况
由于鱼钩转向工况是汽车侧翻试验中最恶劣的行驶工况之一,常用于测试车辆在极限工况下的侧倾稳定性。本文也采用鱼钩转向输入(转向盘转角输入如图13所示)对车速为80km/h、行驶在附着系数为0.8的良好路面上的车辆进行仿真试验。
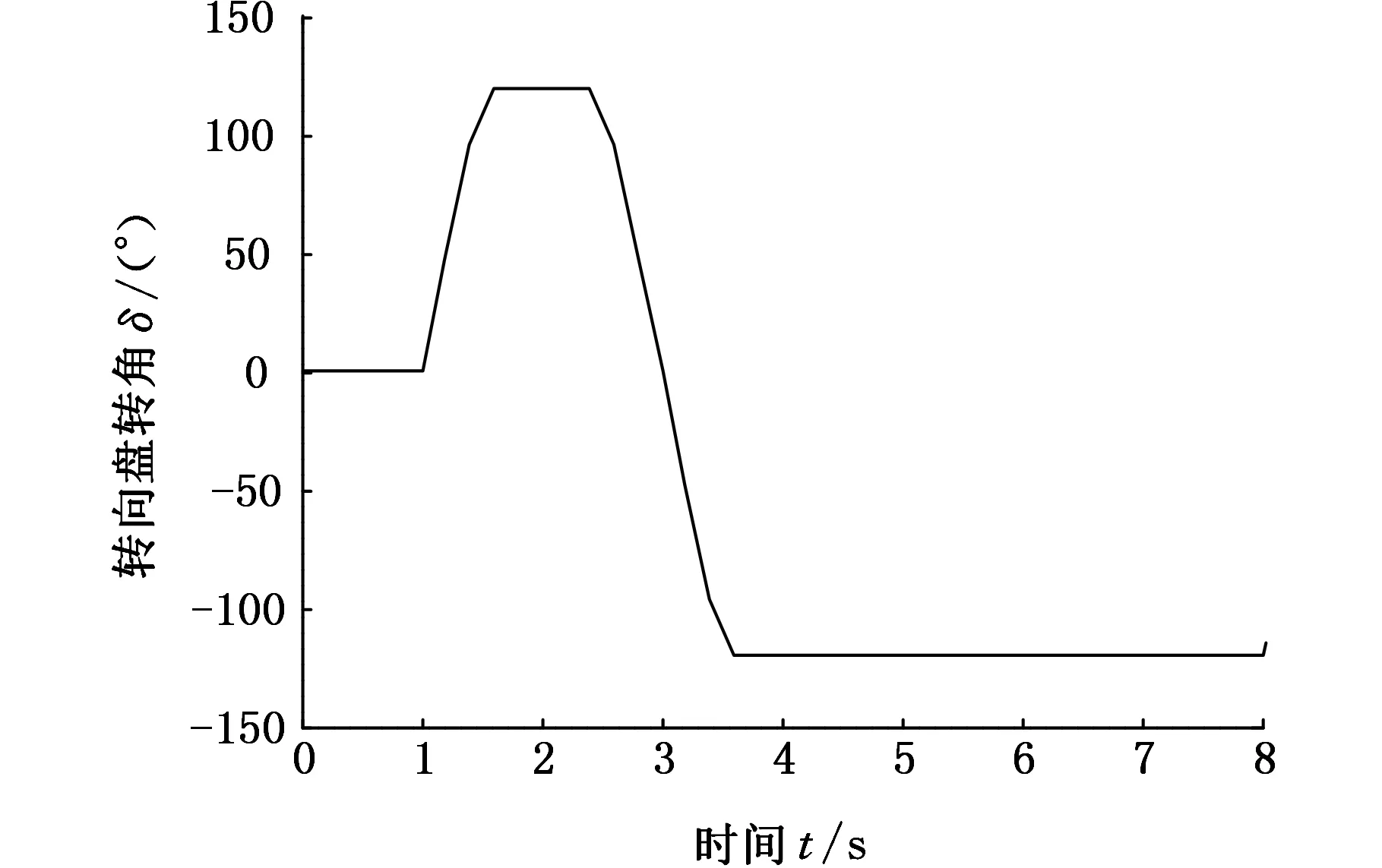
图13 转向盘转角鱼钩输入
由图14、图15对比可知,采用本文设计的主动横向稳定杆相比于被动横向稳定杆,在车辆的侧倾角与侧倾角速度方面减小均超过50%。更重要的是,由图16可知,采用被动横向稳定杆的车辆由于侧倾角过大,导致车辆LTR值接近1,即将出现车辆的侧翻;而采用主动横向稳定杆装置的车辆的LTR峰值不到0.6,故采用主动横向稳定杆控制的车辆具有较好的抗侧翻能力。
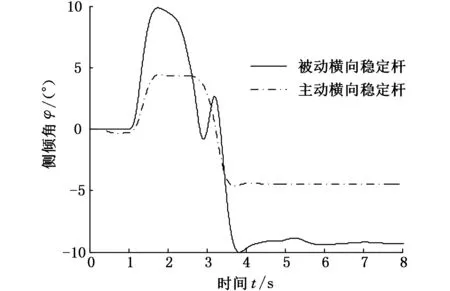
图14 车身侧倾角响应曲线(鱼钩工况)
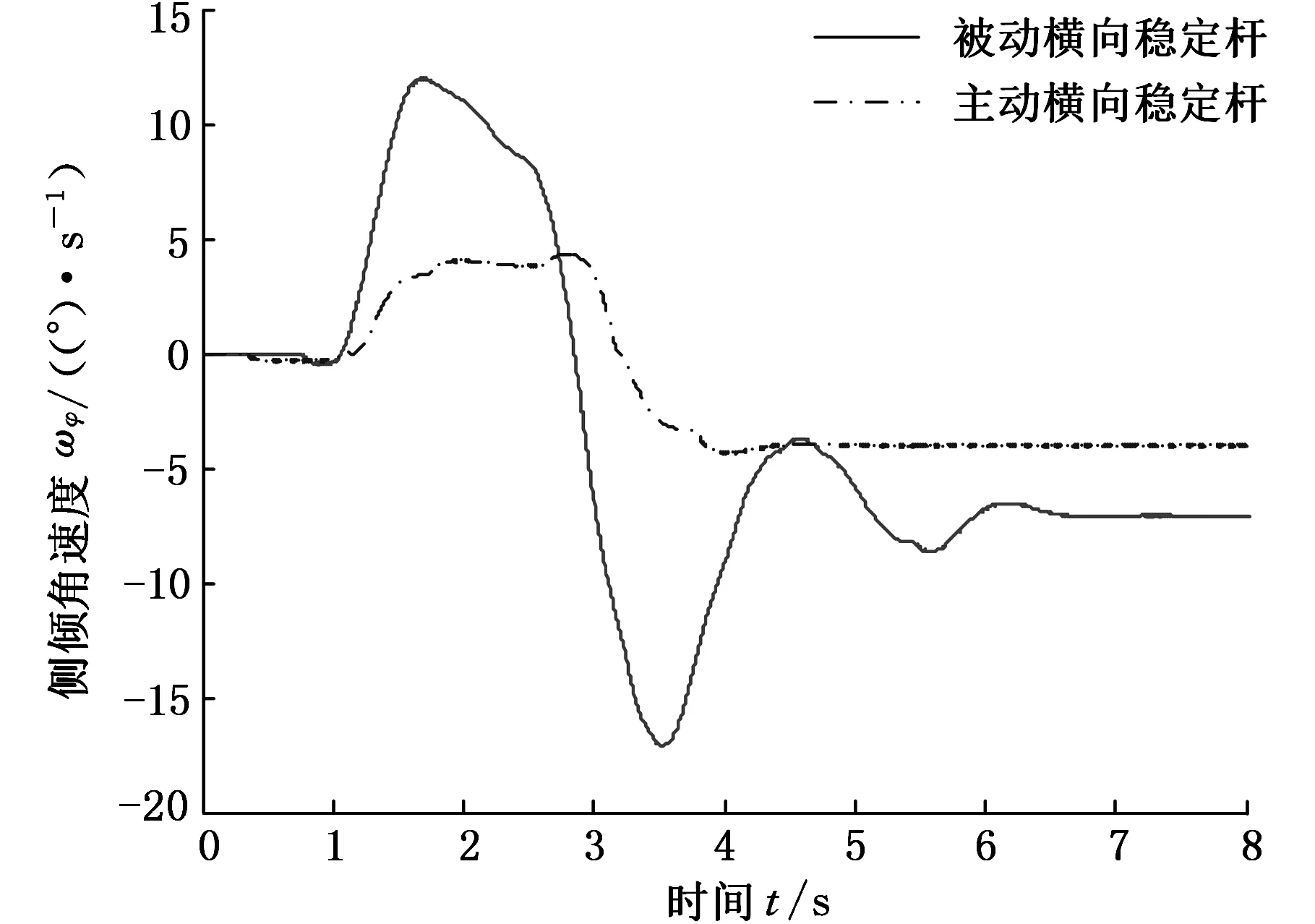
图15 车身侧倾角速度响应曲线(鱼钩工况)
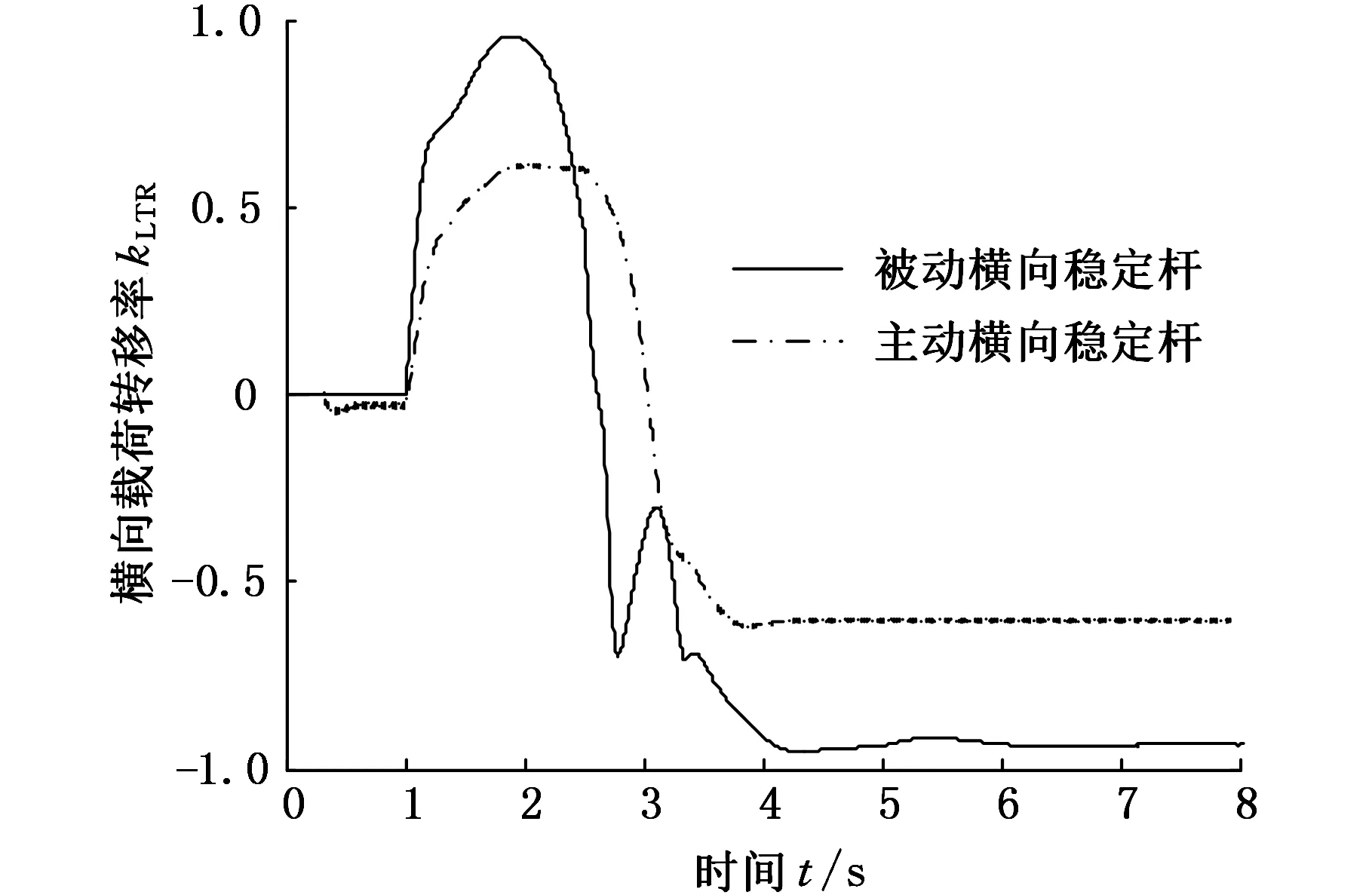
图16 横向载荷转移率响应曲线(鱼钩工况)
由图17可知,在鱼钩输入下,具有主动横向稳定杆的车辆的侧向加速度的大小为-8~8m/s2,侧倾角的大小为-4°~4°,两者间的变化关系与图4中的理想侧倾角与侧向加速度的关系具有较好的一致性,实现了对理想侧倾角的跟踪及满足良好的车辆侧倾反馈特性以实现驾驶员对车身姿态的判断,同时兼顾了车辆安全性与乘坐舒适性。而由被动横向稳定杆的侧向加速度与侧倾角的关系图可以发现,采用被动横向稳定杆控制的车辆侧倾角较大且存在较大波动,容易造成驾驶员紧张,同时存在侧翻的危险,故不能有效保证车辆的安全性与乘坐舒适性。
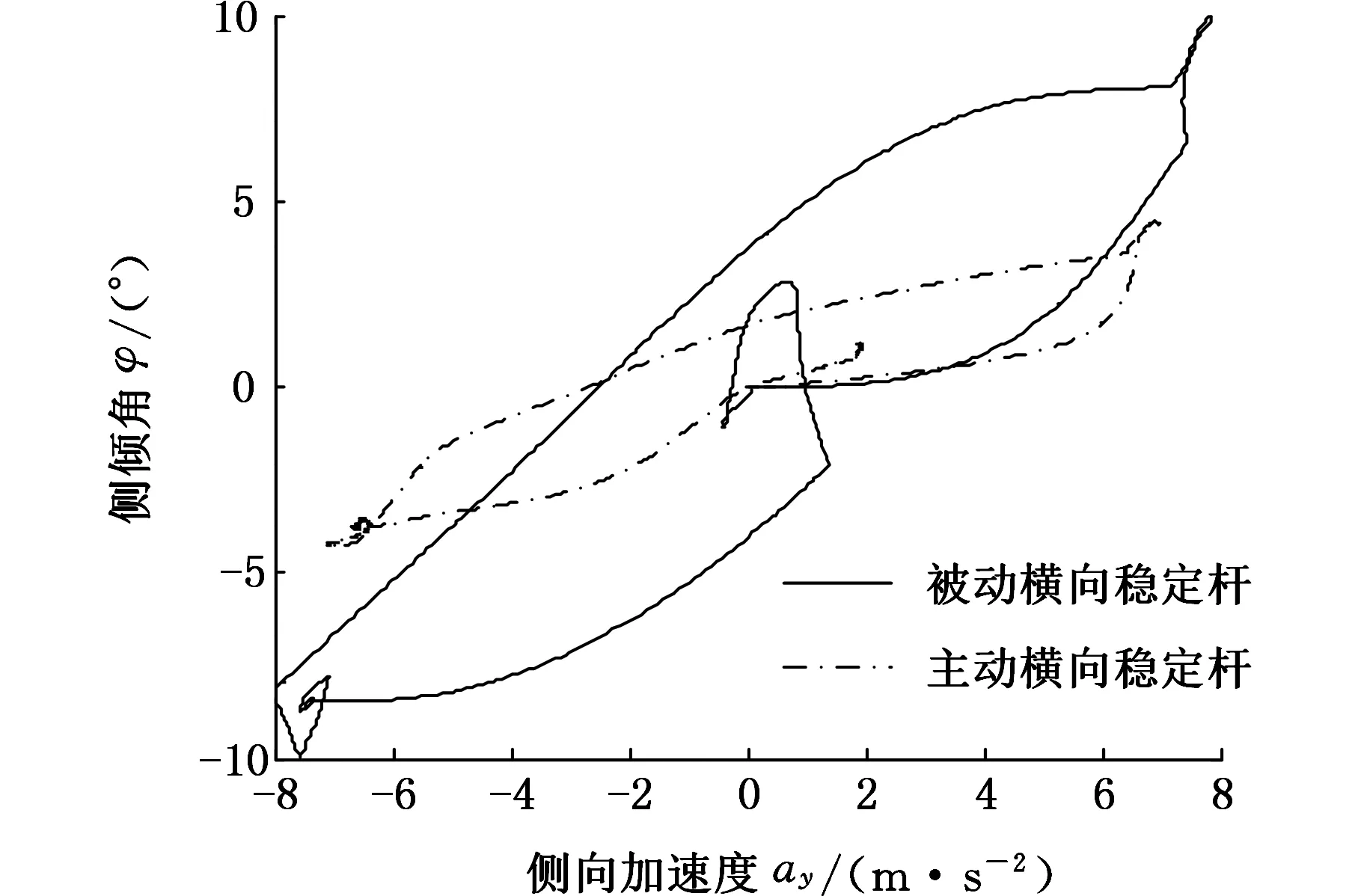
图17 侧向加速度与侧倾角的关系图(鱼钩工况)
5 结论
(1)针对车辆在急转方向且转角较大时,容易发生侧翻的特点,自主设计了电动式主动横向稳定杆装置控制车辆侧倾。即ECU根据车辆的运行工况控制电机的输出转矩,通过谐波齿轮机构使得横向稳定杆产生合适的反侧倾力矩来控制车辆的侧倾,有效避免车辆出现侧翻。
(2)由于车辆在侧倾中存在非线性、时变性的特点,运用滑模变结构控制理论设计了滑模控制器,来实现对理想侧倾角的跟踪。
(3) 采用双移线与鱼钩工况进行仿真试验,通过仿真试验发现,采用AARB的车辆能有效控制车辆的侧倾,保证车辆侧倾时具有良好的反馈特性,有效提高了车辆行驶的安全性与乘坐舒适性。
[1] 褚端峰,李刚炎.半主动悬架汽车防侧翻控制的研究[J]. 汽车工程, 2012, 34(5):400-432.ChuDuanfeng,LiGangyan.AResearchonAnti-rolloverControlforVehicleswithSemi-activeSuspension[J].AutomotiveEngineering, 2012, 34(5):400-432.
[2]YimS,ParkY,YiK.DesignofActiveSuspensionandElectronicStabilityProgramforRolloverPrevention[J].InternationalJournalofAutomotiveTechnology, 2010, 11(2):147-153.
[3]LiQ,ShiG,WeiJ,etal.YawStabilityControlofActiveFrontSteeringwithFractional-orderPIDController[C]//InformationEngineeringandComputerScience(ICIECS).Qingdao, 2009:1-4.
[4]LuJ,MessihD,SalibA.AnEnhancementtoanElectronicStabilityControlSystemtoIncludeaRolloverControlFunction[J].SAEPaper,2007(1):809-813.
[5]Gosselin-BrissonS,BouazaraM,RichardMJ.Des-ignofanActiveAnti-rollBarforOff-roadVehicles[J].ShockandVibration,2009,16(2):155-174.
[6]CronjéPH,ElsPS,ImprovingOff-roadVehicleHandlingUsinganActiveAnti-rollBar[J].JournalofTerramechanics, 2010, 47(3):179-189.
[7]GaffneyEF.HighEfficiency2ChannelActiveRollControlSystem[J].SAEPaper, 2009-01-0222.
[8] 唐新蓬,段小成.汽车侧倾稳定主动控制系统的仿真研究[J],汽车技术,2008(8):23-27.TangXinpeng,DuanXiaocheng.SimulationandStudyofVehicleRollActiveControlSystem[J].AutomobileTechnology, 2008(8):23-27.
[9] 周兵,吕绪宁,范璐,等.主动悬架与主动横向稳定杆的集成控制[J].中国机械工程2014,25(14):1978-1983.ZhouBing,LüXuning,FanLu,etal.IntegratedControlofActiveSuspensionSystemandActiveRollStabilizer[J].ChinaMechanicalEngineering, 2014,25(14):1978-1983.
[10]VargaB,NemethB,GasparP.ControlDesignofAnti-rollBarActuatorBasedonConstrainedLQMethod[C]//InternationalSymposiumonComputationalIntelligenceandInformatics.Budapest, 2013:31-36.
[11] 李俊伟,唐应时,王为才,等. 应用变刚度横向稳定杆的客车侧倾控制[J].现代制造工程,2012(8):12-16.LiJunwei,TangYingshi,WangWeicai,etal.RollMotionControlofBusBasedonVariableStiffnessAnti-rollBar[J].ModernManufacturingEngineering, 2012(8):12-16.
[12] 胡久强, 陈显莉, 罗亮,等. 基于MATLAB的汽车侧倾角刚度匹配及稳定杆设计[J]. 农业装备与车辆工程, 2013, 51(7):21-24.HuJiuqiang,ChenXianli,LuoLiang,etal.TheMatchingofVehicleRollAngleStiffnessandDesignofAnti-rollBarBasedonMATLAB[J].AgriculturalEquipment&VehicleEngineering,2013, 51(7):21-24.
[13]Lindvai-SoosD.FunctionDevelopmentProcessoftheElectricAntiRollStabilizerEARS[R].Ontario:ProjectHouseofMagna,2008.
[14] 刘永信,陈志梅,方健,等.现代控制理论[M].北京:中国林业出版社, 2006.
(编辑 王旻玥)
ControlonAARBofVehicleBasedonSlidingModeVariableStructureTheory
ChenSong1,2XiaChanggao1SunXu2
1.JiangsuUniversity,Zhenjiang,Jiangsu,212013 2.NantongShippingCollege,Nantong,Jiangsu,226010
Inordertocontroltherollingofvehicle,AARBwasdesigned.Fornonlineartime-varyingcharacteristicsintherollmotions,aslidingmodecontrollerwasdesignedtotracktheidealrollangleonthebasisoftheproposedAARBandthecontroller,steeringsimulationswiththefishhookmaneuveranddoublelanechangemaneuverwerecarriedouttotestthevalidityoftheproposedcontrolstrategyintheaspectofrollcontrollingwithAARB.Stimulationsshowthatthemethodiseffectiveinreducingtherollingofthevehicleandhavinggoodfeedbacktothedriverforjudgingthevehiclebodyposturecomparedtothepassiveanti-rollbar.Therefore,thesafetyandcomfortofthevehiclewithAARBisgreatlyimproved.
activeanti-rollbar(AARB);roll;slidingmodecontrol;safety
2016-06-21
国家自然科学基金资助项目(51575001);江苏省普通高校研究生科研创新计划资助项目(CXLX12_0629)
U461
10.3969/j.issn.1004-132X.2016.23.022
陈 松,男,1981年生。江苏大学汽车与交通工程学院博士研究生,南通航运职业技术学院交通工程系讲师。主要研究方向为汽车系统动力学与控制。发表论文10余篇。夏长高,男,1965年生。江苏大学汽车与交通工程学院教授、博士研究生导师。孙 旭,男,1974年生。南通航运职业技术学院交通工程系副教授、高级工程师。
猜你喜欢
大灰狼画报(2022年7期)2022-08-06
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
科技与创新(2020年8期)2020-05-08
北京汽车(2019年5期)2019-11-07
模具制造(2019年7期)2019-09-25
小读者·爱读写(2018年8期)2018-08-04
诗潮(2017年6期)2017-11-25
汽车文摘(2015年11期)2015-12-02
汽车零部件(2014年5期)2014-11-11