水中人工心脏泵用磁轴承系统的模型及控制研究
2016-12-23 02:59孙坤,陈琛
制造业自动化 2016年7期
孙 坤,陈 琛
(苏州大学 机电工程学院,苏州 215021)
水中人工心脏泵用磁轴承系统的模型及控制研究
孙 坤,陈 琛
(苏州大学 机电工程学院,苏州 215021)
提出水环境下磁悬浮血泵转子运动模型,将水对泵转子的作用等效成弹簧阻尼器,利用ADAMS与Simulink联合仿真;并针对水中磁悬浮血泵,通过分析并调整PD控制器的微分系数,实现在保证转子稳定性能的同时,改善转子位移信号。
人工心脏泵;阻尼器;PD调节;改善信号
0 引言
磁轴承由于具有无机械摩擦、无接触磨损、无需润滑、定位精度高、转速高且对环境无污染[1]等优点逐渐被人工心脏[2]、电主轴机床[1]等领域所应用。作为典型的开环非稳定系统,电磁轴承通过主动控制器,利用可控电磁力为悬浮转子提供高精度的定位控制和振动阻尼控制[3]。
人工心脏用电磁轴承是在血液中工作的,但目前其建模以及控制器设计与一般工业用电磁轴承类似[4],都是在空载环境下所进行的,再经过增益等方面的调节,使得血泵在液体中运行稳定。建模上的误差无疑会导致磁悬浮系统运行性能较差,也阻碍了人工心脏用磁轴承的研制进程。另外对于磁悬浮血泵这类不规则的几何模型,在水、血液等流体中的运动模型目前也很少有理论上研究。针对苏州同心医疗公司的新一代磁悬浮人工心脏泵,如图1所示,本文提出了水中磁悬浮系统模型,通过在ADAMS中建立机械模型,与Simulink联合仿真。针对所使用的经典PD控制,考虑到水中磁轴承系统本身存在阻尼,对微分环节作适当减弱,以改善信号输出。

图1 同心医疗China Heart III磁悬浮人工心脏
1 磁悬浮系统理论建模
磁悬浮血泵同一般主动磁轴承原理相同,由径向两自由度(或四自由度)和轴向一自由度构成,因转速不是太高且为刚性转子,完全可以忽略陀螺效应,故其可以解耦为单自由度磁悬浮系统分别进行控制,这样也方便了简单PD控制器的应用。
对于水中磁悬浮系统,本文根据[1]关于单自由度磁悬浮系统模型,以及将水冲击力视为平衡点附近位移和速度的函数[5],写出当泵转子在静平衡位置附近作小振动时,运动方程可以写为:

其中,m为泵转子质量,x为转子径向位移,kx为位移-力刚度系数,ki为电流-力刚度系数,kxx、kxv、kxv、cxx和cxy分别为转子受水影响的刚度和阻尼系数。
从式(1)可以看到,一般磁悬浮只有负刚度,缺少阻尼项,所以是典型的开环非稳定系统,而PD控制的比例与微分环节实质上就是调整磁悬浮系统的刚度,并增加其阻尼成分[6]。而对于水中的磁悬浮泵,水对泵转子恰好可以增加其阻尼项。
该型人工心脏用磁悬浮转子为圆环状,其顶端焊有叶片,水、血液等流体对该类型物体的作用较为复杂,很难从理论上进行推导研究,故本文将流体对泵转子的作用等效为弹簧阻尼力。根据[7]及本磁悬浮系统结构参数,如表1所示,可以大致计算出c=30Ns/m,k=0.5N/m(忽略y方向对x方向耦合)。本文再对该泵环路测试,得到环路传输特性图(如图2所示)。从图中可以看出,水载测试中,其阻尼增加值与计算值偏差不大,说明水中泵转子运动模型较为合理。初取c=24Ns/m,k=0.5N/m,以便在ADAMS与Simulink仿真中作微调。
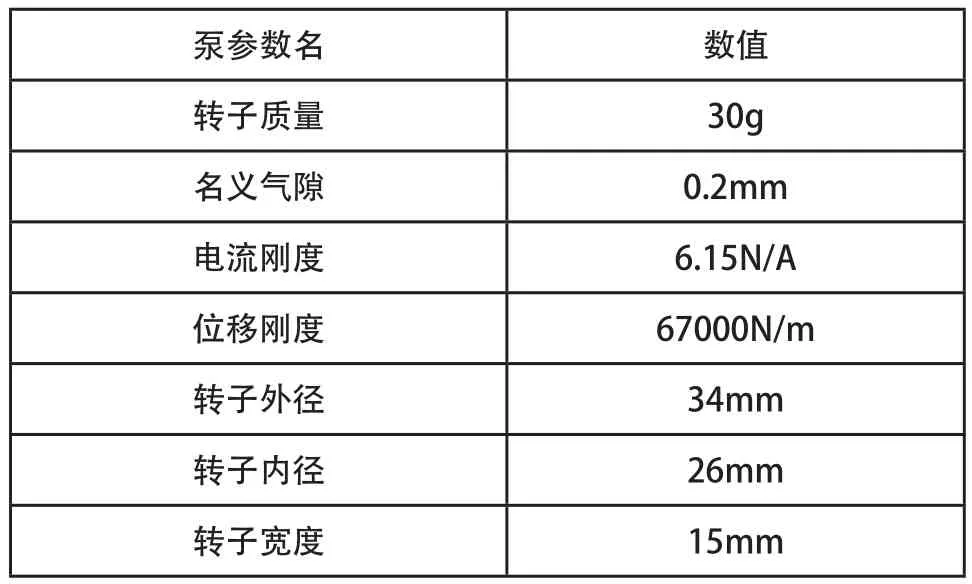
表1 系统结构系数

图2 人工心脏泵环路传输特性
2 ADAMS与Simulink联合仿真
磁轴承系统研究一般把其力学系统看作传递函数,通过MATLAB/Simulink对磁悬浮轴承整体系统进行仿真的,但是这种仿真在建立系统机械模型时,尤其是在液体环境下,不够精确,而ADAMS能够更好地综合考虑各个因素对磁悬浮轴承整个系统的影响,对现实的实验也具有更好的指导意义[8]。
首先在SolidWorks建立磁悬浮泵的几何模型,把它导入ADAMS里面。在ADAMS中定义定子固定约束,转子为平面副,并设置与定子碰撞接触。为了考虑水对泵转子的作用,在泵转子与定子之间建立径向均布5个弹簧拉压阻尼器,其阻尼即为上文所计算值。设置状态变量有x、y方向径向力x、y方向位移,并将x、y方向径向力设为输入变量,x、y方向位移设为输出变量。
控制系统是用MATLAB/Simulink模块来设计,由上述可知,磁悬浮泵式不稳定的,因此采用PD控制对系统仿真,环路还包含一个相位超前环节以及传感器低通、功率放大器环节,如图3所示。图4(a)是未考虑阻尼时的阶跃响应,图4(b)是考虑了阻尼的响应,可以发现考虑阻尼时的响应时间稍慢些,但超调量很小。说明水抑制了泵转子的振荡,改善了泵转子的性能。并通过对该泵进行空载与水载起浮试验(如图5所示,a.空载,b.水载),可以看出水载时的起浮较为平稳,大约需要5ms,而空载时稍快一些。通过微调ADAMS模型中的阻尼值至c=20Ns/m,响应时间相当吻合。

图3 磁悬浮系统ADAMS/Simulink联合仿真模块图

图4 磁悬浮系统阶跃响应模块
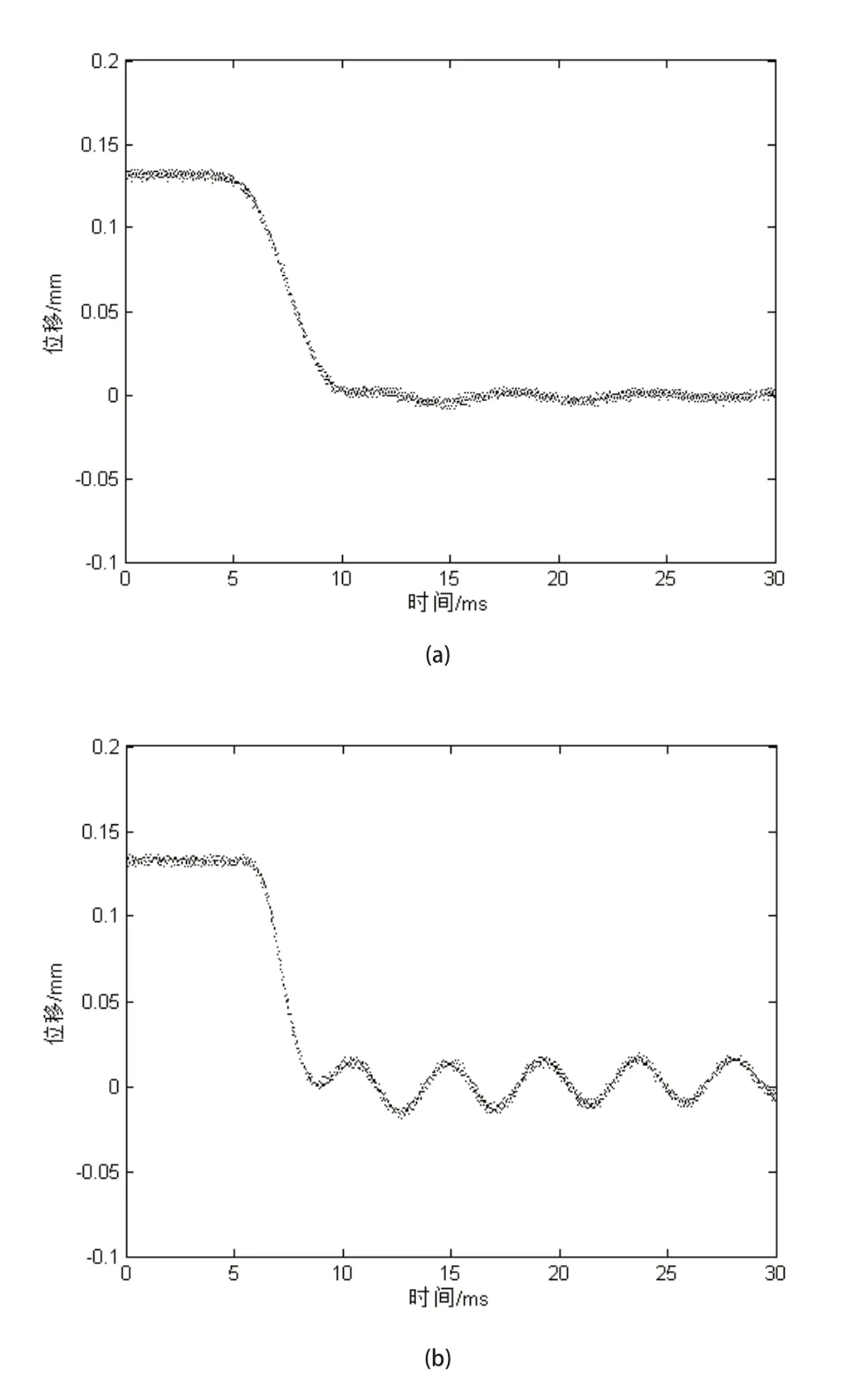
图5 磁悬浮泵空载与水载起浮试验
3 PID微分环节的调节
从图6(a)可以看出,空载时的转子起浮是稳定的,满足性能要求,只是在起浮后期有170ms的振荡,而水载时图6(b)几乎没有振荡。因此,我们可以针对该人工心脏泵,考虑放宽微分环节,以此减弱微分对高频噪声放大的影响。本文共设置了递减的4个微分系数Td=0.0013288、0.0011、0.00077和0.00044(通过改变电阻值),分别探究泵转子起浮性能及位移信号的改善程度。

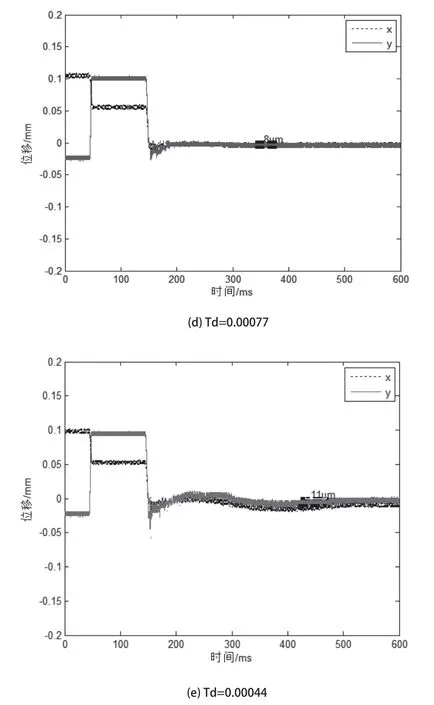
图6 各不同条件下泵转子全起浮过程位移输出(a.空载, b-e.水载)
从图中可以看出,在Td降至0.0011时,起浮很好,并未出现振荡,位移信号有所改善。当降至0.00077时,起浮仍然稳定,稍有振荡,但位移信号含噪量明显降低。再降至0.00044时,有明显振荡,振幅达到50um,位移信号未出现改善,此时表明系统已出现阻尼不足,趋向不稳定,更起不到对输出信号的改善作用。因此表明,针对水中磁悬浮运行的控制系统可以空载控制系统为基础,且充分利用水中模型的特点,适当调节微分环节,达到实现稳定性能良好的同时改善输出信号质量。
4 结论
本文针对人工心脏泵用磁悬浮系统,建立了水中磁悬浮系统模型,引入阻尼项,并借助ADAMS与Simulink联合仿真,表明了水对磁悬浮泵转子振荡的抑制作用。又通过调节空载下PD控制器的微分项,减弱对微分的需要,探索水的作用对于磁悬浮系统阻尼的放宽程度,从而在保证泵转子性能稳定且良好的同时降低位移噪声。
【】【】
[1] Gerhard Schweitzer, Eric H. Maslen.Magnetic Bearings-Theory, Design,and Application to Rotating Machinery[M]. New York: Springer,2009.
[2] Nojir, C.,Kiijima,T.,Maekawa,J..Recent Progress in the Development of Termo Implantable Left Ventricular Assist System[J].ASAIO Journal,1999,45(3):199-203.
[3] 谢振宇,张景亭,高华,等.带阻尼器磁悬浮轴承转子系统的不平衡响应[J].中国机械工程,2009,20(3):327-330.
[4] 雷世东,袁小阳.人工心脏电磁轴承概念设计的知识基础[J].机械科学与技术,2004,23(3):293-296.
[5] 闻邦椿,顾家柳,夏松波,等.高等转子动力学[M].北京:机械工业出版社,2000.
[6] A. Chiba,T.Fukao,O.Ichikawa. Magnetic Bearings and Bearingless Drives[M].Oxford:Elsevier,2005.
[7] 董跃.液压轴承油膜稳定性分析[J].机电产品开发与创新,2012,25(5):155-157.
[8] 冯恒.磁悬浮轴承系统仿真研究[D].南京航空航天大学,2010.
Research on model and control of magnetic bearing applied in artifi cial heart in the water
SUN Kun, CHEN Chen
TH133.3
A
1009-0134(2016)07-0005-04
2016-03-19
孙坤(1992 -),男,江苏涟水人,硕士研究生,研究方向为人工心脏、磁悬浮轴承控制以及有限元仿真等。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
新传奇(2022年6期)2022-02-22
小学科学(学生版)(2021年4期)2021-07-23
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
数学年刊A辑(中文版)(2021年4期)2021-02-12
自我保健(2019年11期)2020-01-09
科学导报(2018年17期)2018-05-14
军事文摘(2017年16期)2018-01-19