
气体炮发射控制系统设计与分析
2016-12-22 06:27赵俊利李大勇王立君
中北大学学报(自然科学版) 2016年5期
赵俊利,李大勇,王立君,王 妍
(1. 中北大学 机电工程学院,山西 太原 030051; 2. 哈尔滨建成集团有限公司,黑龙江 哈尔滨 150030;3. 中国人民解放军边防学院,陕西 西安 710108)
气体炮发射控制系统设计与分析
赵俊利1,李大勇1,王立君2,王 妍3
(1. 中北大学 机电工程学院,山西 太原 030051; 2. 哈尔滨建成集团有限公司,黑龙江 哈尔滨 150030;3. 中国人民解放军边防学院,陕西 西安 710108)
为了解决气体炮发射控制系统的可靠性问题,提出一种由活塞组和多个密闭腔室组成的新型气体炮发射控制系统的设计方案. 简要介绍发射控制系统的总体组成以及工作原理. 使用绘图软件AutoCAD绘制气体炮的二维图,对控制系统的受力情况动态分析并将其抽象为数学模型进行理论计算,利用MATLAB软件进行计算机仿真,得到系统中各部分的动力学关系和关键的参数. 经过对仿真结果的分析,验证新方案在原理上的可行性,最终证明这种新型发射控制系统能够达到预期的目标. 新方案为同类机构的设计提供了一种新思路和理论依据.
机械设计; 气体炮; 发射; 软控制
气体炮是一种利用气体介质膨胀做功来推动试验弹高速运动的发射系统[1],常用于实验室用冲击加载装置[2]或代替载机空投救生伞进行救生伞强度试验. 与常规火炮相比,气体炮虽然威力较小,但是它具有一些常规火炮无法替代的优点. 例如,其发射时的炮膛温度远低于一般火炮,可以用于发射试验仪器、 救援物资等不耐高温材料. 用于消防领域的气体炮称为气动灭火炮,它可以远距离将装有干粉灭火剂的灭火弹发射到火场,爆破灭火. 气动灭火炮可用于高层建筑灭火,森林远程灭火,船舶码头灭火和油气罐灭火等[3-5].
气体炮的发射控制方式直接影响到炮弹的内弹道曲线[6]和出炮口速度,因此发射控制系统是气体炮的核心机构[7-8]. 发射控制方式一般分为发射软控制[9-10]和卡锁控制[11]两种. 软控制是将活塞组、 储气室、 单向阀三者巧妙地组合起来,通过活塞组的移动达到用低气压控制高气压的效果; 卡锁控制是将弹丸尾部直接与气室连通,发射前用卡锁将弹丸固定,发射时打开卡锁,高压气体直接把弹丸推出. 对膛压较高的空气炮来说,这种控制方式存在卡锁受力过大、 开锁困难、 弹尾漏气等缺点. 与卡锁控制相比,发射软控制方式气密性好、 不需要考虑卡锁力,具有可靠和发射稳定的特点. 然而软控制普遍有发射时气压不稳定的缺点,原因在于随着气室气压降低,活塞组会由于自身重力作用或炮体振动等因素下落堵住炮尾连接孔,导致气流中断影响发射效果.
通过以上论述可知,传统的发射控制系统存在一系列的缺陷,为了有效地克服这些缺点,文中设计了一种新型发射控制机构. 在旧方案的基础上做了大量的改进,通过增加活塞组的气动锁紧功能有效地克服了旧方案发射时气压不稳定、 活塞组在发射过程中下落等缺点,并通过理论计算和计算机仿真方法验证新方案的正确性.
1 发射控制系统设计
1.1 结构简介
气体炮气路控制室结构如图 1 所示,它由控制室箱体、 控制室内筒、 调压筒、 活塞组、 活塞连杆、 阀门等结构组成. 炮尾连接孔是气室和炮尾的连接通道,高压气体由此进入炮尾完成发射过程. 炮尾连接活塞固连于活塞连接杆1,是打开和关闭炮尾连接孔的机构,下端安装O型圈起密封作用. 连接杆1上端固连内筒小活塞和内筒大活塞,大活塞上端安装O型圈起密封作用. 这两个活塞可以在控制室内筒中滑动. 连接杆与3个活塞均为刚性连接,位置由控制室内筒及内筒定位器确定,它们之间的相对位置不变. 单向阀是约束气体流向的装置,限制气体只能从它的一侧流向另一侧,反向不通. 单向阀1限制气体只能由图示位置的内筒内侧流向外侧,反向不通; 单向阀2限制气体只能由图示位置的内筒小活塞下端流向上端. 外泄压孔一侧连接调压筒,另一侧与外部大气相连,用于排出内筒上腔高压气体; 内泄压孔一侧连接充气孔,与内筒大活塞上方空间相通,另一侧连接调压筒,是连接内筒上腔与调压筒的通道. 活塞1和活塞2固连于连接杆2上,均为刚性连接,无相对滑动. 活塞1直径稍大,两个活塞可以随连杆在充气筒内运动. 发射阀可以用来向调压筒充气,推动调压筒内活塞系统运动,将活塞2推至最上端. 发射时打开发射阀,高压气体将活塞1快速顶回最下端与缓冲垫圈相撞. 限压阀的作用是限制发射后活塞1与活塞2之间的气压,当气压增大到限压阀上限时自动放气. 这样调压筒内的气压就不会太高,为打开泄压阀提供方便,并且可以限制向调压筒充气的最大气压. 充气阀是向整个气体炮充气的总阀门,主要作用是流经充气孔、 单向阀1向气室充入高压发射气体. 发射结束后打开泄压阀,排出调压筒内多余气体. 控制室内筒装在控制室箱体内部,由内筒定位器、 定位挡圈将其固定.

图1 气路控制室结构图
1.2 工作原理
气体炮气路控制系统的工作过程分为4个阶段,分别是起始阶段、 调压筒充气阶段、 气室充气阶段和发射阶段. 其工作过程如图 2 所示.
1) 起始阶段. 如图 2(a) 所示,调压筒大活塞处于调压筒最下端,内筒大活塞位于控制室内筒上部,炮尾连接活塞打开.
2) 调压筒充气阶段. 如图 2(b) 所示,通过发射阀向调压筒充气,以致活塞组被推到调压筒最上端,设空间1、 空间2、 空间3内的气压分别为p1,p2,p3. 空间2和空间3通过内泄压孔相连,所以p2=p3.
3) 气室充气阶段. 如图 2(c) 所示,设空间1, 2, 3, 4, 5内气压分别为p1,p2,p3,p4,p5. 打开充气阀进行充气,一部分高压气体通过内泄压孔进入空间2; 另一部分气体通过充气孔将内筒大活塞顶下,充满空间3. 此时,内筒活塞组位于最下端,炮尾连接活塞将炮尾连接孔堵住. 随着充气过程的进行,气压逐渐升高. 当充气压力p3升高到某一数值时,单向阀1被打开,气体进入空间5并且经过气室连接孔进入气室. 当p5足够大时,单向阀2被打开,高压气体进入空间4.
图2 气路控制室工作过程图
4) 发射阶段. 如图2(d)所示,空间2, 3, 4, 5内气压分别为p2,p3,p4,p5. 将发射阀打开,调压筒内活塞1下端气体快速喷出,气压p1降低至标准大气压p0. 因为活塞1的横截面积比活塞2大,所以空间2内高压气体对活塞1的作用力大于活塞2,导致调压筒内整个活塞系统移动至最下端. 此时,保持p2不变,空间3内高压气体经内、 外泄压孔流出导致p3迅速降低至大气压. 空间4内高压气体对内筒大活塞的作用力大于对小活塞作用力,所以推动活塞系统上移,炮尾连接活塞被拔出. 同时,空间5内的气压对内筒小活塞产生向上的推力,使活塞组保持在内筒最上端,防止活塞组下落堵住炮尾连接孔. 气室内高压气体通过炮尾连接孔进入炮尾,推动弹丸运动. 随着时间的推移,空间5内的气压逐渐减小导致空间4内气体进入空间5,空间4内气压随之降低. 发射结束后打开泄压阀,释放出空间2内的高压气体,使控制室达到初始状态.
2 仿真分析
2.1 建立力学模型
2.1.1 基本假设
设活塞1、 活塞2、 内筒大活塞、 内筒小活塞的横截面直径分别为d1,d2,d3,d4,炮尾连接活塞的上表面直径(大径)为d5,下表面O型圈中径为dx; 内筒大活塞的最大运动距离为H,内筒大、 小活塞之间的连杆长度为h,活塞连接杆1、 2的各段直径均为d; 单向阀1、 单向阀2、 限压阀的启动压力分别为pd1,pd2,pd3, 气室气压为p5,标准大气压为p0. 控制室的重要结构尺寸如图 2(a) 所示. 调压筒充气阶段,通过发射阀向调压筒充气,使调压筒内气压达到最大值,即p1=pd3+p0. 气室充气阶段,打开充气阀进行充气,空间3内的气压为p3. 充气过程中,控制室内各腔室气压如图 2(c) 所示. 其中,p5=p3-pd1,p4=p3-pd1-pd2,p2=p3,p1=pd3+p0. 充气结束后p3的最大值为pt. 假设空气炮工作过程各腔室内无气体泄漏,整个过程在等温等熵条件下进行[12-14]. 充气平缓,即充气气压p1,p3匀速增加. 不计各部件工作过程中的弹性形变,忽略活塞与筒壁接触面之间的摩擦力.
2.1.2 力学模型的建立
发射控制系统工作过程中各活塞组的运动比较复杂,为了更清楚地表达调压筒活塞组和控制室内筒活塞组在不同时刻的空间位置,绘制了它们整个工作过程的动作时序图,如图 3 所示.

图3 动作时序图
气室充气过程:
通过如图 4(a) 所示的受力分析,得到调压筒充气结束后气体压力对活塞组的合作用力F1与调压筒充气压力p1及气室充气压力p3的关系. 规定F1向上为正方向.

(1)
式中:p1为调压筒充气压力,它在调压筒充气过程中一直升高直到限压阀开启为止,其最大值为pd3+p0; 气室充气前空间3内气压p3最小,其值为标准大气压p0,充气结束后气压最大,其值为pt.
(2)
气室气压
(3)
式中:

且均为常数.γ为气体绝热指数,V0,V4分别为空
间4的初始体积和充气过程的体积,p0为标准大气压,pt为气室最大充气压力. 为了使充气时气体不进入炮膛,应满足条件λ≤pd1+p0. 因为如果λ>pd1+p0,在炮尾连接活塞堵住炮尾连接孔之前充气压力p3将会达到pd1+p0. 开启单向阀1,导致气体进入空间5,然而此时炮尾连接活塞没有堵住炮尾连接孔,充气气体会经过炮尾连接孔进入炮膛.
由式(2),式(3)可以推导出控制室气压对内筒活塞组的作用力F2与p3的关系. 内筒活塞组受力情况如图 4(b), 4(c)所示,规定向上为正.
图4 充气过程中活塞组受力分析图
(4)
发射时调压筒活塞组受力关系如图 5(a) 所示,受力大小F3与p1的关系为(规定向上为正)
(5)
式中:p1不断减小直至p0. 调压筒下降到位后p3由pt不断减小直至p0. 此时内筒活塞组受力情况如图5(b)所示,气体压力对内筒活塞组施加开启力F2k,其大小为

(6)
空间4压力p4与气室压力p5之间的关系为
(7)

发射时内筒活塞组开启后上升速度极快,所以忽略其上升时间,直接分析其上升到位后的受力情况. 此时,气体压力对活塞组起到锁紧作用,内筒活塞组受力情况如图5(c)所示,锁紧力大小为

(8)
式中:气室压力p5不断降低直至p0.
关键作用力:
调压筒最大充气压力p1(max)=p0+pd3;
图5 发射过程中活塞组受力分析图
气室充气时,气压对调压筒活塞组最小锁紧力
发射时气压对调压筒活塞组最大开启力
气室最大充气压力
p5(max)=pt-pd1;
气室充气时,气压施加于内筒活塞组用于关闭炮尾连接孔的最小密封力
发射时气压对内筒活塞组最大开启力
发射后气压对内筒活塞组最小锁紧力

2.2 仿真结果
2.2.1 设定初始条件
d1=70 mm,d2=68 mm,d3=110 mm,d4=90 mm,d5=80 mm,d=30 mm,dx=68 mm,h=280 mm,H=200 mm,p0=0.101 MPa,pd1=0.6 MPa,pd2=1 MPa,pd3=0.8 MPa,pt=12 MPa,γ=1.4, 内筒活塞组质量M=20 kg,调压筒活塞组质量m=6 kg,重力加速度g=9.8 m/s2.
2.2.2 计算结果
根据式(1)~(8)及上述初始条件进行计算机仿真,得到以下计算结果. 图6(a)直观反应出气室充气过程中气室压力p5、 内筒压力p4随充气气压p3的变化规律,从而得出图6(b)控制室气压对内筒活塞组的作用力F2与p3的关系.
图6 充气过程内筒活塞组受力随充气压力变化规律

图7 发射前期内筒活塞开启力变化规律
发射时系统的受力关系如图 7,图 8 所示. 发射初期空间1内的气体瞬间释放,气压降低,调压筒活塞组开启. 气压对调压筒活塞组的开启力F3随空间1内气压p1的变化规律如图7(a)所示. 之后,空间3内的气体经内、 外泄压孔释放,其压强p3由pt迅速降至p0,内筒活塞开启力F2k随之升高,打开活塞.F2k随p3的变化规律如图7(b)所示. 气室中的气体进入炮尾推动弹丸运动,压力随之减小. 这个过程中空间4的压力变化规律如图8(a)所示; 内筒活塞组受到向上的锁紧力随气室压力的变化规律如图8(b)所示.
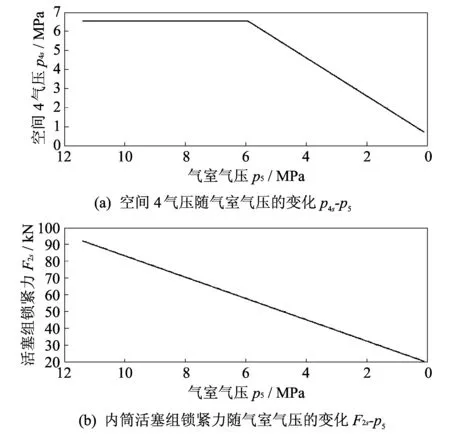
图8 发射过程内筒活塞锁紧力随气室压力变化规律
2.2.3 计算结果分析
对以上计算结果进行归纳,将直接影响机构性能的关键参数归纳于表 1,表 2 之中.

表1 调压筒关键参数
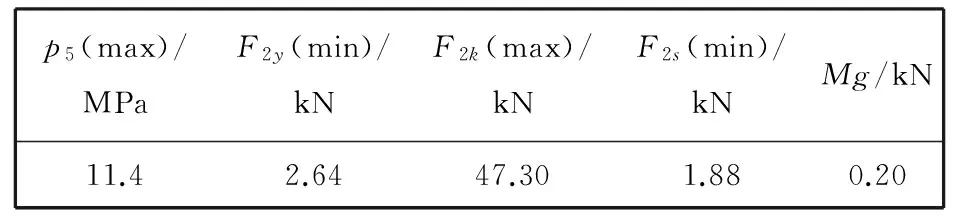
表2 控制室内筒关键参数
对比表 1,表 2 可以看出,调压筒最大充气压力p1(max)远小于气室最大充气压力p5(max). 单独分析表1和表2,气压对活塞组的作用力远大于活塞组自身的重力,所以活塞组的重力对其运动的影响可以忽略不计.
3 分析与讨论
通过对上述计算结果的分析,可以得出以下结论.
1) 新方案可以达到以小压力控制大压力的目的. 由表 1 可知,发射时发射阀内部气压等于调压筒最大充气压力0.9 Mpa, 压力小阀门容易开启. 气室压力为11.4 MPa, 高气压为发射提供强大的动力.
2) 确保工作过程的安全可靠性. 从表1可以看出调压筒充气过程活塞组的最小锁紧力约为其重力的8倍,使得在发射之前调压筒活塞组不会因为外界干扰因素而移动,保证了气室充气过程的安全性. 从表2可以看出气室充气过程中内筒活塞最小密封力为2.64 kN, 数值较大,可以确保充气过程不漏气; 发射过程中活塞最小发射锁紧力1.88 kN, 超过其重力的9倍,确保发射过程活塞组不会落下堵住炮尾连接孔.
3) 发射速度快. 表1中,调压筒活塞组最大开启力2.58 kN,而其重力只有0.06 kN, 所以活塞组回程加速度很大,开启速度快; 表2中,内筒活塞组最大回程力 47.3 kN 远大于其重力0.20 kN, 活塞组回程加速度大,开启速度快,发射迅速.
4 结 论
与传统的发射控制系统相比,新方案的技术关键及其功能改进主要体现在两个方面:① 与老方案相比增加了调压筒结构. 发射时用小气压p1(最大值0.9 MPa)控制大气压p2,p3(最大值12 MPa),这是一种放大法控制原理,安全可靠. ② 气体炮发射阶段在p4的作用下使空间4容积达到最大,对内筒活塞系统起到锁紧作用,避免炮尾连接活塞下落堵住炮尾连接孔,即新方案的锁紧功能. 并且锁紧力大于内筒活塞组重力的9倍,所以工作安全可靠. 这个创新点的技术关键是利用直径不同的内筒小活塞和内筒大活塞组成的活塞组在内筒中运动来改变空间4的容积,这也是新方案的设计思路. 在工程上,可以根据实际需要调整各部分结构尺寸,这种设计思想为发射控制系统的研发提供了一种新方法.
[1]季享文,韩志华,高春鹏. 气体炮试验技术研究[C]. 第六届中国航空学会青年科技论坛. 沈阳:中国航空学会,2014:1772-1778.
[2]王金贵. 气体炮技术[J]. 物理,1996, 25(9):558-564. Wang Jingui. The gas gun technology[J]. Physics, 1996, 25(9):558-564. (in Chinese)
[3]Tzenga J T, Abrahamian A S. Dynamic compressive properties of composites at interior ballistic rates of loading-experimental method[J]. Composites Engineering, 1995, 5(5):501-508.
[4] O’Dwyer J M.Projectile launching apparatus and methods for fire-fighting[P]. US:6860187,2005-03-01.
[5]Pang Y G, Liu S G. Simulation research on control system Beijing Institute of Technology Press and ballistic of a remote forest fire fighting cannon[C]. International Conference on Computer, Mechatronics, Control and Electronic Engineering (CMCE), IEEE,2010, 2:394-397.
[6]钱林方. 火炮弹道学[M]. 北京:北京理工大学出版社,2009.
[7]刘少刚,刘刚,赵丹,等. 气动发射灭火炮伴随管式击发装置研究[J]. 兵工学报,2013, 34(10):1318-1323. Liu Shaogang, Liu Gang, Zhao Dan, et al. Research on the associated-tube type firing mechanism for pneumatic fire-extinguishing cannon[J]. Acta Armamentarii, 2013, 34(10):1318-1323. (in Chinese)
[8] Rui X T, Yun L F, Wang H, et al. Experimental simulation forfracture of gun propellant charge bed[J]. Journal of China Ordnance Society, 2005, 1(2):151-155.
[9]赵华. 气压传动式软发射原理与技术研究[D]. 南京:南京理工大学,2006.
[10]黄洁,梁世昌,李海燕, 等. 二级轻气炮发射过程内弹道数值计算研究[J]. 空气动力学学报, 2013, 31(5):657-661. Huang Jie, Liang Shichang, Li Haiyan, et al. Numerical research on interior ballististics of the launch process of two-stage light gas gun[J]. Acta Aerodynamica Sinica, 2013, 31(5):657-661. (in Chinese)
[11]汪永忠, 王卫, 程涛, 等. 一种火炮自动卡锁装置设计分析[J]. 火炮发射与控制学报, 2005(3):36-38. Wang Yongzhong, Wang Wei, Cheng Tao, et al. Designing a locker device of an automatic gun mechanism[J]. Journal of Gun Launch and Control, 2005(3):36-38. (in Chinese)
[12]廖振强, 王涛, 徐世海. 武器气体动力学数值计算方法[M]. 北京:国防工业出版社,2005.
[13]王保国,刘淑艳,黄伟光. 气体动力学[M]. 北京:北京理工大学出版社,2005.
[14]沈维道,童均耕. 工程热力学[M]. 北京:高等教育出版社, 2007.
Design and Analysis of Gas-Gun Launching Control System
ZHAO Jun-li1, LI Da-yong1, WANG Li-jun2, WANG Yan3
(1. School of Mechanical Engineering, North University of China, Taiyuan 030051, China;2. Harbin Jiancheng Group Co. Ltd., Harbin 150030, China;3. PLA Brother Defence Academy, Xi’an 710108, China)
In order to solve the reliability problem of gas-gun launching control system, a new type of launching control system which consists of some pistons and cylinders is put forward, as well as the structure design and working principle is introduced briefly.This paper draws the 2D pictures of the gas-gun using the software AutoCAD, and transforms it to the mathematical model by stress analysis.The dynamic relationships and key data can be obtained by computer simulation by the MATLAB software.Though the analysis of calculation results, verify the feasibility of the design in principle. Finally it is proved that the new type of control system can achieve the desire requirements.
mechanical design; gas-gun; launch; pneumatic control
1673-3193(2016)05-0494-07
2016-02-15
赵俊利(1957-),男,教授,主要从事武器系统机动工程的研究.
TJ302
A
10.3969/j.issn.1673-3193.2016.05.011
猜你喜欢
钻采工艺(2022年4期)2022-10-21
煤气与热力(2021年7期)2021-08-23
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年6期)2021-07-28
汽车实用技术(2021年8期)2021-05-17
饮食保健(2020年7期)2020-04-30
汽车零部件(2019年5期)2019-06-13
船海工程(2018年5期)2018-11-01
北京航空航天大学学报(2018年1期)2018-04-20
家庭科学·新健康(2014年10期)2014-10-24
