
超磁致伸缩谐波电机的微位移放大器研究
2016-12-20 04:12朱优兵朱林剑苑顺鹏曹向峥
微特电机 2016年10期
朱优兵,朱林剑,苑顺鹏,曹向峥
(大连理工大学,大连 116024)
超磁致伸缩谐波电机的微位移放大器研究
朱优兵,朱林剑,苑顺鹏,曹向峥
(大连理工大学,大连 116024)
设计了一种基于帕斯卡原理的液压微位移放大装置,用于超磁致伸缩谐波电机中致动器的微位移放大。对放大器的原理、结构形式及输出特性进行了研究,同时分析了影响实际放大倍率的结构参数、系统因素并提出了改进措施。此液压微位移放大装置是用于超磁致伸缩谐波电机中的理想微位移放大装置,具有结构构紧凑、承载力大、放大倍数高等优点。
超磁致伸缩; 谐波电机; 微位移放大器; 放大器特性分析
0 引 言
谐波齿轮传动是一种靠中间柔性构件弹性变形来实现运动和传递动力的装置,由刚性齿轮、柔性齿轮和波发生器构成。不同形式的波发生器构成了不同形式的谐波齿轮传动。主要类型有:电磁驱动的谐波齿轮传动[1]、静电驱动的谐波齿轮传动[2]、压电驱动的谐波齿轮传动[3]、液压驱动的谐波齿轮传动[4]等。
本文研究的超磁致伸缩谐波电机是利用超磁致伸缩材料的伸缩特性代替传统波发生器而形成的新形式电机。超磁致伸缩材料是一种能将磁-机-电能相互转换的新型功能材料,超磁致伸缩材料的微位移致动器具有大位移、强力、响应快、可靠性高、驱动电压低等优点。超磁致伸缩谐波齿轮传动组成结构示意图如图1所示,图1中的4个驱动器按一定规律分布控制8个均匀分布的输出顶杆,通过控制超磁致伸缩材料棒的伸缩变形来驱动柔轮按要求规律径向变形,当固定刚轮时,通过刚轮和柔轮的啮合作用,便会使柔轮产生低速旋转[5];输出顶杆的变化规律如图2所示;单个驱动器试验结构如图3所示。

图1 超磁致伸缩谐波齿轮传动组成结构示意图

图2 输出顶杆的位移变化图

图3 单个驱动器试验结构图
超磁致伸缩谐波电机主要由致动器和位移放大器组成,驱动器的特性主要取决于超磁致伸缩棒的磁致伸缩特性,位移放大器要具有较大的放大倍数,一定的承载能力及较快的响应速度。目前可实现微位移放大的机构主要有变幅杆放大、U形放大装置、拉弯柔性铰链[6]、新型菱形放大机构[7]、三角形机构、杠杆放大机构,主要用于精密定位,微位移工作台及微位移驱动器的场合等。以上机构由于输出放大倍数不高,效率低,承载能力弱,无法满足谐波电机中位移放大的要求,故谐波电机采用液压微位移放大器,相比于其它类型的位移放大器具有结构紧凑、承载力大、放大倍数高、响应快、效率高、噪音低等优点。
1 谐波电机液压微位移放大装置
1.1 微位移放大原理
液压微位移放大装置应用帕斯卡原理:不可压缩静止流体中任一点受外力产生压力增值后,此压力增值瞬时间传至静止流体各点,即密闭的静止液体各处的压强是相等的。液压微位移放大装置原理图如图4所示。

图4 液压微位移放大装置原理图
该装置由大、小两个活塞和一个密闭的容腔组成,大活塞端施加力F,产生位移x1,密闭容腔内的液体压缩推动小活塞向右移动产生位移x2,忽略密闭容腔的泄露和油液的压缩,可以认为变化前后容腔容积大小没有变化故A1x1=A2x2,放大倍数:
此外,油液各处压强相等,故:
在实际应用时,由于液压油的可压缩性和油液中的含气量,放大倍数K比理论值小,且输出力F2变小,为了综合考虑放大倍数与带载能力的要求,必须选择合适的放大倍数,使其同时具有一定的带载能力。同时了解到,要使其实际放大倍数更接近于理论值,应该使容腔保持完整的密闭性和液体的体积尽可能的少,以减小液体压缩性的影响。故此液压放大装置在注入液压油时必须进行抽真空处理,必须保证装置的密闭性,排尽装置中残留的空气和油液中溶解的气体,使液压油充满密闭装置。
1.2 液压放大器结构形式设计
基于上述原理可知,微位移液压放大器的结构形式取决于放大器输入输出端采用何种具体结构和密封方式,因此用于超磁致伸缩谐波齿轮传动的液压微位移放大结构的结构形式有弹性密封式和刚性密封式,弹性密封方式采用O型圈或格莱圈密封,密封效果太差,且容易出现爬行现象,动态响应能力差,故不适用于此种放大器。选择刚性密封,即可以选择金属膜片或金属波纹管。
液压放大装置的输入、输出端的结构选择如表1所示。

表1 液压微位移放大装置4种形式的比较
根据上表可知,输入端选用金属膜片,输出端选用金属波纹管。放大器结构图(不含注油装置)如图5所示。

图5 放大器结构图
2 金属膜片、波纹管参数设计
2.1 金属膜片变形理论分析
选用倒圆角型柔性铰链膜片,三维结构及示意图如图6所示。
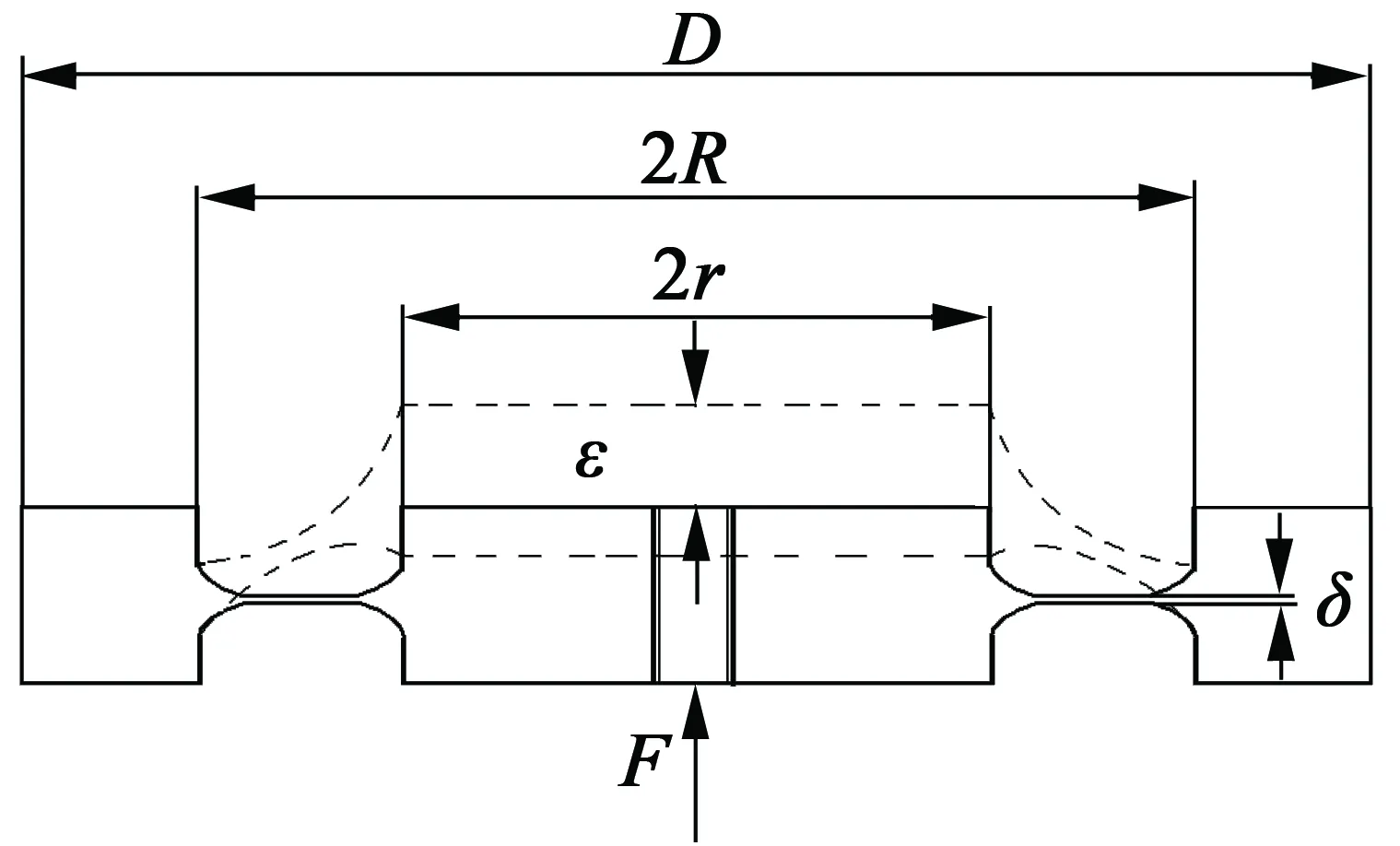
图6 膜片主要参数示意图
此平膜片的受力变形较复杂,用于分析的主要理论有经典弹性薄板理论,卡尔曼大挠度理论和薄膜理论。在挠度较小时,膜片主要靠剪切内力平衡外载;挠度较大时,膜片的剪切内力减小,主要靠膜片的张力平衡外载[8]。
由弹性力学圆形薄板的小挠度轴对称弯曲理论,可得出其任意一点在极坐标下挠度的表达式[9],当F一定时,可求出膜片的最大位移量ε:
(1)
式中:E为膜片的弹性模量;μ为泊松比。
由于R受到总体尺寸的限制,所以R是固定的,r尽可能地选大,但过大会使膜片刚度太大,膜片变形困难,所以要选择合适的r和δ,使膜片有较好刚度,利于膜片的变形,同时又满足剪切强度的要求。
2.2 膜片选用合理参数的理论分析与ANSYS分析
使用图6所示膜片结构,为使在ε一定时排开的油液最大,即使r最大,使过渡圆环的外端与油腔内壁对齐。
由于总体尺寸的限制,初步选定膜片的尺寸为D=51mm, R=21mm, r=17mm, δ=0.16mm超磁致伸缩材料(GMM)棒在准静态负载下,可简化成一定刚度的弹性体,致动器的输出力与输出位移之间的关系式[10]:
(2)
式中:EH为弹性模量(磁场强度为常数时);SGMM为GMM棒的横截面积;λS为GMM棒的饱和磁致伸缩系数;LGMM为GMM棒的长度。取EH=43 GP(磁场强度为100 A/m时), GMM棒的尺寸Φ14 mm×45 mm,λS=1 320×10-6。
超磁致伸缩谐波齿轮传动中,本实验的GMM在尺寸、预紧力、线圈匝数等一定的情况下,不同直流电的输出位移如图7所示。
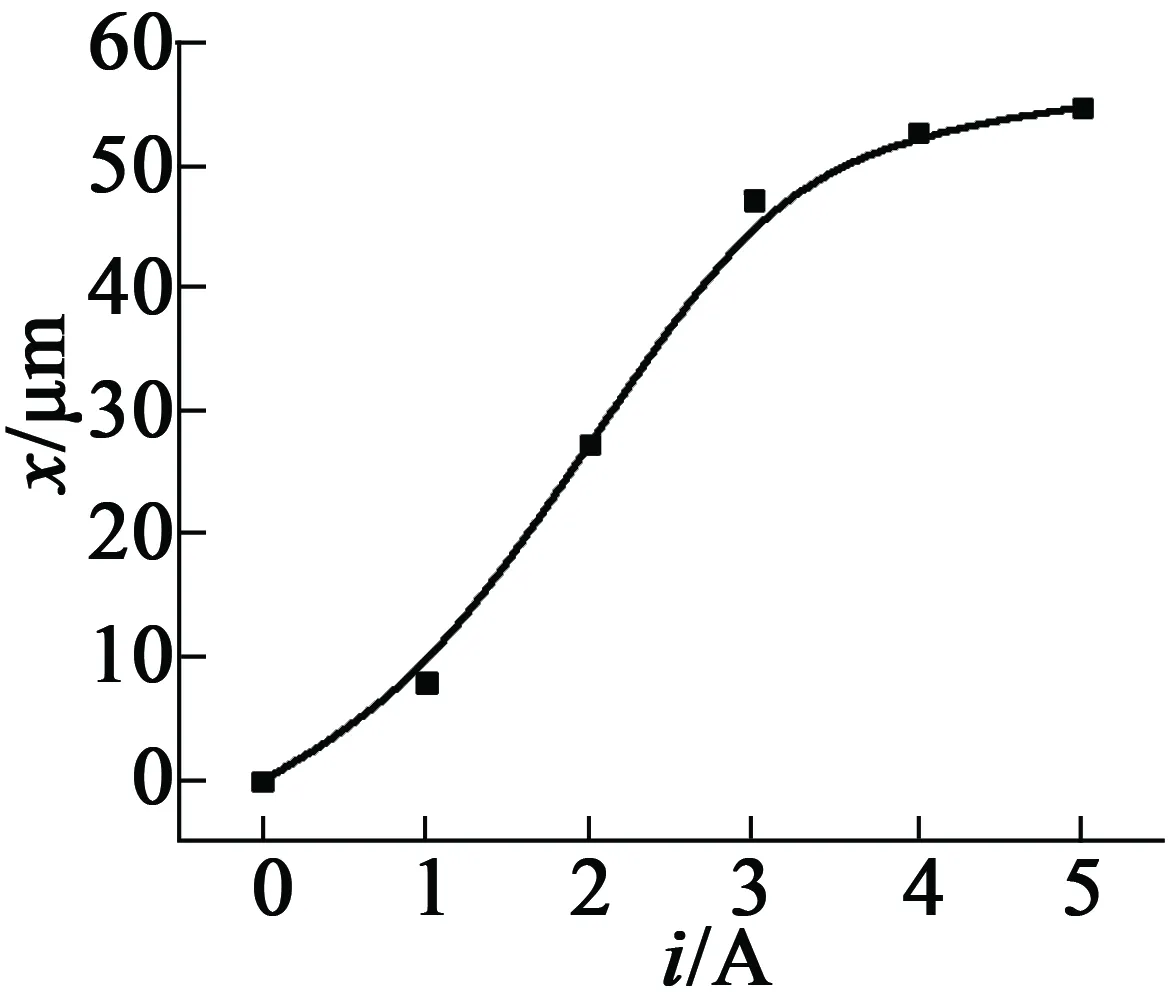
图7 不同直流电下GMM棒的磁致伸缩曲线
由图7可知,GMM线圈通5 A直流电,实验测出的数据x=58.69 μm时,代入式(2)得出F=246.176 N。在将F代入式(1)中,且E=2.1×1011N/m2,μ=0.3,R=21 mm,r=17 mm。得出膜片独立分析时ε的表达式:
当δ取0.16mm时,ε=73.56μm。将上述尺寸的膜片单独进行有限元分析得出膜片刚性中心的位移量如下图8所示。

图8 上述尺寸下膜片的位移云图
在金属膜片的刚性中心施加轴向载荷F=246.176N时,由ANSYS分析得出的最大位移为74.807μm,与用式(1)算出的理论值73.56μm相近。在过渡圆弧宽度一定的情况下,不同的圆弧厚度的最大位移量如图9所示。
由图9可知:理论曲线与ANSYS分析曲线相近;在δ为一定值时,不同圆弧宽度下的最大位移量如图10所示,虽然膜片厚度δ越小、圆弧宽度越大时,最大位移越大,但δ越小,圆弧宽度越大即r越小时,膜片的剪切应力越大,使膜片产生破坏,综合考虑影响取中间合适的膜片厚度和圆弧宽度,实验所取膜片为δ=0.16mm, 圆弧宽度为4mm。

图9 ANSYS分析值与理论值的比较曲线图

图10 不同圆弧宽度下的最大位移量图
2.3 微位移放大器的理论放大倍数分析
以上放大倍数的推导误差较大,必须寻找较准确的推导公式。由波纹管刚度式[11]:
式中:F2为波纹管受到的力;x2为波纹管的伸长量;Dm为波纹管的平均直径;E2为波纹管的弹性模量;δm为波纹管的壁厚;h为波纹管的波高;Cf为刚度系数,与q, h, Dm, δm的取值有关,如图11所示。

图11 系数Cf曲线图
又已知膜片的刚度公式:
式中:F1为膜片受到的外载荷;x1为膜片刚性中心的位移;其他参数如前所注释。由以上两式可得:

将k1, k2的表达式代入上式可得:
将参数代入计算可得理论放大倍数K=9.72。
3 驱动器静态位移输出特性分析
搭建实验平台进行数据测量,实验平台主要包括驱动电源、检测器件、数据采集卡、终端PC、安装底座、超磁致伸缩致动器和超磁致伸缩谐波电机驱动器装置,实验平台连接流程图,实物图如图12、图13所示。

图12 实验平台连接流程图

图13 实验平台实物图
3.1 静态位移输出特性分析
在上述驱动器实验平台上,对驱动器驱动线圈通0~5A直流电,用电涡流位移传感器检测放大器输出端金属波纹管的输出位移,整理实验数据得到超磁致伸缩谐波电机驱动器空载时在不同电流下的位移输出特性曲线如图14所示,不同电流下此GMM棒的位移输出特性曲线如图7所示。

图14 不同电流下的位移输出特性曲线
从图14中可以看出:致动器在空载情况下的理论输出位移比实际输出位移大,静态空载下,驱动器微位移液压放大器的理论放大倍数为9.72,而实验测试放大器的放大倍数为8.85,主要原因为液压油的可压缩性,油腔中的空气含量,此两者的值越小,λ越小,理论公式算出的放大倍数K越大;当λ的取值和实验时的状况越接近时,理论放大倍数和实验测得的放大倍数越接近。
3.2 动态位移输出特性分析
在实验平台上空载条件下对驱动器驱动线圈通频率50Hz、幅值5A的交流电,用电涡流位移传感器检测放大器输出端金属波纹管的输出位移,整理实验数据得到驱动器空载时的动态位移输出特性曲线如图15所示。

图15 空载时驱动器动态位移输出特性
将致动器输出顶杆的位移数据采用MATLAB的曲线拟合工具箱CFTOOL拟合,函数拟合类型设为三角函数型,得到拟合函数表达式:
x1(t)=27.98sin (0.003 604t+1.449)+
28.02sin (0.628 1t-1.665)
曲线图如图16所示。

图16 致动器实验数据与拟合曲线
由图15、图16可知,波纹管的最大输出位移为489μm,致动器的顶杆的最大位移为56μm,对应微位移放大器的实际放大倍数为8.73,理论放大倍数与通直流电时相接近。
微位移液压放大器静态和动态工作时,其实际放大倍数均与理论放大倍数存在一定差距,产生这种误差的主要原因是理论放大倍数是在理想条件下推算的,而实际工作中存在各种干扰因素,比如零件的加工装配误差会使各部件在传递动力的过程中产生摩擦和磨损、检测装置的测量误差等等。同时,放大器油液中含有的气体也是影响放大倍数的一个重要因素。
4 结 语
本文验证了超磁致伸缩谐波电机液压微位移放大器的可行性,在此理论基础上可改变相关的尺寸,如GMM棒的长度、横截面积、膜片的尺寸D, r, δ以及波纹管的波数等,可增大放大倍数,为超磁致伸缩谐波电机的整机设计和特性分析打下坚实的理论基础。小结如下:
(1)设计了一种用于超磁致伸缩谐波电机中基于液压原理的微位移放大装置,对柔性铰链膜片刚性中心的最大位移量进行理论推导和ANSYS分析,并在此基础上进行优化分析。
(2)推导出此液压微位移放大器的理论放大倍数K的关系公式,并通过实验验证了该公式的合理性。通过分析,得出影响两者之间的主要因素为油腔的密封性、油腔的含气量和油液的可压缩性,据此公式改变膜片或金属波纹管结构尺寸可匹配不同的放大倍数。
(3)测试了致动器和驱动器的静态和动态位移输出特性,从结果可知,其静态和动态特性良好,满足工作要求。
[1] 尚振国,尤竹平.电磁式谐波齿轮传动控制系统[J].制造技术与机床,1997(3):7-10.
[2] QIN L, XU L.Coupled dynamics for micro electromechanical integrated electrostatic harmonic drive[C]//The 3rd IEEE Conference on Industrial Electronics and Applications,Singapore.2008:1949-1952.
[3] 辛洪兵,郑伟智.压电谐波电机的研究[J].压电与声光,2004(2):122-125.
[4] 宋志刚,钟健,朱梅.谐波齿轮传动中流体波发生器的设计与研究[J].液压与气动,2008(1):6-8.
[5] 朱林剑,高文泉,包海涛,等.基于超磁致伸缩材料的谐波传动研究[J].磁性材料及器件,2009(6):35-37.
[6] 马亚坤.基于拉弯柔性铰链的二级微位移放大机构[D]西安:西安电子科技大学,2014:7-13.
[7] 方小东.基于新型菱形放大机构的微位移工作台结构研究[D].大连:大连理工大学,2011:35-40.
[8] 张化岚,孙宝元.环状平膜片挠曲变形数学模型及其试验验证[J].大连理工大学学报,2005,45(3):366-369.
[9] 贾振元,杨兴,郭东明,等.超磁致伸缩材料微位移执行器的设计理论及方法[J].机械工程学报,2001,37(11):46-49.
[10] 唐志峰.超磁致伸缩执行器的基础理论与实验研究[D].杭州:浙江大学,2005:28-29.
[11] 汪扬.多层波纹管膨胀节的强度、刚度与屈曲分析研究[D].南京:南京航空航天大学,2005:44-46.
A Research of Micro Displacement Amplifier on the Giant Magnetostrictive Harmonic Motor
ZHU You-bing,ZHU Lin-jian,YUAN Shun-peng,CAO Xiang-zheng
(Dalian University of Technology,Dalian 116024,China)
This paper designed a hydraulic micro displacement amplification device based on the Pascal law, used for the micro displacement magnification of actuators in the giant magnetostrictive harmonic motor. The principle, structure and output characteristics of the amplifier were studied, at the same time, the structure parameters and the system factor were analyzed, which is impact the actual magnification and put forward improvement measures. The hydraulic micro displacement amplification device is ideal for use in the giant magnetostrictive harmonic motor micro displacement amplification device, with compact structure, large bearing capacity and high amplification, etc.
giant magnetostrictive; harmonic motor; micro displacement amplifier; amplifier characteristics analysis
2015-12-29
国家自然科学基金项目(51275069)
TM359.9
A
1004-7018(2016)10-0013-05
猜你喜欢
煤气与热力(2021年10期)2021-12-02
口腔医学(2021年10期)2021-12-02
化肥设计(2019年4期)2019-08-30
橡塑技术与装备(2018年14期)2018-07-20
航天制造技术(2018年3期)2018-07-07
核科学与工程(2017年4期)2017-09-14
化工装备技术(2016年5期)2016-11-15
电测与仪表(2016年24期)2016-04-12
中国房地产业(2016年2期)2016-03-01
中国光学(2015年5期)2015-12-09
