基于跟踪微分器的高超声速飞行器反演控制
2016-12-19 00:47王学厚万铭娟卜祥伟
弹箭与制导学报 2016年4期
王学厚,万铭娟,卜祥伟,韦 刚
(1 江西洪都航空工业集团有限责任公司,南昌 330033;2 空军工程大学防空反导学院,西安 710051)
基于跟踪微分器的高超声速飞行器反演控制
王学厚1,万铭娟1,卜祥伟2,韦 刚2
(1 江西洪都航空工业集团有限责任公司,南昌 330033;2 空军工程大学防空反导学院,西安 710051)
针对高超声速飞行器不确定模型,设计了一种基于跟踪微分器的反演控制器。引入跟踪微分器,在存在量测噪声的情况下,对弹道角和攻角进行有效重构。分别设计了基于动态逆的速度控制器和基于反演的高度控制器,并利用跟踪微分器解决了“项数膨胀”问题。为了保证控制器对模型参数摄动的强鲁棒性,设计了一种新型干扰观测器。仿真结果表明,所设计控制器鲁棒性强,并可提供良好的跟踪效果。
高超声速飞行器;反演控制;跟踪微分器;重构;干扰观测器
0 引言
高超声速飞行器(hypersonic vehicle,HV)的动力性模型具有强非线性、快时变、强耦合、高不确定性和非最小相位行为,并且在实际飞行过程中弹道角和攻角都不易测量,这给控制器的设计带来了很大的挑战[1-3]。
针对HV的飞行控制问题,文献[4-5]采用神经网络自适应逼近HV模型的未知动态,保证了控制器的强鲁棒性,但是,神经网络权值矩阵需要在线调节,导致算法的实时性不好。在文献[6]的基础上,文献[7]设计了一种新型干扰观测器,不仅在存在参数摄动时仍能取得满意的控制效果,且控制算法具有较好的实时性。考虑部分状态不可测问题,文献[8-9]利用高阶滑模微分器实现了对弹道角和攻角的高精度重构,但是,没有考虑模型不确定性和量测噪声的影响,算法的工程实用性较差。
文中将研究存在量测噪声时不可测状态的重构和HV的鲁棒反演控制问题。采用重构后的状态设计反馈控制器,以保证控制器的工程实用性。基于一种改进跟踪微分器设计一种新型干扰观测器,可以实现对不确定参数的平滑估计,确保了控制器的鲁棒性。最后,通过实例仿真来验证重构策略和控制算法的有效性。
1 HV模型及问题分析
HV的纵向运动学方程可以描述为[10]:
(1)

控制任务是通过调节u实现V和h对参考输入yref=[Vref,href]T的有效跟踪。将模型(1)中的气动力(矩)、推力和广义弹性力拟合成如下形式:
(2)
(3)

(4)
2 控制器设计
2.1 状态重构
采用文献[11]的反正切跟踪微分器(arctangenttrackingdifferentiator,ATD)进行状态重构,其基本过程如图1所示。
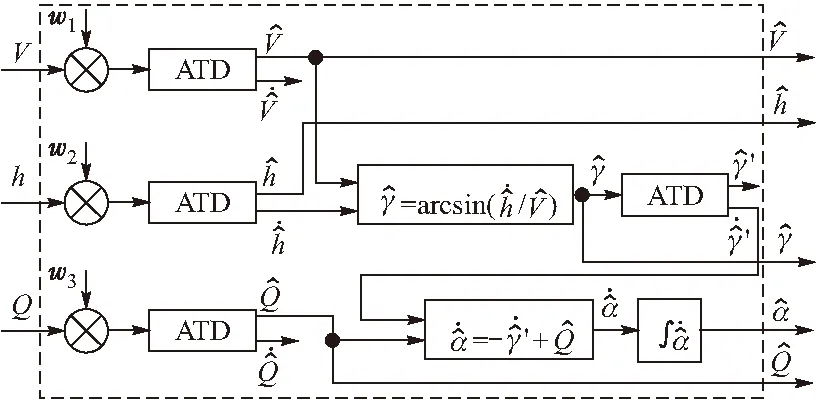
图1 状态重构基本过程
图1中w1、w2和w3表示量测噪声。由于速度、高度和俯仰角速度受到量测噪声污染,首先引入ATD对其进行滤波重构,然后再基于滤波后的速度、高度和俯仰角速度对弹道角和攻角进行重构。
首先,利用模型(1)中第二式子系统对γ进行重构。
(5)

(6)

然后,利用模型(1)中的第四式子系统对α进行重构。
(7)

(8)

(9)
式(6)和式(8)中ATD设计参数Ri、ai1、li1、ai2、li2(i=1,2,3,4)的整定规则可以参考文献[11]。
2.2 控制器设计
将速度、高度、弹道角、攻角和俯仰角速度跟踪误差分别定义为:
(10)
对式(10)求一阶导数,并利用式(9)可得:
(11)
(12)

(13)
(14)
(15)

2.3 干扰观测器设计
利用文献[12]提出的改进跟踪微分器设计一种新型干扰观测器(disturbanceobserver,DO)。
考虑如下不确定系统:
(16)
式中:x0和u0分别为系统状态和控制输入;d表示不确定项;f(x0)和g(x0)为已知连续函数。
将新型DO设计为如下形式:
(17)

引理1[12]如果R>0,a1>0,a2>0,β≥1,p>q>0且p和q均为奇数,则对任意有界可积输入信号υ和T>0,可得:
(18)

(19)

利用DO(17)对模型(9)中的不确定项进行估计。
(20)
(21)
(22)
(23)
2.4 稳定性分析
定义如下误差:
(24)
(26)
选取如下Lyapunov函数:
W=WV+Wh+Wγ+Wα+WQ
(27)
式中:
(28)
(29)

又因为:






则式(27)变为:
(30)
式中:

由Λ的表达式可知Λ是有界且收敛的。若取:

则式(30)变为:

(31)
W(t)≤Λ/(2W)+[W(0)-Λ/(2W)]e-2rt
(32)
3 实例仿真
采用Matlab软件对所设计的控制器进行仿真验证。考虑一种恒动压飞行状态,q保持90 148Pa恒定,速度和高度分别阶跃351.6m/s和1 828.8m。设计参数选为:kV,1=1.5,kV,2=0.8,kh,1=1.2,kh,2=1,kγ,1=1,kγ,2=0.3,kα,1=1,kα,2=0.1,kQ,1=1,kQ,2=0.5,R1=R2=R3=R4=10,R5=5,R6=12,R7=14,a11=a21=a31=16,a41=10,a51=a61=a71=2,li1=li2=3(i=1~7),ai2=2(i=1~7),p=9,q=3,RV=10,Rγ=Rα=0.1,RQ=0.5,βi=2(i=V,γ,α,Q),aV1=2,aγ1=aα1=0.1,aQ1=0.5,aV2=2,ai2=4(i=γ,α,Q)。ΔV和ΔQ分别取为0.46sin(0.01πt)m/s,1.72×sin(0.01πt) (°)/s。考虑量测噪声w1、w2、w3均为方差为0.01的随机噪声,仿真结果如图2所示。
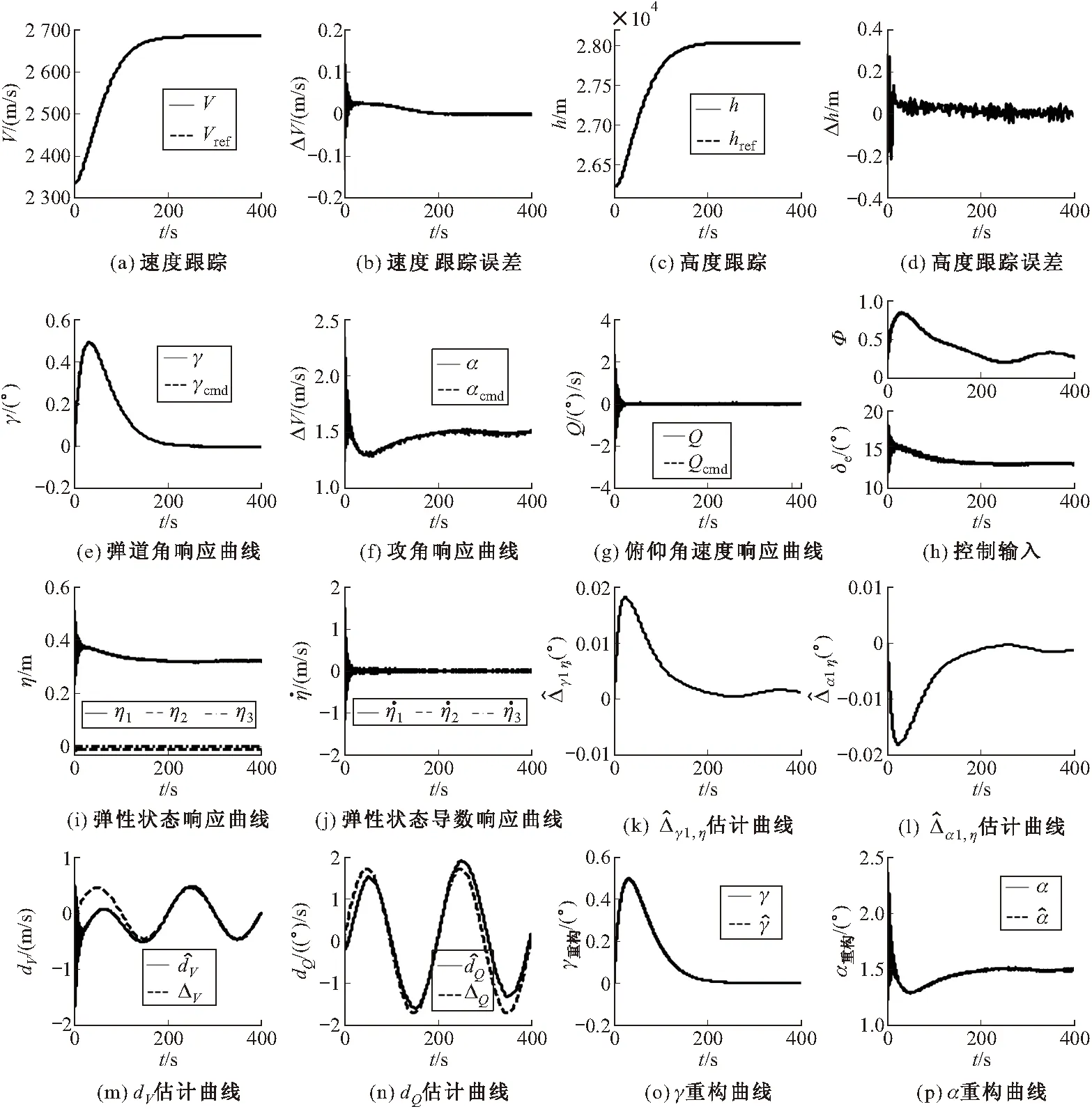
图2 考虑量测噪声时仿真结果
图2给出了考虑量测噪声时的仿真结果,可知当速度V、高度h和俯仰角速度Q的量测值含有噪声时,文中提出的状态重构策略依然可以实现对弹道角γ和攻角α的有效重构(见图2(o)、图2(p))。从而保证了基于重构状态设计的控制律在存在参数摄动情况下,仍能实现速度V和高度h对参考输入Vref和href的有效跟踪, 且速度和高度跟踪误差始终维持在很小的范围内(见图2(a)~图2(d))。图2(e)~图2(h)表明在整个跟踪过程中,弹道角γ、攻角α、俯仰角度速度Q和控制输入Φ、δe始终都维持在合理的范围内,且γ、α和Q能够实现对期望值γcmd、αcmd和Qcmd的有效跟踪。图2(k)~图2(n)给出了文中所设计DO对模型扰动的估计效果,充分表明了文中DO的有效性,因而可以保证控制律对模型不确定项的鲁棒性。另外,图2(i)~图2(j)表明,弹性状态也获得了较好抑制,前三阶弹性状态及其一阶导数都是最终收敛的。
4 结论
文中研究了HV的反演控制律设计问题。面向工程实际,仅在V、h和Q可测且含有量测噪声的情况下,采用具有滤波能力的ATD对γ和α进行有效重构,保证了基于重构状态设计的控制器的良好控制效果。采用ATD解决了传统反演控制方法中“微分项膨胀”问题。设计了一种新型DO,解决了单纯反演控制鲁棒性不理想的问题。仿真结果充分证明了文中所提方法的可行性和有效性。
[1] 齐乃明, 宋志国, 秦昌茂. 高超声速飞行器自抗扰PID姿态控制 [J]. 弹箭与制导学报, 2010, 30(5): 66-68.
[2] 宋超, 赵国荣, 李海君. 临近空间高超声速飞行器自适应反演滑模控制 [J]. 弹箭与制导学报, 2012, 32(3): 49-52.
[3] CHAVEZ F R, SCHMIDT D K. Analytical aeropropulsive/aeroelastic hypersonic-vehicle model with dynamic analysis [J]. Journal of Guidance, Control, and Dynamics, 1994, 17(6): 1308-1319.
[4] BU X W, WU X Y, MA Z, et al. Nonsingular direct neural control of air-breathing hypersonic vehicle via back-stepping [J]. Neurocomputing, 2015, 153: 164-173.
[5] BU X W, WU X Y, MA Z, et al. Novel adaptive neural control of flexible air-breathing hypersonic vehicles based on sliding mode differentiator [J]. Chinese Journal of Aeronautics, 2015, 28(4): 1209-1216.
[6] BU X W, WU X Y, CHEN Y X, et al. Design of a class of new nonlinear disturbance observers based on tracking differentiators for uncertain dynamic systems [J]. International Journal of Control, Automation, and Systems, 2015, 13(3): 595-602.
[7] BU X W, WU X Y, ZHANG R, et al. Tracking differentiator design for the robust backstepping control of a flexible air-breathing hypersonic vehicle [J]. Journal of the Franklin Institute, 2015, 352(4): 1739-1765.
[8] WANG J, ZONG Q, TIAN B L, et al. Flight control for a flexible air-breathing hypersonic vehicle based on quasi-continuous high-order sliding mode [J]. Journal of Systems Engineering and Electronics, 2013, 24(2): 288-295.
[9] ZONG Q, WANG J, TIAN B L, et al. Quasi-continuous high-order sliding mode controller and observer design for flexible hypersonic vehicle [J]. Aerospace Science and Technology, 2013, 27: 127-137.
[10] FIORENTINI L. Nonlinear adaptive controller design for air-breathing hypersonic vehicles [D]. Columbus: The Ohio State University, 2010.
[11] 董小萌, 张平. 反正切形式跟踪微分器设计及相平面分析 [J]. 控制理论与应用, 2010, 27(4): 533-537.
[12] 史永丽, 侯朝桢. 改进的非线性跟踪微分器 [J]. 控制与决策, 2008, 23(6): 647-650.
Tracking-differentiator-based Backstepping Control of Hypersonic Vehicles
WANG Xuehou1,WAN Mingjuan1,BU Xiangwei2,WEI Gang2
(1 Jiangxi Hongdu Aviation Industry Group Corporation Limited, Nanchang 330033, China; 2 Air and Missile Defense College, Air Force Engineering University, Xi’an 710051, China)
A backstepping controller was exploited for an uncertain hypersonic vehicle model. A tracking differentiator (TD) was employed to reconstruct states of flight-path angle and angle-of-attack in the presence of measurement noise. Then, a velocity controller was devised based on dynamic inversion and an altitude controller was explored using backstepping. Moreover, the TD was applied to handle the problem of “explosion of terms”. In order to guarantee the controller’s robustness against model parameter perturbation, a new disturbance observer was constructed. Simulation results show that the investigated controller exhibits strong robustness and can provide excellent tracking performance.
hypersonic vehicles; backstepping control; tracking differentiator (TD); reconstruction; disturbance observer
2015-08-01
王学厚(1975-),男,甘肃临洮人,高级工程师,研究方向:科研项目管理工作及控制理论研究。
TP273
A
猜你喜欢
数学物理学报(2022年5期)2022-10-09
黑龙江大学自然科学学报(2022年1期)2022-03-29
科技研究·理论版(2021年22期)2021-04-18
农业机械学报(2020年2期)2020-03-09
宇航总体技术(2019年5期)2019-10-11
火力与指挥控制(2017年11期)2017-12-19
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年10期)2017-04-20
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年16期)2016-06-29