
高光谱-激光共光路联测设计与试验
2016-12-16 11:07付成群方亮谢立军王勇
兵工学报 2016年11期
付成群, 方亮,2, 谢立军, 王勇
(1.解放军理工大学 野战工程学院, 江苏 南京 210007;2.61175部队, 江苏 南京210049)
高光谱-激光共光路联测设计与试验
付成群1, 方亮1,2, 谢立军1, 王勇1
(1.解放军理工大学 野战工程学院, 江苏 南京 210007;2.61175部队, 江苏 南京210049)
为解决同时对空中、地面和水下等目标进行精确的距离、方位和光谱属性探测问题,提出了高光谱- 激光雷达共光路探测原理和计算模型,以及原理样机设计方法,并进行高光谱- 激光雷达共光路探测试验。试验生成了高光谱与激光雷达合成数据,每个点具有坐标信息和光谱信息,对合成前后数据进行对比,可以实现对不同目标识别伪装,并对目标进行精确定位。试验结果表明,高光谱- 激光雷达共光路联测方法具有可行性。
兵器科学与技术; 高光谱成像; 激光扫描数据; 同步联测; 设计与试验
0 引言
在揭露伪装目标与精细目标识别方面,急需能够快速同步获取该目标的空间位置信息和光谱属性特征信息。然而,常规的航空摄影系统、卫星遥感系统以及高光谱成像和微波系统等传统的对地探测手段都存在一个共同的局限——难以同时对空中、地面和水下等目标进行精确的距离、方位和光谱属性探测。
高光谱对于伪装目标识别具有优势,但缺乏精确的三维坐标数据,识别精细目标受限制[1];激光扫描技术可快速获取高精度战场环境数据[2],但缺乏光谱特征数据,揭露伪装能力弱,将二者结合可以实现空间目标的精确定位和属性识别。
目前国外有能同时探测采集光谱数据和空间坐标数据的机载系统,如瑞典AHAB公司的鹰眼、龙眼、蝙蝠系列产品及奥地利Riegl公司的CP-680-EAGLE系统等,这些系统集成了差分定位、惯性测量、数字相机、激光扫描仪和高光谱成像仪[3-5],但是该系统的各个模块相互独立,光谱数据、空间坐标数据和影像数据之间的匹配是通过一系列后处理步骤完成的。试验表明:积木搭建式综合集成的激光与高光谱成像系统体积大,对搭载平台要求高,最关键的制约问题是激光与光谱数据在匹配精度方面难以提升。
鉴于以上分析,要实现高光谱数据、激光扫描空间坐标数据同步一体化采集,且实现设备小型化,就必须将两种数据采集光路进行综合,即共光路设计,从仪器内部实现数据的同步一体化,以提高数据的匹配精度。发展高光谱- 激光雷达复合联测技术,为战场侦察提供一种新的技术手段。
1 共光路联测原理与计算模型
1.1 高光谱- 激光雷达共光路联测原理
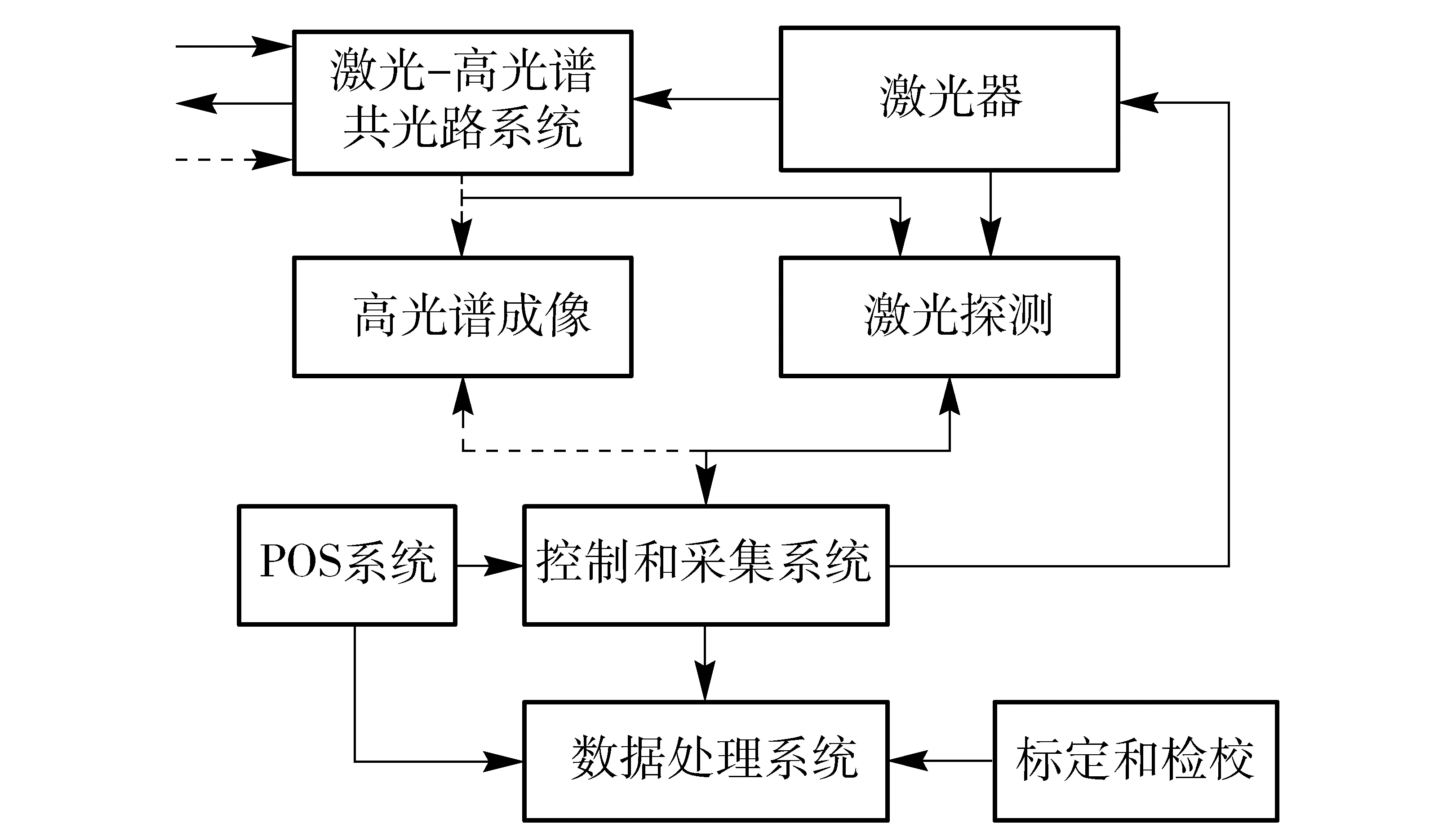
高光谱- 激光雷达共光路成像是将激光扫描成像与高光谱成像进行高度集成[6],其基本原理是使激光发射和接收部分与高光谱成像部分共用光学主透镜,将线扫描高光谱成像和激光点扫描成像光路一体化,从光学结构上实现高光谱- 激光雷达成像视场和像元匹配,如图1所示。
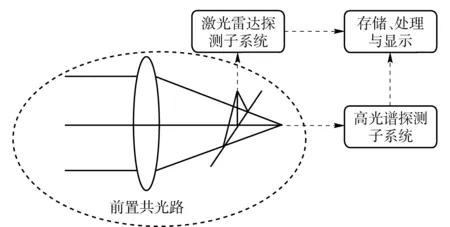
图1 高光谱- 激光雷达共光路成像原理图Fig.1 Imaging principle of hyperspectral lidar with common optical path
1.2 高光谱- 激光雷达共光路计算模型
1.2.1 高重频伪随机码激光脉冲位置调制计算
在激光探测中,将激光脉冲之间的间隔时间进行伪随机码调制,接收的回波同样具有伪随机编码特点,可以通过编码的相关性,准确解算出与发射脉冲相关的回波脉冲,克服超过模糊距离的激光测距错误问题。采用伪随机码激光脉冲位置调制和连续高速采样技术,克服高重频激光发射带来的距离模糊。
在高重频激光发射与接收条件下,传统的规则周期脉冲由于传输距离较近,脉冲发射与接收之间的时间间隔往往小于激光脉冲发射时间间隔[7],因此,当探测系统接收到激光脉冲时,无法确定是哪次发射脉冲所产生的反射信号,即会产生模糊距离。
最大模糊距离计算公式为

(1)
式中:c为激光光速;PRR为激光发射频率。
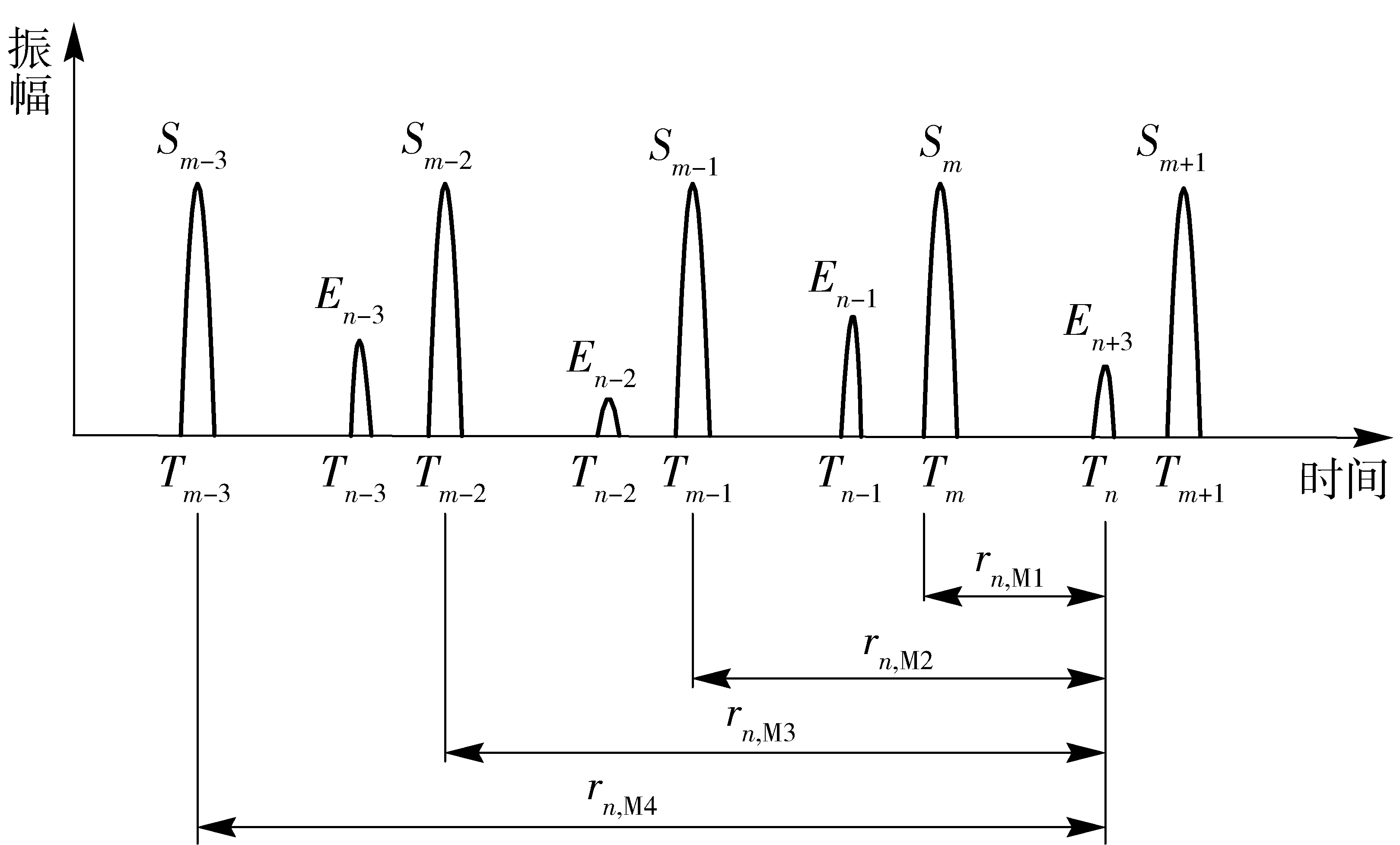
如图2所示,Tn时刻脉冲为En,其前序发射脉冲为Sm,时刻为Tm,以此类推。脉冲飞行时间为
(2)
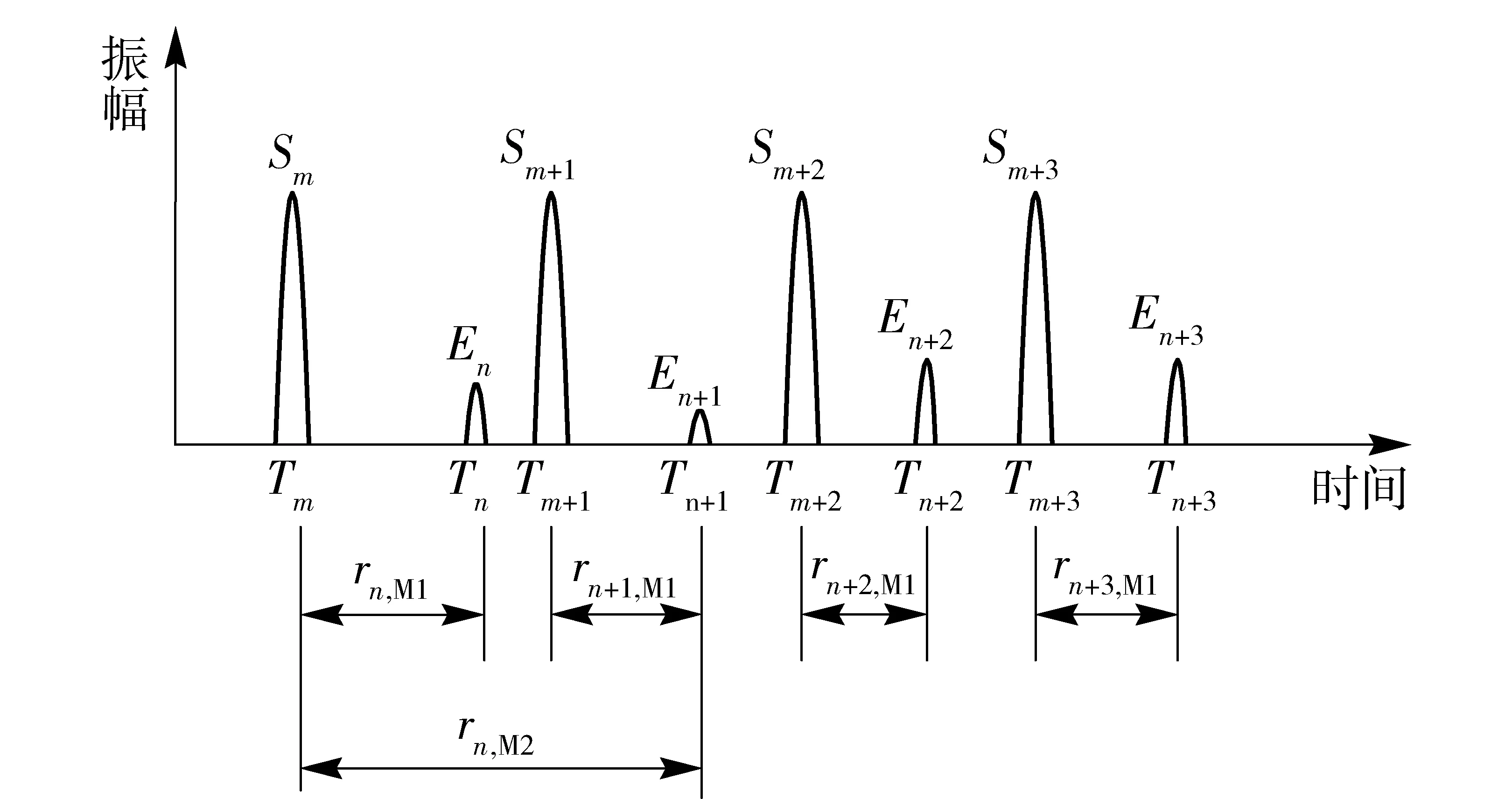
图2 规则周期脉冲与模糊距离Fig.2 Regular periodic pulse and fuzzy distance
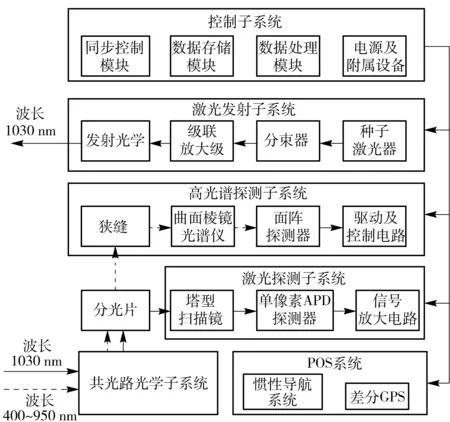
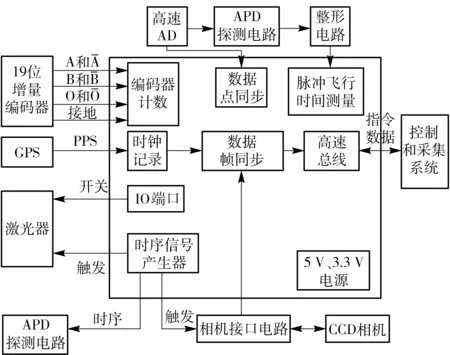
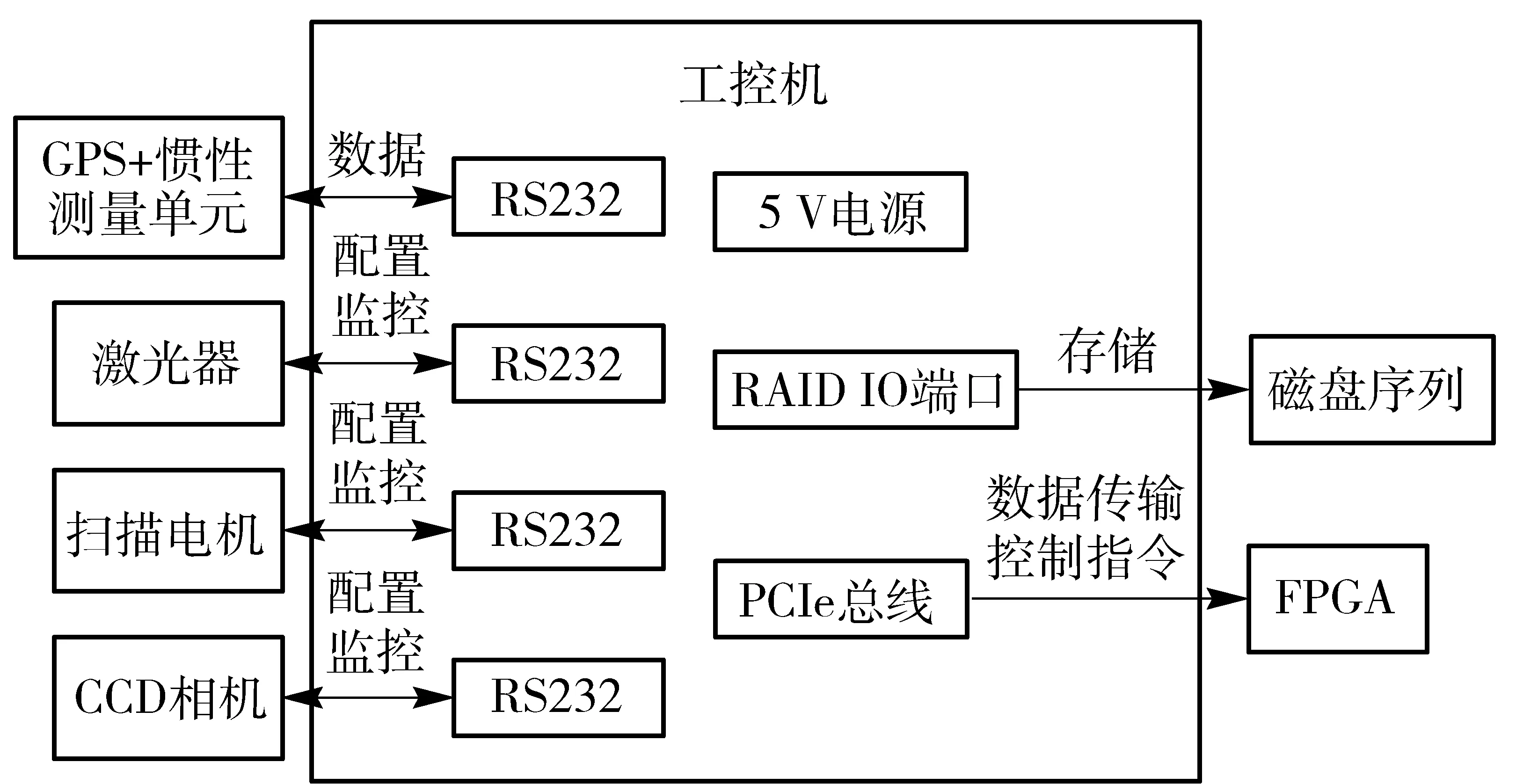
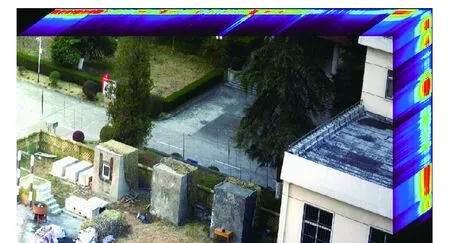
当对应的目标位于0 (3) 当对应的目标位于Ru (4) 当对应的目标位于2Ru (5) 由于最大模糊距离计算无法判断反射目标的具体距离,因此,无法获得准确的坐标数据。 采用脉冲调制技术,将激光脉冲之间的间隔时间进行伪随机码调制,如图3所示,Sm为发射脉冲,En为接收脉冲,将发射时间Tm之间的间隔根据脉冲调制规则进行调整,因此,接收脉冲En的发射脉冲可能位于第2模糊区,其距离为rt. 图3 激光脉冲伪随机码调制示意图Fig.3 Modulation of laser pulse pseudo-random code 1.2.2 系统光谱定标及激光测距计算模型 光谱定标是辐射定标的基础,准确的光谱定标是获得地物正确光谱信息的必要条件[8]。光谱定标就是确定成像光谱仪各光谱通道的中心波长和光谱带宽,光谱响应函数可以表示为 (6) 式中:λ为中心波长;λi为相应光谱通道的波长;Δλ为光谱响应函数的半峰值全宽。 光谱定标的任务是确定各通道的光谱中心波长、位置和通过特性(等效通带宽度和通带函数),光谱定标应满足对全系统、全口径、全视场的要求[9],其关键是光源的选择,它应具有稳定性高和寿命长的特点,要求入射多光谱相机的光源单色性好,分布均匀。色散型高光谱相机的光谱定标由单色仪定标系统完成。 1.2.3 像元间响应度的相对定标计算模型 相对定标的目的是修正探测器像元间响应的不一致性和系统光能传输不均匀造成的视场方向输出不均匀性[10]。 干涉成像光谱仪的原理与结构和色散型光谱仪及电荷耦合元件(CCD)相机不同,它在像面上得到的是干涉图,不能简单地进行像面的不均匀性修正,需分步进行修正: 1)修正CCD芯片像元间响应的不均匀性:采用足够远距离的稳定点光源,或者稳定、均匀的轴上平行光做照明光源,以照度均匀的光照亮CCD芯片的受光面,经归一化处理,得到像元间响应不一致的相对响应系数C1(i,j),i、j分别为CCD面阵行、列序数; 2)校正全系统视场方向光能传输引起的不均匀性:对整机全系统输入充满视场的均匀光,对探测器响应的输出数据进行拟和、归一化处理,得到每个像元的相对响应系数C2(i,j). 经过以上修正,即完成了整个像面的相对定标。则有 C(i,j)=C1(i,j)C2(i,j). (7) 整机全系统不均匀性校正采用的光源应为充满视场的均匀平行光,可用天空背景作为无限远的均匀光源,也可用优化设计的平行光管来实现。 1.2.4 光谱辐射度绝对定标计算模型 高光谱相机的光谱辐射度绝对定标是为了确定所有探测单元的光谱响应函数,即复原光谱值与输入光谱辐射亮度值之比,建立复原光谱值与目标光谱辐亮度间的定量关系。辐射定标由积分球辐射系统完成。 已知光谱强度分布B(u)的均匀定标光进入干涉光谱成像仪,得到CCD像面的干涉强度分布(DN值)为 B(v)cos (2πvx)dv+I0(i,j), (8) 式中:x是光程差,x坐标为行方向;v为波数(cm-1);I0(i,j)是像元(i,j)的零输入响应;C(i,j)是相对定标系数;R(i,j,v)是光谱响应函数;K(v)为sinC函数,是由于矩形采样产生的调制函数;v1、v2为起始和终止波数。 提取零光程差列某个像元i的点干涉图(光谱方向的一行干涉强度数据),经过相应像元的零输入响应修正、相对定标的像元响应不均匀性修正(平场)、滤波、相位修正、傅里叶变换后,得到复原光谱,将此复原光谱与输入标准光谱B(v) (辐射亮度值)进行比对,先做光谱相对强度的光谱形状定标(光谱相对定标),得到复原光谱分布B′i(v),再做光谱幅值的绝对定标,确定绝对定标系数Di(v).Di(v)表示像元输出每单位DN值对应的输入光谱辐射亮度值, (9) 在定标中因每像元的I0(i,j)和C(i,j)是与光程差无关的因子,干涉图经过这两项修正后,各行干涉图相同,绝对定标系数可以单值化为D(v). 若干涉成像光谱仪响应的非线性度超过1%,为了提高定标精度,应按8~10个输入亮度级给出绝对定标系数。 1.2.5 距离校正计算模型 测距误差还与反射物体的表面特征有关[11]。为了减少外界因素对测距误差测定的影响,需在整个试验过程中保证激光扫描仪的绝对静止,通过移动标志板来测定距离。 测距误差校正的方法:将标定设备固定在水平台上,用水准管将调平,保持静止,对着贴有不同反射介质的标志板扫描;然后把标志板置于1 m不等的距离处扫描,并用全站仪测定不同距离处标志板与激光扫描参考中心的距离,从不同距离处选择一组标志板上强度值连续的数据,根据强度对应距离的关系拟合二者的曲线函数,建立强度改正查找表;分别对不同距离处的测距值都加以强度改正,求出标志板上的平均测距值,作为激光测距值,对激光测得的距离和全站测得的距离用最小二乘来拟合,求取加乘常数。 LQ=LL+K1+K2LL+L(i), (10) 式中:LQ为全站仪测得的标志板到激光扫描参考中心的距离;LL为激光扫描仪测得的标志板到激光扫描参考中心的距离;K1、K2分别为加、乘常数;L(i)是关于强度的函数,可以从强度改正查找表中查找。 数据处理方法:1) 由激光扫描仪测得的距离和扫描角计算标志板上每个激光点到激光发射参考中心的垂直距离,以消除斜距的影响;2) 统计不同强度对应的激光测距值,拟合二者的曲线,选取一基准强度值,其他强度值处的激光测距值都相对该基准强度值进行改正,例如,强度值为0时的改正数为0,其他强度值处的改正数则可由拟合曲线求出;3) 建立强度改正查找表,消除由于反射强度不同引起的测距误差;4) 计算标志板上所有点到激光扫描参考中心的平均距离作为激光测距值,并与全站仪的测距值对比;5) 根据最小二乘原理求测距的加乘常数。 1.2.6 角度校正计算模型 测角误差校正是利用水准管将转台调平固定,将固定转台对着某个方向扫描,同时每隔一段时间把转台转动一个小角度(约为2°),然后静扫描一段时间(约为20 s),再转动转台,依照同样的方法依次扫描,通过转台转动的角度和激光扫描仪测得标志点的角度对比拟合出它们之间关系。激光扫描仪的测角误差呈线性规律变化: θQ=θL+K1+K2θL, (11) 式中:θQ为转台“测”得的标志点的角度;θL为激光扫描仪测得标志点的角度;K1、K2为角度改正系数。 通过外部已经标校的坐标控制点,获取激光扫描的实际角度和测量角度数据,分析随着扫描夹角的变化,测量角度残差呈固定变换[12]。通过最小二乘法拟合出关系曲线,对测量角度进行矫正[13-14]。 Surgical management is the preferred approach for cardiac liposarcoma, given its metastatic potential and the significant associated cardiorespiratory morbidity. 2.1 系统结构设计 高光谱- 激光雷达共光路系统采用共光路设计方式,系统组成如图4所示。整个系统分为控制字系统、激光发射子系统、激光探测子系统、高光谱探测子系统、共光路光学子系统、定位定姿系统(POS)等分系统组成,完成高光谱- 激光雷达数据的共光路采集和记录。 图4 高光谱- 激光雷达共光路系统组成图Fig.4 Block diagram of common optical path system of hyperspectral lidar 系统的成像幅宽角为11.5°,最大作用距离2 km,成像的帧频达到50 Hz. 其中主动激光成像采用单点一维扫描方式,形成一维的线阵激光,线阵的幅宽角为11.5°,激光点角间距0.4 mrad,单束激光发散角0.2 mrad,测距精度0.1 m. 被动高光谱成像采用面阵CCD探测器和高分辨率光谱仪获取一维高光谱像,高光谱范围400~950 nm,光谱分辨率为4 nm,空间分辨率0.4 m. 系统总体方案如图5所示。 图5 高光谱- 激光雷达共光路系统框图Fig.5 Block diagram of common optical path system of hyperspectral lidar 2.2 高重频扫描激光器设计 成像系统中的主动成像部分采用高重频光纤1 030 nm激光器作为照明光源,该激光器波长范围靠近可见光,与成像光谱的波段接近,采用的接收主透镜波长兼顾性好,能够同时满足高光谱- 激光雷达系统对成像质量的要求。激光器采用全光纤结构,光纤激光器方案如图6所示。激光器系统采用主振荡- 功率放大 (MOPA) 结构放大,由种子激光器和两级放大器组成。 种子激光器采用直接调制的半导体激光器,内置半导体制冷器(TEC)温控电路,其参数为中心波长1 030 nm,经电脉冲直接调制后输出光脉冲峰功约200 mW,脉冲宽度5 ns左右,光谱宽度约1.5 nm,尾纤输出的种子光经隔离器后进入分束器,分出小部分光作监测用,判断种子激光器是否正常工作。分束器之后大部分光进入级联的放大级进行放大。 图6 光纤激光器结构图Fig.6 Schematic diagram of fiber lasers 2.3 共光路光学系统设计 共光路光学系统用于收集来自地面目标的光辐射和激光回波,并通过分色片将高光谱与激光波段信号分离。光学系统中的高光谱- 激光雷达成像系统共用一个前置主透镜,采用光谱分光方式将后端光路分开,分别实现高光谱成像和激光探测。主动激光的发射和接收采用同轴方式,共用一个4面体扫描镜,实现激光线阵成像。高光谱- 激光雷达共光路光学系统方案如图7所示。其中前置镜部分包含光阑和望远物镜两个组件,望远物镜属于短焦距、宽谱段、相对孔径较大的系统,需要校正包括球差、像散、色差等在内的所有7种像差。本方案采用了外置光阑的改进型双高斯结构,是一个全透射式的光学系统。该系统具有如下特点本方案采用了外置光阑的改进型双高斯结构: 1)光阑位于透镜前焦平面上,构成像方远心系统,减少使用场镜与后置光谱仪匹配所带来的一系列问题; 2)将光阑置于前置物镜的前端,易于系统杂光的消除; 3)望远物镜的像面上设置狭缝,而在狭缝和最后一块镜片之间留有较大长度,有利于消除杂光和鬼像。 2.3.1 探测系统设计 探测系统中的主被动成像分别采用单像素雪崩光电二极管(APD)探测器和面阵CCD探测器,主动成像采用APD探测激光的回波,根据飞行时间测量获取目标距离,同步采样扫描镜编码器的角度,实现激光三维原始图像的采集;被动成像采用CCD面阵探测光谱图像,实现高光谱原始图像的采集。根据探测距离、像素分辨率和光谱分辨率要求。探测系统以现场可编程逻辑门阵列(FPGA)为控制核心器件,完成多源数据的同步和传输;以APD和CCD作为探测器,实现高光谱- 激光雷达探测;以内部时序信号产生器产生CCD的曝光触发信号、激光器的出光触发信号和APD探测电路的主波信号,有效从时间上将多元数据进行主动同步,确保高光谱- 激光雷达成像像元的时间匹配。APD的探测信号经过放大和整形后,由FPGA实现时间测量获取距离。探测系统的方案如图8所示。 图8 探测系统功能框图Fig.8 Functional block diagram of detecting system 激光探测部分的光路采用了一个扩束镜+线扫描的结构,通过一个短焦凹透镜与前置物镜构成一个4倍的扩束镜,一方面提高接收口径,一方面压缩扫描角度以提高成像角分辨率。使用带通孔的45°平面反射镜实现激光收发同轴,后端接收透镜直径20 mm,发射激光直径2 mm. 根据成像的角范围,后端扫描镜的扫描角度达到45°,采用4面塔镜作为一维扫描镜,该扫描镜采用玻璃一体加工成型,转轴穿过扫描镜中心,与转轴垂直方向的投影直径为50 mm,沿转轴方向的高度为20 mm,外表面镀1 030 nm波段的介质高反膜。反射面与转轴夹角45度,塔镜360°单方向连续转动,单圈可以获得4条扫描线,有效通光孔径20 mm,单面有效扫描角度达到45°. 2.3.2 控制和采集系统设计 控制和采集系统基于高速的PCIe工业总线实现探测数据的传输,通过磁盘阵列完成高速海量数据的存储,采集和存储的数据包括激光探测数据、CCD光谱图像数据和姿态系统的数据。通过内置串口实现对整个成像系统各个模块的控制和状态采集。控制和采集系统采用4核工控机作为硬件平台,实现对其它系统和控制和监测,同时完成高光谱- 激光雷达图像数据和姿态数据的采集和存储。通过PCIe总线实现探测系统的高速数据传输和控制指令发送,通过串口实现其它模块控制指令的发送、状态参数和测量数据的接收[15]。方案如图9所示。 图9 控制采集系统框图Fig.9 Block diagram of control-acquisition system 系统由综合控制与监测子系统进行统一控制,其中同步控制模块负责控制各子系统的工作时序,在接收到POS系统发出的飞行速度与高度信息后,同步控制模块实时计算合适的基准工作频率,并将分频处理后的触发信号同步发送给激光发射子系统、高光谱成像子系统和POS系统,实现各子系统同步工作,保证数据之间的匹配。 2.3.3 干涉型分光光谱成像 与传统带狭缝的棱镜、光栅等色散型光谱仪相比,干涉型分光光谱成像具有高通量、多通道、高测量精度、杂散光低等突出优点[16]。在高光谱成像部分,采用Offner中继系统结构,Offner中继系统结构紧凑,在远心条件时能自动校正各种3级像差,具有良好的成像特性,且易于加工。通常有两种设计方案:第1种方案是将Offner中继系统中的次镜换成光栅,这种方案结构紧凑能量利用率低,由于有2级光谱的存在,光谱范围受限;第2种方案是在Offner中继系统上下两汇聚光路中分别加入棱镜,这种方案克服了光栅能量利用率低、光谱范围受限的问题,但双离轴曲面棱镜装调困难,稳定性受限。设计了一种Offner曲面棱镜光谱成像系统,如图10所示,即将Offner中继系统中次镜换成单曲面棱镜,这样不但系统结构紧凑,还克服了光栅能量利用率低、光谱范围受限的问题,同时采用轴上单曲面棱镜,克服双离轴棱镜装调困难,稳定性受限的问题。图10中,O为物点,C为轴点,H为物点到轴点的距离。 图10 轴上单曲面棱镜光谱仪Fig.10 On-axis single curved prism spectrograph 3.1 试验参数 测量速度:100 000点/s,测量距离:3~1 000 m,测量精度:8 mm(100 m),扫描视场:360°×310°. 谱段范围:450~1 000 nm,谱段数:180,光谱分辨率(RMS):2.5 nm,像元数:1 000,空间分辨率:0.026 m. 试验场地:扫描目标为对面3个水泥垛口及其周围,如图11所示。 图11 试验场景Fig.11 Test scene 图12 激光点云数据Fig.12 Laser point cloud data 图13 高光谱数据立方体Fig.13 Hyperspectral data cube 3.2 试验结果 试验结果如图12~图14所示。试验实现了高光谱与激光雷达数据的合成,且合成数据都具有扫描仪坐标信息和光谱信息,通过对比可以识别伪装,并对目标进行精确定位。图12为激光点云数据,图13为高光谱数据立方体,图14(a)为迷彩墙凸显的伪彩色图像,图14(b)为真彩色图像。图14(b)中迷彩墙和绿色草地颜色一致,界限不分明,但是从图14(a)中可以看出迷彩墙和绿色草地的颜色已经分开。说明在高光谱图像中,迷彩墙的伪装效果大打折扣。 图14 高光谱与激光合成数据Fig.14 Highspectrum and lidar synthesized data 高光谱具有识别伪装目标优势,但识别精细目标受限制;激光扫描技术可快速获取高精度战场环境数据,但缺乏光谱特征数据,揭露伪装能力弱,本文将二者结合,构建了共光路联测计算模型,设计了高光谱- 激光雷达共光路系统,并进行了试验。试验显示高光谱与激光合成数据能够将具有伪装的目标凸显出来,数据立方体可以提供每一个波段的光谱图像数据,也可以为每一个像元提供连续的光谱曲线,利用不同物质具有不同光谱特性的物理本质可以对区域内的目标进行分类和识别,为物质的分析提供有力的手段,从而实现空间目标的精确定位和属性识别。 但是,高光谱- 激光雷达共光路系统在应用中存在两个瓶颈:一是大数据的应用需要实时处理软件支撑;二是基于时间序列演变的全时域三维高光谱数据的数学问题需深入研究。 References) [1] 葛宪莹. 用于高精度微弱信号探测激光雷达的光机系统设计及优化[D]. 北京:北京理工大学, 2014. GE Xian-ying. Design and optimization of opto-mechanical structure for high accuracy weak signal detection lidar [D]. Beijing: Beijing Institute of Technology, 2014. (in Chinese) [2] Rieger P, Ullrich A. Resolving range ambiguities in high-repetition rate airborne light detection and ranging applications[J]. Journal of Applied Remote Sensing, 2012, 6(1): 635-652. [3] 童庆禧, 薛永祺, 王晋年, 等. 地面成像光谱辐射测量系统及其应用[J]. 遥感学报, 2010, 14(3):409-422. TONG Qin-xi, XUE Yong-qi, WANG Jin-nian, et al. Development and application of the field imaging spectrometer system[J]. Journal of Remote Sensing, 2010, 14(3):409-422. (in Chinese) [4] Prieto-Blanco X, Montero-Orille C, González-Nuez H, et al. The Offner imaging spectrometer in quadrature[J]. Optics Express, 2010, 18(12): 12756-12769. [5] 闫兴涛, 杨建峰, 薛彬, 等. Offner型成像光谱仪前置光学系统设计[J]. 红外与激光工程, 2013, 42(10): 2712-2717. YAN Xing-tao, YANG Jian-feng, XUE Bin, et al. Design of fore telescope system for Offner imaging spectrometer[J]. Infrared and Laser Engineering, 2013, 42(10): 2712-2717.(in Chinese) [6] 薛庆生, 林冠宇, 宋克非. 星载大视场短波红外成像光谱仪光学设计[J]. 光子学报, 2011, 40(5): 673-678. XUE Qing-sheng, LIN Guang-yu, SONG Ke-fei. Optical design of space borne shortwave infrared imaging spectrometer with wide field of view[J]. Acta Photonica Sinica, 2011, 40(5):673-678. (in Chinese) [7] 计忠瑛, 相里斌, 崔燕. 超光谱成像仪的实验室定标[J]. 航天器工程, 2010, 19(1):67-71. JI Zhong-ying, XIANG Li-bin, CUI Yan. Labsphere calibration of hyperspectral imaging spectrometer[J]. Spacecraft Engineering, 2010, 19(1):67-71. (in Chinese) [8] 裴舒. 成像光谱仪光谱定标[J]. 光机电信息, 2011, 28(11):48-51. PEI Shu. Spectral calibration of imaging spectrometer[J]. OME Information, 2011, 28(11):48-51.(in Chinese) [9] 罗磊,陈恳,马振书,等. 基于虚拟连杆机构的类圆柱体目标位姿获取[J]. 兵工学报, 2014, 35(6): 885-890. LUO Lei, CHEN Ken, MA Zhen-shu,et al. Position and pose measurement of cylinder-like object based on virtual pole mechanism[J]. Acta Armamentarii, 2014, 35(6): 885-890. (in Chinese) [10] 高静, 计忠瑛, 崔燕, 等. 空间调制干涉光谱成像仪的室外定标技术研究[J]. 光学学报. 2010, 30(5):1321-1326. GAO Jing, JI Zhong-ying, CUI Yan, et al. Outfield calibration analysis of spatially modulated imaging Fourier transform spectrometer[J]. Acta Optica Sinica, 2010, 30(5):1321-1326. (in Chinese) [11] 魏儒义. 时间调制傅里叶变换红外光谱成像技术与应用研究[D]. 北京:中国科学院大学, 2013. WEI Ru-yi. Study on time-resolved Fourier transform infrared spectral imaging technology and its applications[D]. Beijing: University of Chinese Academy of Sciences, 2013.(in Chinese) [12] 周磊, 彭妮娜, 张黎明, 等. 基于标准探测器的 FY-2(05) 星扫描辐射计可见通道外场定标[J]. 遥感技术与应用, 2007, 22(1):20-25. ZHOU Lei, PENG Ni-na, ZHANG Li-ming, et al. Detector based field radiometric calibration for the visible band of multi-channel scanning radiometer of satellite FY-2-05[J]. Remote Sensing Technology and Application, 2007, 22(1):20-25.(in Chinese) [13] 刘磊. 机载LIDAR系统误差分析与检校方法研究[D]. 济南:山东科技大学, 2011. LIU Lei. Analysis of error and calibration methods of airborne lidar system[D]. Jinan: Shandong University of Science and Technology, 2011.(in Chinese) [14] 许凯达,金伟其,刘敬,等. 基于激光距离选通的非视域成像特性分析[J]. 兵工学报, 2014, 35(12): 2003-2009. XU Kai-da, JIN Wei-qi, LIU Jing, et al. Analysis of non-line-of-sight imaging characteristics based on laser range-gated imaging[J]. Acta Armamentarii, 2014, 35(12): 2003-2009. (in Chinese) [15] Hase F, Wallace L, Mcleod S, et al. The ACE-FTS atlas of the infrared solar spectrum[J].Journal of Quantitative Spectroscopy and Radiative Transfer, 2010, 111(4): 521-528. [16] August T, Klaes D, Schlussel P, et al. IASI on Metop-A:operational level 2 retrievals after five years in orbit[J]. Journal of Quantitative Spectroscopy and Radiative Transfer, 2012, 113(11):1340-1371. Joint Survey Design and Test of Common Optical Path of Hyperspectral Lidar FU Cheng-qun1,FANG Liang1,2,XIE Li-jun1,WANG Yong1 (1.College of Field Engineering, PLA University of Science and Technology, Nanjing 210007, Jiangsu, China; 2.Unit 61175 of PLA, Nanjing 210049, Jiangsu, China) In order to accurately detect the distances, orientations and spectral properties of air, ground and underwater targets, the measuring principle and calculation model of common optical path of higyperspectral lidar are discussed, and a principle prototype design method is proposed. The detection test of common optical path of higyperspectral lidar is carried out. The synthetic data of hyperspectrum and lidar are generated, each point contains the scanner coordinate information and spectral information. By comparing the data before and after synthesis, the camouflaged targets can be identified, and the targets can be also accurately located. The experimental results show that the measuring method for common optical path of hyperspectral lidar is feasible. ordnance science and technology; hyperspectral imaging; laser scanning data; synchronous joint survey; design and test 2015-11-12 国家“863”计划项目(2014AA7042011) 付成群(1975—),男,副教授,硕士生导师。E-mail:fcq-7505@sohu.com; 方亮(1983—),男,硕士研究生。 E-mail:120594952@qq.com TN958.98 A 1000-1093(2016)11-2002-08 10.3969/j.issn.1000-1093.2016.11.006


2 高光谱- 激光雷达共光路设计


3 高光谱- 激光雷达共光路联测试验



4 结论
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31纺织标准与质量(2022年2期)2022-07-12黑龙江大学自然科学学报(2022年1期)2022-03-29今日农业(2021年19期)2022-01-12汽车观察(2021年8期)2021-09-01空间科学学报(2021年4期)2021-08-30空间科学学报(2021年1期)2021-05-22电子制作(2018年16期)2018-09-26雷达学报(2018年3期)2018-07-18汽车电器(2017年1期)2017-12-06
