
异步电动机无速度传感器矢量控制研究
2016-12-15 10:10杨俊翔杨高鹏
电气技术 2016年12期
周 喆 吴 俊 杨俊翔 杨高鹏 李 坤
(西南石油大学电气信息学院,成都 610500)
异步电动机无速度传感器矢量控制研究
周 喆 吴 俊 杨俊翔 杨高鹏 李 坤
(西南石油大学电气信息学院,成都 610500)
为了实现异步电动机矢量系统的无速度传感器控制,本文给出了自适应全阶磁链观测器的无速度传感器控制策略,利用李雅普诺夫稳定性定理证明了观测器的稳定性,并推导出了转速自适应率。搭建了基于自适应全阶磁链观测器的异步电动机矢量控制系统的仿真模型和实验平台,实现了异步电动机的控制。实验结果表明该控制系统在较宽的范围内具有良好的动、静态性能。
异步电动机;无速度传感器;全阶磁链观测器;矢量控制
随着电力电子技术的进步,变频器技术得到快速发展和应用,其中矢量控制技术以其控制精度高、低频特性好、转矩响应快等优点,成为高性能变频调速系统的首选方案[1-3],在高性能的交流调速系统中转速闭环控制是必不可少的环节。一般采用转速传感器来获取转速,而转速传感器的安装,增加了系统的成本,降低了系统的鲁棒性,应用场合受到限制。利有无速度传感器控制技术可以通过检测易测的电压和电流信号来估计转速,用该估计转速来实现转速闭环控制,可以消除由于安装转速传感器所带来的困难。为了实现无速度传感器器控制技术,文献[4]采用全阶磁链观测器的方法来估计磁链和转速,并通过合理的设计反馈增益矩阵,消除系统的低速不稳定区域。文献[5]采用改进的扩展卡尔曼滤波器的方法来估计磁链和转速,在d、q坐标系下选取定子电流分量和定子磁场角度为状态变量,构建3阶观测器,降低了系统的阶次、复杂性和运算负荷。文献[7]采用具有补偿的电压模型来估算磁链,并且使用双 DSP控制板和两电平控制器构成无速度传感器电动机控制系统,实现了无速度传感器控制。
本文采用自适应全阶磁链观测器来估计转速,在建立了异步电动机的数学模型的基础之上,推导出自适应全阶磁链观测器的数学模型;然后利用李雅普诺夫稳定性,证明系统的稳定性,并推导出转速自适应率;最后搭建基于自适应全阶磁链观测器的无速度观测器矢量控制系统的仿真模型和实验平台。仿真和实验结果表明了控制策略的正确性和有效性。
1 异步电动机数学模型
在静止两相参考坐标系下,感应电动机的状态方程可描述为[4]

2 自适应全阶磁链观测器

基于上式,并且引入反馈增益矩阵 G,可得到Luenberger观测器方程如下[5]

自适应全阶磁链观测器允许估计矩阵A中的存在一未知量转速rω,由于变化缓慢,被视为一个常数,为了导出转速自适应算法,可以运用Lyaponov定理。通常,定子电流和转子磁链的估计误差e可用下列方程描述为

在自适应全阶磁链观测器中,增益矩阵G的选取关系的观测器的稳定性和系统的稳态误差。本文选取选取的增益矩阵G表达式如下[4]

式中,k取1.5。
为了获得自适应全阶磁链观测器的转速自适应率,按照如下方法。
定义Lyapunov函数为


令式(7)右边的第二项等于第三项,可以得到转速估计的自适应律:

若选择合适的增益矩阵 G使得式(7)右边第一项为负半定,则转速自适应观测器是稳定的。为了加速转速估计器的响应速度,通常转速估计采用比例积分的自适应方案[5],即

3 仿真和实验结果分析
基于Matlab/Simulink仿真平台,搭建基于自适应全阶观测器的矢量控制系统,如图1所示。该系统主要有svpwm、坐标变换、自适应全阶磁链观测器等几个模块。感应电动机、逆变器、PI调节器、及测量模块等仿真模块参考文献[8-9]。感应电动机额定参数为:额定功率 PN=35kW,额定电压UN=380V,额定频率fN=50Hz,定子电阻Rs=0.4Ω,定子自感Ls=0.087H,转子电阻Rr=0.5Ω,转子自感Lr=0.088H,互感Lm=0.085H,极对数np=2,转动惯量J= 0.0876kg·m2,阻尼系数J=0.001kg·m2/s。
3.1 仿真结果及分析
(1)电动机在高速段运行:给定转速1000r/min,给定转子磁链幅值1Wb,电动机空载起动,在0.5s时突加负载50N·m,系统的转速响应和转子磁链响应分别如图2和图3所示。
(2)电动机在低速段运行:给定转速60r/min,给定转子磁链幅值1Wb,电动机空载起动,在0.5s时突加负载 50N·m,系统的转速响应和转子磁链响应分别如图4和图5所示。

图1 基于全阶磁链观测器的异步电动机无速度传感器矢量控制仿真
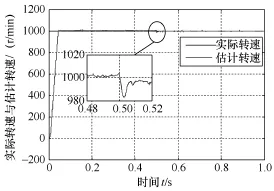
图2 1000r/min实际转速与估计转速波形

图3 1000r/min估计转子磁链波形

图4 60r/min实际转速与估计转速波形

图5 60r/min估计转子磁链波形
由图2至图5的仿真结果可知,基于自适应全阶磁链观测器的无速度传感器矢量控制系统,无论在高速还是低速都能够准确的估计转子磁链,进而实现转子磁链的准确定向,并且估计转速能够准确的跟踪实际转速,表明了自适应全阶磁链观测器的无速度传感器控制策略的正确性。
3.2 实验结果及分析

图6 实验硬件图
为了进一步验证该无速度传感器控制策略的正确性,本文基于 DSP28055控制芯片,搭建了基于自适应全阶磁链观测器的无速度传感器矢量控制系统的实验平台。实验硬件平台如图6所示。图7(a)为电动机在 1000r/min运行定子电流和转子磁链位置角,图7(b)所示为电动机在1000r/min运行时实际转速和估计转速波形。图 8所示为给定转速500r/min时、电动机空载起动、然后转速突变为300r/min的实际转速和估计转速的波形。

图7 电动机在1000r/min运行过程中的实验结果

图8 实际转速与估计转速
由图7可知,自适应全阶磁链观测器能够准确的估算出转子磁链和转速,异步电动机无速度传感器矢量控制系统能够稳定运行。由图8可知,电动机在起动过程、稳定运行过程和转速突变时候,估计转速都能准确的跟踪实际转速。
4 结论
本文介绍了异步电动机的数学模型,在这基础之上,推导出了自适应全阶磁链观测器数学模型,给出了转子磁链估计和转速估计的控制策略。搭建了基于自适应全阶磁链观测器的异步电动机无速度传感器矢量控制系统仿真模型,仿真结果表明,估计转速能够准确地跟踪实际转速和系统在较宽的转速范围内都具有较好的动、稳态性能。实验结果验证了无速度传感器控制策略的正确性和有效性。
[1]牛涛.异步电机矢量控制系统 DSP软件设计[J].微计算机信息,2008,24(14): 164-165.
[2]罗辉,胡泽,王文静,等.基于DSP的异步电机矢量控制系统设计与实现[J].电力电子技术,2008,42(9): 24-26.
[3]杨张利,王远干,游晓容.利用 DSP实现变频器的矢量控制和 SVPWM 技术[J].电子工程师,2007,33(10): 5-8.
[4]Suwankawin S,Sangwongwanich S.Design strategy of an adaptive full-order observer for speed-sensorless induction motor drives-tracking performance and stabilization[J].IEEE Transaction on Industrial Electronics,2006,53(1): 96-119.
[5]宋文祥,周杰,尹赟.感应电机转速自适应全阶磁链观测器的离散化[J].上海大学学报(自然科学版),2012,18(6): 582-588.
[6]许晓峰,许傲然.异步电机无速度传感器矢量控制研究[J].电力电子技术,2013,47(6): 71-73.
[7]李旭春,张鹏,赵非.改进 EKF的异步电机无速度传感器矢量控制[J].电机与控制学报,2013,17(9): 24-29.
[8]洪乃刚.电力电子和电力拖动控制系统的 MATLAB仿真[M].北京: 机械工业出版社,2006.
[9]贺晓荣,刘述喜,陈新岗.基于SVPWM的异步电机矢量控制系统仿真[J].计算机仿真,2007,25(4): 322-325.
Research on Speed Sensorless Vector Control for Asynchronous Motor
Zhou Zhe Wu Jun Yang Junxiang Yang Gaopeng Li Kun
(College of Electrical and Information,Southwest Petroleum University,Chengdu 610500)
In order to realize the induction motor vector control system without speed sensor ,a speed sensorless control strategy is proposed based on adaptive full order flux observer.The stability of the observer is proved by using the Lyapunov stability theorem,and the adaptive speed rate is given.The simulation model and experimental platform of the vector control system based on the adaptive full order flux observer are built to control asynchronous motor.The simulation and experimental results show that the control system has good dynamic and static performance in a wide range.
asynchronous motor; speed sensorless; full order flux observer; vector control
周 喆(1989-),男,河北省任丘人,本科,主要从事电机及其控制工作。
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
微特电机(2021年6期)2021-06-22
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2017年6期)2017-11-23
现代防御技术(2016年1期)2016-06-01
