
基于MATLAB的模糊PID参数自整定控制器设计与研究*
2016-12-14 02:04:53王晓侃
新技术新工艺 2016年11期
王晓侃,王 亮
(河南机电职业学院,河南 郑州 451191)
基于MATLAB的模糊PID参数自整定控制器设计与研究*
王晓侃,王 亮
(河南机电职业学院,河南 郑州 451191)
针对多数工业过程存在非线性、参数时变和模型不确定等问题,设计了一种基于模糊控制的自整定PID控制器。它能根据偏差和偏差变化的需要实时自动调整和优化PID参数。仿真结果表明,该模糊PID控制器具有控制精度高、快速性好和适应性强等优点,可以迅速消除系统误差,保证被控对象具有良好的静态和动态性能。
模糊控制;参数自整定;模糊PID;MATLAB
1 模糊PID参数自整定控制原理
在实际应用中,大多数工业过程都不同程度地存在非线性、参数时变性和模型不确定性等问题。对传统的PID控制来说,要求其模型结构非常精确,因而这种控制通常无法实现对过程的精确控制。众所周知,模糊控制不但具有良好的鲁棒性和适应性,而且对过程控制不需要建立精确的数学模型[1-2]。经研究,笔者综合传统PID控制和模糊控制的各自特点,设计了一种基于MATLAB软件的模糊PID参数自整定控制器。
为了满足不同时刻PID参数自整定控制的要求,需要把误差e和误差变化率ec作为模糊PID控制器的输入,同时可以在线对PID参数kp、ki、kd利用模糊控制规则进行修改。其控制方案原理如图1所示[3]。
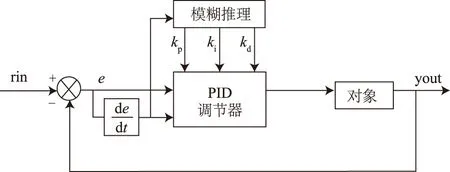
图1 自整定模糊PID控制器结构
为了使被控对象具有良好的动、静态性能,需要在控制器运行过程中在线不断检测和修改e和ec,以便及时地确定模糊自整定过程中PID的3个参数与e和ec之间的模糊关系,实现对控制参数的实时控制。将{NB,NM,NS,ZO,PS,PM,PB}7个模糊值作为e和ec的语言变量值,同时kp、ki、kd的语言变量值也定义为{NB,NM,NS,ZO,PS,PM,PB}7个模糊值,则可建立kp、ki、kd这3个参数整定的模糊规则表(见表1~表3)[4],表中Δkp、Δki、Δkd分别是kp、ki、kd的变化量。

表1 kp整定的模糊规则表
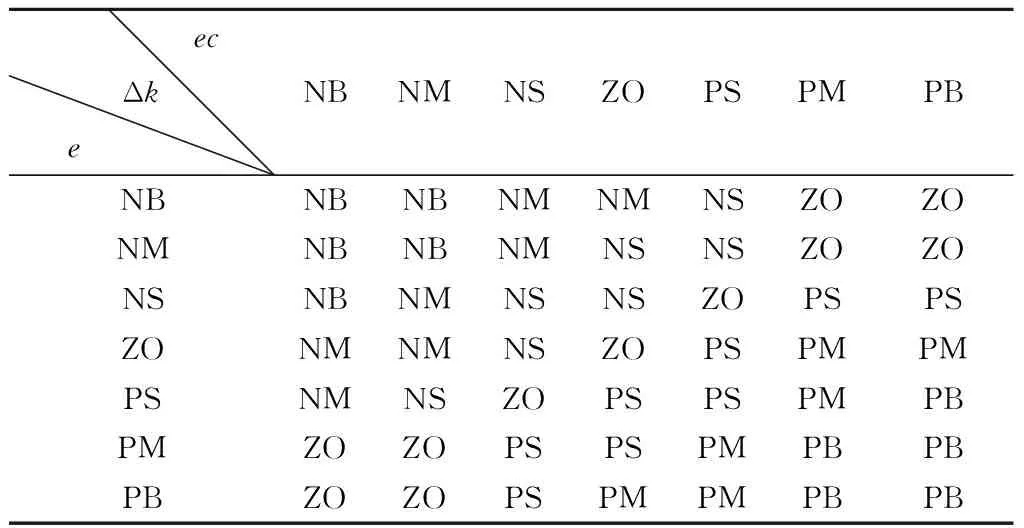
表2 ki整定的模糊规则表

表3 kd整定的模糊规则表
根据已经建立的模糊规则表,对kp、ki、kd进行动态的整定,选择分档模糊集进行模糊化和加权平均法进行解模糊。此处,kp′、ki′、kd′的预整定值采用常规修正真值方法进行整定,其计算公式如下[5]:
kp=kp′+Δkp
ki=ki′+Δki
kd=kd′+Δkd
PID参数在设计的模糊控制过程中在线实现模糊逻辑规则的结果处理、查表和计算,以实现在线自整定。
2 系统仿真分析
假设采用时间为1 ms,利用传统PID控制和模糊PID控制分别对假设的控制对象进行仿真比较。
2.1 未加扰动时的仿真
利用MATLAB/Simulink进行传统PID控制仿真时,控制器的3个参数设定值为:kp=0.4,ki=1,kd=0.005,可得到图2所示的阶跃响应曲线。利用Fuzzy工具箱和MATLAB编程,再利用Simulink模拟模糊自整定PID控制器,可以得到图3所示的阶跃响应曲线。

图2 传统PID响应曲线(未加干扰)

图3 模糊PID响应曲线(未加干扰)
2.2 在t=0.35 s时加入脉冲干扰的仿真
利用MATLAB/Simulink分析在t=0.35 s时加入幅值为1.5的脉冲干扰,可以得到其阶跃响应曲线分别如图4和图5所示。

图4 传统PID响应曲线(加干扰)
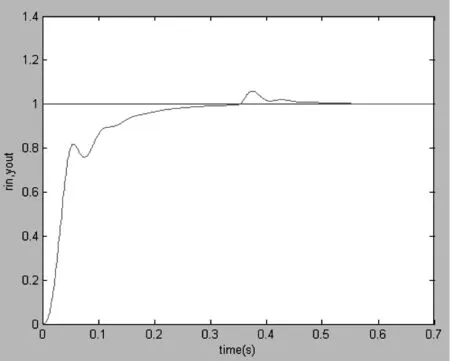
图5 模糊PID响应曲线(加干扰)
2.3 改变被控对象进行仿真
先假设被控对象为:
PID控制器的3个参数kp、ki、kd调整为kp=0.6,ki=0.5,kd=0.001,利用MATLAB/Simulink可以得到2种不同控制方法的阶跃输出响应曲线(见图6和图7)。

图6 传统PID输出曲线(被控对象改变)
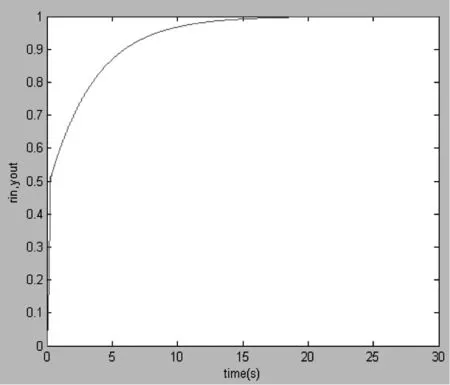
图7 模糊PID输出曲线(被控对象改变)
2.4 3种仿真结果比较
不同环境下的性能参数比较见表4。

表4 不同环境下的性能参数比较
由表4得出如下结论:1)与传统的PID控制相比,所设计的模糊PID自整定控制具有较小的超调量和较短的调节时间,因此其动态响应特性和稳态特性较好;2)模糊PID自整定控制可以在线根据工作过程中误差和误差变化率的变化进行自调整PID参数,使其具有较好的自适应能力;3)与传统的PID控制相比,若被控对象发生改变或加入干扰时,所设计的模糊PID自整定控制调节时间较短,抗干扰能力更好,其鲁棒性也较好。
3 结语
结合模糊PID自整定控制器的优化设计特点,MATLAB软件自身编程,以及Simulink仿真的优势,实现了模糊PID自整定控制和MATLAB软件的有机结合,并在线实时仿真和分析了模糊PID自整定控制器。仿真结果表明,模糊自整定PID控制器比传统PID控制器具有更好的性能指标,因此其具有一定的推广和应用价值。
[1] 周昭洋,李浙昆.基于MATLAB的高速公路隧道通风控制系统仿真研究[J]. 新技术新工艺,2014(2):66-69.
[2] 曹宾,王振宏.汽车线控四轮转向执行系统的仿真与分析[J]. 新技术新工艺,2014(7):43-45.
[3] 李世勇.模糊控制·神经网络和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,2003.
[4] 刘增良.模糊控制技术与应用选编[M].北京:北京航空航天大学出版社,2002.
[5] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
* 河南省教育技术装备和实践教育研究重点课题(GZS013) 河南省重点科技攻关项目(142102210042) 河南省教育厅科学技术研究重点项目(13B413968)
责任编辑 郑练
Design and Research based on Fuzzy PID-parameters Self-tuning Controller with MATLAB
WANG Xiaokan, WANG Liang
(Henan Mechanical and Electrical Vocational College, Zhengzhou 451191, China)
Design a parameter self-tuning PID-controller based on fuzzy control, which can adjust PID-parameters according to error and change-in-error. A simulation study of the system shows that the controller both includes the precise character of PID controller and the flexible advantage of fuzzy controller. It can eliminate the steady error of the system promptly.
fuzzy control, parameter self-tuning, fuzzy PID, MATLAB

TP 29
A
王晓侃(1980-),男,副教授,硕士,主要从事智能控制系统的研究与应用等方面的工作。
2016-07-14
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
机电工程技术(2018年10期)2018-12-06 02:26:38
天津教育·下(2018年9期)2018-07-13 08:25:47
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
电力自动化设备(2013年11期)2013-09-18 02:55:14
电气电子教学学报(2012年1期)2012-10-12 03:27:48
