
喷雾机全液压四轮转向系统设计与分析
2016-12-12 09:01:57夏长高罗汞伟
重庆理工大学学报(自然科学) 2016年11期
夏长高,罗汞伟
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
喷雾机全液压四轮转向系统设计与分析
夏长高,罗汞伟
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
以某高地隙自走式农用喷雾机的全液压转向系统为对象,针对其转向不灵活、转向半径过大的问题,设计出一种新颖的全液压四轮转向系统。根据喷雾机的总体设计要求确定转向器、转向动力缸、转向泵等液压元件的相关参数,然后基于AMEsim建立了转向系统机械-液压耦合模型,并在方向盘匀速慢转和匀速快转2种工况下进行了转向性能的动态特性仿真分析。仿真结果表明:该转向系统动态响应快、机动性能好,较好地满足了高地隙自走式农用喷雾机的作业要求。
自走式喷雾机;全液压;四轮转向;机械-液压耦合建模
高地隙自走式农用喷雾机是一种新型农业植保机械。转向系统性能直接影响到喷雾机的作业效率、轮胎的使用寿命、驾驶员的操纵性以及直线行驶的性能。目前,国内自走式农用喷雾机前轮液压转向,后轮通过杆件传动随动转向,其转向半径较大,转向精度较低。当农田可供喷雾机转向的半径较小时,对喷雾机施药效率产生严重影响,同时喷雾机反复前进、倒退,使得作物受到碾压,影响作物的产量。
由于全液压转向系统没有摇臂、螺杆和随动杆等机械结构,很大程度上简化了转向机构,从而解决了机械磨损和间隙变化等带来的问题,可靠性和稳定性均得到明显提高,因此在工程车辆上的运用较为广泛。液压元件和系统一般都是时变的非线性系统,因此使用传递函数分析其动态特性时不仅模型复杂、工作量大,而且对元件和系统的动态特性不能进行准确有效的分析[1-5]。而AMESIM提供了一种半物理化等效建模方式,使其能全面反映元件的实际结构,从而更方便地分析其动态特性[6]。吉林大学的赵峰[7]、王刚[8]将AMESIM用于全液压两轮转向的工程车辆的研究,并验证了其可行性和优越性。将AMESIM用于全液压四轮转向系统设计方面的研究目前未见报道。
1 全液压四轮转向系统方案选定
如图1所示,所设计的农用喷雾车转向系统主要由恒流泵、全液压转向器、2个转向动力缸、手动换向阀等部件组成。该转向系统操纵方向盘所需的转向力矩小、转向灵活轻便,而且其组成元件少、质量轻、尺寸小,使得整个转向系统的结构更加紧凑,还能在发动机熄火时实现人力转向[9]。
如图2所示:当手动换向阀处于中位时,恒流泵提供的液压油经转向器A口进入前转向动力缸A口,再由前转向动力缸B口,经转向器B口回油箱,此时喷雾车处于前轮转向模式;当拨动手动阀向上移动时,恒流泵提供的液压油经转向器A口进入前转向动力缸A口,再由前转向动力缸B口,进入后转向动力缸B口后回油箱,此时喷雾车处于向心转向模式;当拨动手动阀向下移动时,前转向动力缸B口的液压油进入后转向动力缸A口,此时喷雾车处于蟹形转向模式。(下面只研究四轮转向模式)
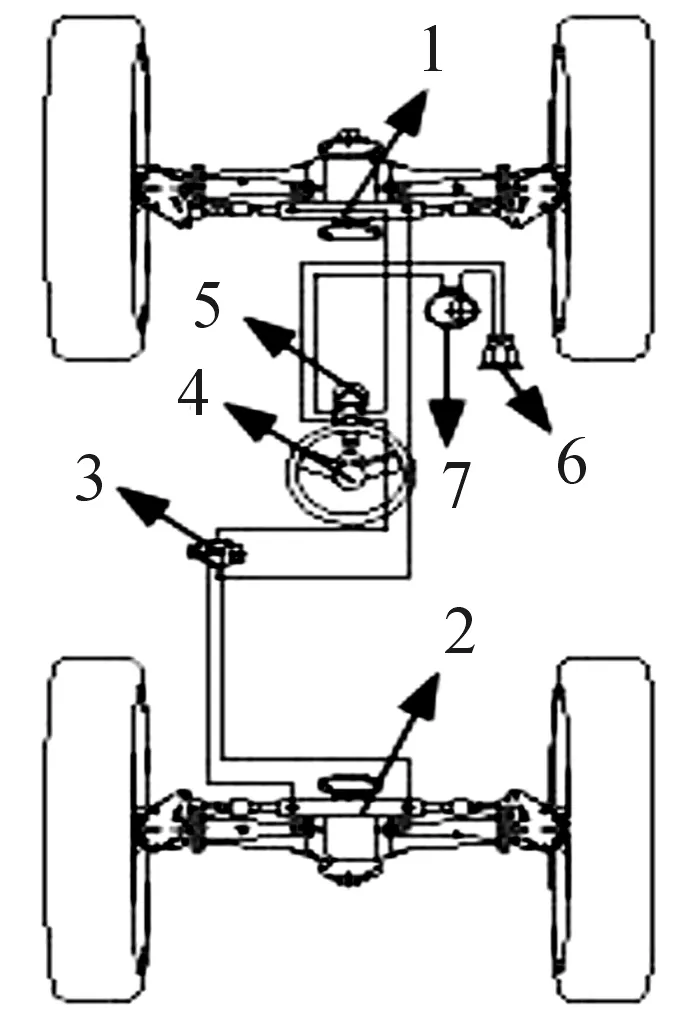
1.前转向动力缸; 2.后转向动力缸; 3.手动换向阀; 4.方向盘; 5.后转向动力缸; 6.恒流泵; 7.油壶。
图1 四轮转向系统液压结构示意图

1.恒流泵; 2.转向器阀块; 3.全液压转向器; 4.前转向动力缸; 5.后转向动力缸; 6.油壶; 7.三位四通手动换向阀; 8.滤清器。
图2 四轮转向系统液压原理
2 转向系统数学模型的建立
2.1 全液压转向器的数学模型
转向系统建模的难点在于全液压转向器的建模。在建立转向器数学模型时,进行了一些忽略与假设:忽略了管路沿程的损失、计量马达油缸等的泄漏、阀与管路的局部损失等;假定液压油的弹性模量、密度、阻尼孔的系数及黏度均为常数。在此基础上,可变阻尼孔等效转向器内的各个节流口,通过计量马达的动力平衡方程、流量方程等建立转向器的数学模型。
在图3中将可变节流孔A等效转向器相间的6个P孔,将可变节流孔B等效连通计量马达进油腔的6个H孔, 将可变节流C 等效连通计量马达回油的另外6个H孔,将可变节流D 等效转向器的A(B)口,将可变节流E等效转向器的回油口 B(A)口。

图3 转向器等效原理
通过可变节流孔A的流量:
即
(1)
通过可变节流孔B的流量:
即
(2)
对于计量马达,根据连续性方程有
(3)
根据动力平衡有
(4)
通过可变节流孔C的流量为
即
(5)
通过可变节流孔D的流量
即
(6)
经过整理得
(7)
式中:A1~A4分别代表可变节流孔A、B、C、D过流面积(m2);Cd为可变节流孔的流量系数;QS为通过可变节流孔的流量;P1~P4分别代表各个可变节流孔的压力(Pa);PS为转向器入口的压力(Pa);PC为进入可变节流口B的压力;MF为计量马达的阻力矩(N·m);Dm为计量马达单位弧度排量(cm3/rad);Jm为计量马达的转动惯量(N·m·s2);Bm为黏性阻尼系数(N/(m/s));G为弹簧的扭转刚度(N·m/rad);θ为计量马达转子的转角(rad);θm为转向器阀芯与阀套之间的相对转角(rad);ρ为液压油的密度(kg/m3)。
2.2 转向动力缸数学模型
转向器输出的液压油作用在前转向动力缸A口,前转向动力缸的B口流出的液压油进入后转向动力缸的B口,从而推动两端活塞杆反向运动,使车体进行转向。喷雾车转向的快慢与方向盘转动的速度有关,而方向盘转向的角度与转向器输出油液的体积成一定的比例关系。前后2个同型号的双出杆转向动力缸采用串联的方式连接,假设2个转向油缸为一个双出杆转向动力缸,如图4所示。

图4 转向动力缸等效原理
(8)
(9)
(10)
根据转向动力缸的力平衡方程有:
A(P1-P2)=FL-FM
(11)
式中:P1、P2为转向动力缸进、出油口压力(Pa);Q1、Q2分别为转向动力缸进、出油口流量(L/min);V1、V2分别为转向动力缸进、出油腔的体积(m3);Cip、Cep分别为转向动力缸的内、外泄漏系数;X为转向动力缸活塞运动速度(m/s);A为转向动力缸活塞面积(m2);FL为作用于转向动力缸活塞上的外力(N);FM为转向动力缸内部摩擦力(N)。
3 仿真分析
3.1 转向系统模型的建立
对全液压四轮转向系统的建模,难点在于对全液压转向器的建模。以往全液压转向器的建模大都采用等效阻尼孔的方式,即把转向器各个阀口用等效阻尼的形式来代替。这种建模方式能较好地对全液压转向器进行仿真研究,但由于忽略了较多重要因素,如转向器阀芯与阀套相对位移变化、转向器阀芯与阀套的质量等[7-8],不能准确地体现转向器的动态特性。
通过使用AMESim软件的HCD库对转向器与转向动力缸的建模,可以更全面地反映出转向系统的动态特性,如图5所示。对转向器建模时,将转阀的转动等效为滑阀的平动,转阀阀芯转动过程中,转阀各个阀口的通流面积等价于转阀展开后,阀芯平动对应距离时所形成的各个阀口的通流面积,由此将转阀阀芯展开为滑阀阀芯。而转向泵和油缸为常用元件,标准库中有现成模型,只需设置相应的参数即可。

图5 全液压四轮转向AMEsim模型
3.1 仿真参数的设定
在AMESIM参数模型下设定参数,由转向器的实际结构知转向器阀芯直径为32 mm,且转向器的排量为80 mL/r。根据公式:
(12)
得D=31.83 mm。
将转向器展开,以方向盘的转动速度n转化为平动后的速度作为转向器的输入信号:
v=πDn=100.53n
(13)
在建模过程中,用油缸的模型等效替换计量马达。计量马达的排量与油缸模型的作用面积对应,由公式得
(14)
经测量可得,转向器阀芯与阀套之间相对转角为9°,则其相对位移为
(15)
式中:Q为转向器排量(mL/r);D为转向器阀芯的等效直径(mm);s为转向器旋转一周阀芯的位移(mm);d为等效油缸模型中油液作用面积的直径(mm);V为计量马达的排量(mL/r)。参照样车并计算选定转向动力缸内径为45 mm,活塞杆径为25 mm,行程为80 mm;液压泵排量为5 mL/r,转速为2 000 r/min;设定溢流阀的溢流压力为15 MPa。
3.2 转向器动态仿真
控制信号设定方向盘输入的转速为0.5 r/s,模拟方向盘从对中位置转动到极限位置时转向器的动态响应。
由图6可知:当方向盘转动后,阀芯的位移便随之增加,而阀套并没有同时开始移动,从0.05 s开始,阀套开始移动,而且阀芯的位移大于阀套。在2.35 s处,转向动力缸的活塞运动到极限位置,阀套停止移动,此时阀芯的位移逐渐减小,直到与阀套的位置达到一致。
由图7可知:当方向盘匀速转动时,阀芯和阀套的相对位移迅速增加到2.52 mm,转向器的进油口迅速开启,保证了转向系统的转向灵敏性;当方向盘转速保持不变时,转阀阀芯与阀套之间的相对位移基本保持不变。上述理论计算和仿真结果的对比分析初步验证了模型的正确性。

图6 阀芯与阀套的位移
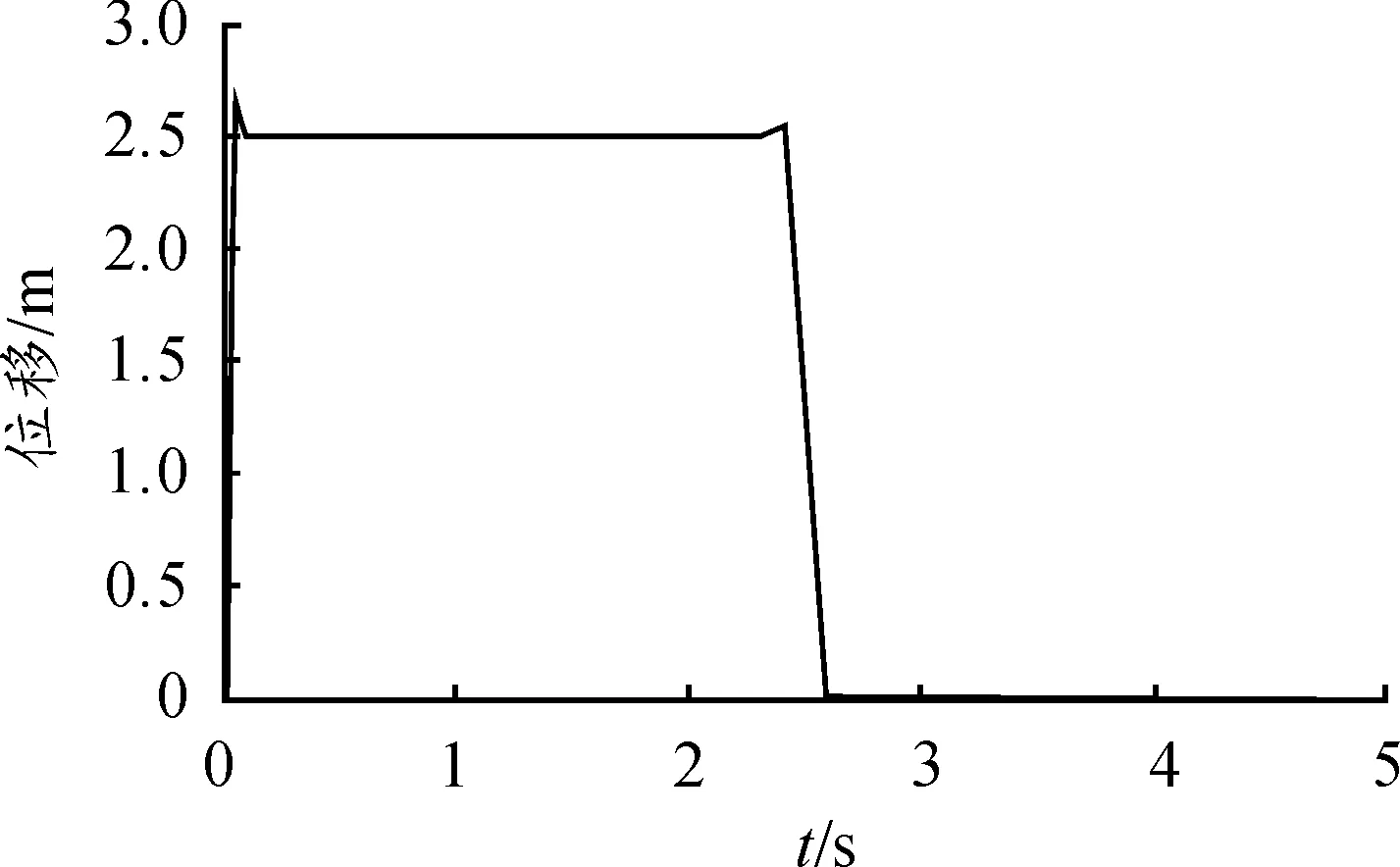
图7 阀芯与阀套的相对位移
3.3 方向盘转速的影响
在喷雾车满载的情况下,分别设定方向盘转速慢转和匀速快转,得出的仿真结果如图8~11所示。
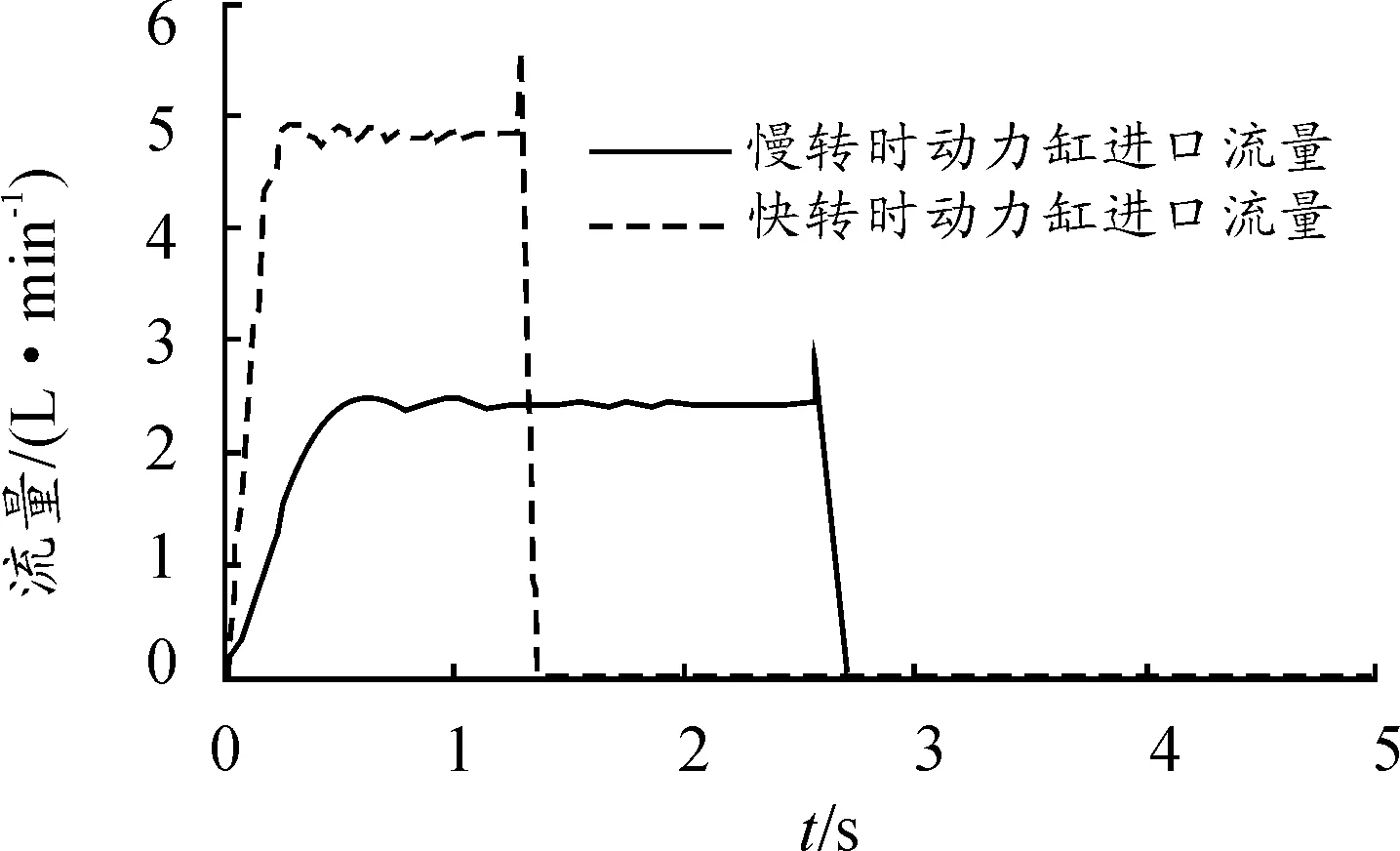
图8 转向动力缸流量
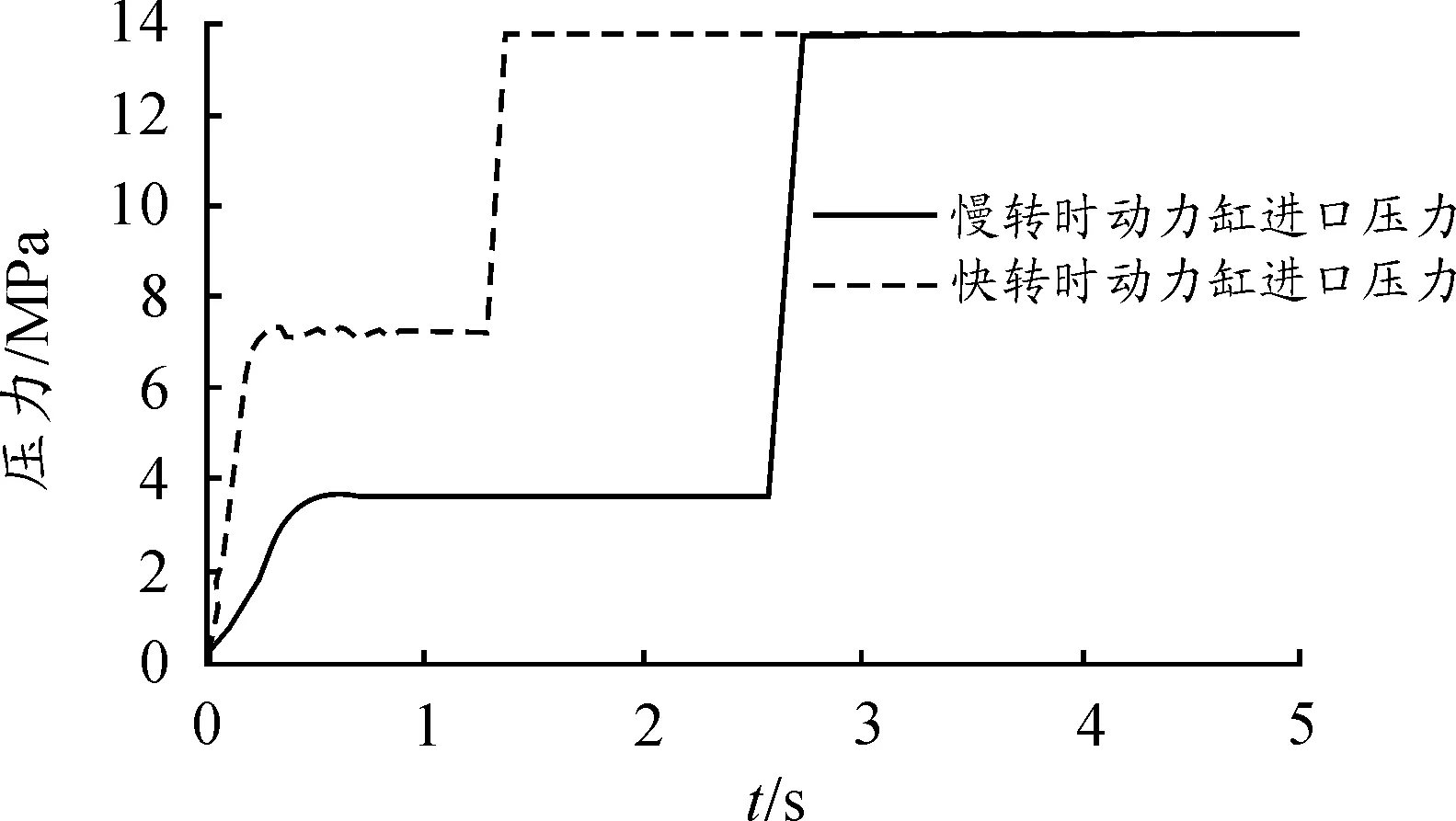
图9 转向动力缸压力
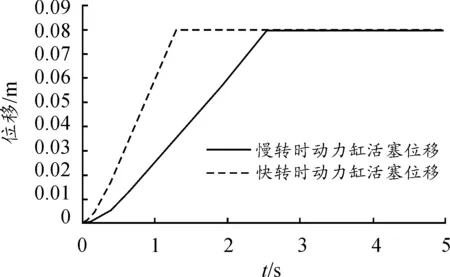
图10 转向动力缸位移
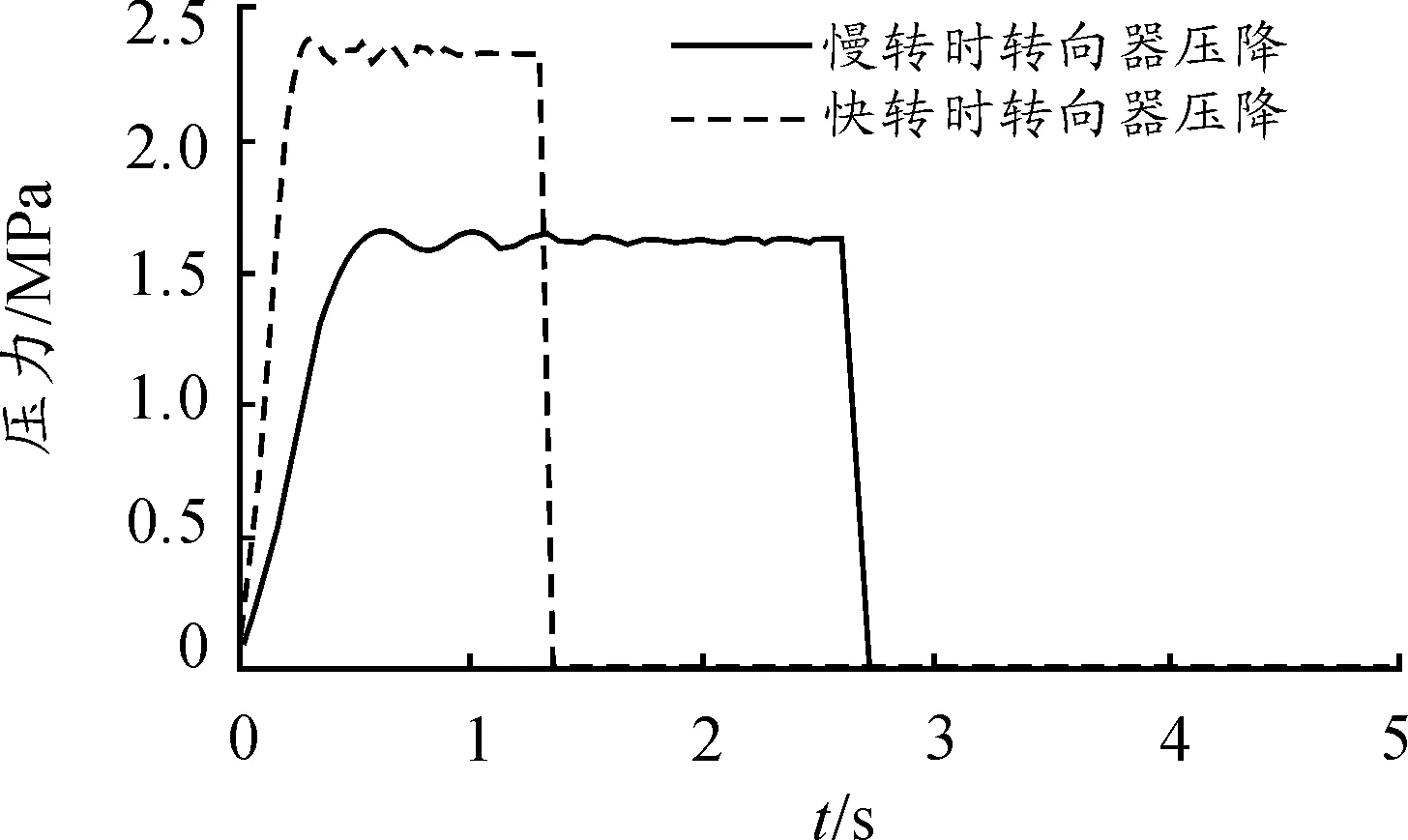
图11 转向器压降
数据对比见表1。从仿真结果可以发现:相同工况下快转和慢转的变化趋势基本一致,但快速转向时转向动力缸流量、压力与活塞位移的速度均明显大于慢速转向。也就是说,随着方向盘转速的增加,动力缸进油口的流量、压力、活塞的运动速度、转向器的压力损失都随之增加。由此可见,方向盘的转速对转向系统有较大影响。
从图9中还可以看出:慢转时压力的波动较小,压力变化平稳;相对于慢速转向,快速转向压力变化大,系统压力明显升高,而当动力缸运动到极限位置后,压力迅速达到溢流压力,系统开始溢流。

表1 慢速与快速转向仿真结果对比
4 结束语
针对以往大多采用等效阻尼孔的方式建立全液压转向器的AMEsim模型,而忽略其内部结构,通过使用AMESim软件HCD库对转向器的建模,可以更准确地反映转向系统的动态特性。转向器数学模型与转向器的AMEsim模型结果基本吻合,初步验证了所建立的数学方程和AMEsim模型的正确性。
通过比较方向盘匀速慢转和匀速快转在两种工况下转向动力缸进油口的流量、压力、活塞位移、转向器的压力损失的变化可以发现:方向盘的转速对转向系统有较大影响。而无论方向盘匀速慢转或者匀速快转,转向系统均能准确、稳定地进行工作,验证了所设计的四轮转向系统的可行性,为样机的设计生产提供理论基础。
[1] 韩振南,陈光.基于神经网络三自由度非线性四轮转向汽车控制仿真[J].机械设计与制造,2011(11):224-226.
[2] 郭孔辉,轧浩.四轮转向的控制方法的发展[J].中国机械工程,1998(3):73-75.
[3] 殷国栋,陈南.四轮转向控制技术的理论及应用研究[J].山东交通学院学报,2008,6(2):10-13.
[4] CHEN L,CHEN Nan,CHEN Y D.On fractional control method for four-wheel-steering vehicle.Science in China Series E:Technological Sciences[J].Science in China Press,2009,52(3):603-609.
[5] 李永堂,雷步芳,高雨茁.液压系统建模与仿真[M].北京:冶金工业出版社,2003.
[6] 赵璐.大型履带式起重机卷扬液压系统的动态特性研究[D].长春:吉林大学,2011.
[7] 赵峰.装载机全液压转向系统机液联合仿真与实验研究[D].长春:吉林大学,2012.
[8] 王刚.同轴流量放大全液压转向系统特性研究[D].长春:吉林大学,2014.
[9] 孟兆磊,姜勇,王娟,等.基于AMEsim的矿用汽车全液压转向系统建模与仿真[J].机床与液压,2014(5):111-113.
(责任编辑 陈 艳)
Design and Analysis of Sprayer with Full Hydraulic Four-Wheel Steering System
XIA Chang-gao, LUO Gong-wei
(School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China)
According to the problem of the steering is not flexible and the steering radius is too large, the full hydraulic steering system of the highland clearance self-propelled agricultural sprayer was used as research object to design a new full hydraulic four-wheel steering system. The related parameters of the hydraulic components including steering, steering pump, power cylinder and so on were decided according to the requirement of general design of the sprayer, and then mechanical-hydraulic coupled modeling was designed for the steering system by AMEsim, to research on its steering performance dynamic characteristic, including slowly and fast turn the steering wheel under two uniform motion conditions. The results show that the fast dynamic response and good mobility well meet the operational requirements of the highland clearance self-propelled agricultural sprayer.
self-propelled agricultural sprayer; full hydraulic; four-wheel steering; mechanical-hydraulic coupling model
2015-08-23 作者简介:夏长高(1965—),男,江苏兴化人,博士,教授,博士生导师,主要从事汽车系统动力学与控制研究,E-mail:xiacg@ujs.edu.cn。
夏长高,罗汞伟.喷雾机全液压四轮转向系统设计与分析[J].重庆理工大学学报(自然科学),2016(11):65-70.
format:XIA Chang-gao, LUO Gong-wei.Design and Analysis of Sprayer with Full Hydraulic Four-Wheel Steering System[J].Journal of Chongqing University of Technology(Natural Science),2016(11):65-70.
10.3969/j.issn.1674-8425(z).2016.11.012
TH16;TP391.73
A
1674-8425(2016)11-0065-06
猜你喜欢
农业开发与装备(2022年7期)2023-01-05 10:15:01
装备制造技术(2022年7期)2022-10-21 04:12:50
玩具世界(2022年1期)2022-06-05 07:42:26
西南石油大学学报(自然科学版)(2019年2期)2019-04-25 13:08:46
中小企业管理与科技(2019年3期)2019-03-07 06:31:10
农机使用与维修(2018年3期)2018-03-23 11:42:46
林业机械与木工设备(2017年3期)2017-03-08 07:55:35
筑路机械与施工机械化(2015年11期)2015-07-01 16:28:45
汽车零部件(2014年5期)2014-11-11 12:24:26
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:38
