BCF推进模式仿生机器鱼的研究现状与发展趋势
2016-12-06 01:35王扬威闫勇程
微特电机 2016年1期
王扬威,于 凯,闫勇程
(南京航空航天大学,南京 210016)
BCF推进模式仿生机器鱼的研究现状与发展趋势
王扬威,于 凯,闫勇程
(南京航空航天大学,南京 210016)
身体/尾鳍推进(Body and/or Caudal Fin propulsion,BCF)模式是自然界大多数鱼类采用的游动方式,相比中央鳍/对鳍推进(Media and/or Paired Fin propulsion,MPF)模式而言,在游动速度、高速推进效率以及加速性能上具有无可比拟的优势。BCF推进模式的研究是目前研究人员实现仿生机器鱼高速游动和高效推进的主要手段。介绍了仿生机器鱼广泛采用的致动器,综述了BCF推进模式仿生机器鱼的研究现状,对比分析了不同致动器驱动仿生机器鱼的特点和性能,讨论了仿生机器鱼研究的关键技术和发展趋势。
仿生机器鱼;BCF推进模式;致动器
0 引 言
鱼类经历了数亿年的自然选择,进化出了高超的游动本领,不但能通过尾鳍的摆动形成向前游动时的推进力,还可充分利用身体周围的流体动能,从而实现较高的游动速度和游动效率。而其对身体各部分优秀的协调控制能力更使其能够实现小于0.3BL(Body Length,BL)的转弯半径和低噪声的游动运动[1]。
伴随人类对海洋开发利用脚步的逐步加快以及仿生学、流体力学和计算机科学等相关学科及技术的发展,具备高效低噪、灵活机动等特点的鱼类成为了水下机器人和航行器的模仿对象。传统的仿生水下机器人主要采用电机实现驱动,具有驱动力大、控制方便等优点,但同时存在结构复杂、动作生硬、柔性不高以及噪声大等缺点[1],难以真正地实现鱼类游动的高效率性和高隐蔽性。将智能材料作为致动器应用于仿生机器鱼,使得仿生机器鱼可以较好的
实现了微型化、高柔性、低噪声以及简单的结构,因此逐步成为了水下仿生机器人驱动器的主要发展趋势。
1 鱼类游动方式
1926年,Breder根据鱼类推进时所使用的身体部位的不同将鱼类运动方式分为: BCF推进模式和MPF推进模式[1]。
MPF模式的鱼类占总类的约15%,以背鳍、腹鳍、胸鳍和臀鳍作为主要推进部位。在低速情况下可保持较高的机动性、稳定性以及较高的游动效率,一般可实现精确的六自由度运动、位置保持以及换向等动作,但是难以实现高速游动且加速性不足。
BCF模式是大多数的鱼类采用的游动模式,通过波动或摆动部分身体和尾鳍的方式,利用涡流将水向身后推射从而利用水的反作用力实现鱼体的向前运动。在高速巡游时,可实现较高的游动效率(一般80%以上),且加速和起动性能良好。图1的典型BCF模式[4]中,参与推进的身体部分越大,其机动性越高;参与推进的身体部分越小则推进的效率越高、游动速度越高。相关资料表明游速最快的箭鱼其游动速度可达110 km/h。

图1 典型BCF推进模式鱼类[4]
2 应用于机器鱼推进的致动器
目前应用传统电动、液压、气压方式驱动的大中型仿生机器鱼仍然保持着游动速度快、推进力大等明显的优势,并且已能够投入到实际使用中。而随着仿生机器鱼的微型化发展,智能材料的优势则愈发明显。目前应用在仿生机器鱼上的智能材料主要包括形状记忆合金(Shape memory alloy,SMA)、电致动聚合物(Electroactive Polymer,EAP)、压电材料(Piezoelectric Transducer,PZT)等。
2.1 形状记忆合金
SMA具有在低温下进行的较大变形,随着温度上升到一定值后恢复到原有形状的特质,即形状记忆效应(SME)。如图2所示,SMA在外力下发生塑性变形,其内部的孪晶马氏体相变成应力诱发马氏体,温度上升至相变温度后,其金相组织转变为高温下的奥氏体,其外形回复到形变前的固有形状,冷却后回复到孪晶马氏体相。目前性能最好、应用最为广泛的镍钛(Ni-Ti)系列SMA是一种坚固的、机械和化学性质稳定的材料,其应力一般高于200 MPa,收缩量可超过8%,相当于一般金属的弹性变形的几十倍。在合适的使用应力以及变形量下可循环使用达数十万次,且保持较好的形状记忆效应。由于其较大的收缩量和较高的应力,SMA丝被普遍认为是一种性能良好的人工肌肉。
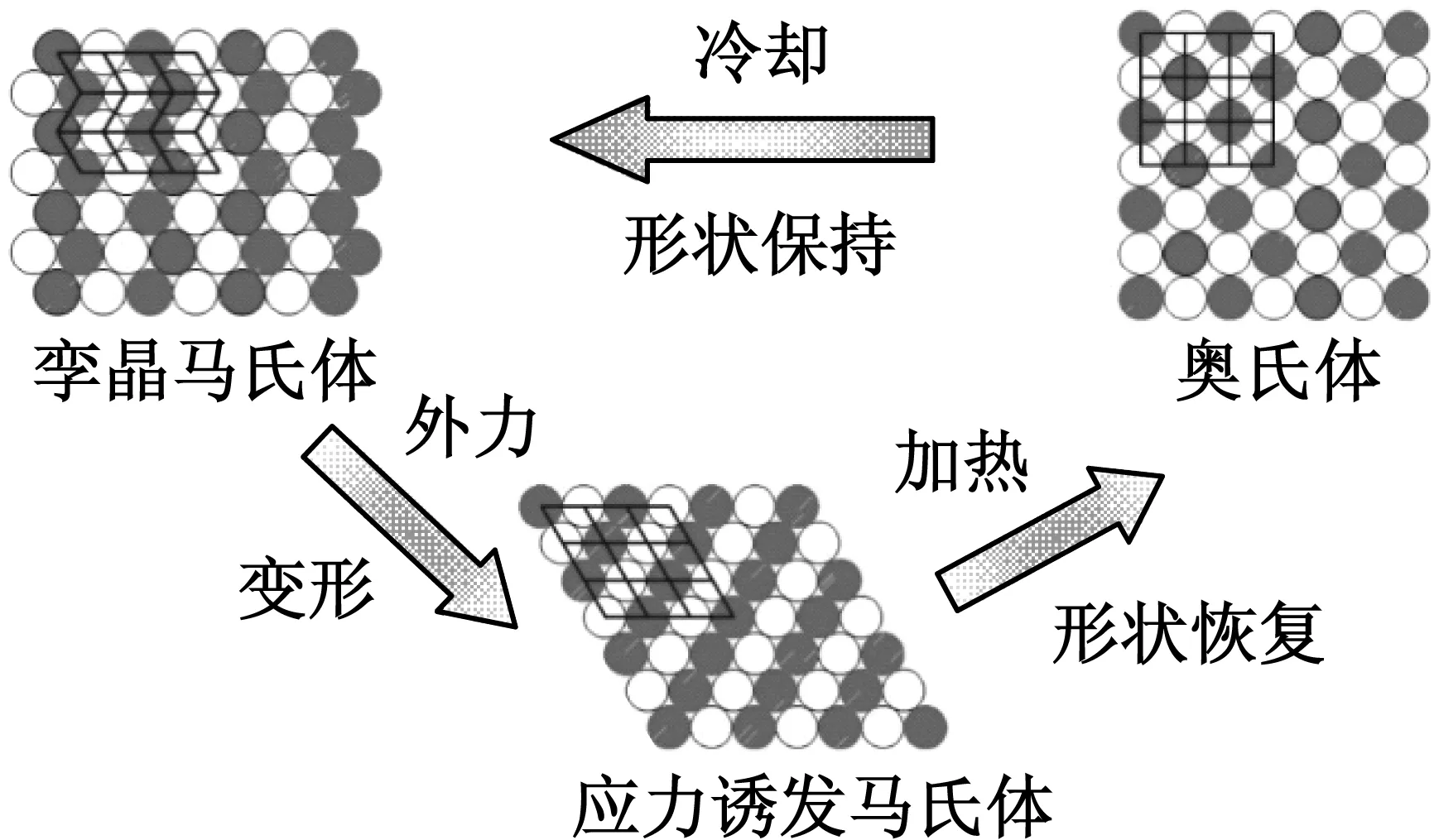
图2 SMA相变示意图
2.2 电致动聚合物
EAP主要包括离子型和电场型两大类型,目前在仿生机器鱼的应用主要采用离子型EAP中的离子聚合物-金属复合物(Ionic Polymer Metal Composites,IPMC)。在没有外加电压的情况下,IPMC内部的阳离子与部分水分子形成的水合阳离子可自由移动并在材料内部均匀分布,加上外部电压后IPMC的两个表面间形成电势差,水合阳离子向负极移动,使得IPMC在负极膨胀,正极的水分子含量减小, IPMC正极收缩,从而宏观上表现为向正极弯曲。实际应用中IPMC具有使用寿命长、响应速度快、体积小、质量轻、柔性好、驱动电压低等优点并且适合微型化发展。但也存在着驱动力小且不能在离子溶液中使用等不足。
2.3 压电材料
PZT是一种具有压电效应、能够往复转换机械能和电能的功能材料。在仿生机器鱼上的应用主要是利用其逆压电效应,通过对压电陶瓷施加交变电场引起内部正负电荷中心发生相对位移而被极化位移,导致电介质发生形变,宏观表现为晶体的机械变形。仿生机器鱼中采用PZT材料制成的驱动器,具有驱动力大、响应快、驱动功率低、控制精度高和分辨率高等优点,而新型压电纤维材料则具有易于应用、功率密度高、有效的弯曲致动以及重量轻等优点,其主要缺点是其位移量小、驱动电压高并且通过扩大机构、提高位移会导致输出力衰减等。
3 BCF模式仿生机器鱼研究现状
目前仿生机器鱼的驱动方式以传统的电机驱动方式为主,由于其易于控制、驱动力大等特点,现已实现了较好的游动性能。智能材料驱动的机器鱼省去了齿轮、活塞、关节、铰链等传动机构,以简单的机构实现复杂的运动并具有较好的柔性,能够更好地实现运动过程中的低噪声和隐蔽性,更接近真实的鱼类运动。
3.1 传统驱动方式的机器鱼
1994 年,美国麻省理工学院成功研制了世界上第一条真正意义上的仿生机器鱼“RoboTuna”[5],如图3(a)所示。通过模仿蓝鳍金枪鱼的尾鳍推进原理,成功解决了传统水下机器人连续工作时间短的限制,其推进效率达到91%。动力部分由6台2.21 kW电机驱动,其整体结构由多达2 843个零件组成。该机器鱼尺寸为1.25 m×0.3 m×0.2 m,其游动速度可达到1.67 BL/s。

(a) 机器鱼Robotuna (b) 机器鱼VCUUV (c) 机器鱼Fish-G9

(d) 气动仿生七鳃鳗 (e) 气动机器鱼 (f) 机器鱼SPC-Ⅱ
1998年,美国麻省理工学院与Draper 实验室联合研制了仿黄鳍金枪鱼“VCUUV”[6],如图3(b)所示。该机器鱼采用循环液压驱动,用于探索鱼类如何利用涡流辅助推进,其自主游动实验显示了该机器鱼具有良好的减阻性能。该VCUUV尺寸为2.4 m×0.5 m×0.4 m,尾鳍展长 0.65 m,重136 kg,驱动频率1 Hz时获得最高游速0.5 BL/s,最大转弯速度75 (°)/s。
2005年,英国埃塞克斯大学研制了仿生鲤鱼“fish-G9”[6],如图3(c)所示。其由三个伺服电机构成尾部驱动并利用直流电机调节重心,微型水泵改变机器鱼自身重量,能够实现自主三维游动。通过研究机器鱼的流体力学机制,从而对机器鱼实现了更为精确的游动控制,研究者还对机器鱼的直线巡游和C型启动做了相关的研究。该机器鱼体长为0.52 m,最快游速可达1 BL/s,最小转弯半径为0.3 BL。
2011年,意大利圣安娜高级学校生物机械研究所研制了一条由多关节构成的仿生七鳃鳗[8],如图3(d)所示。其利用相邻关节内永磁铁磁极之间的相斥和相吸作用来驱动自身,并通过规律性变换磁极方向来实现身体的规律性波动。实验证明了该驱动方式的高效性,其在最佳游动状态下可实现5 h的续航。该机器鱼还采用了基于双目视觉的视觉导航系统来辅助实现自主游动。其总长为0.99 m,在0.6 Hz驱动频率下波长为1.2 m时,可达最高游速为0.7 BL/s。
2013年,麻省理工学院电气工程与计算机科学系研制了新型气压驱动的仿生机器鱼[9],如图3(e)所示。机器鱼的能源供给由一个8 g的二氧化碳的高压气罐,直接利用高压流体驱动,无需能量转化,从而提高其效率。该机器鱼同时具备快速加速性能和持续运动能力,研究发现,其逃生响应模式下的运动性能和可控性与真实鱼类接近。该机器鱼全长339 mm,柔性尾部长159 mm,其中尾鳍长34 mm,宽51 mm。
国内比较典型的仿生机器鱼是北京航空航天大学机器人研究所于2003年研制的SPC-II 机器鱼[10],如图3(f)所示。该机器鱼由两台150 W的伺服电机驱动,其设计首要考虑了游动的稳定性,其控制系统可实现手动控制、航向控制、GPS 航线游动3种模式并且可以自主调节各关节的摆动频率、幅度和相位差。SPC-II 长度约1.2 m,最高游速1.17 BL/s,转弯速度30 (°)/s,最小转弯半径1 BL。
随着智能材料的发展,越来越多的仿生机器鱼采用与鱼类肌肉性能类似的智能材料作为致动器,简化了仿生机器鱼的推进装置,提升了动作柔性、降低了游动过程中的噪声以及改善了机器鱼的流体力学性能。
3.2 SMA驱动的机器鱼
2000年,美国东北大学海洋科学中心首次采用SMA丝研制了仿生七鳃鳗[11],如图4(a)所示。其通过全身的波动运动实现推进,为典型的鳗鲡式游动方式。其柔性身体和柔性的随动尾鳍共占整体长度的85%。通过间隔的规律性加热SMA丝来实现仿生七鳃鳗整个身体的柔性波动。该仿生七鳃鳗可实现低速慢游、常速游动、急速游动、爬行前进、爬行后退、转弯、钻孔等多种运动方式。

(a) 仿生七鳃鳗 (b) 仿蓝鳍金枪鱼 (c) SMA丝驱动机器鱼

(d) 仿生机器鱼 (e) SMA弹簧机器鱼 (f) 微型仿生机器鱼
2008年,加拿大维多利亚大学机械工程系研制了SMA丝驱动的蓝鳍金枪鱼[12],如图4(b)所示。其由刚性头部和柔性鱼尾组成,头部和鱼尾各占整体长度的50%。合金丝的收缩量约为5%,受限于SMA丝复杂的散热条件以及控制软件,该鱼尾的最高摆动频率为0.5 Hz。其总长度为1 m,最大摆幅5.7 cm,最大攻角17°,推进力的峰值为1 N。
2008年,日本九州大学研制了合金丝驱动的仿生机器鱼[13],如图4(c)所示。其尾部嵌入合金丝驱动单元并采用分段二进制控制方法(SBC)控制合金丝的收缩。实验将合金丝分为三段,进行了多种加热方式实验。机器鱼包含尾鳍的尺寸为470 mm×90 mm×60 mm,总质量为850 g。利用SMA丝驱动且摆动频率为0.83 Hz时,实现最快游速0.15 BL/s。
2011年,西班牙自动化与机器人技术中心与研制了SMA丝驱动的仿生机器鱼[14],如图4(d)所示。该机器鱼摒弃了传统的电机齿轮等机械部件,采用1 mm厚度聚碳酸酯作为柔性支撑结构。同时将SMA丝分为等长的三段进行分别加热致动,该机器鱼总长300 mm(不包含尾鳍),用于模拟不同BCF推进模式下的游动性能。用于驱动的SMA丝直径0.15 mm,在收缩量为6%的情况下获得36°摆动角度,0.5 Hz的摆动频率下获得最高游速为0.1 BL/s。
中国科学技术大学章永华等人于2006年设计了SMA弹簧驱动的仿生机器鱼关节机构[15],如图4(e)所示。通过鱼体侧面的两组合金丝弹簧交替加热的方式,实现尾鳍的绕转轴的摆动,并通过流水直接冷却方式来提高鱼尾摆动频率。SMA弹簧内径0.2 mm,外径2 mm,有效圈数32。通过PWM加热方式,尾鳍的最高摆动频率可达1.5 Hz。
2008年,哈尔滨工业大学王振龙教授课题组研制了基于SMA丝驱动的微型机器鱼[16],如图4(f)所示。将两路直径0.089 mm的SMA丝嵌入柔性单元的蒙皮内,交替加热两侧SMA丝,使得柔性尾鳍来回摆动而实现机器鱼的推进游动。该机器鱼总长146 mm ,质量约30 g,最大摆幅26 mm。在驱动频率2.5 Hz下实现最快游速0.76 BL/s。
3.3 EAP驱动的机器鱼
2003年,日本香川大学的郭书祥等人采用离子导电聚合物膜(Ionic Conducting Polymer Film,ICPF)驱动机器鱼[17],如图5(a)所示。通过改变输出电压的幅值和频率来改变机器鱼的游速,采用两片尺寸为0.2 mm×3 mm×15 mm的ICPF驱动的尾鳍实现推进,两个固定的胸鳍用来提高推进力,其浮力调节模块由尺寸为0.2 mm×4 mm×6 mm 的ICPF驱动。该机器鱼尺寸为45 mm×10 mm×4 mm,前部采用木质结构,总质量0.76 g,在驱动电压2.5 V、驱动频率1 Hz左右的条件下实现最高游速约为0.12 BL/s。

(a) ICPF驱动机器鱼 (b) PPY驱动机器鱼 (c) IPMC驱动微型机器鱼

(d) 仿鲹科机器鱼 (e) IPMC驱动仿生鲫鱼 (f) IPMC驱动仿生海豚
2009年,澳大利亚伍伦贡大学智能高分子研究所利用聚吡咯(Polypyrrole,PPY)导电聚合物研制了新型电子材料肌肉振荡器(NEMO)驱动的机器鱼[18],如图5(b)所示。该机器鱼采用两片尺寸为0.16 mm×3 mm×25 mm的PPY作为致动器。通过无线实时控制,可产生0.557 mN的推进力。该机器鱼的直径20 mm,长125 mm,重16.2 g,在低速游动下可实现1.1 BL的最小转弯半径,摆动频率0.6~0.8 Hz的时候可实现其最高游速0.25 BL/s。
2009年,密西根州立大学电气与计算机工程系研制了IPMC驱动的微型机器鱼[19],如图5(c)所示。采用刚性的水滴形外型结构配合IPMC柔性鱼尾,以及一个惰性的柔性尾鳍组成机器鱼的整体结构。通过对IPMC鱼尾的动力学和流体动力学进行建模仿真,研究其驱动电压和游动速度之间的联系,实验结果与仿真结果高度吻合。机器鱼的总长约为20 cm,最大直径为57 mm,总质量为290 g。驱动电压3.3 V、驱动频率1 Hz的情况下可获得最高的游速为0.1 BL/s。
2009年,东北大学以鲹科模式鱼类为蓝本研制了IPMC致动器驱动的机器鱼[20],如图5(d)所示。该机器鱼采用无线遥控作为远程控制,其前部为硬质壳体,鱼尾部分为IPMC材料,尾鳍为柔性的塑料片。硬壳的尺寸为150 mm×60 mm×40 mm,IPMC的尺寸为50 mm×10 mm,柔性尾鳍尺寸为23 mm×40 mm×25 mm。总质量165.65 g,驱动电压为2.5 V、驱动频率0.27 Hz的情况下达到最高游速0.034 BL/s。
2010年,哈尔滨工程大学在对鲫鱼运动进行分析的基础上研制了IPMC驱动微型机器鱼[21],如图5(e)所示。其尾部和胸鳍均采用IPMC膜片作为驱动器,其中尾部和鱼体的连接部分以及尾鳍都采用PVC塑料用以增加柔性。其总长99 mm,驱动电压3.6 V,驱动频率2 Hz的情况下,微型机器鱼的最快游速为0.24 BL/s,最小转弯半径约0.8 BL。
2012年,北京航空航天大学机器人研究所研制了IPMC驱动的仿生宽吻海豚[22],如图5(f)所示。通过建立基于细长体理论的流体力学模型来研究机器鱼的游动速度和游动效率。该机器鱼(不含尾鳍)尺寸为47.5 mm×14.5 mm×12 mm,重50.05 g。在驱动电压3 V、驱动频率1 Hz,实现最快游速约0.5 BL/s,最大推进力1 mN,最高推进效率约65%。
3.4 PZT驱动的机器鱼
1995年,日本名古屋大学福田敏男等采用PZT作为致动器研制出微型双鳍鱼形机器人[23],如图6(a)所示。采用两块尺寸为2 mm×3 mm×8 mm的PZT分别驱动两个尾鳍,通过机械结构将PZT的变形放大250倍并转化为尾鳍的摆动。两个尾鳍形成一定的交叉角以提高游动性能,每个尾鳍都可以产生向前或者向后的作用力,并由摆动频率决定。该鱼形机器人长32 mm,宽19 mm,在驱动电压150 V、频率168 Hz时有向后的推进力约为2×10-5N;速度0.68 BL/s,频率397 Hz时有向前的推进力约为9.45×10-5N,速度为0.88 BL/s。

(a) 微型双鳍机器鱼 (b) 仿箱鲀科机器鱼 (c) 仿生金枪鱼

(d) MFC驱动的鱼尾 (e) 微型水下机器人 (f) 仿生鱼尾
2005年,加州大学机器人技术与智能机械实验室以箱鲀科鱼类为蓝本研制PZT驱动的 Boxfish 机器鱼[24],如图6(b)所示。采用四连杆机构对PZT压电双晶片工作行程进行放大并驱动一个刚性的摆动尾鳍以提供推进力。该机器鱼还设计有一对独立的胸鳍以控制游动的方向包括上下和左右。第二代的盒子鱼体长12 mm,其中尾鳍长度10 mm,最大摆动角度60°,重量为1 g。在150 V驱动电压下,6 Hz驱动频率平均推力约1 mN,3.9 Hz时的最高游动速度0.35 BL/s。
2010年,韩国建国大学人工肌肉研究中心和智能机器人中心研制了一条机器鱼[25],如图6(c)所示。采用四层新型轻质复合压电致动器(LIPCA)驱动和新型的铰链传动系统。实验研究了其在不同频率下的尾鳍攻角、推进力以及游动速度。该机器鱼尺寸260 mm×120 mm×20 mm,在驱动电压250 V、驱动频率3.9 Hz时得最高的游动速度约0.3 BL/s,可实现最大推进力7.2 mN,最小转弯半径约1.5 BL。
2011年,美国佐治亚理工学院机械工程系研制了粗纤维压电复合材料(Macro Fiber Composite,MCF)制成的仿生鱼尾[26],如图6(d)所示。通过实验研究了其推进性能,该致动器具有功率密度高、弯曲致动、重量轻和一定频率范围内静音等优点。采用重10 g的尾鳍,在驱动频率6 Hz下产生平均推力19 mN,此时功耗约120 mW。
2003年,广东工业大学研制出PZT驱动的微型水下机器人[27],如图6(e)所示。以压电元件作为致动器,采用差动杠杆原理和柔性铰链结合设计,利用三组杠杆机构放大位移,其理论倍数约1 600。采用高压功率运算放大器使得驱动电压幅值为0~150 V可调,输出波形频率0~10 kHz,输出驱动电流60~120 mA。实验证明其可通过改变驱动频率来改变机器人的游速,并实现运动方向的控制。
2012年,南京航空航天大学精密驱动研究所研究了一种复合型的仿生鱼尾[28]方案,如图6(f)所示。采用MFC作为驱动材料和特制的玻璃纤维增强型复合材料作为基板。MFC厚度为0.3 mm,鱼尾整体尺寸为185 mm×40 mm×0.6 mm,其中尾鳍长70 mm,宽65 mm。实验测得峰值电压350 V、频率9 Hz时末端的最大弯曲位移约7 mm,摆动角度约28°。
3.5 不同驱动类型的机器鱼对比
传统电机驱动的仿生机器鱼一般可实现相对较高的游动速度和推进效率,而气动和液压驱动仿生机器鱼的研制相对较少。相比较智能材料驱动的仿生机器鱼,传统驱动方式驱动的仿生机器鱼在体积上要大很多,且由于其驱动控制技术相对较为成熟,因此可实现相对较好的机动性和游动性能。已研制的典型样机中有相当部分已经投入到实际应用。
SMA驱动的仿生机器鱼可实现基本的游动动作,在小型机器鱼上可实现相对较高的游速,但在需要保证续航的情况下,由于能量转化效率较低,难以实现较长时间的续航。目前已有的SMA驱动仿生机器鱼以中小型为主。相比较EAP和PZT驱动的仿生机器鱼,其体积大,并且游速快、驱动力大。
EAP驱动的仿生机器鱼是目前研制较多的一种,由于其结构容易实现,为典型的三段式,由刚性鱼身、EAP尾部和惰性尾鳍组成。采用PWM脉冲控制即可实现鱼尾的摆动,研究者主要试验其在不同驱动电压、驱动频率、不同的尺寸以及新型EAP材料的采用等对机器鱼游动性能的影响。
PZT驱动仿生机器鱼主要是利用机械机构将致动器的微小变形转变成尾鳍的摆动。由于其较高的驱动电压和较小的体积,使其无法内置电源。而其远高于正常的鱼类的摆动频率的致动频率使其难以应用于常规体积的仿生机器鱼,目前仅用在微型泳动机器鱼上。而新型压电纤维材料的研制则提供了较好的解决方案,研究证明其可具备较好的性能表现,但同样较高的驱动电压使得其较难实现自给供电。各种驱动类型的机器鱼对比如表1所示。

表1 不同驱动方式的仿生机器鱼的对比
4 关键技术分析
4.1 推进机理研究
仿生原型推进机理的研究主要采用理论研究、实验研究和数值模拟研究的方法。目前的理论研究和数值模拟的手段均取得了较为显著的研究成果,但未能完整地揭示仿生原型的游动机理以及建立精确的动力学模型,导致仿生样机的自主游动过程中无法实现精确的涡流控制。因此仿生原型的游动速度和游动效率与鱼类原型之间都存在较大的差距,鱼类游动的推进理论和动力学模型为仿生机器鱼研制工作提供重要的理论基础,因此是仿生机器鱼研究的首要内容。
4.2 推进装置和致动器研究
高游速、高效率、高机动性一直都是研究人员追求的目标,也是研制仿生机器鱼的初衷。为实现该目标,采用智能材料作为推进装置的核心部件可以简化其结构、增加其柔性。然而目前的致动器由于对于弹性机制的利用不足,反馈控制技术不够成熟,因此难以实现高游速和高效率的统一。新型致动器材料研制及其控制技术研究以及推进装置结构优化设计是实现仿生样机游动动作更加接近鱼类的重要途径。
4.3 多传感器融合以及控制技术
目前仿生样机的自主游动大多局限在依据动力学模型实现开环控制,无法实现对鱼体周围流场进行感知和利用,也难以实现水下环境的主动识别、判断和做出相应的处理。不但阻碍了仿生样机实现更高的游动速度和游动效率,也难以实现仿生样机的水下的独立自主工作。而通讯上由于难以在水下实现优质高效的信号传输,因此对机器鱼的实时控制不足。多传感器的融合控制技术不但可实现机器鱼的高效高速游动,还可扩展机器鱼的水下应用功能,使得仿生机器鱼具备鱼类的感知,使其能够更好的完成水下工作。
4.4 高效的能源供给
仿生机器鱼的能源供给主要采用自备电池的方式,一般可实现数小时的续航供给,但是限制于体积和重量的大小,难以实现更长时间的持续供给,因此极大地局限了其使用的范围。而伴随着相关技术的发展,通过结构优化和增加其他辅助装置等措施将太阳能、波浪能和潮汐能等新型能源作为机器鱼的能源补给是仿生机器鱼研究的重要研究方向。
5 总结与展望
BCF推进模式的鱼类具有高游速、高效率的特点,使得其成为了理想的仿生原型。传统电机驱动的仿生机器鱼已实现了相对较高的游动效率和可控性,但是由于动作生硬、柔性不足、结构复杂等缺点,限制了其进一步的发展。而智能材料的发展与应用,使得新型仿生机器鱼打破了传统电机驱动仿生机器鱼的限制,并极大地拓展了尾鳍推进模式仿生机器鱼的使用范围,成功实现了微型化、高柔性、低噪声和高效率。国外对智能材料的研制和应用较早,并且研制了众多的典型样机,而国内的研究相对较晚,现阶段还主要以电机为驱动器进行相关的开发研究,仅有少数单位开展了针对智能材料致动器驱动仿生机器鱼的试验性研究。未来智能材料驱动仿生机器鱼将会受到越来越多的关注,也会有越来越多的研究机构和科学工作者投身其中来,实现其更加完善的功能。
[1] 王硕,谭明. 机器鱼[M]. 1版. 北京:北京邮电大学出版社,2006.[2] 王扬威. 仿生墨鱼机器人及其关键技术研究[D]. 哈尔滨:哈尔滨工业大学, 2011.
[3] WEBB P W.Form and function in fish swimming[J].Scientific American,1984, 251(1): 72-79.
[4] MICHAEL S,LANE D M,DAVIES J B C.Review of fish swimming modes for aquatic locomotion [J] .Journal of Oceanic Engineering, 1999, 24 (2): 237-252.
[5] TECHET A H,HOVER F S,TRIANTAFYLLOU M S.Separation and turbulence control in biomimetic flows[J].Flow,Turbulence and Combustion,2003,71(4):105-118.
[6] 夏丹.鲔科仿生原型自主游动机理的研究[D]. 哈尔滨: 哈尔滨工业大学, 2010.
[7] IU J,HU H.Biological inspiration: from carangiform fish to multi-joint robotic fish[J].Journal of Bionic Engineering, 2010, 7(1): 35-48.
[8] STEFANINI C,OROFINO S,MANFREDI L,et al.A novel autonomous, bioinspired swimming robot developed by neuroscientists and bioengineers[J].Bioinspiration & biomimetics, 2012, 7(2): 1-8.
[9] MARCHESE A D,ONAL C D,RUS D.Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators[J].Soft Robotics,2014,1(1):75-87.
[10] LIANG J,WANG T,WEN L.Development of a two~joint robotic fish for real-world exploration[J].Journal of Field Robotics,2011,28(1):70-79.
[11] AYERS J,WILBUR C,OLCOTT C.Lamprey robots[C]//Proceedings of the International Symposium on Aqua Biomechanisms,Hiratsuka,Japan,2000:1-6.
[12] SULEMAN A,CRAWFORD C.Design and testing of a biomimetic tuna using shape memory alloy induced propulsion[J].Computers & Structures, 2008, 86(3): 491-499.
[13] SUMOTO H,YAMAGUCHI S.A study on a control method of artificial muscle using segmented binary control for an up-scaled fish type robot[C]//The Twenty-first International Offshore and Polar Engineering Conference,International Society of Offshore and Polar Engineers, 2011:223-229.
[14] ROSSI C,COLORODO J,CORAL W,et al.Bending continuous structures with SMAs: a novel robotic fish design[J]. Bioinspiration & biomimetics, 2011, 6(4):1-15.
[15] 章永华,马记,何建慧,等.基于人工肌肉的仿生机器鱼关节机构设计与力学分析[J]. 机器人, 2006,28(1):40~44.
[16] WANG Z,HANG G,WANG Y,et al.Embedded SMA wire actuated biomimetic fin:a module for biomimetic underwater propulsion[J].Smart Materials and Structures,2008,17(2):1-15.
[17] GUO S,FUKUDA T,ASAKA K.A new type of fish-like underwater microrobot[J].IEEE/ASME Transactions on Mechatronics, 2003, 8(1): 136-141.
[18] MCGOVERN S,ALICI G,TRUONG V T,et al.Finding NEMO (novel electromaterial muscle oscillator): a polypyrrole powered robotic fish with real-time wireless speed and directional control[J]. Smart Materials and Structures, 2009, 18(9): 1-10.
[19] CHEN Z,SHATARA S,TAN X.Modeling of biomimetic robotic fish propelled by an ionic polymer-metal composite caudal fin[J].IEEE/ASME Transactions on Mechatronics,2010,15(3):448-459.
[20] XU S,LIU B,LINA H.A small remote operated robotic fish actuated by IPMC[C]//2008 IEEE International Conference on Robotics and Biomimetics. 2009: 1152-1156.
[21] 苏玉东,叶秀芬,郭书祥.基于IPMC驱动的自主微型机器鱼[J]. 机器人, 2010, 32(2): 262-270.
[22] SHEN Q,WANG T,LIANG J,et al.Hydrodynamic performance of a biomimetic robotic swimmer actuated by ionic polymer-metal composite[J]. Smart Materials and Structures, 2013, 22(7):1-13.
[23] FUKUDA T,KAWAMOTO A,ARAI F,et al.Steering mechanism of underwater micro mobile robot[C]//1995 IEEE International Conference on Robotics and Automation,1995,1:363-368.
[24] DENG X,AVADHANULA S.Biomimetic micro underwater vehicle with oscillating fin propulsion: system design and force measurement[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation,2005:3312-3317.
[25] NGUYEN Q S,HEO S,PARK H C,et al. Performance evaluation of an improved fish robot actuated by piezoceramic actuators[J]. Smart Materials and Structures, 2010, 19(3):1-8.
[26] ERTURK A,DELPORTE G.Underwater thrust and power generation using flexible piezoelectric composites: an experimental investigation toward self-powered swimmer-sensor platforms[J]. Smart materials and Structures, 2011, 20(12):111.
[27] 谭湘强,钟映春,杨宜民.液体中运动微机器人的研制[J].现代制造工程,2003,(4):7-9.
[28] 官源林,李华峰,杨熙鑫.基于 MFC 的复合型仿生鱼尾的振动性能[J]. 振动、测试与诊断, 2013,(2):403-408.
Research Status and Development Trend of Bionic Robot Fish with BCF Propulsion Model
WANGYang-wei,YUkai,YANYong-cheng
(Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
BCF propulsion model is the swimming mode adopted by the most nature fishes. Compared to MPF propulsion model, it has great advantage of high speed, high swimming efficiency and excellent acceleration performance. Researchers have focused on the study of BCF propulsion mode to realize high speed and efficient of bionic robot fish. Several common actuators used in bionic robot fish and the research status of BCF propulsion mode were introduced. And the characteristics and performance of the bionic robot fish based on different actuators was analyzed and the key technologies and development trends of BCF propulsion model was discussed.
bionic robot fish; BCF propulsion model; actuator
2015-04-20
江苏省自然科学基金项目(BK20130796);南京航空航天大学研究生创新基地(实验室)开放基金项目(KFJJ201437);高校基本科研业务费专项基金项目
TM359.9
A
1004-7018(2016)01-0075-06
王扬威(1980-),男,讲师,研究方向为仿生机器人和机电控制及自动化。
猜你喜欢
哈尔滨轴承(2021年1期)2021-07-21
南方农业学报(2020年7期)2020-11-09
小学科学(2020年11期)2020-03-04
电子制作(2019年7期)2019-04-25
机械工程师(2018年1期)2018-12-29
无人机(2017年10期)2017-07-06
微特电机(2016年8期)2016-11-26
广西电力(2016年5期)2016-07-10
天津诗人(2014年4期)2014-11-14
空气动力学学报(2014年5期)2014-04-30