宇航双绕组步进电动机感应电流机理及措施研究
2016-12-06 01:34蒋范明屈传坤周建华
微特电机 2016年1期
蒋范明,屈传坤,周建华
(1.上海市空间飞行器机构重点实验室,上海 201109;2.上海宇航系统工程研究所,上海 201109)
宇航双绕组步进电动机感应电流机理及措施研究
蒋范明1,2,屈传坤2,周建华2
(1.上海市空间飞行器机构重点实验室,上海 201109;2.上海宇航系统工程研究所,上海 201109)
针对宇航双绕组步进电动机及其驱动线路主份工作时,在备份线路中产生感应电流的异常现象,从双绕组步进电动机构型、驱动线路设计方面分析了备份感应电流产生的机理,并提出抑制感应电流的隔离设计措施,为相关的航宇型号驱动控制产品研制提供参考。
宇航;主备绕组;步进电动机;感应电流
0 引 言
宇航运动机构多采用步进电动机作为力矩执行单元,以利用其开环控制、无累计误差、断电自锁等优点。同时,为了保证运动机构及驱动线路的可靠性,满足相应航天规范,避免出现单点故障模式,空间运动机构通常采用双绕组步进电动机,配合主、备驱动线路[1]。针对型号研制过程中出现的备绕组及驱动线路感应电流,使主份线路工作时电流异常增大,进而影响机构运动稳定性的问题,分析了引起感应电流的机理,并提出了抑制感应电流的设计措施,为后续工程研制提供参考。
1 双绕组步进电动机驱动线路工作原理
宇航运动机构,如太阳电池阵的对日定向控制、星载雷达天线的指向控制,多采用双绕组步进电动机作为执行单元,主、备电机绕组及驱动线路互为冷备份,以提高产品可靠性[2]。通常情况下,运动机构在轨后进入主份工作模式,当主份出现工作异常时,通过地面遥控进行切备份,工作原理如图1所示。
混合式步进电动机从结构上看,它的定转子上开有很多齿槽,类似于反应式步进电动机;磁路内含有永久磁钢,类似于永磁式步进电动机。宇航混合式步进电动机多采用两相结构,既可简化驱动电路,又可减少电机功率线的重量。双绕组混合式步进电动机如图2所示,电机定子铁心上均匀分布几个大极,每大极上有若干小齿,铁心槽内嵌有主、备绕组;转子铁心外圆均匀分布若干小齿,磁钢为轴向充磁,磁钢两端的两段转子铁心相互错开半个齿距。当定子上各相绕组按一定规律通以驱动脉冲电流时,就会在气隙中产生脉振磁场。转子磁钢产生的磁场与定子绕组产生的脉振磁场叠加,形成旋转的磁场并产生转矩,从而驱动转子按脉冲规律一步一步的转动[3]。
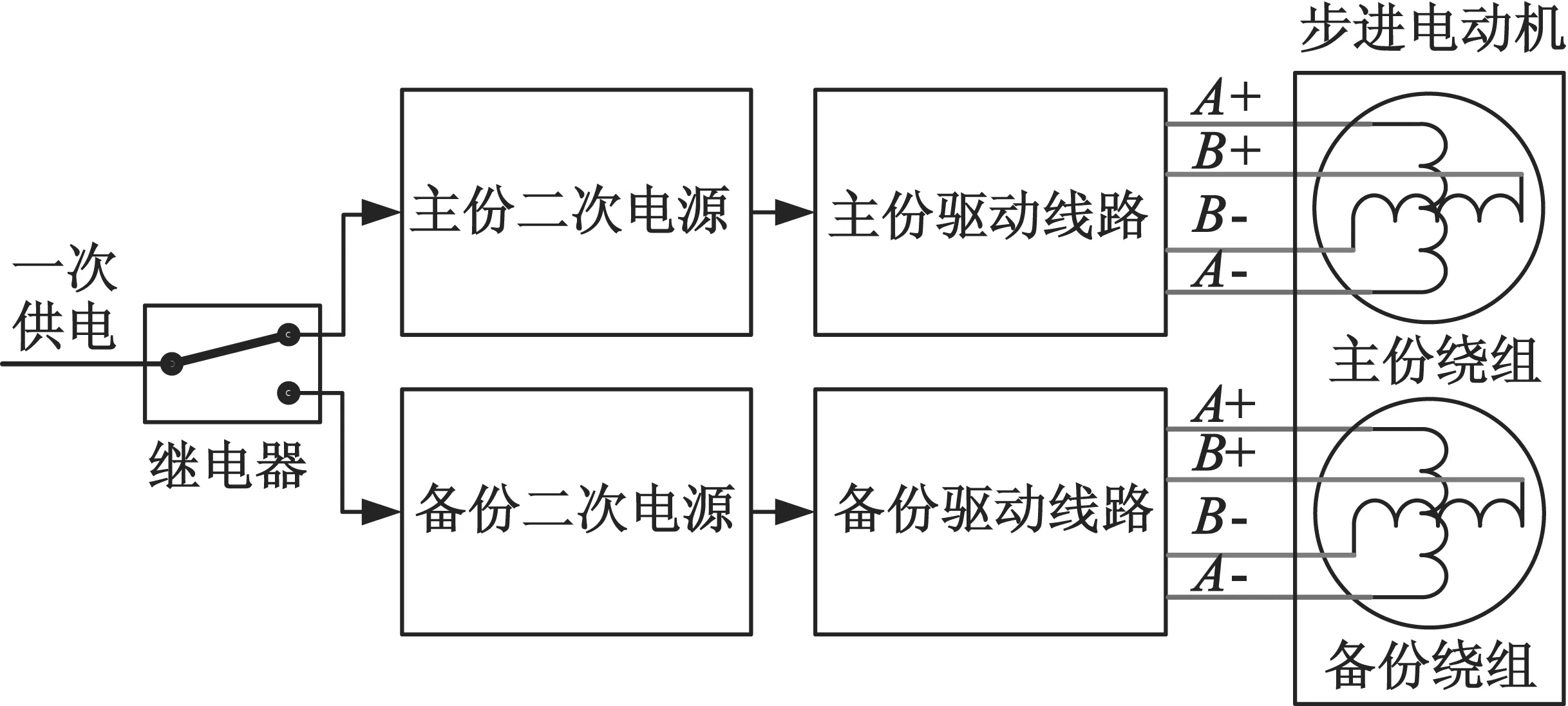
图1 航天型号主备份切换原理
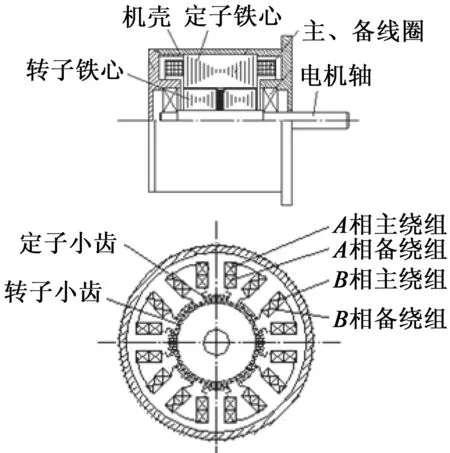
图2 双绕组混合式步进电动机结构图
2 主备绕组感应电流机理分析
为了实现步进电动机平稳运行的目的,目前宇航运动机构步进电动机驱动线路设计中广泛采用开关型细分驱动方案,开关型电路由于末级MOS管工作在开关状态,相比早期基于达林顿管的放大型细分驱动电路,能大大降低驱动线路的热耗。本文以常用的IR2110+MOSFET驱动电路为例进行分析。
对于双绕组混合式步进电动机及其驱动线路,正常工作时,主份线路工作,备份线路不加电。当主份线路工作时,备份绕组定子线圈中的磁链是主绕组对它的互感磁链以及转子永磁磁通对它的产生的磁链之和。由于双绕组电机生产工艺中主备线圈缠绕在同一定子铁心上,因此主绕组的漏磁通很小,即主绕组对备绕组的互感磁通近似等于主绕组产生的自感磁通,如图3所示。
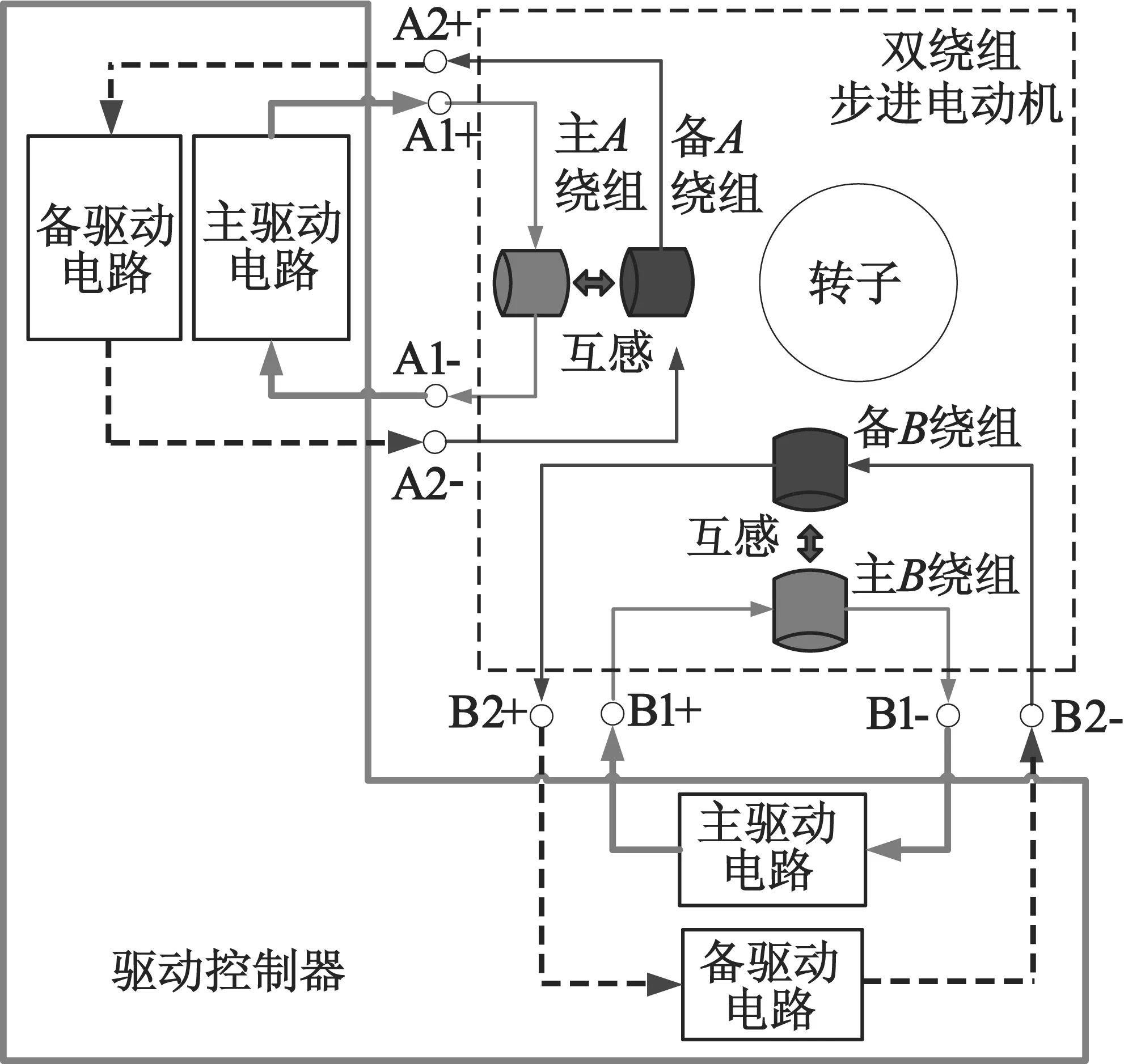
图3 双绕组混合式步进电动机感应电动势示意图
宇航运动机构步进电动机及其驱动线路通常采用冷冗余的形式,正常工作时,主份驱动线路及主电机绕组工作,备份不参加工作。当主绕组A相通电时,在备绕组A相中会产生感应电动势。由于感应电动势的存在,与H桥MOS管自有的体二极管形成续流回路,如图4所示,造成备份供电及驱动线路上产生残余电压,产生类似于备份线路供电的现象。此工作状态下,对主驱动线路而言,备绕组成为发电机并带有负载(备份驱动线路),因此驱动单机工作电流增大,电机输出的驱动力矩下降。
在实验室中,对某宇航型号双绕组混合式步进电动机(带机构负载)及其驱动线路进行实测,现象如下:
a) 当主、备份驱动板同时安装在驱动器内,通过主份驱动线路控制电机转速达到2 r/s时,系统工作电流约为2 A;拔掉备份驱动板,同样转速下,系统工作电流降为1 A左右。
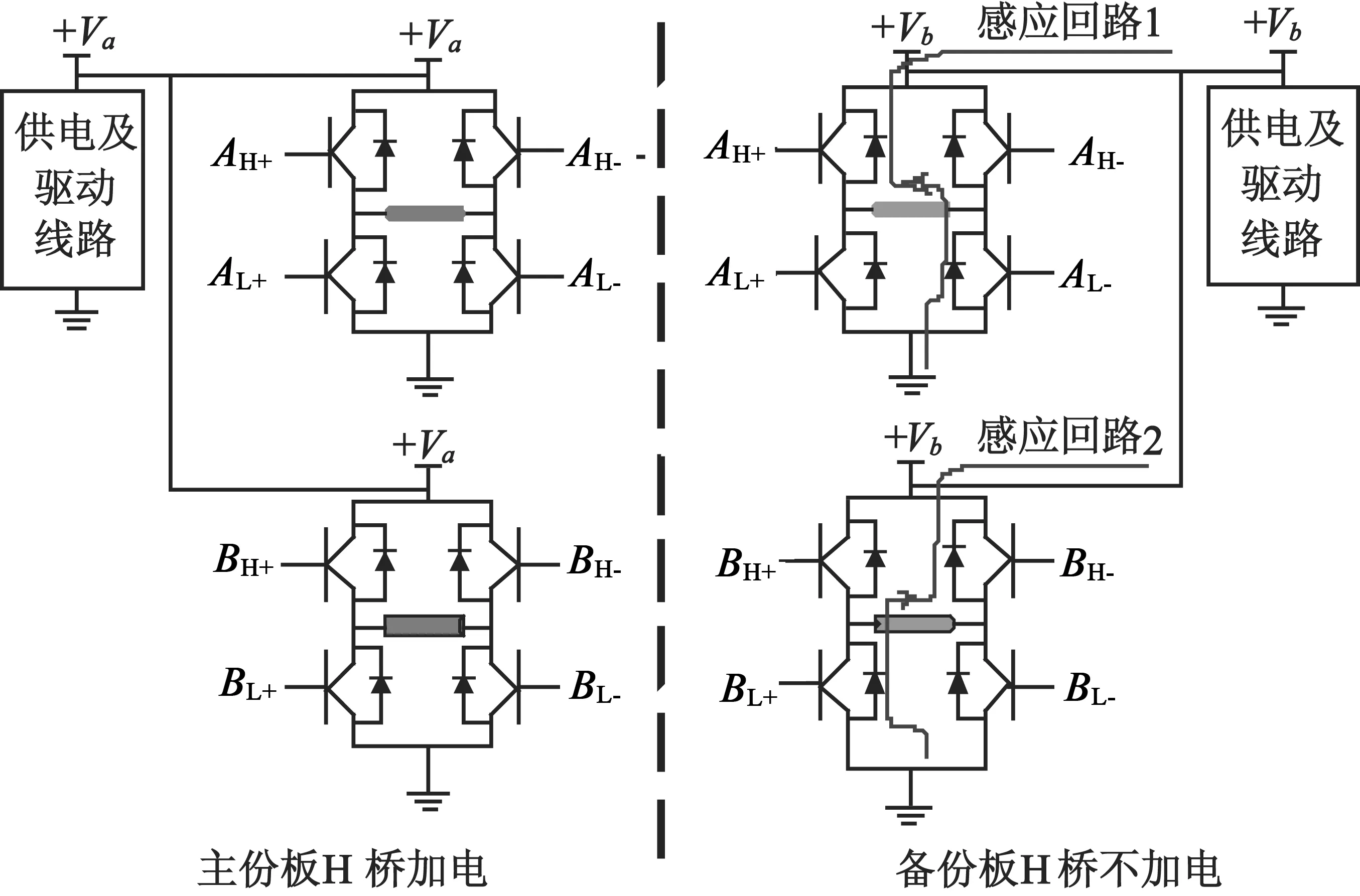
图4 感应电流回路
b) 当主、备份驱动板同时安装在驱动器内,通过主份驱动线路控制电机转速从1 (°)/s增加到200 (°)/s时,电机备份绕组感应电流随着速度的增加从160 mA增大到500 mA。
可见,主份驱动线路及其绕组工作状态下,备份电机绕组及其驱动线路中构成了感应电流回路,且感应电流大小与主动驱动线路的电机转速成一定正比关系。
3 感应电流抑制措施研究
双绕组步进电动机主、备绕组感应电流产生的机理是由于主电机绕组工作时,在备绕组中产生的互感磁链引起感应电动势,由于备绕组内部的潜通路,在备电机绕组及其驱动线路中形成感应电流。此时相当于备电机绕组处于发电机的工作模式,成为主绕组的负载,最终导致系统工作电流异常增大。
主绕组工作时,对备绕组的潜在通路进行隔离,是消除双绕组步进电动机主、备绕组感应电流现象的主要原则,具体措施包含如下两种。
1) 措施一:采用磁保持继电器对电机绕组进行隔离,即主绕组工作时,通过继电器切断备绕组与其驱动线路之间的通路。电路示意如图5所示。
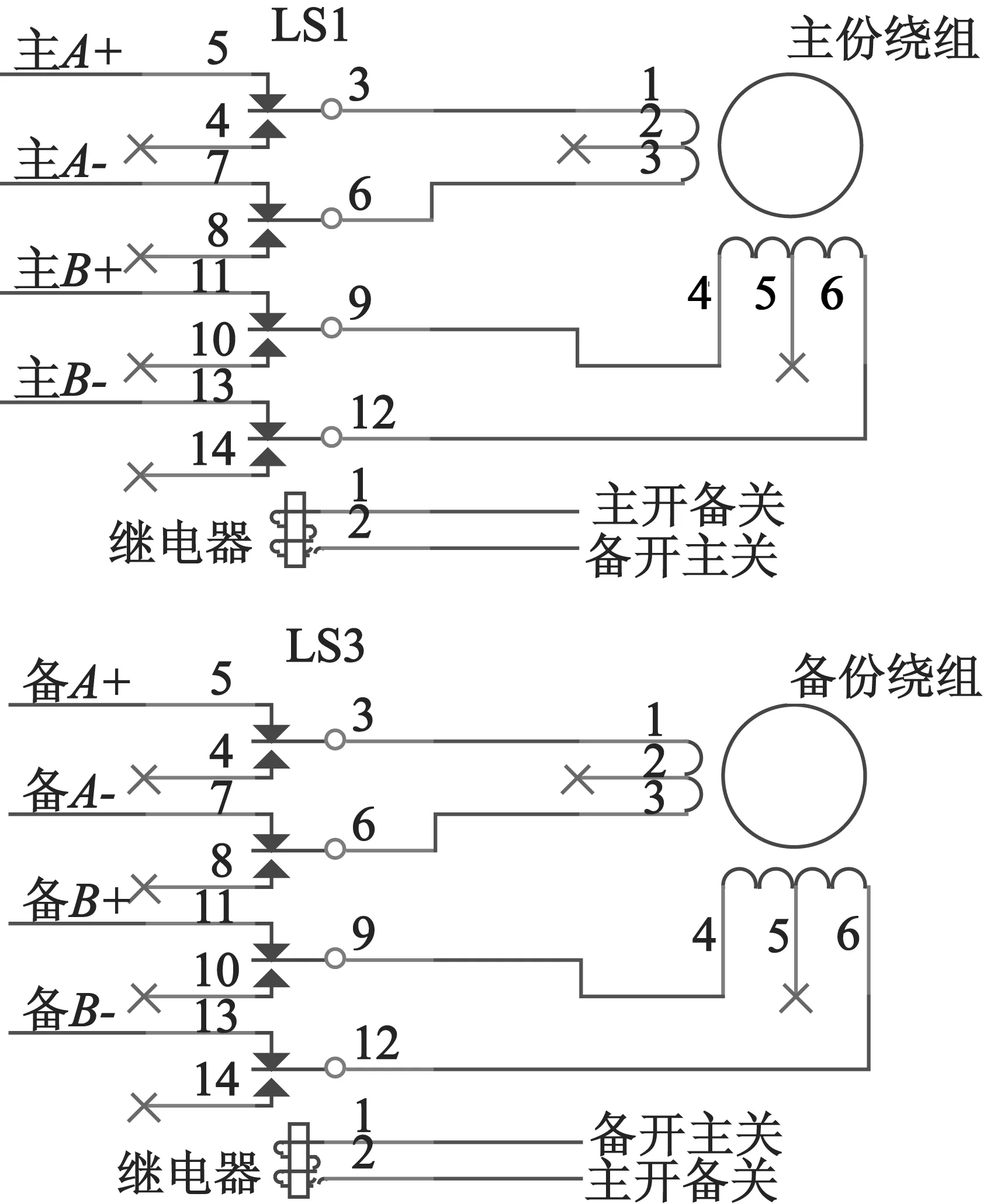
图5 磁保持继电器隔离示意
此方法能从物理上对潜在通路进行隔断,但需要额外增加2个继电器及相应外围电路,且从宇航型号FMEA(故障模式影响分析)角度[4],在电机控制系统中增加了继电器单点,因此设计时谨慎使用。
2)措施二:在电机驱动线路功率电源端串入隔离二极管,确保主绕组工作时,备绕组的潜在通路被二极管隔断。电路示意如图6所示。
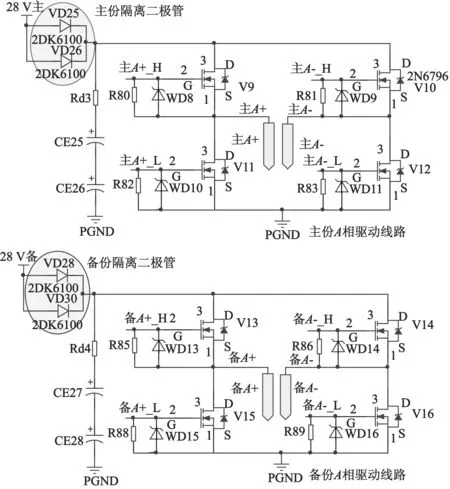
图6 二极管隔离示意图
此方法相比方法一更为简单,宇航型号中为了防止故障蔓延,确保可靠性,对隔离二极管的选型需要注意以下两点:
a) 由于主、备绕组功率供电端都串入隔离二极管,二极管的功率及正向电流需要降额设计;同时,流经二极管的驱动电流产生的热属于对二极管破坏性最强的应力,因此二极管的热设计需要谨慎处理。
b) 主绕组工作时,在备绕组中的感应电动势随电机转速增加而增大,因此二极管的反向耐压值需结合电机转速进行选型考虑。
实验室中,对某款宇航级双绕组步进电动机及其驱动线路进行测试,电机轴转速设定为700 (°)/s,分别测试加隔离措施(二极管隔离)和未加隔离措施的工况下系统工作电流,测试结果如表1所示。

表1 感应电流验证实验
4 结 语
为了防止单点故障,宇航运动机构通常采用双绕组步进电动机作为驱动单元。对于双绕组步进电动机及其主、备驱动线路,其中,主份工作时,电机主绕组定子铁心上磁场在备电机绕组中产生感应电动势,经过备驱动线路中的潜在通路,形成感应电流。感应电流回路的存在使备电机绕组处于发电机的工作模式,成为主绕组的负载,最终导致系统工作电流异常增大,影响机构运动的稳定性。通过上述机理分析,提出磁保持继电器或隔离二极管对主、备绕组的潜在通路进行隔离的措施,可以消除双绕组步进电动机主、备绕组感应电流现象。实验室中,通过对加二极管隔离措施前后电机驱动线路进行测试,验证了感应电流机理分析的正确性及抑制措施的有效性。
[1] 张洪岩,李雨.轴向分相混合式永磁步进电动机自定位力矩设计[J].微特电机,2012,40(1):22-23.
[2] 冯智海.航空航天用稀土永磁直流电机可靠性研究[D].西安:西北工业大学,2005:16-24.
[3] 刘宝廷,程树康.步进电动机及其驱动控制系统[M].哈尔滨:哈尔滨工业大学出版社,1997:11-15.
[4] 康锐,石荣德.FMECA技术及其应用[M].北京:国防工业出版社,2006:22-37.
Theoretical Analysis and Improvement Design of Induced Current in Dual-Winding Stepper Motor for Aerospace Applications
JIANGFan-ming1,2,QUChuan-kun2,ZHOUJian-hua2
(1.Shanghai Key Laboratory of Spacecraft Mechanism,Shanghai 201109,China;2.Aerospace System Engineering Shanghai,Shanghai 201109,China )
Double winding stepper motor was used for aerospace applications. For the double winding stepper motor and it's corresponding drive circuit, induced current may appear in backup drive circuit when the main motor and it's drive circuit are running. The mechanism of induced current was analyzed and an improved design for the isolation of induced current was presented. This can provide reference for the related aerospace motor drive circuit design.
aerospace; dual-winding; stepper motor; induced current
2015-07-10
TM383.6
A
1004-7018(2016)01-0005-02
蒋范明(1983-),博士,工程师,研究方向为机构运动控制。
猜你喜欢
数理化解题研究·高中版(2022年4期)2022-04-28
作文小学高年级(2021年11期)2021-12-22
空间科学学报(2021年4期)2021-08-30
电子制作(2016年19期)2016-08-24
通信电源技术(2016年1期)2016-04-16
中学科技(2015年10期)2016-01-06
小主人报(2015年4期)2015-09-14
小主人报(2015年2期)2015-03-01
小主人报(2015年3期)2015-02-28
中国舰船研究(2015年2期)2015-02-10