水下蛇形机器人机构设计及蜿蜒游动研究①
2016-12-05 08:54谢亚飞卢振利徐惠钢波罗瓦茨布朗尼斯拉夫
高技术通讯 2016年6期
谢亚飞 卢振利 徐惠钢 波罗瓦茨·布朗尼斯拉夫 李 斌*
(*中国矿业大学信息与电气工程学院 徐州 221116) (**常熟理工学院电气与自动化工程学院 常熟 215500) (***中国科学院沈阳自动化研究所 机器人学国家重点实验室 沈阳 110014) (****诺维萨德大学技术科学学院 诺维萨德 21000, 塞尔维亚)
水下蛇形机器人机构设计及蜿蜒游动研究①
谢亚飞②***卢振利③*****徐惠钢**波罗瓦茨·布朗尼斯拉夫****李 斌***
(*中国矿业大学信息与电气工程学院 徐州 221116) (**常熟理工学院电气与自动化工程学院 常熟 215500) (***中国科学院沈阳自动化研究所 机器人学国家重点实验室 沈阳 110014) (****诺维萨德大学技术科学学院 诺维萨德 21000, 塞尔维亚)
仿效自然界蛇在水中的蜿蜒游动,设计了适于水中蜿蜒游动的蛇形机器人样机,并运用蛇形曲线对其蜿蜒游动进行实验研究。首先对蛇形机器人在水中的受力情形进行了分析;其次通过蛇形曲线控制蛇形机器人实现蜿蜒运动,并用依据样机搭建的动力学模型对蛇形机器人蜿蜒游动性能进行了仿真研究;最终对比分析了蛇形机器人在水中蜿蜒游动性能实验与动力学仿真中蜿蜒游动性能试验,验证了建模的必要性,为蛇形机器人的实用化提供了理论技术依据。
蛇形机器人, 蜿蜒游动, 蛇形曲线, 动力学仿真
0 引 言
与传统的轮式和腿式机器人相比,蛇形机器人具有独特的运动方式和身体结构,它能够通过身体与接触环境摩擦产生前进的动力[1,2],而水下运动的蛇形机器人相比其它水中机器人就更具优势。水下蛇形机器人是一种高冗余度的移动机器人,它的自由度多于确定空间位置和姿态所需的自由度,其柔韧的蛇体可以更加灵活地适应各种复杂的水下环境,适应传统的海底矿藏调查、输油管道检查、钻井平台水下结构检修、电缆检查水下机器人难以到达或勘探的区域[3]。因此,水下蛇形机器人的发展将成为仿生机器人领域一个新的研究热点,对于未来的海洋探索具有广阔的应用前景。
蜿蜒运动是最能典型地体现蛇身体柔韧、运动有节律的步态[4-7]。对蛇蜿蜒运动性能的研究可为蛇在水中高效、高机动地游动提供理论依据及技术储备。本研究设计了一种能在水中具有二维运动能力的蛇形机器人,应用蛇形曲线使其产生蜿蜒游动,而且通过动力学仿真软件建立动力学仿真模型,验证和分析了该蛇形机器人的蜿蜒游动性能。
1 水下蛇形机器人设计
1.1 机构设计
为了研究蛇形机器人在水中的蜿蜒游动性能,需要研究其机构的设计以及其能否保持在水中运动步态的有效性、稳定性。这是研究其蜿蜒游动的前提。目前国内沈阳自动化研究所和国外日本东京工业大学对水下蛇形机器人进行了研究并取得了显著的成果[8-10],设计的样机如图1所示。考虑了蛇形机器人在水中的漂浮情形,本研究采用16个轻质防水小舵机(如图2所示)串联构成蛇形机器人基本机构,并添加配重泡沫块使蛇形机器人能恰好漂浮于水面。同时,在水下蛇形机器人设计搭建的过程中,机构关键部位的防水性起到至关重要的作用,一旦漏水有可能导致整个电控系统的瘫痪。设计过程中采用热熔胶对舵机及控制器等模块进行防水密封保护。蛇形机器人机构如图3所示。

图1 国内外水下蛇形机器人

图2 轻质舵机

图3 蛇形机器人
1.2 控制系统设计
任何机器人最核心的部分都是其控制系统,机器人运动性能的好坏取决于其控制单元的选型与设计,蛇形机器人亦不例外。本文设计的水下蛇形机器人采用Arduino控制器、24路舵机控制板和蓝牙通讯模块构成控制通讯架构。其中Arduino控制器是主控单元作为上位机,舵机控制板作为下位机,控制系统各单元如图4所示。

图4 控制系统单元
控制系统整体框架如图5所示。

图5 控制系统架构
系统框架部分电路如图6所示。图6中,Arduino控制器中的TXD和RXD一对端子是串口端子,分别用以数据的传输与接收,实现上下位机无线通讯可用蓝牙模块替代导线连接。舵机控制器电路中,VSS为板载供电电压,VS为舵机供电电压,GND为接地,S1,S2,…,S16为舵机信号端口,发送脉宽调制(PWM)信号控制舵机转动,M1,M2,…,M16为16个舵机。

图6 系统部分电路图
2 动力学模型仿真
2.1 水中受力情形
蛇形机器人在水中受力情形主要分为两类:水静力和水动力[11,12]。水静力包括蛇形机器人自身的重力和与浸没在水中部分体积成正比的浮力。水动力由机器人和流体的运动状态和物理属性决定,主要包括附加质量力和粘滞阻力。附加质量力是蛇形机器人关节在水中摆动,水对其产生的反作用力;粘滞阻力则与模块形状、表面材质和与水的相对速度有关。
2.1.1 蛇形机器人所受重力
蛇形机器人所受重力为
G=mg
(1)
式中,m是蛇形机器人质量,g是重力加速度。
2.1.2 蛇形机器人所受浮力
蛇形机器人所受浮力为
F浮=-ρgV
(2)
式中,ρ是水的密度,g是重力加速度,V是蛇形机器人浸没在水中的体积。
2.1.3 蛇形机器人所受附加质量力
蛇形机器人所受附加质量力为
Fa=-ρVCaa
(3)
式中,Ca是附加质量系数,a是角加速度。
2.1.4 蛇形机器人所受粘滞阻力
蛇形机器人所受粘滞阻力
(4)
式中,V是蛇形机器人相对于水的速度,S是蛇形机器人在水中有效的截面积,Cd是粘滞系数,其取决于流体状态、表面粗糙度。
2.2 动力学仿真建模
在Windows操作系统、酷睿i5处理器、CPU内存为2G的操作环境下,用V-REP软件ODE动力学引擎进行建模,仿真环境界面如图7所示。参照蛇形机器人样机参数,搭建与样机基本一致的动力学仿真模型进行蜿蜒游动的研究。动力学仿真模型中用Cuboid(立方体)设计为舵机模型,Joint(关节)为舵机转轴模型。蛇形机器人单个舵机模块质量为9g,最大扭矩为1.6kg·cm,动力学仿真软件中则相应地设置为0.009kg(见图8)和0.157N·m(见图9)。

图7 仿真操作界面

图8 刚体动力学属性

图9 关节动力学属性
蜿蜒游动的实验都是在静水中执行的,尽可能地模拟真实的环境,在水环境的脚本程序中设置水的流速和波幅为0,蛇形机器人动力学模型所受浮力和阻力通过simAddForce指令添加,其中添加的浮力值根据蛇形机器人浸没在水中的体积计算,阻力值依据设置的粘滞系数和蛇形机器人相对于水的速度而获得。阻力系数设置为-20,因为阻力相对于机器人运动方向是相反的,所以设置为负值。蛇形机器人动力学仿真模型如图10所示。
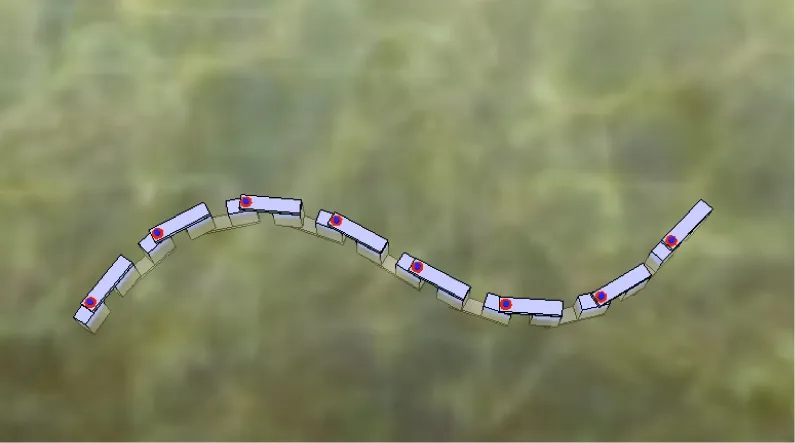
图10 蛇形机器人仿真模型
3 蜿蜒游动性能研究
蛇形机器人的蜿蜒游动是利用蛇形曲线方程在电源供给不同舵机按照一定的相位差而拟合成的转动,呈现出的运动效果类似于生物蛇的蜿蜒运动,模块与水之间的纵横向摩擦产生了向前的推动游动。
3.1 蛇形曲线
本文研究的蜿蜒游动是应用Hirose教授提出的蛇形曲线产生的。蛇形曲线关节转角公式为
(5)
式中,rad[i]为关节转动角度,单位为弧度;i为关节序号;α为蛇形曲线起始弯角;kn为蛇形机器人体内形成波个数;s为曲线轴线方向位移;N为模块节数;L为蛇形机器人总长度。
3.2 蛇形曲线参数对蜿蜒游动性能的影响
影响蛇形机器人蜿蜒游动性能的主要参数有:蛇形曲线的起始弯角α,体内形成波个数kn及单位时间内曲线轴线方向位移变化率Δs。这三个参数选取的好坏将直接影响蜿蜒游动的性能。实验中从不同参数对蛇形机器人游动速率的影响来判断其游动性能。平均速率公式为
(6)
式中,S为固定游动距离,由于实验水环境长度有限,实验距离选取为50cm;t为游动固定距离所需时间,仿真中选取的步长为50ms。
3.2.1 起始弯角α的变化对蜿蜒游动的影响
在参数kn和Δs不变的情况下,变化α观其对蛇形机器人蜿蜒游动步态的影响。经实验数据分析,绘制α与游动速率的关系曲线如图11所示。

图11 α与游动速率关系
图11中实物实验和仿真实验均呈现了在合理范围内随着α的逐渐增大,蛇形机器人蜿蜒游动速率先增大后减小态势。动力学仿真模型相对精确,基本上与实体样机运动相吻合。取α为0.8时,蛇形机器人在水中运动过程如图12所示,相应的仿真运动如图13所示。

图12 α=0.8游动过程
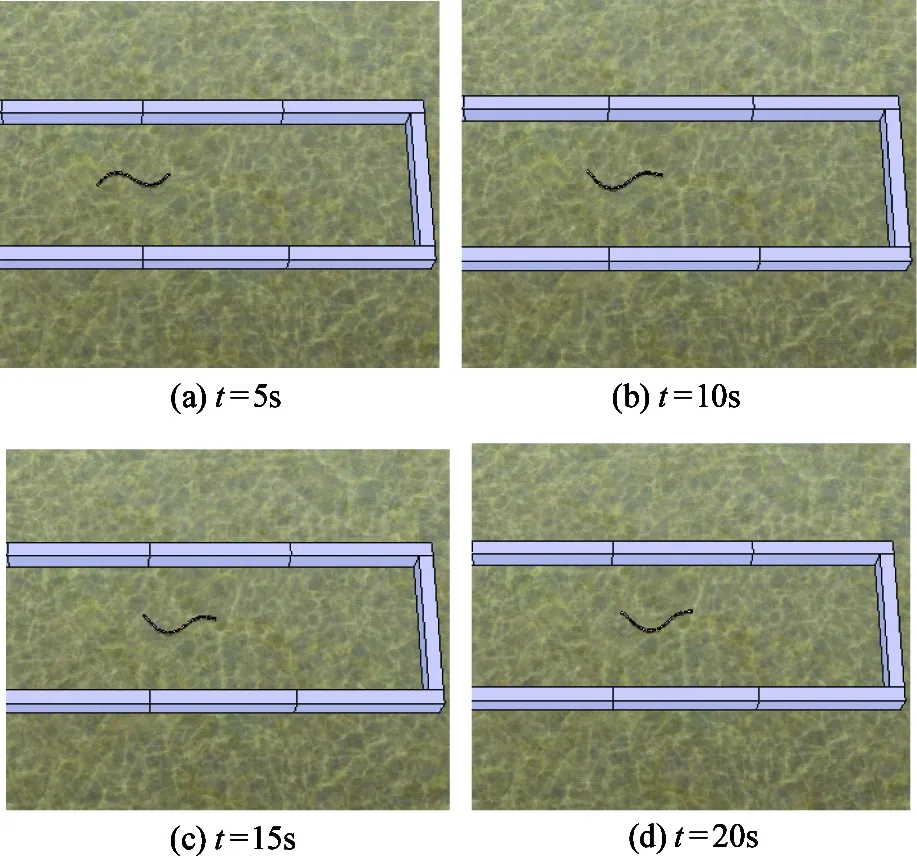
图13 α=0.8仿真游动过程
3.2.2Δs的变化对蜿蜒游动的影响
在其它参数不变的前提下,变化Δs研究其对蜿蜒游动的影响。Δs与游动速率关系如图14所示。
图14表明:单位时间轴线方向位移变化率Δs增大的同时,蛇形机器人蜿蜒游动的速率也随之增大且变化较明显。变化率Δs为4时,蛇形机器人在水中的蜿蜒游动状态如图15所示,相应的仿真运动如图16所示。

图14 Δs与游动速率关系

图15 Δs=4时游动状态
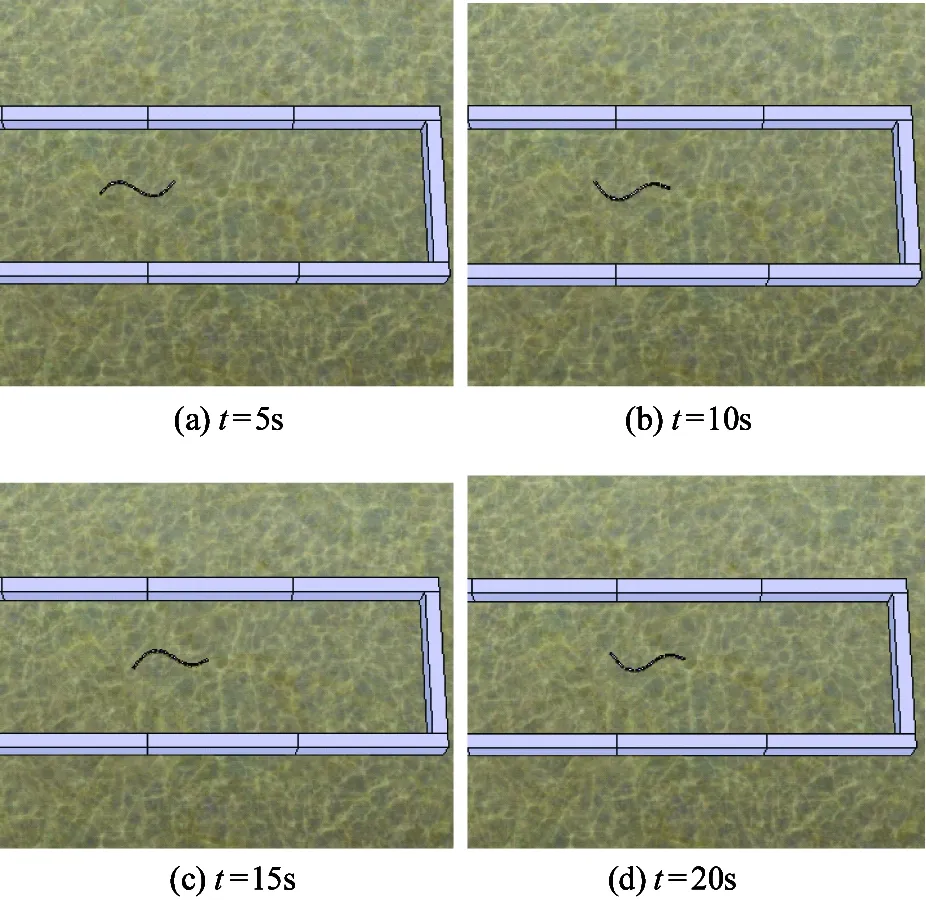
图16 Δs=4时仿真游动状态
3.2.3kn的变化对蜿蜒游动的影响
在机构允许的条件下,改变蛇形曲线公式中kn的值,蛇形机器人蜿蜒游动时体内S波的个数则发生改变。不同kn的值对蜿蜒游动速率也产生不同的影响,两者之间的关系如图17所示。

图17 kn与游动速率关系
从图17中可知,伴随体内S波个数kn的逐渐增大,蛇形机器人的蜿蜒游动速率逐渐减小。当kn为0.5这种特殊情形时,蛇形机器人姿态为一个半弧形,在水中平衡稳定性较差,左右摆动无法前进。kn取2时,蛇形机器人蜿蜒游动过程如图18所示,相应的仿真运动过程如图19所示。

图18 kn=2时,蜿蜒游动状态

图19 kn=2时,仿真蜿蜒游动状态
4 结 论
本文通过对机构和控制系统的设计搭建了适于水中运动的蛇形机器人,运用蛇形曲线对蜿蜒游动进行了实验与分析,并通过动力学仿真建模验证了蜿蜒游动性能,分别得出了蛇形曲线公式中Δs、α、kn三个参数与蛇形机器人蜿蜒游动速率之间的关系,为研究水下蛇形机器人蜿蜒游动提供了实验参考。动力学仿真中,由于现实水环境的复杂性,仿真实验建模仍有欠缺,故与实际环境有偏差,这在后续研究中有待完善。
[1] 苏中, 张双彪, 李兴城. 蛇形机器人的研究与发展综述. 中国机械工程, 2015,26(3): 414-425
[2] 吕恬生, 王翔宇. 蛇的爬行运动实验和运动中蛇体曲线的动态模拟. 上海交通大学学报, 1998,(1):131-135
[3] 彭学伦. 水下机器人的研究现状与发展趋势. 机器人技术与应用, 2004,(4):43-47
[4] 陈丽, 王越超, 李斌. 蛇形机器人研究现况与进展. 机器人, 2002,24(6):559-563
[5] 刘华,颜国正,丁国清.仿蛇变体机器人运动机理研究. 机器人,2002,24(2):154-158
[6] 黄恒, 颜国正. 蛇形机器人的运动策略. 电机与控制学报, 2002, 6(3): 249-251
[7] 崔显世,颜国正,陈寅等. 一个微小型仿蛇机器人样机的研究. 机器人,1999,21(2):156-160
[8] Kohl A M, Pettersen K Y, Kelasidi E, et al. Planar path following of underwater snake robots in the presence of ocean currents.IEEERobotics&AutomationLetters, 2016, 1(1): 383-390
[9] 郁树梅, 马书根, 李斌等. 水陆两栖蛇形机器人的上浮和下潜步态研究. 仪器仪表学报, 2011, 32(S1)
[10] 郁树梅, 王明辉, 马书根等. 水陆两栖蛇形机器人的研制及其陆地和水下步态. 机械工程学报, 2012, 48(9):18-25
[11] 李立, 王明辉, 李斌等. 蛇形机器人水下3D运动建模与仿真. 机器人, 2015,(3):336-342
[12] Lv Y H, Li L, Wang M H, et al. Simulation study on serpentine locomotion of underwater snake-like robot.InternationalJournalofControl&Automation, 2015, 8:373-384
Research on underwater snake-like robots’ mechanism design and their serpentine swimming performance
Xie Yafei***, Lu Zhenli*****, Xu Huigang**, Borovac Branislav****, Li Bin***
(*China University of Mining and Technology, Xuzhou 221116) (**School of Electrical Engineering and Automation, Changshu Institute of Technology, Changshu 215500) (***State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110014) (****Faculty of Technical Sciences, University of Novi Sad, Novi Sad 21000, Serbia)
Through imitating the serpentine swimming locomotion of natural underwater snakes, a prototypical underwater snake-like robot was designed based on the analysis of its mechanism and control system, and the experimental study on its serpentine swimming locomotion was conducted by using the serpenoid curve. Firstly, the force the snake-like robot suffered was studied and analyzed; Secondly, the serpenoid curve was used to control the snake-like robot and a dynamic model was established for serpentine swimming simulation study by the prototype; Finally, the serpentine swimming performance experiment on the snake-like robot was compared with that on the dynamics simulation to verify the necessity of modeling, thus providing a theoretical basis for practicalizing the technology.
snake-like robot, serpentine swimming, serpenoid curve, dynamic simulation
10.3772/j.issn.1002-0470.2016.06.011
①国家自然科学基金(61473283),机器人学国家重点实验室开放基金(2014-O08),校新引进教师科研启动项目(XZ1306)和中国-塞尔维亚政府间科技合作委员会第三届例会项目(国科外字[2015]266号3-1)资助。
2016-03-14)
②男,1991年生,硕士;研究方向:机器人智能控制;E-mail: yafei_xie1991@163.com
③通讯作者,E-mail: zhenlilu@cslg.cn
猜你喜欢
军事文摘(2021年18期)2021-12-02
哈尔滨轴承(2021年1期)2021-07-21
小学科学(2020年11期)2020-03-04
自动化学报(2019年6期)2019-07-23
中国特种设备安全(2018年10期)2018-12-18
电子制作(2018年1期)2018-04-04
金色年华(2017年13期)2017-04-04
制造业自动化(2017年2期)2017-03-20
舰船科学技术(2015年8期)2015-02-27
天津诗人(2014年4期)2014-11-14