
气动载荷作用下高速列车横向振动虚拟惯性阻尼半主动控制研究
2016-11-24 06:17陈春俊何洪阳闫中奎
振动与冲击 2016年20期
陈春俊, 何洪阳, 闫中奎
(西南交通大学 机械工程学院,成都 610031)
气动载荷作用下高速列车横向振动虚拟惯性阻尼半主动控制研究
陈春俊, 何洪阳, 闫中奎
(西南交通大学 机械工程学院,成都 610031)
高速列车在会车气动载荷作用下,车体横向振动加剧,传统的基于天棚阻尼原理的半主动控制对此横向振动控制效果并不理想。针对这一问题,利用系统动力学仿真分析软件UM,建立CRH某型高速列车三维模型,分析气动载荷作用下车体横向振动的特征;提出了用工程中的可控阻尼实现阻尼力与加速度成正比而方向相反的虚拟惯性阻尼控制算法,在轨道不平顺及气动载荷激励下对车体横向振动进行半主动控制。结果表明:虚拟惯性阻尼控制方法不仅能抑制轨道不平顺引起的横向振动,还能很好地衰减气动载荷带来的横向振动,提高列车横向平稳性;能对人体头部和内脏较敏感频率范围的横向振动也有较好抑制,提高旅客舒适性。
高速列车;气动载荷;虚拟惯性阻尼;半主动控制;横向平稳性
随着列车高速化与轻量化发展,列车空气动力效应加剧[1-2],尤其在明线会车及隧道运行时气动载荷作用下,引起的车体横向振动是轨道不平顺振动激励的几倍,严重影响旅客的乘坐舒适性[3-4]。因此,研究气动载荷带来的横向振动显得非常必要。半主动悬挂控制能有效改善轨道不平顺引起的列车横向平稳性[5-6]。半主动悬挂二系阻尼器作为可控阻尼器,通过调节阻尼值控制阻尼力来改善列车横向平稳性,传统天棚阻尼控制作为最常用的方法[5,7-8],对车辆的横向振动控制有较好的效果。然而传统的天棚阻尼控制对轨道不平顺引起的车体低频振动抑制较好,但受可调阻尼器频响的限制,对会车气动载荷引起的车体瞬态横向振动抑制效果并不理想。
针对这一问题,建立CRH某型高速列车模型,在车体上加载两列车在明线上350 km/h等速交会产生的气动载荷,分析气动载荷对车体横向振动的影响;同时提出虚拟惯性阻尼控制算法,能很好地控制气动载荷带来的列车横向振动,提高旅客的乘坐舒适性。
1 车辆动力学模型
车辆系统是一个复杂的多自由度、非线性多刚体系统,建模过程中考虑轮轨接触几何关系的非线性、横向止挡的非线性、抗蛇行减振器以及部分减振器的非线性特性,蠕滑力的计算采用Kalker非线性蠕滑理论。利用车辆系统动力学仿真分析软件UM建立CRH某型高速列车三维动力学模型[5,9],如图1所示。除弹性、阻尼元件外的各个部件均视为刚体,对于车体、构架和轮对分别均考虑横移、沉浮、伸缩、侧滚、点头和摇头6个自由度,单节列车的动力学模型共42个自由度,其主要参数见表1。得到车辆的位移向量为:
(1)
式中:向量Xc,Xf和Xw分别为车体、构架和轮对的位移。利用Lagrange原理车辆系统动力学方程可表示为[10]:
(2)
式中:Mv,Cv和Kv分别为42×42的质量阵、阻尼阵和刚度阵;Fev和Fav分别为由轨道不平顺引起的作用在轮对上的等效力和交会气动载荷。选用LMA型踏面作为车轮踏面,钢轨采用60 kg标准型钢轨。
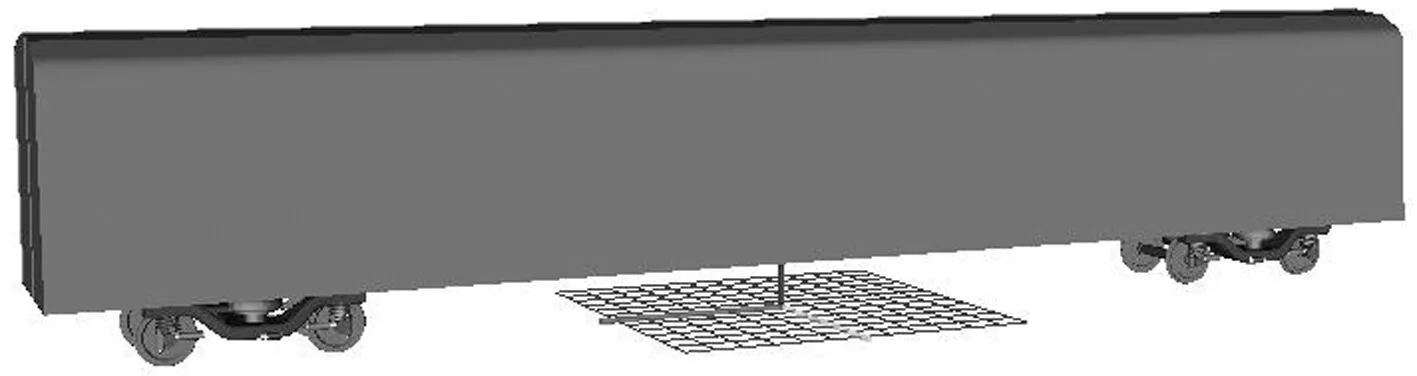
图1 车辆动力学模型Fig.1 Vehicle dynamics model

名称数值名称数值名称数值轮对质量/kg1850构架质量/kg2400车体质量/kg33766轮对侧滚转动惯量/(kg·m2)967构架侧滚转动惯量/(kg·m2)1944车体侧滚转动惯量/(kg·m2)109400轮对摇头转动惯量/(kg·m2)967构架摇头转动惯量/(kg·m2)2400车体摇头转动惯量/(kg·m2)1561300一系横向阻尼/(N·s·m-1)0二系横向阻尼/(N·s·m-1)20000一系横向刚度/(N·m-1)980000车辆定距之半/m8.75轴距之半/m1.25轮对半径/m0.43
2 气动载荷作用下动力学响应
2.1 气动载荷加载
文献[11]采用基于计算流体力学的数值模拟方法,计算得到隧道会车气动载荷,并进一步分析了气动载荷的构成和变化特点;作者在此基础上,运用相同方法计算明线交会时车体表面压力,通过二次开发提取出气动力和气动力矩。两列车明线上以350 km/h等速交会,其相对速度可达700 km/h,超过0.3马赫数,采用可压缩流三维瞬态的雷诺时均Navier-Stokes方程和κ-ε方程的湍流模型可获得列车交会时的气动力和气动力矩如图2所示,由图2可知侧向力和摇头力矩是气动载荷的主要成分。将上述气动力和力矩作用在车体上,对式(1)和(2)进行求解,即可得到车体横向振动加速度。采用德国低干扰轨道不平顺激扰谱,系统采样频率取1 kHz。
2.2 振动特性分析
根据列车平稳性评价标准取转向架心盘上横向1 m处的加速度值进行分析。本文研究的列车交会过程,是一个瞬态气动载荷激励的冲击响应过程,选用车体加速度峰值、均方根值作为评定指标[12]。根据GB 5599—1985《铁道车辆动力学性能评估和试验鉴定规范》规定[13]:横向振动加速度的峰值Peak小于2.5 m/s2。

图2 气动载荷时域图Fig.2 Time-domain chart of aerodynamic loads
在车体上加载2.1节所述的气动载荷,二系横向阻尼取被动时最佳阻尼值,即Csy=20 kN·s/m,分析被动情况下气动载荷对车体横向振动的影响。由图3(a)和表2可知,轨道不平顺和气动载荷共同作用引起的车体横向振动是仅轨道不平顺引起的车体横向振动的3倍多;车体横向振动的均方根值由0.175 5变为0.277 5,增大了58.12%;根据GB 5599—1985标准可得到会车时段内列车横向平稳性指标,仅考虑轨道不平顺时平稳性指标值为1.823 0,加载气动载荷后增大为2.320 9,平稳性指标增大了27.31%。可见气动载荷会引起车体横向振动急剧增大,导致车辆的横向平稳性变差。

表2 加载前后振动加速度变化
由图3(b)可知,轨道不平顺引起的横向振动加速度频谱集中在0~4 Hz,而气动载荷和轨道不平顺共同作用引起横向振动加速度频谱分别集中在0~4 Hz、6.5 Hz、10 Hz附近。根据文献[14]可知,在2.7 Hz头部振动响应比内脏强烈,在6.2 Hz附近头部和内脏的振动响应相当,在11.5 Hz左右内脏响应比头部的强烈。得知气动载荷带来的车体横向振动会给旅客身体的头部、内脏等器官产生不舒适感觉。

图3 气动载荷作用下车体横向加速度时域图和频谱图Fig.3 Time-domain and spectrum chart of lateral acceleration under aerodynamic loads
3 虚拟惯性阻尼控制
3.1 虚拟惯性阻尼的思想及算法


图4 天棚横向控制原理图Fig.4 The theory of skyhook lateral control
(3)

传统天棚阻尼控制在设计上主要考虑轨道不平顺引起的车体振动,其振动是由轮对传递转向架、再由转向架传递至车体,是一个自下而上的作用过程。气动载荷带来的横向振动是由车体传向转向架、再传递到轮对,是一个自上而下的作用过程。气动载荷带来的车体横向振动幅值较大、作用时间较短,车体和转向架都表现出受强迫振动的瞬态特征。
图5为气动载荷作用下车体横向振动加速度、速度与侧向力的变化曲线。车体横向振动加速度与侧向力有着相同的变化趋势,而车体横向振动速度是加速度的积分,发生了一次波动。从幅值上看,横向振动加速度幅值在±2 m/s2附近,快速收敛至零;而横向振动速度幅值只有±0.1 m/s,收敛至零的速度较慢。因此,传统天棚阻尼控制可能并不适用于抑制气动载荷作用下车体的横向振动。气动载荷作用下车体与转向架的相对速度和车体横向振动加速度的曲线如图6所示,在会车过程中车体横向振动加速度的方向基本上与相对速度的方向相同,而幅值远大于车体横向振动速度和相对速度的幅值,如果根据车体横向振动加速度设计控制算法可提供更大的衰减阻尼值。

图5 气动载荷作用下的车体横向加速度和速度曲线Fig.5 Lateral acceleration and velocity of the vehicle body under aerodynamic loads
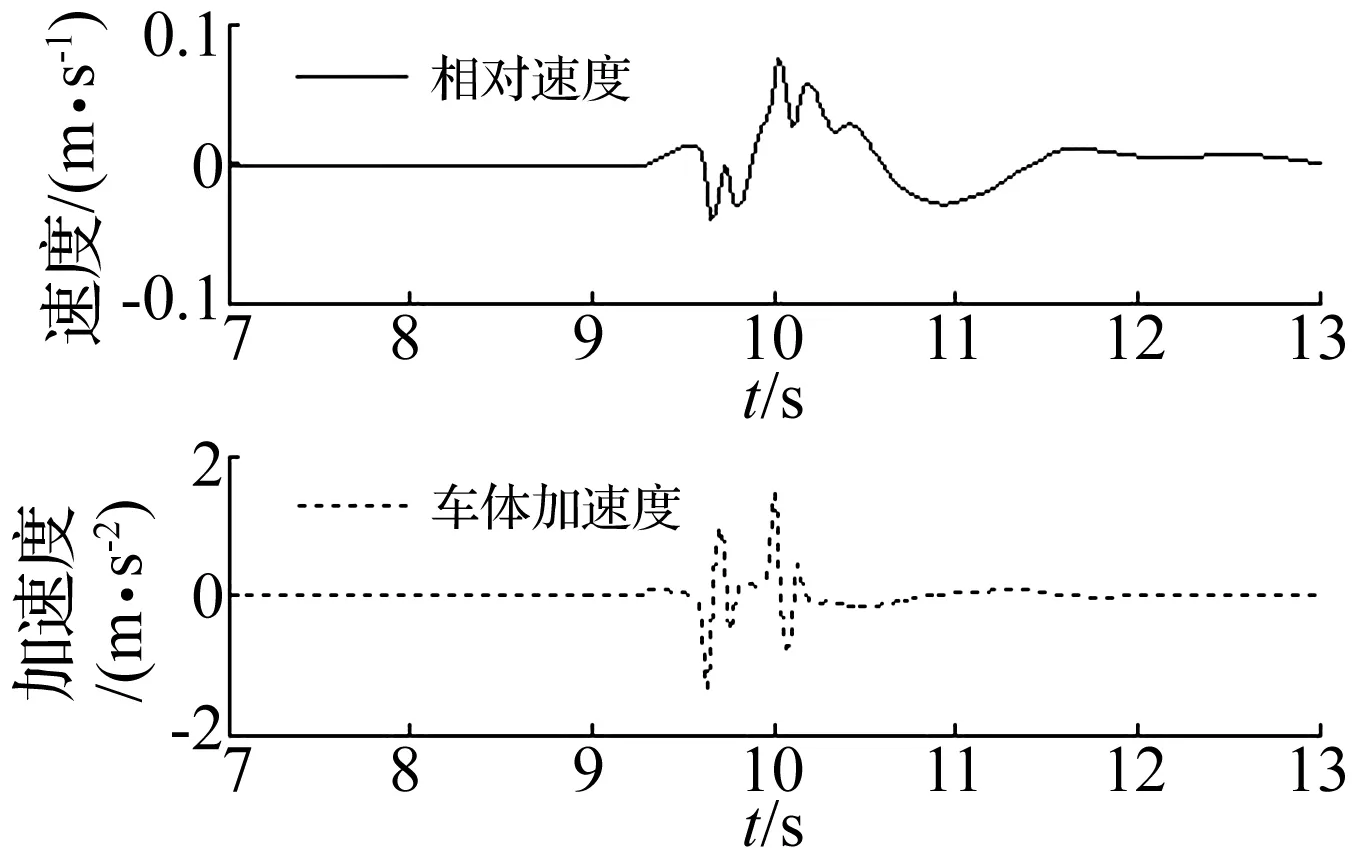
图6 相对速度与车体横向加速度曲线Fig.6 Relative velocity and lateral acceleration of the vehicle body

(4)
式中:Cm设为质量阻尼系数,具有质量的量刚,单位为N·s2/m。
上述提出的虚拟惯性阻尼器的力学特性是虚拟的,即与加速度成正比的耗能元件在物理系统中并不存在;而是通过传感器和计算机控制,将物理系统中阻尼力与速度成正比的可控阻尼器来实现虚拟弹性阻尼,将物理可调阻尼器实现虚拟惯性阻尼器的算法为[5]:
(5)

结合式(3)和式(5),提出车辆横向虚拟惯性阻尼的天棚控制算法为[5]:
(6)

3.2 仿真分析
根据1节建立的车辆系统动力学仿真分析模型,同时利用SIMULINK设计3.1节所述的虚拟惯性阻尼控制算法,从而实现UM与MATLAB/SIMULINK联合仿真。前后转向架的二系横向阻尼值作为模型输入,以转向架心盘上横向1 m处的振动加速度、振动速度以及前后转向架的振动速度作为模型输出。
从时域、频域两个方面分析虚拟惯性阻尼控制对气动载荷加载下车体横向振动的控制效果,图7为虚拟惯性阻尼控制、传统天棚阻尼控制与被动悬挂仿真得到的车体横向振动加速度时域图和频域图。由图7可知,与被动悬挂相比,采用传统天棚阻尼控制,横向振动加速度最大值由1.505 2变为1.416 4,仅降低了5.90%;加速度最小值由-1.282 8变为-1.224 5,仅降低了4.54%;横向振动加速度均方根值由0.277 5减小为0.235 8,减小了15.03%。传统天棚阻尼控制前后,均方根值有较大变化,而加速度峰值改变不大,可知天棚阻尼控制在一定程度上能很好抑制轨道不平顺引起的横向振动,但对气动载荷带来的横向振动控制效果并不明显。采用虚拟惯性阻尼控制,横向振动加速度最大值由1.505 2降为0.927 9,减小了38.35%;加速度最小值由-1.282 8降为-0.818 8,减小了36.17%;横向振动加速度均方根值由0.277 5减小为0.177 7,降低了35.96%。与被动悬挂、传统天棚阻尼控制相比,虚拟惯性阻尼控制不仅能抑制轨道不平顺引起的横向振动,还能很好地衰减气动载荷带来的横向振动,大大改善了列车横向平稳性,提高了旅客的乘坐舒适性。
由图7(b)所示的频谱图可知,轨道不平顺和气动载荷共同作用引起的横向振动主要集中在在0~5 Hz、6.5 Hz、10 Hz附近,而人体头部、内脏等器官对该频段内横向振动最为敏感。在改善该频段内车体横向振动加速度方面:传统天棚阻尼控制比被动悬挂好,虚拟惯性阻尼控制比传统天棚阻尼控制好。
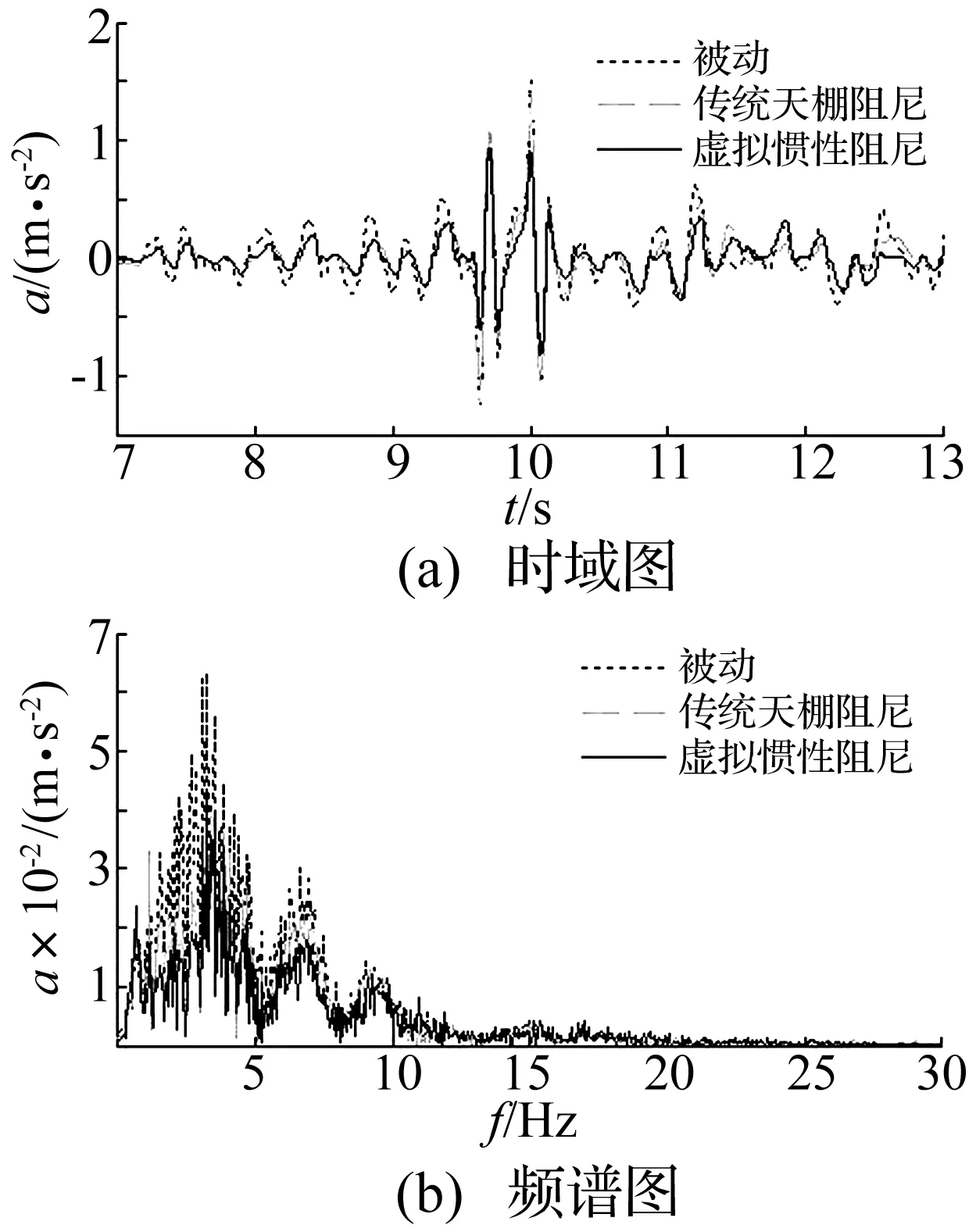
图7 控制前后车体横向加速度时域图和频谱图Fig.7 Time-domain and spectrum chart of lateral acceleration before/after control
4 结 论
(1) 加载会车气动载荷,车体横向振动加剧;轨道不平顺和气动载荷共同作用引起车体横向振动频谱主要集中在0~4 Hz、6.5 Hz、10 Hz附近,该范围横向振动对乘客的头部、内脏等身体器官均带来不舒适;
(2) 分析了气动载荷带来车体横向振动的特点,提出虚拟惯性阻尼控制算法。结果表明:与被动悬挂、传统天棚阻尼控制相比,虚拟惯性阻尼控制不仅能抑制轨道不平顺引起的横向振动,还能很好地衰减气动载荷带来的横向振动,提高车辆横向平稳性。此外,虚拟惯性阻尼控制对抑制人体头部、内脏等较敏感频率范围内的横向振动也较好的效果。
[1] 田红旗. 列车空气动力学[M]. 北京:中国铁道出版社, 2007:138-148.
[2] RAGHU S, KIM H D, SETOGUCHI T. Aerodynamics of high-speed railway train [J]. Progress in Aerospace Science, 2002,38:469-514.
[3] 佐佐木君章. 改善高速列车的横向乘坐舒适度-半主动悬挂减振装置的应用[J]. 铁道学报,2004,26(1):1-10.
SASAKI K. Improving lateral ride comfort of high-speed trains applying semi-active suspension system to high-speed trains[J].Journal of the China Railway Society, 2004,26(1):1-10.
[4] 缪晓郎,陈春俊,李淼. 高速列车明线交会对列车的横向振动影响研究[J]. 铁道学报,2014,36(12):14-19
MIAO Xiaolang, CHEN Chunjun, LI Miao. Influence of intersection on lateral vibration of high-speed trains on open tracks[J].Journal of the China Railway Society, 2014,36(12):14-19.
[5] 陈春俊. 高速列车主动与半主动控制[M]. 成都:西南交通大学出版社,2015.
[6] 姚建伟,嘎尼. 用主动悬挂技术是改善机车横向动力学性能的有效途径之一[J].铁道机车车辆,2002,22(增刊1):177-178.
YAO Jianwei, GA Ni. An effective way to improve lateral dynamic performance of locomotives by using active suspension technique[J]. Railway Locomotive & Car, 2002,22(Sup1):177-178.
[7] CLLETTE C, PREUMONT A. High frequency energy transfer in semi-active suspensions[J]. Journal of Sound and Vibration, 2010,329:4604-4616.
[8] SAVARESI S M. Mixed sky-hook and ADD: approaching the filtering limits of a semi-active suspension[J]. Journal of Dynamic Systems Measurement and Control ASME, 2007,129(4):382-392.
[9] 刘宏友,曾京,李莉,等. 高速列车二系横向阻尼连续可调式半主动悬挂系统的研究[J]. 中国铁道与科学,2012,33(4):69-74.
LIU Hongyou, ZENG Jing, LI Li, et al. Study on secondary lateral continuous adjustable damping semi-active suspension device for high-speed train[J].China Railway Science, 2012,33(4): 69-74.
[10] WICHENS A G. Fundamental of rail vehicle dynamics: guidance and stability[M]. Lisse, Netherlands: Swets & Zeitlinger Publishers, 2003:218-265.
[11] 刘小燕,陈春俊,何洪阳. 高速列车隧道会车时气动载荷的研究[J]. 机械设计与制造,2014,11(11):161-164.
LIU Xiaoyan, CHEN Chunjun, HE Hongyang. Study on aerodynamic loads of high-speed train crossing through a tunnel[J]. Machinery Design & Manufacture, 2014,11(11):161-164.
[12] 赵迎辉. 高速交会列车的气动性能及车辆动力学特性研究[D].成都:西南交通大学,2012, 5:10-13.
[13] 国家标准化管理委员会. 铁道车辆动力学性能评定和实验鉴定规范:GB 5599—1985[S]. 北京:中国标准出版社, 1985:1-5.
[14] 张济民,胡用生,陆正刚. 轨道车辆运行过程中人体振动仿真研究[J]. 振动与冲击,2007,26(10):76-80.
ZHANG Jimin, HU Yongsheng, LU Zhenggang. Vibration simulation of human body on running railway vehicle[J]. Journal of Vibration and Shock, 2007,26(10):76-80.
[15] KARNOPP D, CROSBY M J, HARWOOD R A. Vibration control using semi-active force generators[J]. Journal of Engineering of Manufacturing Science and Engineering, 1974,96(2):619-626.
Virtual inertial damping semi-active control for high-speed-train lateral vibration under aerodynamic loads
CHEN Chunjun, HE Hongyang, YAN Zhongkui
(School of Mechanical Engineering, Southwest Jiaotong University, Chengdu 610031, China)
Lateral vibration of high-speed trains will get exacerbated under intersection aerodynamic loads. The traditional semi-active control methods based on skyhook damping principle cannot achieve good effect for the lateral vibration. To solve the problem, a three-dimensional model of a certain type of CRH high-speed train was established with the vehicle system dynamic simulation software UM. And the characteristics of the vehicle lateral vibration were analyzed under aerodynamic loads. A virtual inertial damper control method was presented to realize semi-active control to vehicle lateral vibration under the excitation of track irregularity and aerodynamic loads. This control method was achieved by engineering controllable damping, whose damping force was proportional to the acceleration in the opposite direction. The results show that virtual inertial damping semi-active control can suppress the lateral vibration caused by track irregularity and also attenuate the lateral vibration brought by aerodynamic loads, which improves the lateral stability of the train. Meanwhile, the lateral vibration is also suppressed in the frequency range to which human man’s head and internal organs are more sensitive. This improves passenger comfort.
high-speed train; aerodynamic loads; virtual inertial damping; semi-active control; lateral stability
国家自然科学基金资助项目(51475387;51375403);中央高校基本科研业务费科技创新项目(SWJTU12CX038)
2015-06-25 修改稿收到日期:2015-10-12
陈春俊 男,博士,教授,博士生导师,1967年生
E-mail:cjchen@swjtu.cn
U260.111;U270.1
A
10.13465/j.cnki.jvs.2016.20.010
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
装备制造技术(2020年2期)2020-12-14
装饰装修天地(2020年10期)2020-07-04
今日农业(2019年12期)2019-08-15
中国照明(2016年5期)2016-06-15
专用汽车(2016年12期)2016-02-11
山东工业技术(2014年20期)2014-10-21
振动、测试与诊断(2014年6期)2014-03-01
计算机辅助工程(2012年5期)2012-11-21
汽车与新动力(2012年5期)2012-03-25
