慕课教学系统中三维交互技术研究
2016-11-12 07:50:53马洁
微型电脑应用 2016年3期
马洁
慕课教学系统中三维交互技术研究
马洁
针对目前课堂教学过程中遇到的问题,提出新的慕课虚拟教学系统教学模式,给出慕课虚拟教学系统结构模型,详细说明了红外线感应屏的工作原理与软硬件具体实现过程。通过实验验证了所选择的红外对管作为感应器件的可行性,采用二元控制方法控制数目巨大的红外对管的工作状态,大大精简了硬件电路,实现了各元器件的最大利用率。采取定区域取窗扫描方法检测感应信号,使感应屏的反应时间大大缩短。以汽车设计课程中机械中间轴式五档变速器设计的原理介绍为实例,叙述了以70 英寸红外感应屏为媒介,实现三维展示变速器的机械结构、对变速器的工作情况实时控制进行简单友好交互,使学生通过直观的实时交互动画清楚的看到变速器的工作过程。
慕课虚拟教学;慕课虚拟现实;红外感应;慕课虚拟课件;三维交互
章编号:1007-757X(2016)03-0063-04
0 引言
随着计算机技术的发展,多媒体教学已经越来越广泛地应用于课堂教学。但随着近几年现代化教学的应用,普通多媒体教学系统的弊端就暴露无遗:在讲课时,教师必须站在电脑旁通过鼠标或键盘操作课件,大大降低了教学的灵活性,拉远了教师与学生的距离;课堂讲解只能以已有电子文档为基础,不能随时在其基础上更改或者实时做出批注进行更加详细的说明,大大限制了教师、黑板与学生之间的交互性;教学课件为二维显示,对于很多需要进入结构体内部的立体显示场合,无法满足学生对三维信息的需要。本文主要针对目前课堂教学过程中遇到的以上问题,提出了新的慕课虚拟教学系统教学模式,并着重研究了其中的若干重要技术。
1 .慕课虚拟教学系统结构模型
本文所提出的教学交互模式以建构主义学习理论为指导,充分考虑了教学过程中老师、学生和教学内容三者的实时、多样化的交互作用,为学生的学习建立慕课虚拟学习环境或者是慕课虚拟的教学模型,并配合双目立体视觉技术,使深奥、难懂的理论学习或者是比较复杂的空间结构认识变得直观、简单,课件根据操作者不同的触发动作做出不同的反馈。本论文结合建构主义学习理论,提出了完整的慕课虚拟教学交互模式,如图1所示:
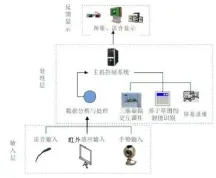
图1 慕课虚拟教学交互模式
按照功能划分主要由输入层、处理层、反馈显示3部分组合而成。
输入层:采用红外感应屏、麦克风、摄像头相结合即精确交互和非精确交互相结合的3通道人机交互输入手段。大尺寸红外感应屏作为精确交互输入方式,比如老师的板书和绘图、重点标示等操作。非精确简单交互采用麦克风语音识别和摄像头模式识别来实现,比如对模型的旋转、移动以及课件的打开和关闭等简单操作。
处理反馈层:是慕课虚拟教学交互系统的核心,它包括对输入层信号的数据分析与处理处理,根据不同的程序环境判断出输入层的信号含义,从而使主机、三维慕课虚拟交互课件、基于草图的智能识别程序和屏幕录像产生相对应的动作。
显示层:通过背投箱显示系统和音响设备将处理层对输入层的处理结果直观的通过文字、图片、视频、语音等形式显示出来,并且可以通过红绿立体眼镜更真实的看到慕课虚拟三维世界和三维模型,给学生身临其境、如见实物的感觉。
2 .红外感应屏实现
2.1红外感应屏的工作流程
红外线式触摸屏,一般是在显示器屏幕的前面安装一个外框,外框里有电路板,在屏幕的横向和纵向(X、Y方向)有排布均匀紧密的红外发射管和红外接收管,一一对应形成横竖交叉的红外线矩阵,如图2所示:

图2 红外线感应屏工作原理
首先,进行开机自检,包括对软件是否正常安装和硬件的连接、工作情况是否完好。如果存在问题抛出相对应异常情况比如串口未连接或者是某一元器件出现问题,如果一切正常开始执行红外对管电路扫描程序。纵向和横向排列的两组红外对管可以分别感应到触摸点(如果存在)的纵坐标(Y)和横坐标(X),从而确定触摸点的位置坐标,触摸屏上触摸点的位置坐标与主机显示器屏幕坐标相对应,可以确定显示屏幕上感应点的位置坐标,并根据其他信息确定要执行的动作。
2.2确定触摸点位置
硬件不变情况下,通过软件设计来提高系统分辨率,这就是软件增容技术。本文通过软件增容技术确定触摸点位置坐标实现了将触摸屏分辨率提高一倍。
红外式触摸屏的分辨率取决于红外对管的数量,这些红外对管在屏前形成光网,粗实线所示如图3中:
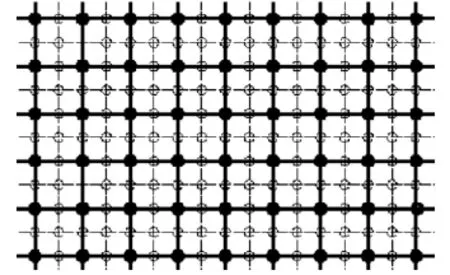
图3 红外线光网
对于M*N红外对管构成得触摸感应网而言,所形成的光网也是M*N,即M行N列,这些光网的节点既是可确定的触摸点。
由于红外对管的排列距离等于管子直径,即 3mm,操作者在执行触摸操作的过程中,很难保证一次只挡住一对红外对管,绝大多数情况下由于触摸物体阻挡宽度大于 3mm(比如经常用的手指宽度约为 10mm-15mm),因而会一次遮挡3-5对红外对管,为了更加准确的判断触摸点的位置坐标,需要取所有连续遮挡的红外对管坐标位置的平均值。即原来只能是第1、2等整数位置的实际红外线被感应,通过该方法可以实现第1.5、2.5等位置的红外线被感应。这样不仅使触摸点位置坐标更加准确,而且使屏幕分辨率提高了3倍,即由原来的M*N提高到2M*2N。
实际扫描过程中需要记录的只是第一根感应到触摸信号的红外对管的位置a,和接下来第一个没有感应到触摸信号的红外对管的位置b,则实际触摸点的位置坐标p通过公式(1)确定如公式(1):

由于红外对管的直径最小为 3mm,决定了触摸屏只能感应阻挡方向上宽度大于3mm的物体,而且触摸屏的物理分辨率也是3mm。
2.3扫描信号执行流程
首先,扫描横向红外对管,主要是从提高系统误判率的前提下考虑。考虑到人用手指触摸时触摸点纵向坐标重叠的概率要远远大于横线坐标重合的概率,因而,扫描横向红外对管的感应情况。如果整排横向红外对管都未感应,那么说明整张屏幕上没有任何感应物体,发送空扫描结果,重新开始扫描;扫描横向红外对管得到一个感应坐标后确定横向扫描范围,在该区域内得到另外一个横向感应信息,即在横向红外对管得到两个触摸信号,说明屏幕上至少有两个触摸物体,发送多点触摸信号,在这两点前后一定范围内重新开始扫描红外对管;如果横向红外对管扫描完成只得到一个触摸位置坐标,说明屏幕上只有一个位置被感应,继续扫描纵向红外对管,如果纵向红外对管扫描完成且没有得到任何触摸信号,说明之前存在的触摸动作已经结束,仍然作为空扫描无触摸处理,如果扫描过程中得到一个触摸信号即可结束本次扫描,将纵向横向触摸坐标组成一个完整的单点触摸信息传出。得到单点触摸信号之后在该点四周取窗扫描。取窗扫描思路:如果检测到有单点触摸物体,则计算该触摸物体的位置,而且人的动作速度有一定限制,不可能在很短的时间内移动到距离该触摸点很远的位置,因而以该触摸点位置作为参考点,选取该点上下左右若干对红外发射管和红外接收管设定新的、小于触摸屏尺寸的检测区域进行扫描。如果在该区域内再次扫描到触摸物体,则重复计算、设定扫描步骤继续检测触摸物体。如此重复扫描过程,如果某次在设定区域内没有检测到触摸物体,则重新开始对整个屏幕的扫描。取窗扫描过程如图4所示:
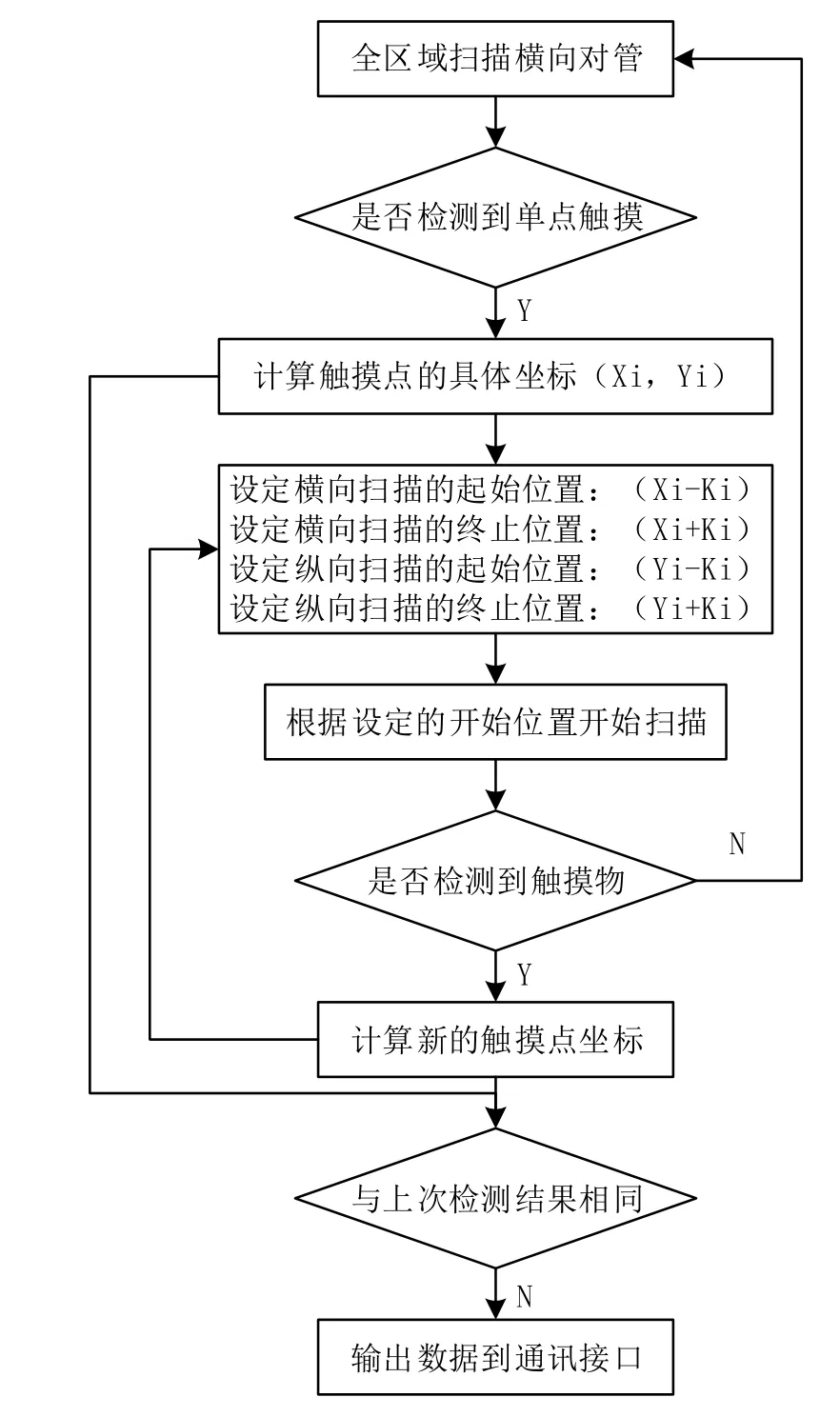
图4 取窗扫描流程
图4中K为参考点上下左右红外对管的数量,也是所设定的新的扫描区域宽度的一半。下面具体说明如何确定新的扫描区域大小即K的值。
2.4电路组织结构
在工作原理中已经介绍过,系统中用到的红外接收管和发射管数量非常多,所选用红外接收管和发射管直径为3mm(一般的红外接收管和发射管直径为3mm和5mm两种),那么触摸屏的长度为 L,宽度为 D,为了使触摸屏分辨率达到最大值,那么需要在四周紧密排布满这样的红外对管,需要的红外对管数量为
(L+D)/3(对)
以 70英寸 16:9的屏幕为例,屏幕的长和宽分别为1550mm和872mm,那么制造该尺寸需要的二极管对数为公式(2):

要实现对这么多的红外对管的控制,必须组织好控制电路,否则不但使电路非常复杂而且影响了电路的工作效率。
本文使用的电路组织方法是一种二元控制方法。每一单元电路由两条选通控制线控制,但每条选通控制线同时选通16路。这样,虽然单个电路的选通控制线增加了,但是整个系统所需的控制线却以几何倍数减少。一般的组织方法中需要 N条控制线的电路中,采用该二元法控制电路只需要的控制线路为M条如公式(3):

该方法的优势随着N的增加而更加明显。
在70英寸16:9的屏幕中需要用到807对红外对管,考虑到管子排列的间隙,取800对。
使用以上的二元控制法进行控制所需要的控制信号数量为公式(4):

即只需要66个控制信号就可以实现对于800对红外对管的选通控制。
3 三维可交互汽车变速器慕课虚拟教学系统开发
汽车变速器种类有多种,结构比较复杂,目前教学方式下老师通过两维原理示意图或者配合简单的动画演示变速箱结构及工作过程,需要花费较长时间的费力讲解,而学生通过看平面原理图很难理解变速器的三维结构以及动作控制过程,给老师的授课带来了不少的困难。通过70英寸16:9的红外线感应屏作为输入手段,实现对汽车设计中机械中间轴式五档变速器传动设计的原理介绍,使学生通过直观的实时交互动画清楚的看到变速器的工作过程,不同档位下各齿轮工作过程。
3.1硬件配置
学生是高校党建工作的主体,为了进一步提高高校学生党建工作的科学化水平,必须完善对学生的监督和管理工作。这要求高校有必要对学生入党前后的行为进行监督引导。同时高校需要完善对学生的日常管理机制,学生不仅要在党组织活动中表现出一定的积极性,在日常生活中,也应该以党员的标准来严格要求自己,约束自身的行为。因为有很多学生在入党后,缺乏有效的监督机制,容易放松对自身的要求,满足于已经取得的成绩,缺乏新动力。[4]
采用 70英寸背投系统作为输出显示设备,可以满足20-50个学生听课需要。与之相适应的红外感应屏的工作有效区域大小为70英寸。
该红外感应系统采用红外线发射管 IR204-A和红外线接收管PD204-6B作为感应元件。70英寸16:9的感应屏幕的长和宽分别为1550mm和872mm,可以排列的红外对管数量为800对,即横向512对纵向288对。采用的显示屏幕分辨率为 1024*576,因而红外对管坐标位置 XIR(横向坐标位置范围0—511,纵向坐标位置范围0—287)与显示屏幕坐标X对应关系为X=XIR+XIR。
采用3.4.3电路组织结构中所述二元组织法实现对这些红外对管工作状态的控制,所需要的控制信号数量为公式(5):
即只需要66个控制信号就可以实现对于800对红外对管的选通控制,其中16个信号控制红外对管阳极与电源端的选通与断开,另外50个信号控制阴极与地的选通与断开。这66个控制信号由5个4线-16线译码器74LS154产生。
5.2 感应屏信号扫描效率
前面已经介绍过需要800对红外对管,每扫描一对管子需要的时间为0.1ms,则完全扫瞄这800对管子需要的时间为0.08s。

取K=57。即扫描区域为参考点四周57对红外对管,两个方向上选择的红外对管数量为57x4=228对。需要的时间为0.0228秒,即扫描效率提高了如公式(7):

通过以上分析,系统的最长扫描时间为0.08S,而且只有在空扫描的基础上执行扫描动作,且此时感应点的位置在屏幕的最右下角时才能达到最长扫描时间,一般情况下只需要0.0228秒的时间就可以得到屏幕上的完整感应信息。
3.3变速器模型的建立
在 SolidWorks2007下建立变速器的三维模型。在模型建立的过程中,需要注意的是系统坐标原点与零部件的位置关系。为了保证零部件位于vrml的慕课虚拟场景中近似中间位置即系统原点位置,在 SolidWorks平台下建立零件模型时尽量将零件的几何中心与系统原点坐标重合,比如建立传动轴模型时将传动轴的几何中心与系统原点重合。
3.4变速器实时操控功能
根据实际教学需要,在此设计了以下操控动作,以方便教学过程中对该变速器的全面认识:调节档位、加减油门、模型缩放、模型旋转、透明化处理非传动件并指示传动过程,如表1所示:
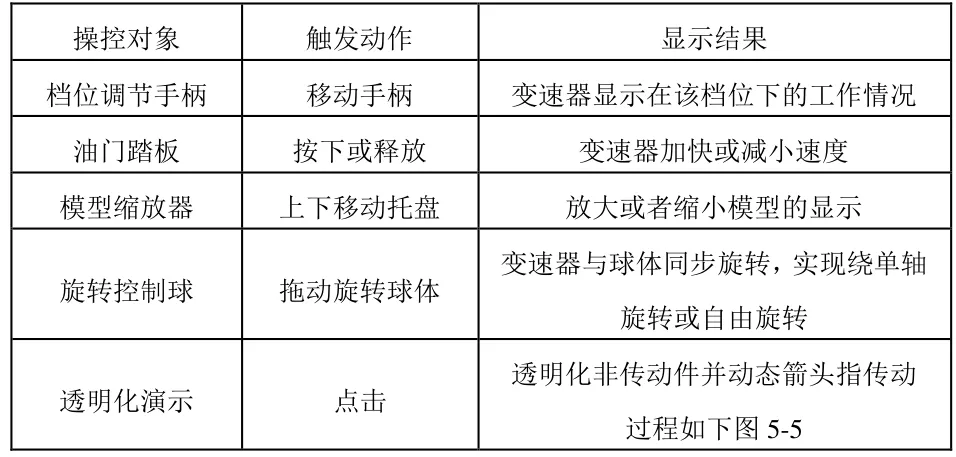
表1 变速器交互动作
其操控界面如图5所示:
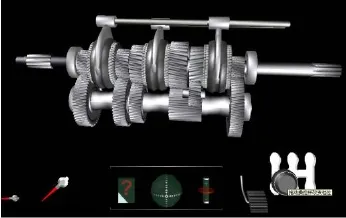
图5 减速器操控系统
4 总结
本文开发了汽车设计教学中机械中间轴式五档变速器传动设计慕课虚拟教学系统,详述了开发70英寸红外线感应屏的硬件配置以及可以实现的响应效率,设计了变速器的慕课虚拟教学课件,实现三维展示变速器的机械结构、对变速器的工作情况实时控制进行简单友好交互,使学生清楚的看到变速器的工作过程,不同档位下齿轮间啮合工作过程。实现了变速器的红绿立体三维显示。该系统是对目前变速器教学过程的革新,使老师的讲解更加清楚易懂,提高了讲课的效率,学生容易理解复杂的传动过程,提高了上课的兴趣。
[1] 崔凤国,程志辉.多媒体课件教学的利与弊[J].东北电力大学学报,2007,27 (3):51-53
[2] 赵宏斌.教育竞争力是国家竞争力的基石[J].教育科学,2008,4(4):26-28
[3] 肖海荣.教师多媒体教学能力的培养[J].医药沙龙,2005,3(8):32-33
[4] 黄 鑫.基于VR技术的慕课虚拟教学应用研究[J].武汉:华中师范大学,雪豹,2005:11-13
[5] Lampson Butler. Computing research in the 21st century[M] Chinese Information World ,1999-7-1 (A6)
[6] Wang J. Human-computer interaction research and practice in China[J]. Interactions,2003,10(2):88~96
[7] Taxen ,G, Naeve ,A. Cyber Math Exploring Open Issues in VR-based Learning [A] In : Proceeding of SIGGRAPH 2001 Educators Program[C].Los Angeles : Springer Press,2001.49-51.
[8] Pietro Murano, Dino Mackey. Usefulness of VRML building models in a direction finding context[J]. Interacting with Computers,2007,(19):305- 313
[9] 苗 壮,李凡长.基于慕课虚拟现实技术的教学改革研究[J].黑龙江教育(高教研究与评估版),2007,1(2):129-130
Research on 3d Interaction of MOOC Teaching System
Ma Jie
(Baoji professional technology institute,721000 Shaanxi,China)
In view of the problems existing in the current classroom teaching process,it puts forward the new virtual teaching system,and the teaching mode is given a virtual teaching system structure model. Then it details the working principle of infrared induction screen with hardware and software implementation process. Experimentation has proved that the infrared emitting diode and infrared photocell are suitable for the system. The binary controlling method is used to control the working state of large numbers of tubes,so the electro-circuit is condensed largely. The method scanning the signal in an area shortens the response time of the screen greatly. Regarding a 3D virtual interactive teaching system for vehicle transmission as an example,it uses 70 inches infrared sensor screen as the input means to realize real-time controlling transmission’s working state and demonstrate the gear meshing state under different location. Students can understand the complex structure and working principle easily.
Virtual Teaching,Virtual Reality,Interaction Techniques,Infrared Touch Screen(IRTS),Virtual Courseware,3D Interactive
G434
A
马 洁(1980-03),女,宝鸡职业技术学院,硕士,讲师,研究方向:计算机应用技术,宝鸡,721000
(2015.06.30)
猜你喜欢
农产品加工(2024年7期)2024-05-26 09:30:32
中学生数理化·八年级物理人教版(2021年10期)2021-11-22 08:00:02
汽车维修与保养(2020年11期)2020-06-09 05:42:16
装备制造技术(2019年12期)2019-12-25 03:06:36
知识就是力量(2018年7期)2018-07-11 06:39:56
汽车维修与保养(2015年6期)2015-04-17 03:31:37
汽车维护与修理(2015年6期)2015-02-28 12:17:26
发明与创新(2015年30期)2015-02-27 10:39:52
汽车维修与保养(2014年12期)2014-04-18 14:14:13
河南科技(2014年12期)2014-02-27 14:10:32