液压与气压传动实验教学的改革与实践
2016-11-10 08:00:20孙月华刘春生刘元林
实验技术与管理 2016年10期
孙月华, 徐 鹏, 刘春生, 刘元林
(黑龙江科技大学 机械工程学院, 黑龙江 哈尔滨 150027)
液压与气压传动实验教学的改革与实践
孙月华, 徐鹏, 刘春生, 刘元林
(黑龙江科技大学 机械工程学院, 黑龙江 哈尔滨150027)
根据“卓越工程师教育培养计划”的要求,对液压与气压传动的实验教学内容进行了改革,在传统实验的基础上增加了具有工程应用的系统设计与仿真实验。以肋片管自动焊接机液压系统为例,较详细地介绍了所增加实验的实验过程和仿真方法。通过该实验教学内容的改革逐步提升了学生的实际动手、创新、独立思考和软件应用能力,为卓越计划顺利地实施提供了保障。
液压与气压传动; 肋片管自动焊接机; 实验教学; 卓越工程师
2010年,教育部提出了卓越工程师教育培养计划,目的是培养一批具有创新能力、能更好地适应社会需要的高质量工程技术应用人才,为国家走新型工业化发展道路、建设创新型国家和人才强国战略服务[1-2]。本科教育不仅要培养研究型人才,更要以培养国际化、高水平、创新型人才为己任,学生应学以致用、各尽其才。
黑龙江科技大学的机械设计制造及其自动化专业是黑龙江省卓越试点专业,专业的建设目标是培养德、智、体全面发展,具有坚实的自然科学与技术、人文社会科学基础,具有机械设计制造基础知识及应用能力、自主学习和创新能力、组织协调能力,能在机械工程及相关领域从事机电产品设计制造、科技开发、运营管理等方面工作的复合型高级工程技术人才。实验教学是达到此培养目标的重要教学环节。
1 液压与气压传动实验教学内容改革
液压与气压传动课程是机械设计制造及其自动化专业的专业课程,该课程理论性强、与工程实际联系较密切。目前黑龙江科技大学共开设了10学时的液压与气压传动基础性实验。原实验方法、实验内容与多数工科院校基本相似,实验内容不能充分满足卓越工程师培养的需求,不能很好地发挥学生的创新能力。因此在卓越工程师培养目标的要求下,对液压与气压传动实验教学的改革是非常必要的。
为了提高学生的实践创新能力,更好地满足卓越工程师教育培养的要求,液压与气压传动实验教学在原有实验内容的基础上增加了具有工程实际的实验内容,对学生的实际动手能力、创新思维能力等进行全面的训练。学生能加深对理论知识的理解和应用,也能应用所学的基础理论、基础知识解决基本工程问题,较好地培养学生的创新能力和实践能力[3-5]。
2 工程应用背景下实验内容的设计
在原有的基础性实验的基础上增加了俱用工程应用的综合性、设计性实验。该实验是在学生学完液压与气压传动的理论课,同时做完基础性实验后来完成的。首先学生分成小组,每组3~4人,结合工程实际完成液压系统设计(该内容一般是指导教师给出),在液压试验台上联接并进行调试,同时应用液压动态仿真软件Automation Studio 对所设计的工程实际系统进行仿真,通过分析来判断所设计的系统是否满足工程实际。如不满足工程要求则重新设计和调整,最终使系统能更好地满足工程实际的要求[6-8]。
以肋片管自动焊接机液压系统为例说明综合性实验的实验过程。
2.1肋片管自动焊接机的主机工作过程
肋片管是一种散热片,是用电阻焊把肋片焊接在无缝管上的新型高效热能交换器。肋片管自动焊接机能把肋片自动地焊接在无缝管上,其动作主要由上料和焊接两部分组成,其中焊接机的上料动作通过能间歇运动的推/拉液压缸实现。
该液压运动完成工作的过程是:送片→片夹紧管夹紧→片堆焊→送片返回→片松开管松开→推片返回→小拖板夹紧→步进→大拖板夹紧→小拖板松开→步进复位→大拖板松开。
2.2自动焊接机液压系统设计
图1所示为焊接机的液压系统原理图。液压回路是双回路系统,图1左侧是步进系统,右侧是焊接回路系统。回路由液压泵1供油,溢流阀2和电磁换向阀3保证系统供油压力和系统卸荷,压力表4用来监测泵的压力。为防止油液倒灌和双回路互相干扰,分别增设了单向阀5和单向阀6。
2.2.1步进系统
图1左侧的步进系统由液压缸21、23实现拖板夹紧功能,液压缸22实现推拉动作。系统中的换向由换向阀8来实现。液压缸是按大、小拖板夹紧→小拖板松开→步进复位→大拖板松开的顺序来完成的,液压缸的顺序动作由压力控制方式来实现,也就是当系统压力变化时,由3个压力继电器控制各电磁换向阀的通断和单向阀14的开闭来完成步进动作。推/拉液压缸的运动速度由节流阀17来调节。
2.2.2焊接回路
图1右侧的焊接回路的执行器包括实现管夹紧、片夹紧、送片、片堆焊的液压缸31—34。与步进回路一样,该回路中三位四通电磁换向阀9是主换向阀。4种液压缸的动作顺序为送片→片夹紧→管夹紧→片堆焊→片返回→片松开→管松开→推片返回,缸的动作采用压力控制方式实现,也就是系统压力变化,单向顺序阀24、25、35和单向减压阀26及压力继电器27的启闭、发信使缸的油路通断,顺序实现上述动作。单向减压阀用于设定堆焊缸34的工作压力并保持其稳定,单向节流阀28和29则用于调节两个堆焊缸的工作速度。
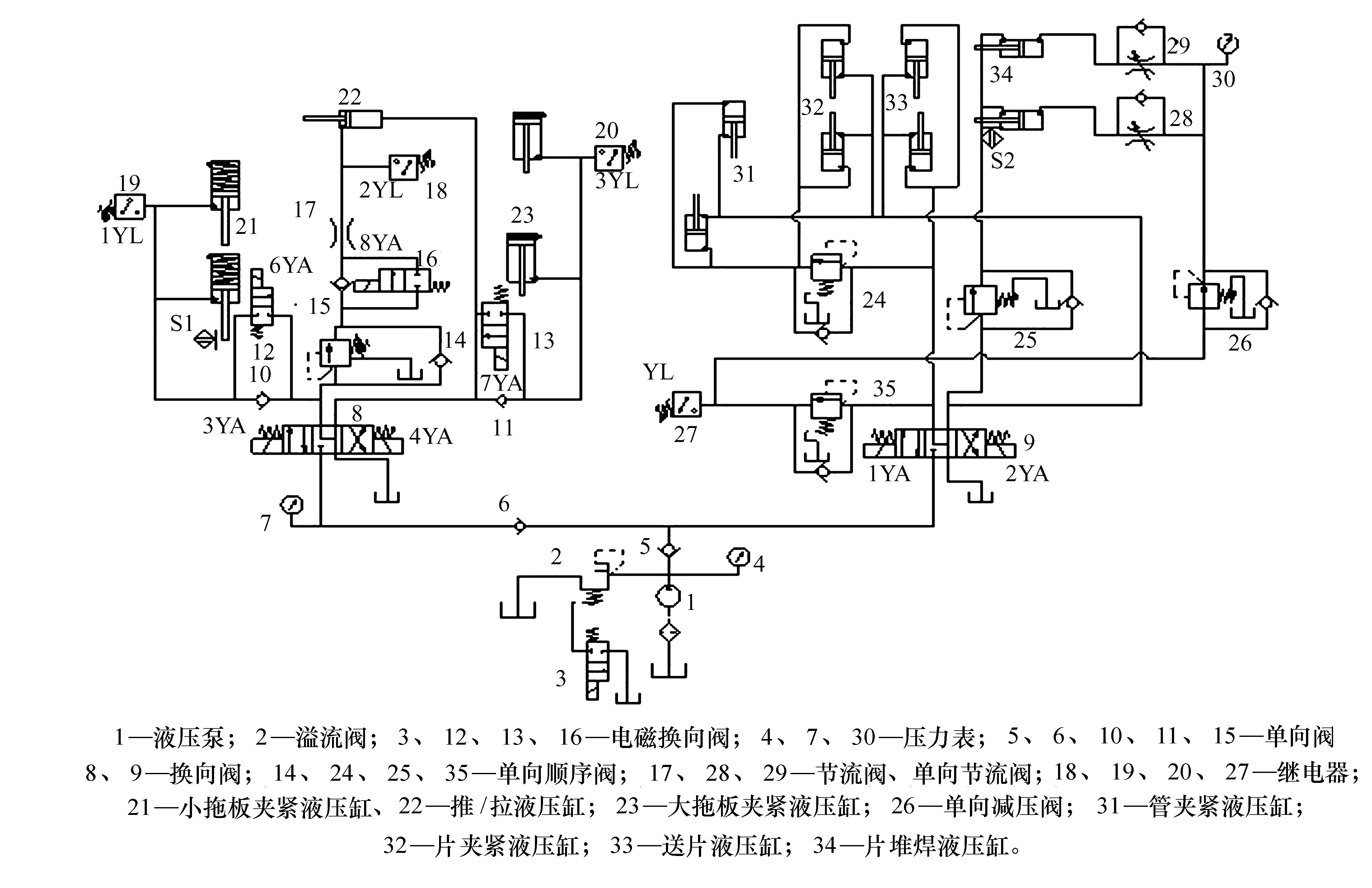
图1 焊接机的液压系统原理图
液压系统主要技术参数如下:
(1) 液压缸:缸筒内径100 mm,活塞杆直径50 mm,行程500 mm;
(2) 液压泵:排量100 mL/r,转速1 200 r/min。
2.3自动焊接机的配电原理及配电图
自动焊接机中液压元件的动作顺序如表1所示,配电图如图2所示。
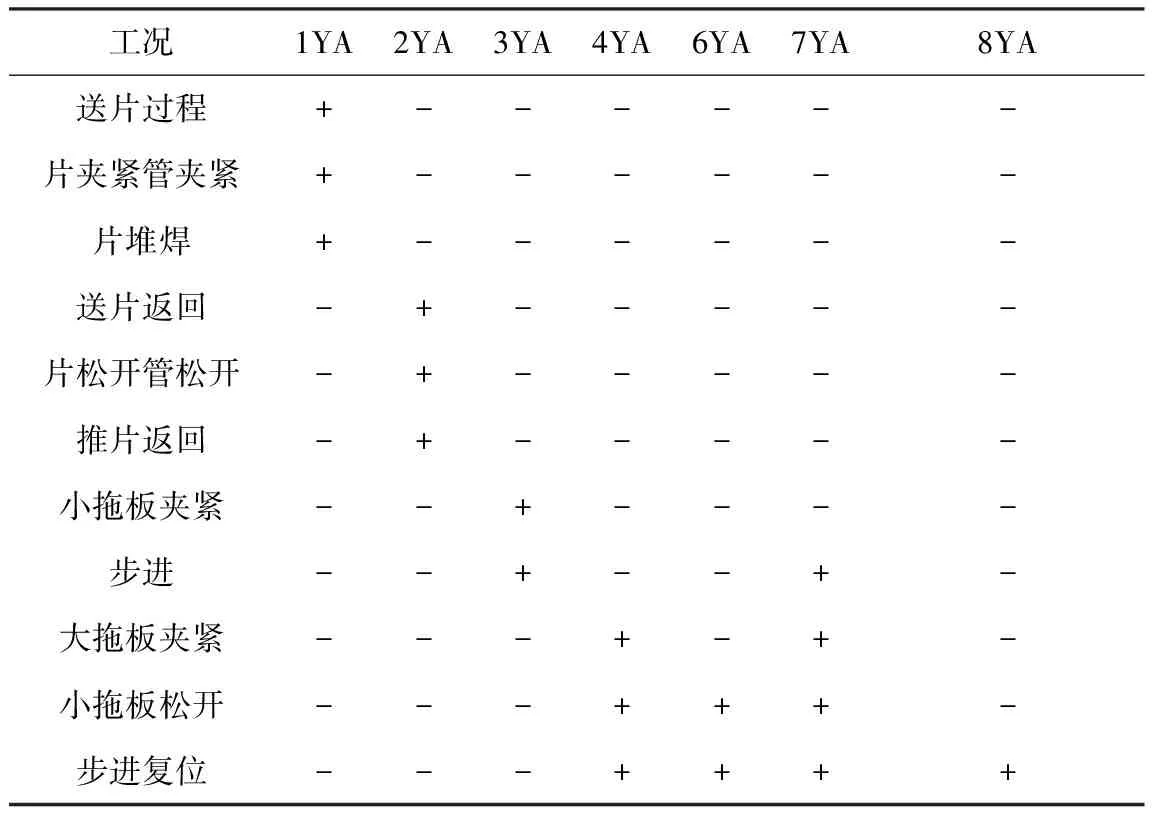
表1 自动焊接机中液压元件的动作顺序表
当焊接工作时,电磁铁1YA通电,使三位四通电磁换向阀9切换至左位,液压泵1的压力油经换向阀9进入缸32的无杆腔(有杆腔经阀9向油箱排油),进行送片动作。送片到位后,系统压力升高,顺序阀24打开,压力油经阀24分别进入缸31和缸32的无杆腔 (有杆腔经阀9向油箱排油),进行管夹紧和片夹紧动作。夹紧后,系统压力升高并打开单向顺序阀35,压力油流经阀35。油液经单向减压阀26分两路经节流阀28和29分别进入两个缸34的无杆腔,有杆腔经阀25和阀9向油箱排油,进行片堆焊。堆焊速度取决于阀28和阀29的开度。动作完成后压力继电器27发信,使换向阀9切换至右位,各液压缸回程复位。
进给工作时,电磁铁3YA带电、三位四通电磁换向阀8左位工作,泵1的压力油经单向阀5和阀6、换向阀8、单向阀10进入小拖板夹紧缸21的有杆腔,小拖板固定在工作台导轨上。当系统压力升高到继电器19的设定值时发出信号,使电磁换向阀13的电磁铁7YA带电,阀13下位工作,缸23在无杆腔的弹簧作用下,松开大拖板,有杆腔的回油经阀13和阀8回油箱排油。
当压力继续升高达到阀14设定值时,14打开,压力油经阀14、15、17进入推/拉缸22的有杆腔,推/拉缸工作。当推/拉缸停止工作后,继电器18发信,换向阀8中的电磁铁3YA失电,4YA通电,换向阀8右位工作,压力油经阀8进入推/拉缸22的无杆腔,另一路经阀11进入大拖板夹紧液压缸23的有杆腔,在单向阀15的作用下,推/拉缸22有杆腔回油被截止,因此该缸不动。大拖板夹紧液压缸23的活塞杆工作将大拖板固定在导轨上,当夹紧后,继电器20发信使6YA、8YA通电,12上位工作和16右位工作,小拖板夹紧液压缸21有杆腔经阀12和阀8回油,小拖板松开,而推/拉缸22的有杆腔油经节流阀17、换向阀16、单项顺序阀14、换向阀8流回油箱,活塞杆复位。
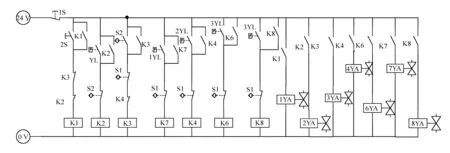
图2 自动焊接机配电图
2.4推/拉液压缸的速度特性分析
推/拉液压缸的速度特性曲线如图3所示。

图3 推/拉液压缸速度曲线
T1的前一时刻推/拉液压缸静止,因此速度为零。当到达T1时刻时,推/拉液压缸处于推的状态,到达极限位置时停止,速度变为零;T2时刻为大拖板夹紧过程与之无关,因此速度为零。当到达T3时刻时,推/拉液压缸处于拉的过程,当达到左侧极限位置时停止。从图3可以看出:T1和T2过程推/拉液压缸的推和拉动作运行速度平稳,大小相等、方向相反,与实际步进过程一致,因此满足要求。
2.5结论
(1) 焊接机的液压系统采用单泵双回路形式,各回路设一个主换向阀,两个回路间由单向阀隔离,以避免相互干扰。
(2) 焊接机的进给送料通过导轨上的大小拖板和推/拉液压缸的间歇运动来实现。步进回路采用压力继电器和电磁换向阀配合实现各液压缸的既定动作顺序。与采用机械、步进电机、步进液压缸3种步进方式相比,能满足长距离的步进的要求,成本较低。
(3) 焊接回路采用单向顺序阀的压力控制方式实现多缸的动作顺序转换;采用减压阀和单向节流阀实现堆焊缸工作压力的设定和调速。
通过几年来实验教学实践,学生认为工程实际应用的系统设计实验对他们的实际动手能力、分析问题和解决问题能力、创新能力都有较大提高。
3 结语
液压与气压传动在工程实际中应用非常广泛。液压与气压传动实验通过“工程设计→实际搭建→Automation Studio系统仿真”的实践过程,成为学生应用工程实例、自己动手亲历锻炼、采用软硬件结合的高等院校是“卓越工程师”培养的重要基地,要提高工程技术应用人才的培养质量,实践教学的改革是必不可少的,通过改革能培养学生的创新能力和实践动手能力。通过不断地改革,使实验教学更加贴近当今技术的发展趋势,有利于培养适应社会发展需要的高质量技术人才[9-13]。
References)
[1] 张应红,孙永厚,景晖,等.卓越工程师培养计划背景下材料力学实验改革与实践[J].实验技术与管理,2014,31(5):222-224.
[2] 林健.卓越工程师培养目标下的材料类本科专业课程体系建设[J].教育教学论坛,2014(4):237-239.
[3] 曹贺,刘春生,陈国晶,等.卓越计划背景下科学构建工程化实践教学模式研究[J].实验技术与管理,2014,31(10):40-42.
[4] 李继怀,王力军.工程教育的理性回归与卓越工程师培养[J].黑龙江高教研究,2011(3):140-142.
[5] 林健.卓越工程师创新能力的培养[J].高等工程教育研究,2012(5):1-17.
[6] 曹贺,赵存有,侯清泉,等.卓越计划背景下“液压与气压传动”课程教学改革研究[J].实验室研究与探索,2015,34(3):209-211.
[7] 潘艳平,包秋燕,江吉彬.基于卓越工程师培养的本科实践教学体系改革[J].实验室科学,2011,14(6):213-215.
[8] 江峰.地方院校机械工程类卓越工程师培养实验实践教学改革探究[J].高教学刊,2015(15):146-147.
[9] 孙月华,刘春生,曹贺,等.基于“卓越工程师”培养模式的归纳式教学方法研究[J].中国电力教育,2013(2):42-43,51.
[10] 吴元欣,王存文,喻发全,等.建设化工专业联盟 促进卓越工程师培养[J].实验技术与管理,2014,31(3):9-12.
[11] Sui Xiulin,Shao Junpeng,Duan Tiequn,et al. Exploration ontraining model of mechanical engineering excellence engineers[C]//The 3rd International Annual Conference on Teaching Management and Curriculum Construction,2012.
[12] 王志秀,张吉月,蓝波.电类专业电学基础技术课程改革与实践[J].实验室研究与探索,2014,33(5):179-183.
[13] 孔建益,邹光明,侯宇,等.卓越机械工程师培养的实践教学体系研究[J].高等工程教育,2013(3):18-21.
Reform and practice of hydraulic and pneumatic transmission experimental teaching
Sun Yuehua, Xu Peng, Liu Chunsheng, Liu Yuanlin
(School of Mechanical Engineering,Heilongjiang University of Science & technology,Harbin 150027,China)
The engineering practical teaching is one of the most important contents of the reform of excellent engineer plan. According to the requirements of “Excellent engineer education and training plan,” reforming hydraulic and pneumatic transmission experimental teaching contents on the basis of traditional experiment, this article increases the engineering application system design and simulation experiment. The experiment process and the simulation method are introduced in detail by taking the concrete engineering practice as an example. Through the reform of the contents, the students’ practical skills, innovatiability, and independent thinking and software application ability are improved,which can provide the guarantee for the smooth implementation of the project.
hydraulic and pneumatic transmission; rib tube automatic welding machine; experimental teaching; excellent engineer
10.16791/j.cnki.sjg.2016.10.031
2016-05-23
黑龙江省教育科学“十二五”规划备案课题(GBC1214062);2014年黑龙江科技大学教学研究项目(JY14-52)
孙月华(1965—),女,黑龙江哈尔滨,本科,教授,主要研究方向为机械设计及其理论、液压与气压传动.E-mail:1580774753@qq.com
TH137.9;TH138.9;G642.4
A
1002-4956(2016)10-0123-04
猜你喜欢
水电站机电技术(2024年2期)2024-02-28 06:55:08
新天地(2020年7期)2020-08-04 09:18:33
特别文摘(2018年10期)2018-12-24 10:03:04
制造技术与机床(2017年11期)2017-12-18 06:46:41
制造技术与机床(2017年2期)2017-05-04 04:17:22
电子制作(2016年19期)2016-08-24 07:49:48
重型机械(2016年1期)2016-03-01 03:42:11
焊接(2016年6期)2016-02-27 13:04:52
机电信息(2015年9期)2015-02-27 15:55:57
山东工业技术(2014年11期)2014-05-04 00:24:42