直流无刷电机控制实验系统设计与实现
2016-11-10 07:59:46张惠国潘启勇
实验技术与管理 2016年10期
张惠国, 钱 斌, 潘启勇, 顾 涵
(常熟理工学院 物理与电子工程学院, 江苏 常熟 215500)
直流无刷电机控制实验系统设计与实现
张惠国, 钱斌, 潘启勇, 顾涵
(常熟理工学院 物理与电子工程学院, 江苏 常熟215500)
针对现有电动车直流无刷电机控制系统电压高、功率大,不易被教学实验直接采用等不足,设计了一套低压、小电流的直流无刷电机控制系统,实现方波或正弦波控制,并重点以方波控制实现了软硬件系统,提出了相关实验方案。该实验系统将嵌入式系统、传感器、电机传动、自动化控制等有机融合,可作为学生的综合性实验平台、课程设计训练平台,学生创新实验项目实践平台。利用这实验平台,学生在巩固专业基础知识的同时,有效提高了动手能力和创新能力。
控制器; 实验系统; 直流无刷电机
为满足行业发展对人才的需求,各学校在新能源技术与工程专业学生的培养上做了大量的创新改革,改革的趋势是学生在掌握扎实理论基础的条件下,教育直接面向行业,学生获得行业急需的工程实践能力和技术水平[1-5]。随着行业发展和新技术的出现,原有的一些实验设备在学生动手能力培养上捉襟见肘,而且新能源科学与工程专业的培养方案,要求学生要有较好的物理、材料等的理论基础,又要有能源转换、传输、应用的技术实践能力。因此建设综合性创新实验平台,开设技术性强、学生可参与度高的实验系统非常必要。
直流无刷电机因效率高、噪音低、结构紧凑、可靠性高和维护成本低,被广泛用于各种新能源车辆及各种家电产品中。本文设计的BLDCM控制实验系统,直接以电动车辆为原型,具备电动车辆的基本功能;同时将电动车辆控制器中的各个功能分模块分区域设计,便于细化实验项目的开展;同时,控制实验系统采用24 V电压,控制系统直流母线的电流控制在2 A内,能有效防止大功率引起的安全、器件损坏等问题。软件设计方面,精心考虑了程序的流程框架,各个控制功能封装成不同函数表示,便于软硬件协同调试。实验系统能用于课堂实验、课程设计、创新性实验项目的开展。
1 实验系统结构
直流无刷电机控制系统主要根据市场上现有的电动车辆为原型、采用主流的带霍尔位置传感器的电机。控制系统具备基本的调速功能、前进后退功能、欠压保护、过压保护、过温保护、过流保护、短路保护等功能,并通过合适的软件处理,具备霍尔自修复、电子刹车等辅助性功能。同时,留有速度、电能、温度、故障指示等仪表显示人机接口。
图1是控制系统的框图,由电池、功率驱动电路、功率模块、电机、控制电路组成。功率模块由6个功率MOSFET管子(M1—M6)组成,功率模块为电机提供合适的功率;功率驱动电路接收来自微控制器的PWM输出信号,产生适合于功率MOSFET的半桥电路驱动信号;控制电路主要以微控制器为核心,接收各种传感器送来的电机位置(霍尔信号)、电流、电压、温度、速度、方向等信号,经过控制算法处理后产生实时变化的PWM控制信号,同时,输出相应的指示信号到仪表显示。

图1 直流无刷电机控制系统框图
目前在电动车辆控制中,常用的方法有方波控制方法和正弦波控制方法。这两种方法主要由微控制器的软件实现,外部硬件上主要体现在方波控制不需要采样相电流信号,而正弦波控制需要获取电机相线中两相相电流信号。实验系统设计时充分考虑了能兼容这两者方法,为处理方便,本文将三相电流和母线电流均采样输出,图1中的Iu,Iv,Iw对应相电流和Ib对应母线电流。
2 实验系统硬件设计
实验系统设计的核心在于控制器的设计,控制器主要包括供电部分、控制部分和功率部分,并留有外部人机接口控制,如速度、方向、仪表显示等接口。设计中,考虑学生实验的安全性及操作方便性,限制了电压、电流,供电电压限制在20~24 V,电流限制在2 A以下,并将控制系统和电机小型化,便于学生一人一套,以便取得更好的控制训练效果。设计中,将实验系统的各个功能部分分块设计,将电源、功率部分和控制部分采用一块PCB板完成设计。各个模块在PCB中有清晰的界面,并留有测试接口,便于实验时的测试。
2.1供电设计
实验系统的供电主要包括控制部分供电和功率部分供电,控制部分涉及微控制器、各种比较放大器以及速度控制、电机位置传感器等的供电,电压分为5 V和3.3 V两种;功率部分包括电机的供电电压即直流母线电压为24 V,功率驱动为15 V电压。整个实验系统采用可调的开关电源供电,模拟实际车辆的电池,直流母线电压直接由外部开关电源供给。其他的电压由24 V电压变换而来。
电源部分的设计采用非隔离的降压变换器,如图2所示。其中,KEY端受电门锁开关控制,电门锁打开时,电源通过限流电阻R1给后级直流降压电路供电,限流电阻限制了电源开启时给电解电容C1等后级充电引起的瞬间电流冲击。直流降压电路主要包括开关管Q1、输出滤波电感L1、输出电容C3及续流二极管D2;而R6,R7、稳压管D3、三极管Q3、Q2作为电压反馈、控制开关管Q1的开关,输出电压可以稳定在15 V。3.3 V和5 V的电压从15 V变换得到,采用三端稳压器件如HT7550,HT7533等。同时,为滤除一些高频干扰,在15 V、5 V和3.3 V输出端均设置100 nf的小电容进行滤波,如C4、C7、C9。
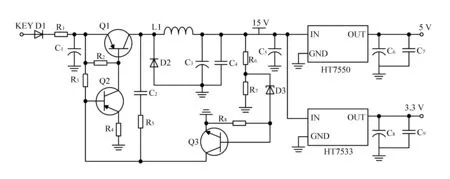
图2 电源变换电路
2.2功率部分设计
功率电路由3个半桥电路组成,图3给出了其中一相的功率电路,其他两相电路类似。图3中M1为功率MOSFET上管,其漏极接母线电源,源极U接电机相线;M2为功率下管。电路中的电阻R1和R3电阻为栅极电阻,C1和C2为栅极滤波电容,两者用于栅极的滤波,应尽量靠近功率管栅极,可有效防止栅极驱动振荡引起的功率管失效损坏。R2和R4是接在栅极和源极间的放电电阻,在闲置时会将栅极电荷泄放,防止启动时栅极存有电荷而对半桥功率管产生冲击。电阻R5主要用于给功率管自举电容预充电提供通路。RS1是相电流采样电阻,当相电流通过时,其上产生小电压Uu,经放大后提供给微控制器端的模数转换电路,采集的相电流信号主要用于正弦波控制算法。RS4为母线电流采样电阻,其上产生小电压信号Ub,经过整流放大后用于系统限定母线电流等。另外,为防止大电流工作时造成母线电压的不稳定,设计时在母线电压和地接了较大容量的电解电容。
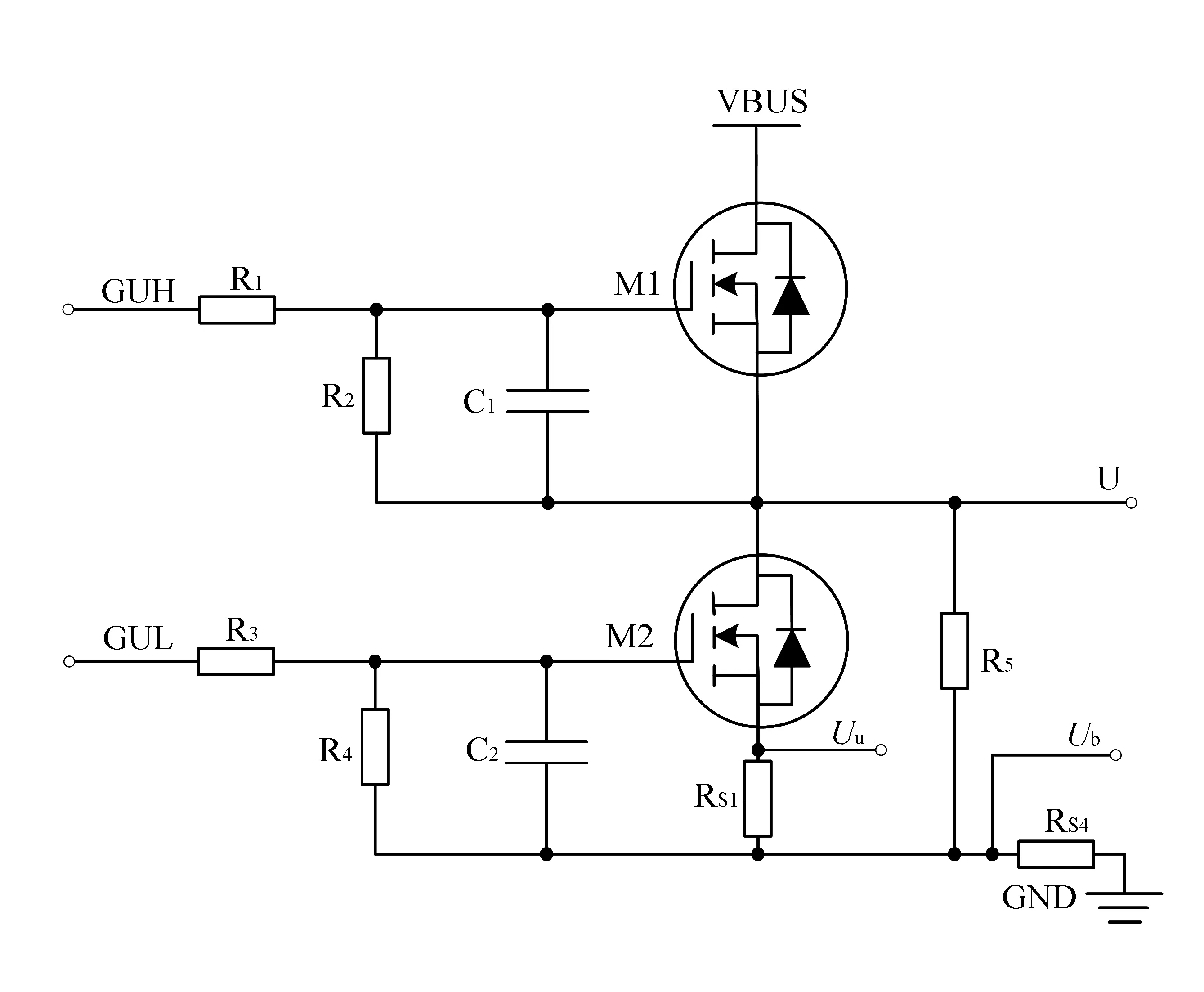
图3 功率电路
半桥电路的驱动需要处理好上半桥的功率管的驱动,因上半桥的功率管源极接电机的相线,在运行过程中相线的电压是浮动的,导致源极电压也是浮动变化的,为保证上半桥功率管有效导通,可在设计中采用自举电路,使得相线电压浮动时栅极电压也变动以保证上管能有效开启。驱动电路可采用分立三极管搭建,也可采用专用的半桥驱动电路完成。本文在设计中采用了国际整流公司(IR)的IR2101s芯片,并选择了合适的驱动电阻和自举电容,保证功率管能在1 μs内完全开启。
2.3控制部分设计
控制电路的设计主要围绕微控制器展开,设计中采用了STM32F030C8芯片,采用48引脚薄型四方扁平封装,供电电压是3.3 V。控制器主要接收来自传感器或检测电路的信号,如加速、方向、温度、电流、电压、霍尔等信号,然后根据这些信号完成栅极驱动信号及仪表信号的产生。设计中微控制器用到的引脚和对应的端口和信号名等见表1。
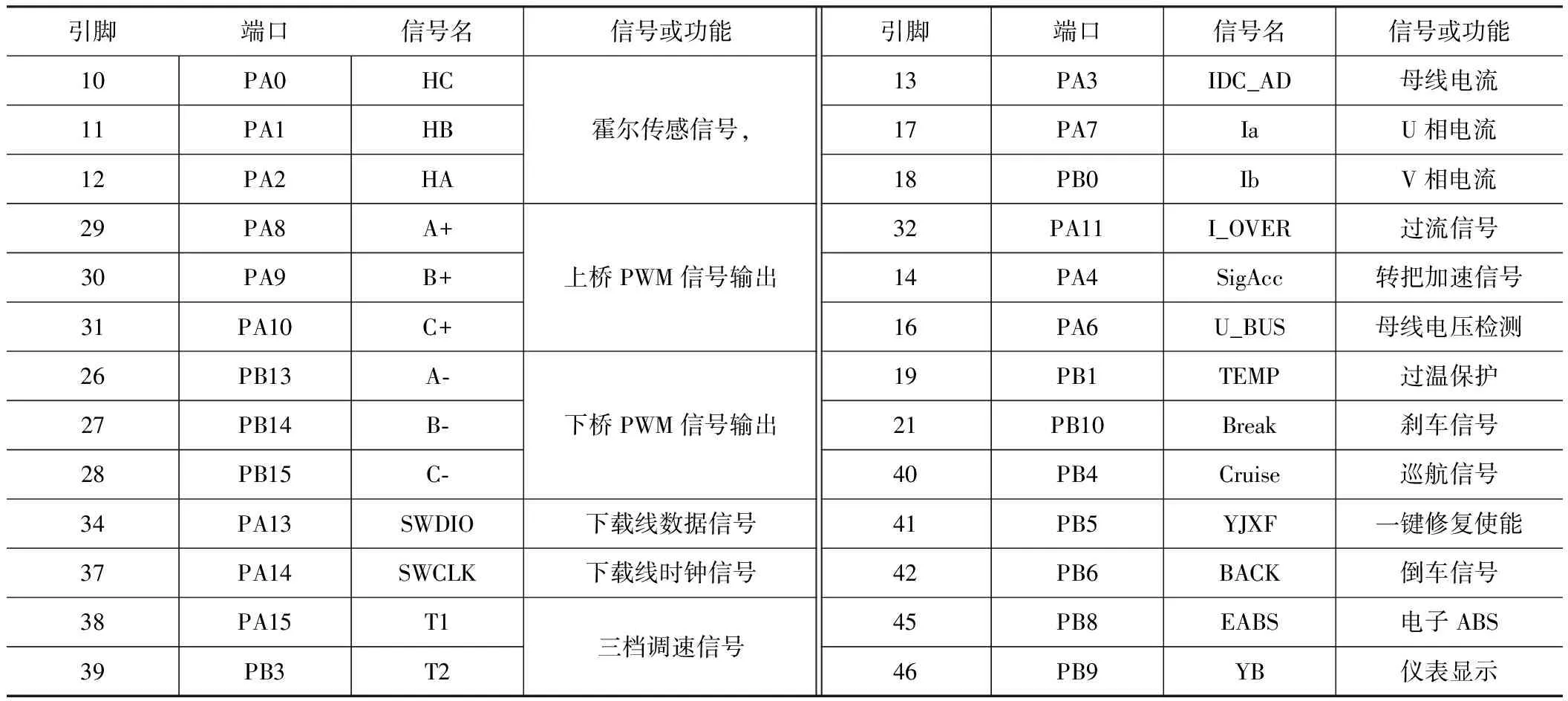
表1 主要引脚分配
微控制器程序的烧写采用SWD的下载调试方式,采用电源、地、数字、时钟4根线。电机输出的霍尔位置信号高电平为5 V,在微控制器接收时需要采用电阻分压,并滤除干扰信号。微控制器采集时,利用基本定时器的捕获功能,在霍尔跳变时触发定时器中断,从中获取电机的速度信息,进行相应的磁链和转矩运算。功率管的栅极驱动PWM信号则利用微控制器的高级定时器完成,上下桥信号采用同一通道互补输出。电流、电压、温度信号则通过传感器输出处理后直接接到微控制器芯片的模数转换输入端;三档调速、倒车、刹车、巡航、电子ABS等则采用高低电平直接指示动作;仪表显示则通过串行通信协议传出速度、温度、故障、剩余电压等信息。
2.4控制板设计
设计控制板时,根据图1所示的原理框图,将控制系统分模块进行设计,控制板实物图见图4。控制板分成电源电路、功率电路、驱动电路、控制电路等部分,其中控制电路部分又分为输入输出接口、下载接口、微控制器电路、信号放大滤波部分。我们在电源电路、控制电路、驱动电路输出部分、以及功率电路输入处预留了测试点,用于实验中信号的测试和观测。

图4 控制板实物图
3 实验系统软件设计
基于上述设计的实验板,可进行市场上主流的电动车控制方法实验,或是采用方波控制方法[6-8],或是采用正弦波控制方法[9-12]。方波控制相对简单,容易调试,我们在实验中主要采用方波控制方法。在完成电机运行的基础上,添加了较多辅助功能的软件调试部分,如霍尔自修复、三档调速、倒车、防溜坡、巡航、电子刹车、电子防抱死(EABS)、堵转保护、欠压/过压保护、过温保护等,使实验系统的功能和电动车行业的控制方法保持同步。
软件代码编写中,利用状态表征软件的执行阶段,程序在CHECK、IDLE、INIT、RUN、STOP、FAULT、EABS_START、EABS_END等状态间切换、将微处理器系统时钟处理状态SYSTICK、外部中断状态设成优先级较高的运行状态,可以介入各个状态的执行,各状态的跳转关系见图5。程序的主体框架为一个无限循环,在循环中利用条件分支语句确定各个状态的跳转。

图5 系统状态转移图
初始化流程负责各种定时器、模数转换、存储器直接存取、外部中断等的设定,以及完成一些全局变量的初始化。CHECK状态主要完成转把加速器状态的检测,若有故障则停留在CHECK状态,转把正确则进入IDLE状态。IDLE状态完成母线电压等常规检测,检测通过后进入INIT状态;INIT状态完成霍尔状态读取,使能定时器后进入RUN状态。RUN状态完成转把速度信号的读取,并在高级定时器中断时完成换相和PWM占空比的设定,同时实时检测母线电压;当检测到转把信号值较小时,或电机速度接近停止时,就进入STOP状态。STOP状态负责关掉高级定时器,并做一些清零动作,然后进入IDLE状态。在主体循环运行的同时,微控制器还独立并行运行着系统时钟、外部中断以及定时器中断,这些中断负责检测故障情况的发生以及紧急情况下进入EABS状态,以及进入故障状态FAULT。故障状态恢复后重新回到CHECK状态。
4 实验系统实验项目安排
实验系统依据主流的电动车功能为原型,能完成各种车辆相关的软硬件功能实验。设计中,将实验系统的最大电压设定在24 V,最大母线电流设定在2 A以下,系统中可配备直流电压源、示波器、温度探头、转把、直流无刷小电机,组成一套可控的调速系统,基本的系统实物图见图6。
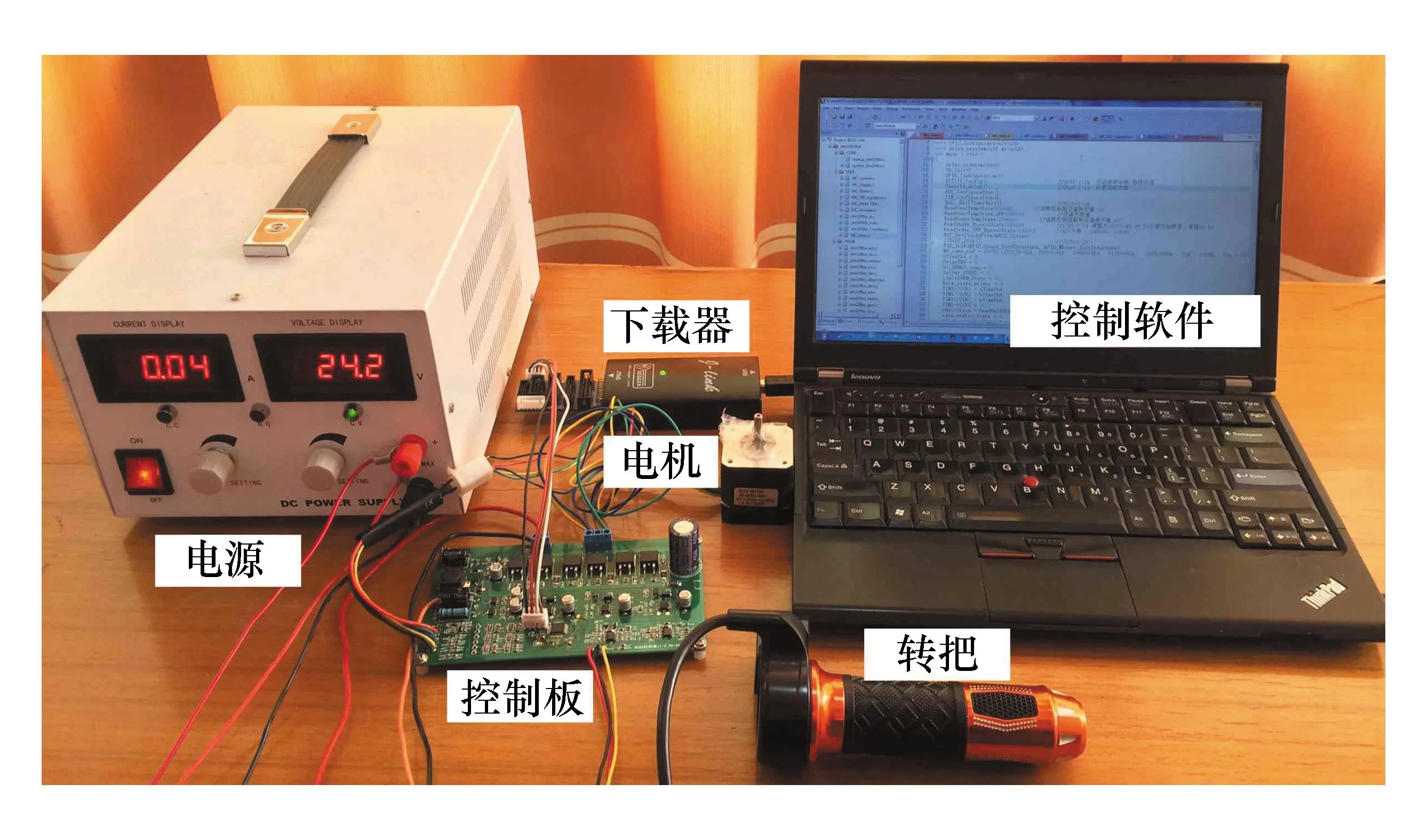
图6 实验系统实物图
根据设计的实验系统,将实验分成了硬件和软件两大部分,硬件主要训练学生的硬件认知、贴片焊接、直流电源变换设计、功率驱动设计、信号放大滤波设计、故障检测分析等几个方面;软件主要包括程序控制流程、速度环控制、母线限流、欠压保护、霍尔修复、防溜坡等功能设计和测试等。
5 结语
针对新能源工程与技术专业的新能源汽车方向课程,进行了相关的车辆控制实验系统设计。实验系统以市场上的电动车为原型,自主设计了控制器,开发了带各项辅助功能的控制软件,整套系统按照模块化的原则设计,结构清晰、成本较低。利用这套实验系统,能开设课堂实验、课程设计、创新训练、毕业设计等各个层次训练项目,达到应用型专业的教学实践目的,学生在实验中得到了较好的训练,但也存在着一些问题,学生在做实验时花的时间较多,有的实验项目难度较大,后续需要进一步细化实验项目,并从硬件上放大实验系统,让学生更易操作。
References)
[1] 卢佃清,李新华,蔡立,等. 应用型本科院校新能源科学与工程专业实验室建设的探索与实践[J]. 实验技术与管理,2014,31(12):226-229.
[2] 姚志树,周云龙,胡国文,等. 电气与新能源综合实验教学中心建设探究[J]. 实验室研究与探索,2015,34(11):140-144.[3] 李淼林. 新能源汽车课程教学改革与探索[J]. 中国现代教育装备,2015(3):70-72.
[4] 李友才,郏国中,杨宗田,等. 《新能源汽车技术》课程教学模式和方法的研究与探索[J]. 教育教学论坛,2013(43):216-217.
[5] 邹政耀. 《新能源汽车技术》课程设计性实验的研究[J]. 教育教学论坛,2011(26):91-92.
[6] 李家庆,李芳,叶文. 无刷直流电机控制应用:基于STM8S系列单片机[M].北京:北京航空航天大学出版社,2014:195-200.
[7] 张著洪,苏显方,李建. 方波型无刷直流电机的电压跟踪控制策略[J]. 测控技术,2008,27(12):42-45.
[8] 张著洪,苏显方. 方波型无刷直流电机位置跟踪控制研究[J]. 贵州大学学报:自然科学版,2008,25(2):144-150.
[9] 江皓,杜鹏英,任国海. 模块化的无刷直流电机PWM调速实验系统[J]. 实验技术与管理,2007,24(9):53-56.
[10] 鄢志丹,吴光韬,王田农,等. 永磁同步电机测控实验系统设计与实现[J]. 实验室研究与探索,2015,34(11):42-45,59.
[11] 解洪超,于海生. 永磁同步电机调速系统的实现与实验研究[J]. 青岛大学学报:工程技术版,2015,30(2):1-6.
[12] 陈铁铮,颜钢锋. 基于有无位置传感器的无刷直流电机双模控制器设计[J]. 电机与控制应用,2011,38(2):32-36,53.
Design and realization of experimental system for controlling brushless direct current motor
Zhang Huiguo, Qian Bin, Pan Qiyong, Gu Han
(School of Physics and Electronic Engineering,Changshu Institute of Technology, Changshu 215500, China)
As the blushless direct current motor(BLDCM) control system for vehicle on market is hard to use directly in the experiments in class for high voltage and large power,a low voltage and small current BLDCM control system with either PWM control or sine wave control is designed for experimental purpose. The experimental system is realized with the PWM control method,and the experimental scheme is proposed based on the system. The designed experimental system has integrated multiple technology such as embeded system design,sensor application,motor drive,and automatic control. It could be a comprehensive experimental platform for experiments in class,curriculum design,and innovative experiment project practice.With this system,students can consolidate their basic knowledge and improve the pratical ability and innovative ability to meet the industry demands.
controller; experimental system; BLDCM
10.16791/j.cnki.sjg.2016.10.020
2016-05-16
教育部留学回国人员科研启动基金项目“电力电子装置实时仿真研究”(第48 批);教育部“十二五”本科专业综合改革试点项目;江苏省重点专业类(能源动力类)建设项目;江苏省高校品牌专业建设工程一期建设项目(PPZy2015A030);江苏省2014 年中高等职业教育衔接课程体系建设课题(201431)
张惠国(1978—),男,江苏常熟,博士,副教授,主要研究方向为功率器件及应用、集成电路设计
钱斌(1973—),江苏常熟,博士,教授,研究方向为新能源技术.E-mail:njqb@cslg.edu.cn
TM 301.2;G642.423
A
1002-4956(2016)10-0076-05
猜你喜欢
中学生数理化·八年级物理人教版(2022年6期)2022-06-05 06:55:38
中学生数理化·八年级物理人教版(2022年6期)2022-06-05 06:55:32
中学生数理化·八年级物理人教版(2022年6期)2022-06-05 06:55:30
防爆电机(2021年3期)2021-07-21 08:13:00
防爆电机(2021年1期)2021-03-29 03:02:52
电机与控制应用(2021年12期)2021-02-28 07:55:22
中学生数理化·八年级物理人教版(2019年6期)2019-06-25 01:00:18
电子制作(2017年14期)2017-12-18 07:07:58
能源(2016年2期)2016-12-01 05:10:31
单片机与嵌入式系统应用(2014年8期)2014-03-23 23:18:21