
某型特种车辆蛇形驾驶工况侧倾稳定性仿真研究
2016-11-10 07:38王全姜乐华高经纬
汽车实用技术 2016年9期
王全,姜乐华,高经纬
(国防科学技术大学交通运输工程系,湖南 长沙 410072)
某型特种车辆蛇形驾驶工况侧倾稳定性仿真研究
王全,姜乐华,高经纬
(国防科学技术大学交通运输工程系,湖南 长沙 410072)
∶针对某型特种车辆蛇在形驾驶工况下容易发生侧翻的问题,基于ADAMS软件建立了魔术公式轮胎模型和整车虚拟样机模型,并进行了不同速度和方向盘转角下的蛇形驾驶仿真试验;选取横向载荷转移率作为侧倾稳定性评价指标并对其进行修正,获得评价效果更好的横向载荷转移率;利用优化后的评价指标求得研究对象蛇形驾驶工况下的侧翻预警阈值。仿真结果表明:相同的方向盘转角,速度增大,车辆侧倾稳定性变差;相同的行驶速度,方向盘转角增大,车辆更容易发生侧翻。
∶蛇形驾驶;ADAMS;仿真试验;横向载荷转移率;速度;方向盘转角
10.16638/j.cnki.1671-7988.2016.09.039
LC NO.: U467.1+1Document Code: AArticle ID: 1671-7988 (2016)09-103-05
引言
车辆侧翻是指车辆在行驶过程中绕其纵轴线转动90。或更大的角度以致车身与地面相接触的一种极其危险的侧向运动[1],一般分为两种形式:①侧向加速度超过一定限值,使得内侧车轮的垂直反力为零而引起的侧翻;②车辆行驶时产生侧向滑移与路面上的障碍物发生侧向撞击,被其绊倒而发生的侧翻[2]。美国高速公路交通安全管理局对车辆事故进行的统计数据显示,尽管车辆侧翻事故率不高,但是产生的危害程度仅次于碰撞事故,居第二位[3]。
车辆侧倾稳定性主要包括两个方面:静态侧倾稳定性和动态侧倾稳定性。其中,静态侧倾稳定性评价方法有三种[4]:静态稳定因子法,侧拉比例系数法和侧倾比例系数法;动态侧倾稳定性评价方法也有三种:理论分析法,计算机模拟仿真法和实车试验法。计算机模拟仿真法和实车试验法都是基于典型行驶工况下车辆的响应判断其行驶状态,包括蛇形驾驶工况、双移线工况、稳态转向工况等;其中,蛇形驾驶是主要用于评估车辆过渡响应和侧倾稳定性的工况[5],该工况模拟车辆在某一方向转向情况下向反方向急打方向盘避障行驶,由于侧向加速度方向和大小的突变,车辆极易发生剧烈横摆和侧翻;蛇形驾驶工况下侧倾稳定性良好的车辆,在其他工况下一般也具有极好的侧倾稳定性。本文研究对象是应用于特殊用途的特种车辆,无法进行实车试验;而且在实际车辆侧倾稳定性的研究中,相比较于计算机仿真分析方法,实车侧翻试验具有很高的经济成本、较大的危险性以及严格的试验条件[6]。综上,本文采用计算机仿真分析方法。
1、车辆侧倾机理及侧倾稳定性评价指标
1.1车辆侧倾机理
首先对某型特种车辆侧倾稳定机理进行分析研究,图1即为某型特种车辆稳态下的侧倾模型[7]:
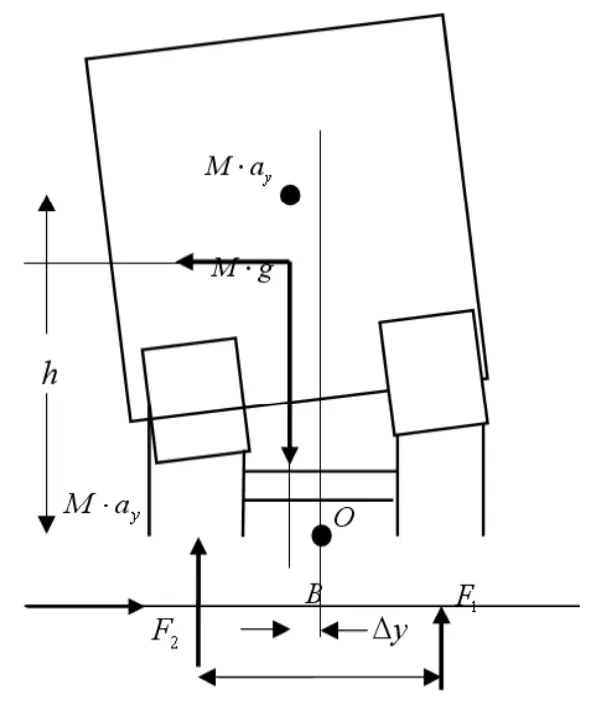
图1 某型特种车辆稳态下的侧倾模型
其中:ay是质心处侧向加速度,h是质心高度,M是整车质量,B是轮距,∆y是质心相对于轮距中心的偏移量,F1和F2是两侧车轮的垂直反力。
对车辆轮距中心O取矩,可以得到如下平衡方程:

从公式(1)中可以看出,车辆受到两个侧倾力矩,一个是车辆所受侧向力引起的,大小是M·ay·h,另一个是由于车辆质心偏移引起的,大小是M·g·△y;与这两个力矩平衡的是稳定力矩(F2-F1) ·B/2,是载荷在两侧车轮之间发生横向转移引起的。当公式两边相等时,车辆正常行驶,当左边大于右边时,车身将发生倾斜,车辆载荷从一侧转移到另一侧,极限工况是F1=0,右边达到最大值M·g·B/2,车辆即将发生侧翻。
1.2车辆侧倾稳定性评价指标
车辆常用的侧倾稳定性评价指标有以下三种[8]:
(1)车身侧倾角是车辆侧倾状态的最直接的变化量。当车身侧倾角超过极限值时,车辆就会发生侧翻;一般以静态侧翻试验测定车辆最大侧倾稳定角。车辆的静态最大侧倾稳定角越大,车辆侧倾稳定性越好。
(2)侧向加速度值,以单位重力加速度表示[9];试验数据表明,大多数乘用车的侧翻阈值都在lg以上,轻型卡车、货车及越野车的侧翻阈值在0.89g到1.29g范围之内,重型运输车的侧翻阈值通常在0.59g以下。
(3)车辆发生侧倾时,造成左右车轮中一侧载荷增加,另一侧载荷减少的现象,称为由侧倾引起的载荷转移。横向载荷转移率定义为右(左)侧轮胎垂向载荷与左(右)侧轮胎垂向载荷的差,与左右轮胎垂向载荷总和的比值的绝对值[10]:

式中:F1是内侧车轮的垂直载荷;F2是外侧车轮的垂直载荷。
标准横向载荷转移率介于0到1之间,数值越小越稳定,数值为0时两侧载荷相等;数值为1时,载荷完全转移到一侧,车辆即将发生侧翻。
2、基于ADAMS的整车虚拟样机模型的建立
ADAMS是由美国MDI公司开发的集建模、求解、可视化技术于一体的虚拟样机软件,是目前世界上使用最多的机械系统仿真分析软件;其中,ADAMS/Car模块集成了多家著名车企在汽车设计、开发等方面的经验,是一种基于模板的建模和仿真工具,大大加速和简化了建模的步骤[11]。本文整车虚拟样机仿真模型是基于ADAMS/Car模块建立的。
2.1整车虚拟样机模型的建立
(1)在Template buider界面中建立各子系统的template文件,同时建立子系统中各部件约束关系和子系统之间的communicator;
(2)在Standard界面下建立各子系统的subsystem文件;
(3)在Standard界面下建立整车assembly文件,装配各子系统组成整车模型。
整车参数如表1所示:
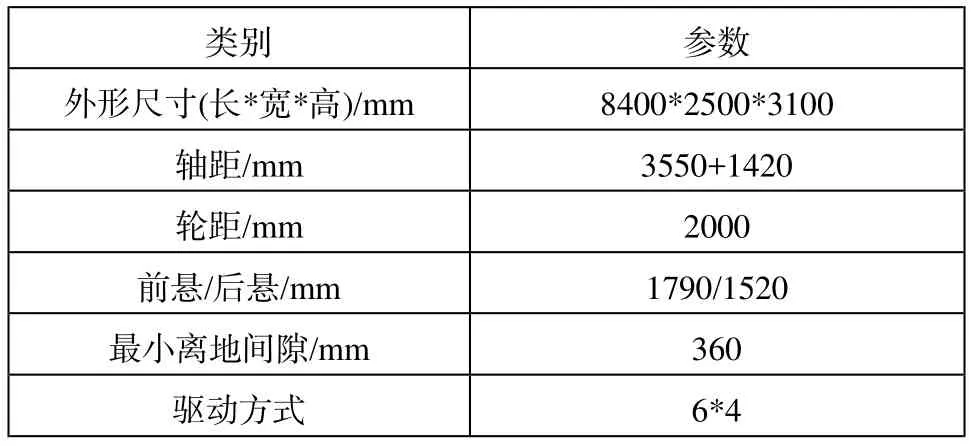
表1 整车参数
在ADAMS/Car中建立的研究对象整车虚拟样机模型,共包括10个子系统,147个构件总计447个自由度。整车ADAMS虚拟样机模型如下图2所示:

图2 整车ADAMS虚拟样机模型
3、蛇形驾驶侧倾稳定性仿真试验
3.1侧倾稳定性评价指标的选取与优化
3.1.1侧倾稳定性评价指标的选取
由于体育教师在高校篮球发展的过程中起着非常关键的作用,因此,高校应该加强培训工作,提升他们的专业技能和综合素质,确保他们能够为篮球运动的发展提供帮助。由于本身具备了比较强的理论知识,但是在实践操作能力上比较缺乏,因此,应该结合各方面的资源推送到实践中进行训练,确保他们能够获得更多的实践性知识,可以帮助学生在体育课上得到更好的吸收。同时,还要加强对体育教师的长久性培训工作和继续教育工作,在有条件的情况之下,还可以输送他们到相应的省队中参加学习,确保他们本身具备较强的教育教学能力,可以提高高校篮球的发展。
在车辆参数确定的情况下,对其侧倾稳定性影响最大的因素是行驶速度和方向盘转角。本文做了多组仿真试验,仿真轨迹如图3所示,试验条件及试验结果如表2所示:
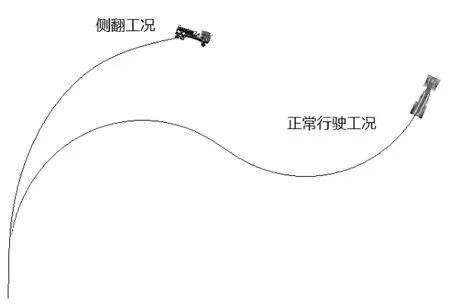
图3 蛇形驾驶仿真轨迹
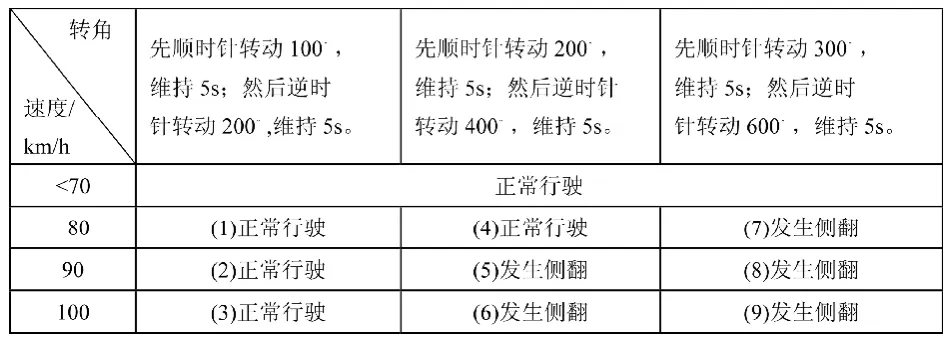
表2 蛇形驾驶工况仿真试验条件及试验结果
从表2可以看出,有5组仿真试验发生了侧翻;提取(7):(9)组试验结果曲线如图4所示。
从图4可以看出,三种条件下车辆都发生了侧翻,其中80km/h和100km/h速度下车辆还发生了滚翻。车身侧倾角、侧向加速度和横向载荷转移率三个指标都可以直观地表征车辆状态的变化,但是从图4(a)、4(b)可以看出,车身侧倾角和侧向加速度随车辆侧翻急剧增大,远远超过理论值所允许的极限值,因而变化曲线并不能直观反映车辆侧翻临界值;但是图4(c)所示横向载荷转移率却可以准确反映车辆侧翻临界值(根据其定义,1即为侧翻临界值)以及达到临界值的时间,故本文选择横向载荷转移率作为研究对象侧倾稳定性评价指标。
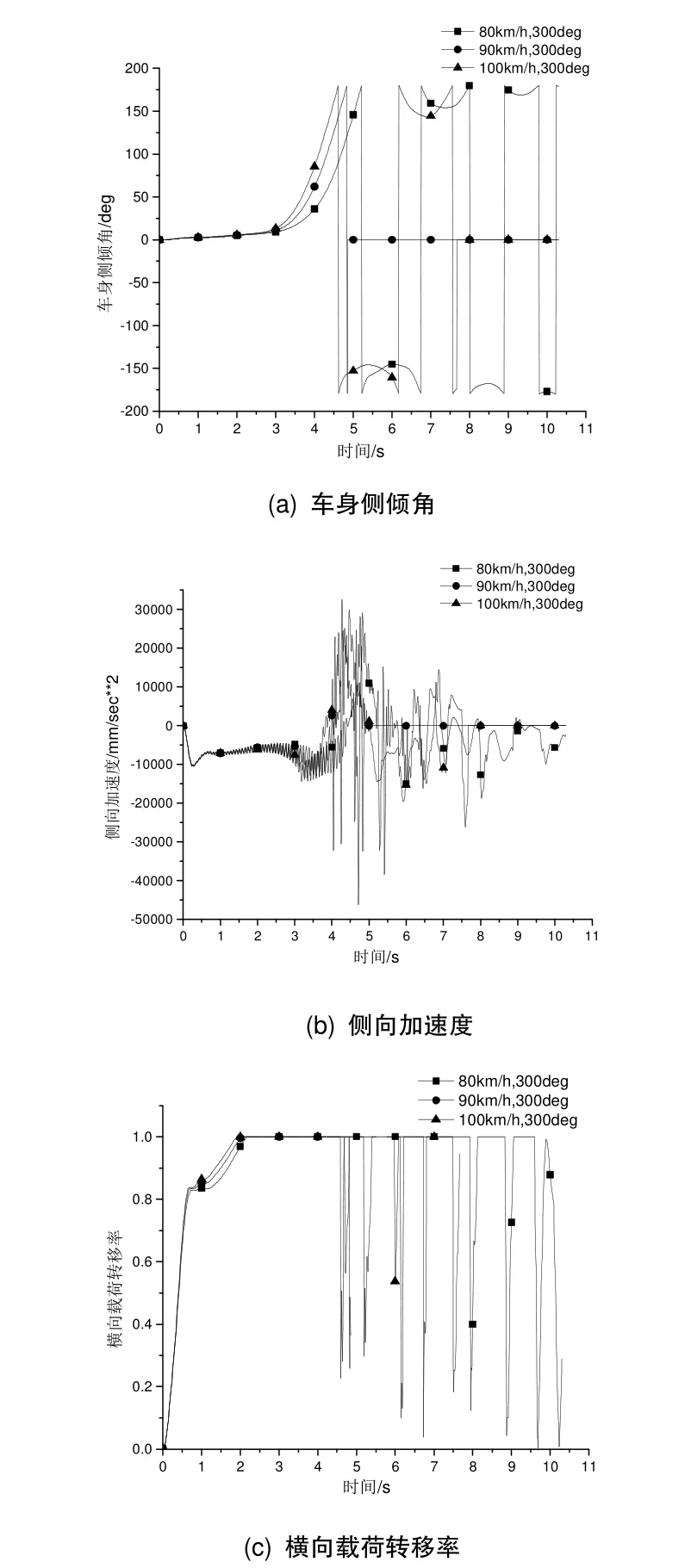
图4 侧翻工况中研究对象的响应曲线图
3.1.2侧倾稳定性评价指标的优化
过去的研究中,认为三个车轴是同时侧翻的,这样计算出的整车横向载荷转移率没有考虑不同车轴的差异。本文在仿真分析中发现,车辆在侧翻过程中,各车轴一般情况下并不是同时侧翻,即同一侧的车轮并不是同时离开地面。第(7)组试验结果如右图5所示:
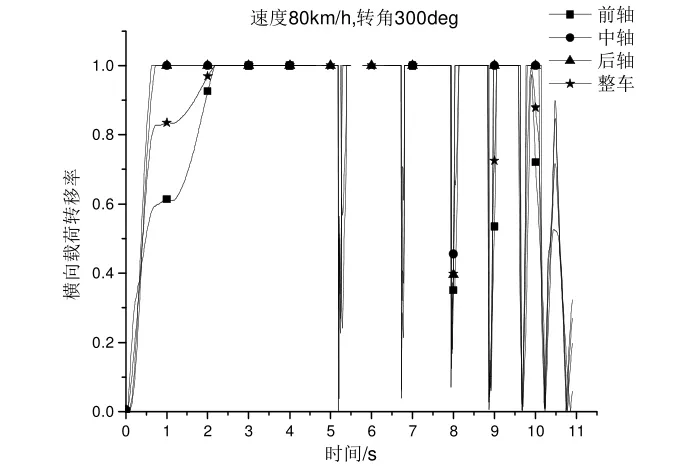
图5 侧翻工况下各轴横向载荷转移率变化
从图5可以看出,中轴和后轴明显比前轴提前达到侧翻阈值,如果三个轴以相同的权重值代入整车横向载荷转移率的计算显然是不恰当的;故本文引入修正系数a,b和c,在整车横向载荷转移率的计算中赋予三个轴不同的权重;由图5知,后轴横向载荷转移率达到1时,中轴为0.9,前轴只有0.6,故取:a:b:c=1:0.9:0.6=0.4:0.36:0.24,修正前的整车横向载荷转移率计算式为:
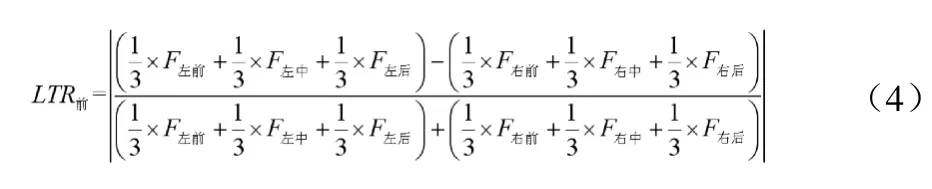
修正后的整车横向载荷转移率计算式为:

第(7)组试验工况下,修正前后横向载荷转移率对比如下图6所示:
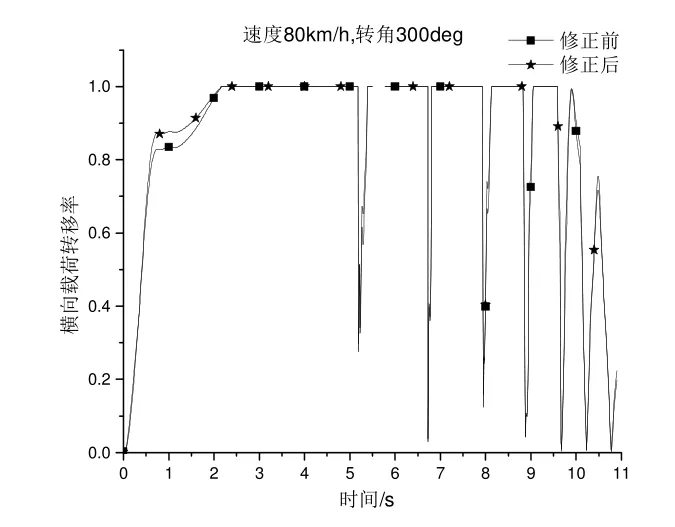
图6 修正前后横向载荷转移率对比
从图6可以看出,修正后的横向载荷转移率与修正前相比,曲线增长较快,它的意义在于:车辆侧翻预警研究中,考虑到从接收到预警信号到防侧翻执行器起作用会有一段时间延迟,故侧翻预警阈值的选取不是极值1,而是0.9或更小的值,较早的预警意味着更长的防侧翻控制反应时间;如果驾驶员能提前得知车辆的侧倾稳定状态,就能有效避免车辆侧翻现象的发生[12]。修正后的横向载荷转移率曲线在0.8以后比修正前增长快,将提前达到预警阈值,从而比修正前获得更长的预警时间,由此证明修正后的横向载荷转移率优于修正前的横向载荷转移率。
3.2蛇形驾驶工况下预警阈值及极限行驶条件的确定
3.2.1蛇形驾驶工况下预警阈值的确定
本文研究对象质心较低,故在低速下具有较好侧倾稳定性,仿真试验结果(表2)也证明了这一点;当车速大于80km/h时,车辆将不能保持良好的抗侧翻性能,侧翻工况下修正后的整车横向载荷转移率如图7所示。
从图7可以看出,车辆在高速蛇形驾驶工况下,从稳态到侧翻只经历了2s左右的时间;而在一般的侧翻预警操作中,驾驶员接到侧翻预警信息的反应时间T0一般为0.4s:1.5s,该值与驾驶员反应快慢和驾驶环境有关;之后从加速踏板移动到制动踏板所需时间T1与消除制动间隙所需时间T2之和一般为0.2s:0.5s,还要考虑车辆施加制动力时间与车辆惯性、预警算法时间等,整个过程需要3s左右[13],显然不能满足预警要求;故采用主动防侧翻控制措施,由传感器检测车辆状态,横向载荷转移率达到预警阈值时触发防侧翻控制系统,此时预警时间只需考虑上述时间T1+T2,以及车辆施加制动力时间与车辆惯性、预警算法时间等,整个过程只需要1s。据此可以求得上述几种工况下侧翻预警阈值如表3所示。
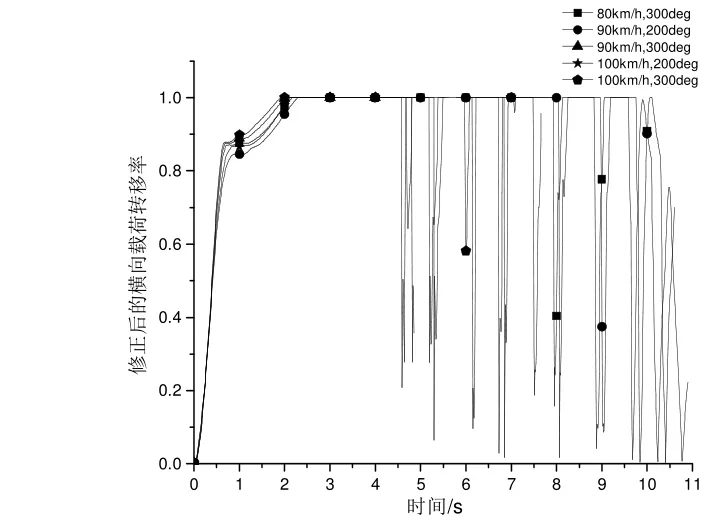
图7 侧翻工况下横向载荷转移率曲线
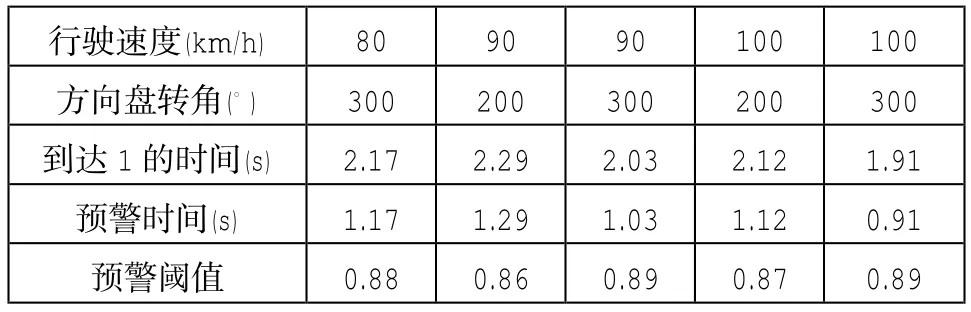
表3 侧翻工况预警阈值
表3给出了研究对象在蛇形驾驶工况下,应用主动防侧翻预警和控制措施时的预警阈值,可以看出,阈值介于0.86:0.89之间,故当以横向载荷转移率作为侧倾稳定性评价指标时,可以确定0.85作为该特种车辆蛇形驾驶工况下的防侧翻控制预警阈值。
3.2.2蛇形驾驶工况极限行驶条件及大角度侧倾危险预警条件的确定
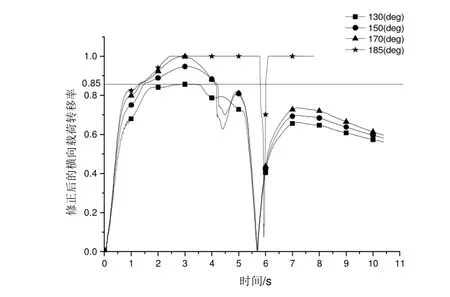
图8 90km/h速度不同转角下修正后的横向载荷转移率曲线
上述分析可知,研究对象低速蛇形驾驶工况侧倾稳定性较好,高速下抗侧翻性能较差,本文通过进一步仿真分析,获得该特种车辆蛇形驾驶工况下,能保持正常行驶的极限速度和方向盘转角;同时,由上文分析可知,在蛇形驾驶工况中,当车辆横向载荷转移率最大值达到0.85,应先于主动防侧翻预警触发大角度侧倾危险预警,提醒驾驶员继续加速或者增大转角将使车辆进入极限驾驶工况,该预警通过直接检测车辆行驶速度和方向盘转角,超过预警值即向驾驶员报警;大角度侧倾危险预警条件的确定如下图8所示。
如图8所示,速度条件一定,通过仿真逐步逼近横向载荷转移率值为0.85时的方向盘转角,此转角即为大角度侧倾危险预警条件值;同理可以得到其他速度条件下的预警值。研究对象蛇形驾驶工况下的极限行驶条件及大角度侧倾危险预警条件如下图9所示:
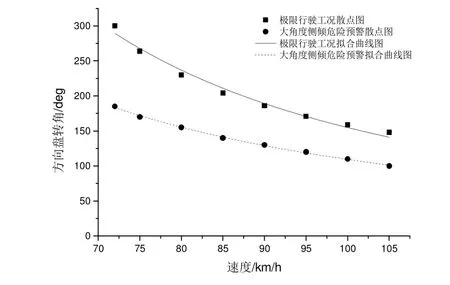
图9 蛇形驾驶工况极限行驶条件及大角度侧倾危险预警条件曲线图
如图9所示,由于车辆结构方面的原因,经仿真实验分析,在0:70km/h的速度条件下,研究对象具有较好的侧倾稳定性,且方向盘转角增大对不会仿真结果影响较小;该特种车辆是一种重型车辆,实际行驶速度一般不会大于100km/h;基于以上研究结论可知,在蛇形驾驶工况下,图9所示极限行驶工况拟合曲线是侧翻临界曲线,大角度侧倾危险预警拟合曲线是防侧翻安全警戒线;极限行驶工况拟合曲线上方的区域表示车辆一定会发生侧翻的工况,车辆状态处于两条曲线之间时,虽不会发生侧翻,但车身会剧烈横摆、倾斜,有侧翻危险,大角度侧倾危险预警拟合曲线下方是安全行驶区域,不会发生侧翻。
4、结论
本文首先从理论上分析了研究对象的侧翻机理,然后基于ADAMS建立了轮胎模型和整车虚拟样机多体动力学模型,并进行了蛇形驾驶工况侧倾稳定性仿真试验,得到以下结论:
(1)研究对象在方向盘转角相同的条件下,车速越大,车辆侧倾稳定性越差;在速度相同的条件下,方向盘转角越大,车辆越容易发生侧翻;
(2)考虑了研究对象不同车轴抗侧翻能力不同的问题,通过赋予不同车轴不同的权重值所得到的修正横向载荷转移率比传统算法结果更接近工程实际;
(3)利用修正后的横向载荷转移率,得到的蛇形驾驶极限行驶条件、侧翻预警阈值以及大角度侧倾危险预警条件;其中,大角度侧倾危险预警条件先于侧翻预警阈值起作用,两者分别通过驾驶员和主动预警系统控制车辆,相当于对危险工况具备双重预警机制,既较真实客观地反映出研究对象的侧倾稳定性能,又为该特种车辆后续防侧翻预警控制系统的开发奠定了基础。
[1] 徐延海.基于主动转向技术的汽车防侧翻控制的研究[J].汽车工程,2005(5):518-521.
[2] 王宏雁,董文灏.客车侧翻的运动学分析[J].交通科学与工程,2012,28(3):60-66.
[3] Linda J, Anne M, John W. Trucks involved in fatal accidents fact -book 2007[R].Ann Arbor:The University of Michigan Transporta -tion Research Institute,2010.
[4] 吴新烨.客车侧倾稳定性及侧翻安全性研究[D].厦门:厦门大学,2013.
[5] 陈军.MSC.ADAMS技术与工程分析实例[M].北京:中国水利水电出版社,2010.
[6] 徐洪国.汽车列车横向稳定性研究[J].公路交通科技,2006, 23(2):141-150.
[7] 娄源停.重型商用车防侧翻控制策略的研究[D].长春:长春工业大学,2014.
[8] MJL Boada,BL Boada,AG Babe,et al. Active roll control using reinforcement learning for a single unit heavy vehicle[J].Intern -ational Journal of Heavy Vehicle Systems,2009,16(4):412-430.
[9] 余志生.汽车理论[M].北京:机械工业出版社,2009.
[10] 张不扬,宗长富,王德平.车辆侧翻预警研究现状与关键技术.汽车技术,2010,8:27-30.
[11] 熊驰.基于ADAMS的多轴重型车辆侧倾稳定性研究[D].重庆:重庆交通大学,2014.
[12] 糜沛纹,宗长富,赵汉卿.基于自适应卡尔曼滤波的商用车横向载荷转移率估计[J].汽车技术,2013(8):19-23.
[13] 朱天军.基于改进TTR重型车辆侧翻预警及多目标稳定性控制算法研究[D].长春:吉林大学,2010.
A Type of Special Vehicle Serpentine Driving Conditions Roll Stability
Simulation Research
Wang Quan, Jiang Lehua, Gao Jingwei
(Department of Traffic & Transportation Engineering, National University of Defense Technology, Hunan Changsha 410072)
Aiming at the problem that a special vehicle easy to turn on it's side under serpentine driving conditions, built the magic formula tire model and vehicle virtual prototype model based on ADAMS software, and carried out serpentine driving condition simulation test under different speed and steering angle used the whole vehicle model; Selected the lateral load transfer rate as the roll stability evaluation index and modified it, gained better evaluation of lateral load transfer rate; Using the optimized evaluation index obtained the rollover warning thresholds under the serpentine driving conditions. The simulation results showed that: under the same steering wheel angle, the vehicle roll stability get worse when the speed increasing; under the same speed, the steering increasing cause the vehicle get easier to turn on it's side.
Serpentine driving; ADAMS; Simulation test; Lateral load transfer rate; Speed; Steering wheel angl
∶U467.1+1
∶A
∶1671-7988 (2016)09-103-05
王全(1990—)男,研究生,就读于国防科技大学指挥军官基础教育学院交通运输工程系,从事车辆侧倾稳定性及侧翻预警控制策略方面的研究。高经纬(1982—)男,副教授,就职于国防科技大学指挥军官基础教育学院交通运输工程系,从事车辆地面力学,车辆故障诊断方面的研究。
猜你喜欢
军事文摘(2021年18期)2021-12-02
现代临床医学(2021年1期)2021-01-26
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中国建筑金属结构(2018年4期)2018-05-23
中国中药杂志(2017年5期)2017-04-06
中国中药杂志(2017年5期)2017-04-06
小资CHIC!ELEGANCE(2016年19期)2016-08-17
现代养生·下半月(2015年6期)2015-09-07
环球时报(2013-01-14)2013-01-14
科学启蒙(2011年9期)2011-09-22
