
新型能量回馈式异步电机测试系统研究
2016-11-08 04:45吕刚张慧王娜侯勇
电气传动 2016年10期
吕刚,张慧,王娜,侯勇
(1.天津出入境检验检疫局,天津 300308;2.天津科技大学电子信息与自动化学院,天津 300222)
新型能量回馈式异步电机测试系统研究
吕刚1,张慧1,王娜1,侯勇2
(1.天津出入境检验检疫局,天津 300308;2.天津科技大学电子信息与自动化学院,天津 300222)
提出了一种新型的能量回馈式异步电机性能测试系统结构,采用绕线式异步电动机作为陪测电机,与被测电机对拖的方式,对被测电机消耗的能量进行回馈利用,提高了测试系统的运行效率,达到很好的节能效果。介绍了系统的结构、原理和控制策略,并通过仿真对系统方案的可行性和节能效果进行了验证。
电机性能测试;绕线式异步电机;对拖;能量回馈
异步电机作为一种重要的电气设备,被广泛地应用于工农业生产及日常生活的各种领域。统计表明,我国异步电动机的用电量占电力系统总负荷的60%以上,因此,提高异步电机的性能具有非常重要的意义。异步电机的性能测试技术多年来一直得到国内外的广泛重视和不断深入的研究[1-8]。目前,大体上有2种类型的异步电机试验系统:第1种是耗能型,其主要系统结构是被测异步电动机联轴带动1台直流发电机运行,直流发电机带可调电阻性负载,通过调节直流发电机的负载电流来改变异步电动机的输出转矩,即用直流发电机-电阻负载组合来模拟异步电机的机械负载,异步电机的输出能量最终消耗在电阻负载上,这种方式势必造成电能的浪费;第2种是馈能型,其主要结构是被测异步电机同轴带动直流发电机,直流发电机给1台直流电动机供电,进而带动同轴的三相交流同步发电机,将发出的交流电能回馈给供电电源。这种方法尽管能提高系统效率,但系统机组多,控制复杂,且容易引起系统超调和振荡[2]。
本文提出一种新型结构的馈能型的异步电机性能测试系统,采用绕线式双馈异步电机作为陪测电机,与被测电机组成同轴对拖测试系统,系统成本低、效率高、易于控制。
1 系统结构及工作原理
馈能型异步电机性能测试系统的结构如图1所示。
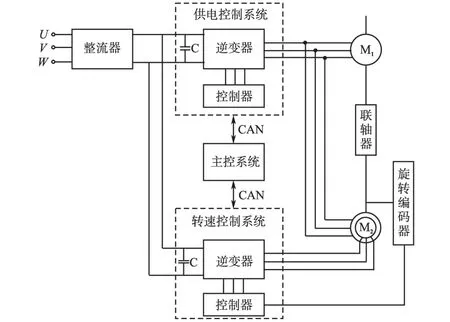
图1 系统结构图Fig.1 System structure diagram
该系统主要包括整流器、被测电机M1、陪测电机M2、联轴器、主控系统、供电控制系统和转速控制系统。陪测电机采用绕线式异步电动机,与被测电机通过联轴器同轴连接,2台电机极对数相同,并由同一电源供电,因此2台电机具有相同的同步转速和运行转速。供电控制系统和转速控制系统均包括1台逆变器及其控制器,分别用来提供2台电机的定子电压和陪测电机的转子电压。2个控制系统均通过CAN总线与主控系统进行通讯,主控系统对2个控制系统分别控制,进而实现整个电机测试过程的自动化和智能化。主控系统有相应的控制程序,分别控制供电电压和系统的转速,同时监控整个系统的运行状况。
系统的工作原理是:当被测电机工作于电动机状态时,输出转矩驱动陪测电机旋转,该状态下系统转速低于同步转速,为了使被测电机的输出能量能够回馈利用,通过控制转速控制系统调节施加于陪测电机转子的电压,使陪测电机工作于亚同步发电状态,实现能量回馈。该方式下系统的功率配置为:被测电机从供电系统吸收电能,陪测电机发出电能给供电系统,极大地提高了系统的效率。同时,亚同步发电状态时陪测电机的转差功率为正,即陪测电机转子从转速控制系统吸收一定的电能。反之,对被测电机进行发电状态性能测试时,通过转速控制系统的控制使系统转速高于同步转速,此时被测电机工作于发电状态,陪测电机工作于超同步电动状态,系统的功率流向为陪测电机从供电控制系统吸收电能,而被测电机发出电能回馈给陪测电机,陪测电机的转差功率仍为正,仍需从转速控制系统吸收电能。可见,无论何种运行状态,系统消耗的总功率等于电动机从供电控制系统吸收的功率减去发电机发出的功率再加上陪测电机转子消耗的转差功率,与传统的耗能型结构的系统相比,实现了显著的节能效果[9]。
2 系统的控制策略
本文提出的异步电机性能测试平台的控制思路比较清晰。首先供电控制系统仅负责提供给定频率和大小的供电电压,采用开环控制和SVPWM技术即可实现,本系统的性能主要取决于转速控制系统的控制策略。根据系统的运行原理,2台电机采用相同的电源供电并同轴运行,被测电机的转矩是随系统的转速变化的,因此仅需对陪测的绕线式双馈电机进行转速控制,即可改变被测电机的工作状态和转矩,实现电机性能的测试。
本文采用了双馈异步电机定子磁链定向矢量控制策略[6,9-10],控制原理是:采用以同步转速旋转的dq坐标系统下的电机状态模型,选择d轴与定子磁链Ψs方向重合,有:

定、转子的电压方程为
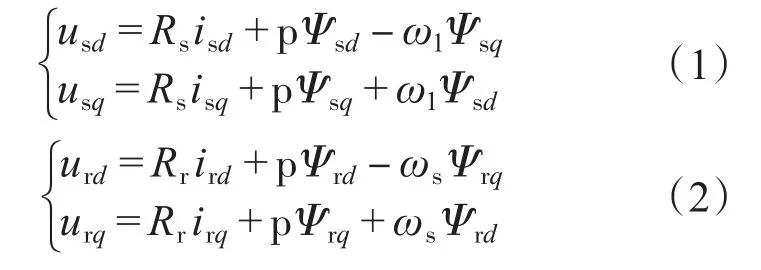
定、转子磁链方程为

转矩方程和运动方程为

式中:usd,usq,urd,urq为定、转子电压dq分量;isd,isq,ird,irq为定、转子电流dq分量;Ψsd,Ψsq, Ψrd,Ψrq为定、转子磁链dq分量;Rs,Rr为定、转子各相绕组电阻;Lm,Lr,Ls分别为电机互感、转子电感和定子电感;np为极对数;ω1为同步角速度;ωs为转差频率;ωm为电机转速;J为转动惯量;Te为电磁转矩;TL为负载转矩;p为微分算子。
经推导可得:


其中,ims为广义励磁电流。可见,若保持定子磁链恒定,则Te与irq成正比,Qs与ird呈线性关系,可通过转子电流dq分量实现转矩和无功功率的解耦控制。


式中:urdc,urqc为dq轴交叉耦合项。
控制中可采用前馈补偿的方法消除稳态误差,提高控制的相应速度。
综上分析,可采用由转子电流内环与转速外环控制组成的双馈电机定子磁链定向矢量控制策略,控制框图如图2所示。

图2 双馈电机矢量控制框图Fig.2 Vector control block diagram of double fed induction motor
3 仿真分析
利用仿真工具Matlab对本文提出的能量回馈式异步电机性能测试系统及其控制策略进行了仿真验证。仿真参数设置为三相鼠笼式异步电机M1,三相绕线式异步电机M2,2台电机的参数均为2对极,2.94 kW,220 V(线电压)和50 Hz。仿真中供电电压为额定频率的额定电压。
仿真1。被测电机工作于电动状态,陪测电机工作于亚同步发电状态,系统转速初始转速设置为1 460 r/min,1.7 s时调整为1 380 r/min,仿真结果如图3~图6所示。
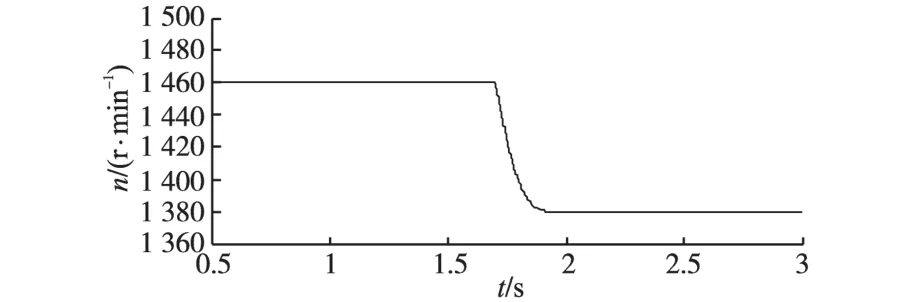
图3 电动状态测试的系统转速Fig.3 System speed in motor region

图4 电动状态测试的转矩Fig.4 Torques in motor region

图5 电动状态测试的M2转子电流Fig.5 Rotor currents of M2in motor region
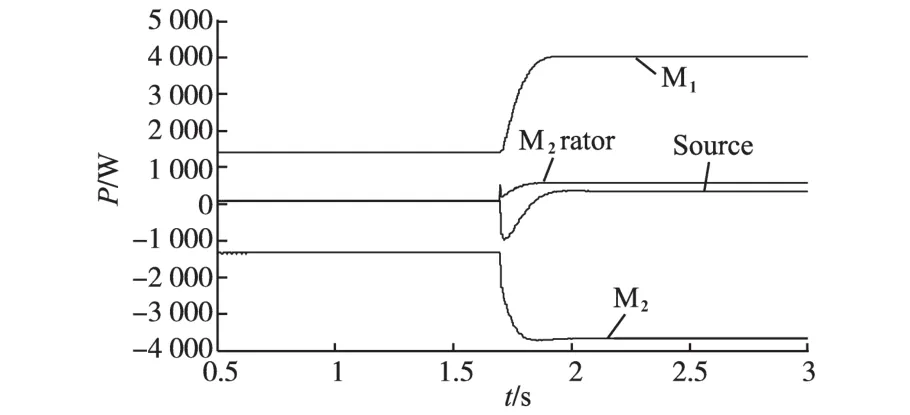
图6 电动状态测试的功率Fig.6 Powers in motor region
仿真2。被测电机工作于发电状态,陪测电机工作于超同步电动状态,系统转速初始转速设置为1 540 r/min,1.7 s时调整为1 600 r/min,仿真结果如图7~图10所示。

图7 发电状态测试的系统转速Fig.7 System speed in generator region

图8 发电状态测试的转矩Fig.8 Torques in generaor region

图9 发电状态测试的M2转子电流Fig.9 Rotor currents of M2in generator region

图10 发电状态测试的功率Fig.10 Powers in generator region
仿真结果表明,在系统测试时,仅需调节给定的系统转速,即可对被测电机进行性能测试,在低于同步转速的范围内调节给定转速,即可改变被测电机的电动机状态的输出转矩,反之则可改变被测电机的发电机状态的输入转矩,对电机性能进行相关的测试。
表1为所仿真的4种运行工况下系统的转速、转矩和各部分功率的数值,其中n为系统转速,Te为轴上转矩,PM1,PM2,Ps,Pr分别为被测电机、陪测电机、公共供电电源和陪测电机转子的电功率,功率为正表示电动功率,功率值为负表示发电功率,可见电源供电功率为2台电机的功率绝对值之差,表明发电机的功率回馈给电动机使用。根据双馈电机串级调速理论,无论陪测电机M2工作于亚同步发电状态还是超同步电动状态,均是由电源向转子输入电功率,因此系统运行消耗的总功率等于定子电源供电功率Ps与M2转子消耗功率之和。
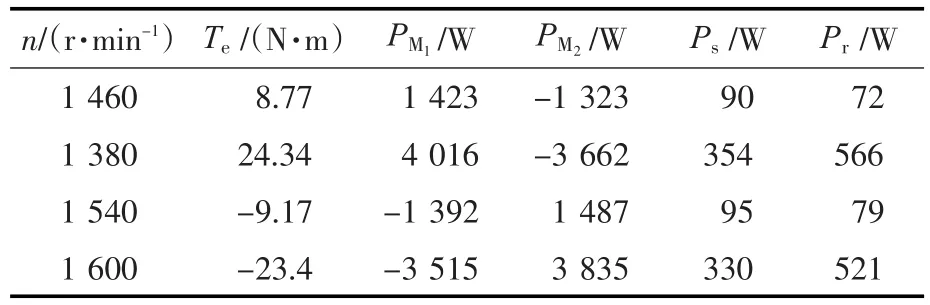
表1 系统转速、转矩与功率Tab.1 The System speeds,torques and powers
表1中数据充分表明了本文所研究系统的节能效果。
4 结论
本文提出了一种结构简单、易于控制、节能效果好的能量回馈型异步电机性能测试系统结构,采用具有双馈功能的绕线式异步电动机作为陪测电机,利用同一电源供电达到被测电机与陪测电机的对拖运行。对陪测电机采用定子磁链定向矢量控制方法,仅通过对陪测电机的转速控制实现被测电机的电动和发电状态性能测试。仿真结果验证了系统结构及其控制策略的有效性。
[1]Collins E R,Huang Y.A Programmable Dynamometer for Testing Rotating Machinery Using a Three-phase Induction Machine[J].Energy Conversion,IEEE Trans.on,1994,9(3):521-527.
[2]Steurer M,Li H,Woodruff S,et al.Development of a Unified Design,Test,and Research Platform for Wind Energy Systems Based on Hardware-in-the-loop Real Time Simulation[C]// Power Electronics Specialists Conference,PESC.IEEE 35th Annual,2004,5:3604-3608
[3]刁利军,刘志刚,沈茂盛,等.交流传动试验系统方案综述[J].电气传动,2007,37(9):3-7.
[4]郑琼林,林飞.现代轨道交通与交流传动互馈试验台[J].电工技术学报,2005,20(1):21-25.
[5]刘昭,高迪驹.异步电动机的交流传动试验平台[J].上海海事大学学报,2010,31(2):40-44.
[6]郑艳文,苑国锋,柴建云,等.大容量对拖式双馈电机试验系统[J].清华大学学报(自然科学版),2010,50(1):27-30.
[7]胥良,宋立伟.节能型能量回馈式电动车用电机对拖试验系统[J].电工技术学报,2007,22(8):162-165.
[8]沈杰,郑灼,叶云岳.一种能量自回馈的交流电机测试系统[J].机电工程,2011,28(7):881-886.
[9]高景德,王祥珩,李发海.交流电机及其系统的分析[M].北京:清华大学出版社,2005.
[10]李亚林,李含善,任永峰,等.变速恒频风力发电系统的仿真研究[J].电力科学与工程,2007,23(3):1-5.
Study on Novel Energy Feedback Type Asynchronous Motor Testing System
LÜ Gang1,ZHANG Hui1,WANG Na1,HOU Yong2
(1.Tianjin Entry-exit Inspection and Quarantine Bureau,Tianjin 300308,China;2.College of Electronic Information&Automation,Tianjin University of Science&Technology,Tianjin 300222,China)
A novel energy feedback type of asynchronous motor performance test system structure was proposed.The wound-rotor asynchronous motor was adopted as accompanying motor,which operated in back to back drive style with the tested motor.The consumed energy of the tested motor was utilized mostly by energy feedback operation of the accompanying motor,thus the system efficiency was greatly improved and the good saving energy effect was achieved.The system structure,principle and control strategy were introduced and the good sowing energy effect was achieved.The feasibility and energy saving effect of the system scheme are verified by simulation.
motor performance test;wound-rotor asynchronous motor;back to back drive style;energy feedback
TM343
A
10.19457/j.1001-2095.20161015
2015-09-12
修改稿日期:2016-06-14
国家质检公益项目(201310067);国家质检总局科技计划项目(2014IK193)
吕刚(1976-),男,硕士,高级工程师,Email:lvg@tjciq.gov.cn
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
环球时报(2022-06-15)2022-06-15
防爆电机(2022年2期)2022-04-26
科学大众(2021年9期)2021-07-16
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
下一代英才(酷炫少年)(2017年3期)2017-06-15
学与玩(2017年4期)2017-02-16
通信电源技术(2016年1期)2016-04-16
中国塑料(2014年12期)2014-10-17
