自适应MEMS加速度计滤波算法*
2016-11-04 09:11娄小平李伟仙
传感器与微系统 2016年11期
赵 阳,娄小平,刘 锋,李伟仙
(1.北京信息科技大学 光电测试技术北京市重点实验室,北京 100192;2.北京信息科技大学 光电信息与仪器北京市工程研究中心,北京 100192)
自适应MEMS加速度计滤波算法*
赵 阳1,2,娄小平1,2,刘 锋1,2,李伟仙1,2
(1.北京信息科技大学 光电测试技术北京市重点实验室,北京 100192;2.北京信息科技大学 光电信息与仪器北京市工程研究中心,北京 100192)
简要分析了微机电系统(MEMS)加速度计使用模型中的噪声来源,介绍了一种自适应平滑滤波器的设计方法,通过增设滤波阈值来调节滤波系数,实现了对MEMS加速度数据的动态降噪处理。实验结果表明:自适应平滑滤波器能有效抑制加速度计输出信号中的高频噪声,滤波前噪声信号均方根误差为2.32×10-5m/s2,经过滤波后,噪声信号均方根误差为4.79×10-7m/s2,提高了加速度计的测量精度,取得了良好的滤波效果。
微机电系统(MEMS)加速度计; 自适应平滑滤波器; 滤波系数; 动态降噪
0 引 言
随着微机电系统(MEMS)技术的发展,MEMS惯性器件的精度和稳定性逐步提高,基于MEMS惯性测量单元(inertial measurement unit,IMU)的捷联式惯性导航系统以其成本低、功耗少、体积小等特点[1]被广泛应用于无人机、手机、计步器、工业自动化、医疗器械、仪器仪表等领域。捷联惯性导航系统主要包括三部分,即速率陀螺、线加速度计和微型计算机。在姿态解算过程中,加速度传感器的测量精度对整个系统的静态性能有重要的影响[2]。在实际应用中,加速度信号不可避免地受到各种噪声或者抖动的影响,测量曲线出现许多与运动状态无关的毛刺干扰[3],使得其精度下降。
惯性测量器件振动噪声抑制可采用加减震措施或者搭建滤波电路,但会增加系统重量和设计的复杂度;或采用神经网络、卡尔曼滤波等算法补偿方案,但算法本身设计复杂,系统开销比较大,如果设计不合理甚至可能导致结果发散[4~6]。工程应用中经常对采集到的模拟信号进行数字化处理,从而减小噪声在有用信号中的比重,提高信号的可靠性,数字滤波的方法具有计算量小、设计简单等特点[7],适用于实际工程,但普通的平滑滤波算法本身适应性不强。
根据物体的运动状态进行调节滤波系数,本文提高了滤波算法的适应性和实时性,为实际应用中加速度计数据的滤波问题提供了新的解决方法。
1 加速度计输出误差模型
在工程实际测试过程中,传感器的输出往往是运动信号和随机信号的混合,而一般运动信号是研究对象。在测试中采集到的信号数据中,由于外界的原因,包括仪器或传感器的零点漂移以及基础运动引起的信号波形偏移等,测得的加速度信号中含有直流分量和干扰噪声[8,9],即当加速度为零时,输出的结果不为零,而是一个非零的输出aerror,即测量值ameasured为
ameasured=areal+aerror
(1)
式中 areal为实际的加速度值;aerror为传感器的测量误差。
其中,测量误差为
aerror=K+anoise
(2)
式中 K为常量,anoise为干扰噪声。
其中,常量值即零漂,可以通过加速度计的标定来矫正,常用的标定方法有六位置测试法[10]、静态24位置方法、静态旋转多位置方法以及椭球拟合的方法[11~14],通过标定,可以去除常量干扰。而采集数据中的随机噪声,则需要通过平滑滤波的方法来提高曲线的平滑度及数据的精度。
2 自适应平滑滤波方法基本原理
常见的平滑滤波的方法有:滑动平均法,一阶惯性低通滤波方法[15]。滑动平均法,方法较为简单,滤波效果较差;一阶惯性低通滤波方法,在静态时,滤波效果较好,但运动状态时,相位滞后,不适合运动状态时使用,通过增设阈值的方法来改善实时性,算法原理简单,效果较好。
采用一阶惯性低通滤波的方法,将普通的硬件RC低通滤波器的微分方程用差分方程来表示,实现软件算法来模拟硬件的滤波功能。一阶惯性低通滤波算法是用本次的采样值与上次的滤波输出值进行加权,得到有效的滤波值,使得输出对输入有反馈作用,具体算法描述如下
Y(n)=m·X(n)+(1-m)Y(n-1)
(3)
式中 Y(n)为本次的滤波输出值;m为滤波系数,其值通常远小于1,大小决定了平滑的效果;X(n)为本次采样值;Y(n-1)为上次的滤波输出值。可以看出,本次的滤波值主要取决于上次滤波输出值,而不是上次的采样值,这和加权平均滤波是有本质区别的,本次采样值对滤波输出的贡献是比较小的,但能够起到一定的修正作用,这种算法具有较大的惯性,模拟了低通滤波的功能,其滤波的截至频率可以由以下式子计算
(4)
式中 fL为截止频率;m为滤波系数;Δt为采样间隔时间;fS为采样频率。
当目标加速度参数为变化很慢时,这是很有效的,但它不能滤除高于采样频率50 %的干扰信号。在对加速度数据进行滤波过程中,由于该算法模拟的是具有较大的惯性,使得在对静止加速度数据进行处理时有良好的效果,而在运动时,会产生较明显的相位延迟。
为了解决上述问题,引入判定运动状态的条件阈值Δa,根据以下式子进行判断,并修改滤波系数m,即
Δ=Y(n)-Y(n-1)>Δa
(5)
(6)
式中 Δ为本次滤波输出值与上次滤波输出值的差;Δa为判定运动状态的条件阈值,由静止状态时候的标准偏差求解;k0为默认滤波参数。
根据以上理论推倒,完成了对一阶惯性低通滤波算法的改进,增强了算法的适应性,通过此种算法可实现动态的实时性和静态的平滑性。
3 实验结果与分析
加速度数据的采集使用GY—86模块,采样频率为40 Hz,量程为2 GHz,初始截止频率设为0.32 Hz,即滤波系数 初始值为0.05。
从图1、图2中可以看出:静态x轴的加速度有良好的平滑效果;从图3中信号频谱可以看出:经过滤波以后原始数据中的高频成分被有效滤除。根据静态x轴的加速度计数据,求解出来标准偏差为0.004 3,将其设为条件阈值Δa,k0根据自己的需要去设置,此处设置为0.4。
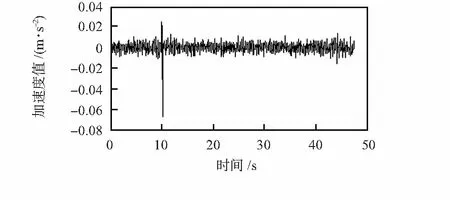
图1 静态x轴加速度计的实测数据Fig 1 Measured data of static x axis accelerometer
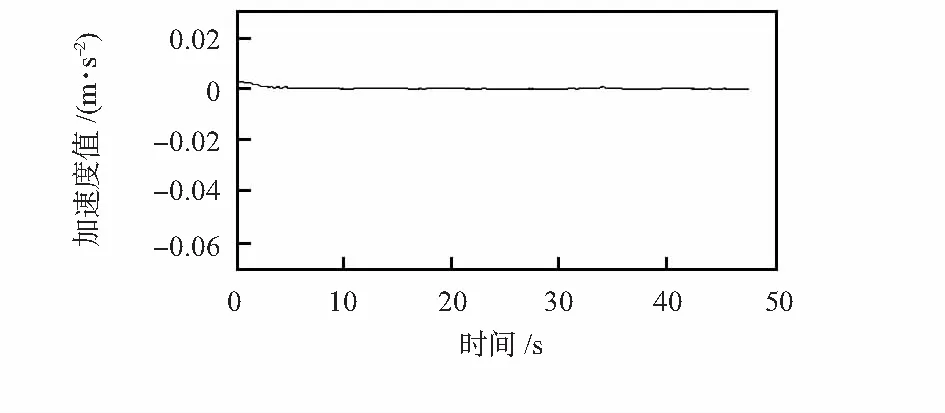
图2 静态x轴加速度计的滤波曲线Fig 2 Filtering curve of static x axis accelerometer

图3 静态x轴加速度计滤波前后输出信号频谱Fig 3 Outputs signal spectrum of static x axis accelerometer before and after filtering
由表1所列的实验结果可知:在未进行滤波的处理之前,各加速度计由于测量噪声等因素的影响,测量数据的噪声方差为10-5数量级;采用8深度滑动平均滤波降噪后,输出的噪声方差大约在10-6数量级;采用自适应平滑滤波降噪后,输出的噪声方差大约在10-7数量级。从数据结果来看:静止状态,自适应平滑滤波的方法比8深度滑动平均
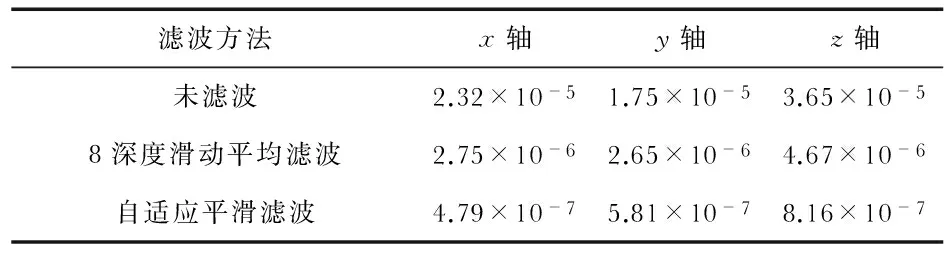
表1 静止状态滤波前后噪声均方差/(m/s2)
滤波的方法滤波效果更好;但在运动状态时,一阶惯性滤波的方法由于是一种具有较大惯性的滤波方法,虽然对数据处理后曲线平滑(如图5所示),但是数据具有较大的滞后性(如图7所示),实线表示原始加速度数据,虚线表示一阶惯性滤波后的数据,对于使用加速度求解姿态等应用来说,加速度数据的滞后性严重影响了姿态求解的实时性。而加设阈值,根据阈值判断物体的运动状态,并自适应调解滤波系数,使其牺牲一定的平滑性(如图6所示),但却大大增强了数据的实时性(如图8所示),实线表示原始加速度数据,虚线表示自适应滤波后的数据,由于图形重复率太高故而将其错开显示。结果表明,自适应的滤波方法在静止时有良好的平滑性,运动时有良好的实时性。
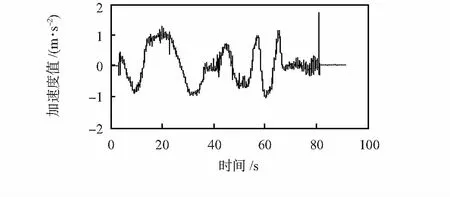
图4 动态x轴加速度计的实测数据Fig 4 Measured data of dynamic x axis accelerometer
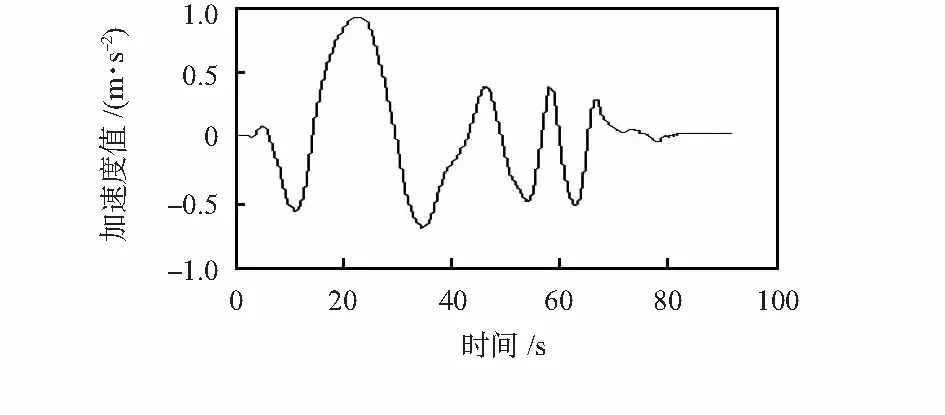
图5 动态x轴加速度计的一阶惯性滤波曲线Fig 5 First-order inertial filtering curve of dynamic x axis accelerometer
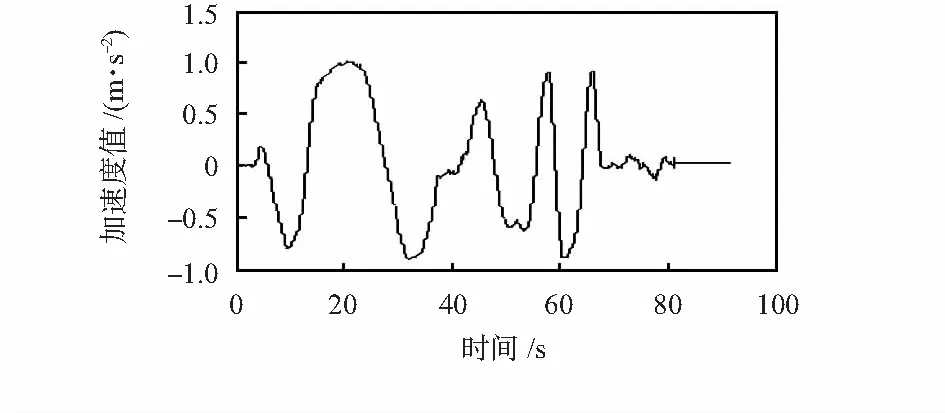
图6 动态x轴加速度计自适应的滤波曲线Fig 6 Adaptive filtering curve of dynamic x axis accelerometer

图7 一阶惯性滤波曲线与原始数据对比Fig 7 Comparison of first-order inertial filtering curve with original data
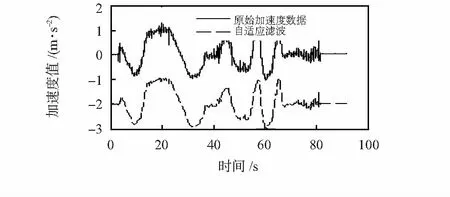
图8 自适应滤波曲线与原始数据对比Fig 8 Comparison of adaptive filtering curve with original data
4 结束语
针对加速度计的降噪问题,主要解决两个方面:数据的实时处理和降低数据的噪声,8深度滑动平均滤波虽然实时性好,但是其静态降噪效果并不理想;一阶惯性低通滤波的方法,方法简单,静态降噪效果较好,但是其动态数据处理有较大的滞后性,分析实验数据,引入条件阈值,使其具有自适应性,通过更改滤波系数,使其实时性大大增强。本文滤波方法将静态数据均方差减小到滤波前的1/50,动态数据具有很好的实时性,获得了较为理想的效果,降低了系统误差,提高了精度。
[1] 胡少兴,刘东昌,张爱武,等.一种基于MEMS传感器的无人飞艇航姿测量系统[J].传感器与微系统,2014,33(3):58-61,65.
[2] 曹晓棠,石云波,周兆英,等.基于MEMS的微型飞行器姿态测量系统[J].传感器与微系统,2013,32(2):122-123,127.[3] 雍世和,孙宝佃.用滑动平均滤波法消除测井曲线上的毛刺干扰[J].华东石油学院学报,1983(1):11-19.
[4] 秦国庆,赖际舟,陈 驵,等.捷联航姿系统加速度计振动噪声平滑技术[J].电子测量技术,2013,36(4):87-91.
[5] 覃方君,许江宁,李 安,等.基于小波卡尔曼滤波的加速度计降噪方法[J].武汉理工大学学报:交通科学与工程版,2009,33(1):49-52.
[6] Fitzgerald R J.Divergence of the Kalman filter[J].IEEE Tran-sactions on Automatic Control,1971,16(6):736-747.
[7] 王 波.浅析数字滤波的常用算法[J].矿业工程,2009,7(3):55-57.
[8] 方新磊,郝 伟,陈 宏.基于频域滤波的加速度信号处理[J].仪表技术与传感器,2012,31(4):94-96.
[9] 陈为真,汪秉文,胡晓娅.基于时域积分的加速度信号处理[J].华中科技大学学报:自然科学版,2010,38(1):1-4.
[10] 宋丽君,秦永元.MEMS加速度计的六位置测试法[J].测控技术,2009,28(7):11-13,17.
[11] 田晓春,李 杰,范玉宝,等.一种微惯性测量单元标定补偿方法[J].传感技术学报,2012,25(10):1411-1415.
[12] Aydemir G A,Saranli A.Characterization and calibration of MEMS inertial sensors for state and parameter estimation applications[J].Measurement,2012,45(5):1210-1225.
[13] Gietzelt M,Wolf K H,Marschollek M,et al.Performance comparison of accelerometer calibration algorithms based on 3D-ellipsoid fitting methods[J].Computer Methods and Programs in Biomedicine,2013,111(1):62-71.
[14] 李 杰,田晓春,范玉宝,等.基于椭球拟合的弹载MIMU现场快速标定技术[J].弹箭与制导学报,2013,33(1):10-12,16.
[15] 赵 毅.数字滤波的滑动平均法和低通滤波法[J].仪表技术,2001(5):40-46.
Adaptive filtering algorithm of MEMS accelerometer*
ZHAO Yang1,2,LOU Xiao-ping1,2,LIU Feng1,2,LI Wei-xian1,2
(1.Beijing Key Laboratory for Optoelectronic Measurement Technology,Beijing Information Science and Technology University,Beijing 100192,China;2.Beijing Engineering Center of Optoelectronic Information and Instruments,Beijing Information Science and Technology University,Beijing 100192,China)
Aiming at noise reduction requirements of micro-electro-mechanical system(MEMS)accelerometer,source of noise in model for MEMS accelerometer is briefly analyzed,and design method of adaptive smoothing filter is introduced,adjust filtering coefficients by adding filtering threshold,dynamic noise reduction is realized.Experimental results show that the adaptive smoothing filter can effectively suppress high frequency noise in output signal of accelerometer and error of root mean square of noise signal before filtering is 2.32×10-5m/s2,and it is reduced to 4.79×10-7m/s2after filtering,and measurement precision of accelerometer is improved,and obtain good filtering effect.
micro-electro-mechanical system(MEMS)accelerometer;adaptive smoothing filter;filtering coefficient;dynamic noise reduction
10.13873/J.1000—9787(2016)11—0120—03
2015—12—09
国家自然科学基金资助项目(51475047); 教育部“长江学者与创新团队”发展计划资助项目(IRT1212); 北京市属高等学校创新团队建设提升计划资助项目(IDHT20130518)
TN 713.7
B
1000—9787(2016)11—0120—03
赵 阳(1989-),男,河南郑州人,硕士研究生,研究方向为MEMS传感器。
猜你喜欢
声学与电子工程(2021年2期)2021-07-26
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年1期)2017-05-17
北京航空航天大学学报(2017年12期)2017-04-23
电子技术与软件工程(2016年22期)2016-12-26
光学精密工程(2016年5期)2016-11-07
电测与仪表(2016年15期)2016-04-12
燕山大学学报(2015年4期)2015-12-25
探测与控制学报(2015年4期)2015-12-15
导航定位与授时(2014年2期)2014-04-27