基于洛伦兹函数的变步长凸组合最小均方算法
2016-11-02 00:37:51曾乐雅王天睿
系统工程与电子技术 2016年5期
曾乐雅,许 华,王天睿
(1.空军工程大学信息与导航学院,陕西 西安 710077;
2.南京师范大学地理科学学院,江苏 南京 210046)
基于洛伦兹函数的变步长凸组合最小均方算法
曾乐雅1,许华1,王天睿2
(1.空军工程大学信息与导航学院,陕西西安 710077;
2.南京师范大学地理科学学院,江苏南京 210046)
为进一步减小收敛速率与稳态误差之间的矛盾,改善自适应滤波算法,利用改进的Lorentzian函数提出了一种新的变步长凸组合最小均方(new variable step-size convex-combination of least mean square,NVSCLMS)算法,该算法既有效提高了收敛速率又具备很好的抗干扰能力。同时,为了克服CLMS算法停滞等待的弊端,采用了瞬时转移结构;另外,在参数的迭代公式中使用sign函数进行优化以降低运算量。仿真结果证明该算法与CLMS、VS-CLMS相比,在不同的仿真环境中均能表现出良好的均方特性和跟踪特性。
自适应滤波;最小均方算法;凸组合;变步长;系统识别
网址:www.sys-ele.com
0 引 言
自适应算法被广泛应用在噪声对消、系统识别、时延估计等诸多方面,是信号处理技术中至关重要的部分。其中最小均方(least mean square,LMS)误差算法是实现自适应的一种行之有效的方法,因为其实现便捷且高效的特点而被广泛使用[16]。但是在LMS中,收敛速率和稳态误差是一组不可调和的矛盾,这对系统实现影响很大。
近年来,为了解决这种矛盾来提高性能,推导出了各类LMS算法。文献[4 6]是根据步长参数与误差信号满足不同的函数关系而提出的变步长最小均方算法。文献[7-14]是将两个LMS滤波器进行凸组合得到凸组合最小均方(convexcombination of least mean square,CLMS)滤波器算法,使组合滤波器系统能够克服单个滤波器的矛盾而实现更优的性能。文献[15-16]将变步长与凸组合进行结合得到一种变步长凸组合最小均方(variable step-size CLMS,VS-CLMS)自适应滤波算法。其中,步长参数与误差信号满足Sigmoid函数,在一定程度上改善了滤波器的性能,但是误差信号在0值附近时步长变化较大,导致当系统处于稳态时依然有较大的步长,另外,Sigmoid函数的计算过程较为复杂且其收敛速率表现并不是特别明显。因此需要对Sigmoid函数加以改进从而得到更好的性能。
上述算法在转换阶段,即系统在快速滤波器达到稳态超量均方误差(excess mean squared error,EMSE)后停止,等待慢速滤波器达到相同的EMSE后再继续收敛,导致收敛速率较慢。为了避免此限制,文献[9]提出了一种基于CLMS的低复杂度权值转让策略,通过使用一个长度为N0的窗来实现,这个方法通过简单赋值来完成,有效克服其弊端。
受此启发,本文提出一种新改进的变步长凸组合最小均方算法(new variable step-size CLMS,NVS-CLMS)。该算法中大步长滤波器的步长参数与误差信号满足Lorentzian函数,同时加入瞬时权值转移结构。另外,在参数a(n)的迭代公式中使用sign函数[11],既可以降低计算量又能提高参数的稳定性。实验结论证实该算法具备良好的收敛速率和跟踪性能,有很大的实际应用价值。
1 VS-CLMS算法
VS-CLMS算法原理如图1所示。由两个相互独立的LMS滤波器组成,其中一个设置为步长可变的滤波器来保证算法的收敛速率,另一个设置为固定小步长的滤波器来保证系统较低的稳态误差。其中x(n)为信号输入;y(n)为系统输出的等效结果;d(n)为期望响应;e(n)为整个滤波器的等效误差;w1(n)、w2(n)分别为滤波器的权值;y1(n)和y2(n)分别为两个滤波器的输出;e1(n)和e2(n)分别为两个滤波器的误差;λ(n)为CLMS算法的联合参数。为论述方便,假设第一个滤波器是步长变化的。

图1 VS-CLMS算法原理图
则滤波器系统的输出为

式中,yi(n)=wTi(n)x(n),i=1,2;联合参数λ(n)∈[0,1],定义为

滤波器系统的等效误差为

组合权值表示为

单个滤波器误差为

单个权值更新公式为

系统等效误差表示公式为
式(2)中,参数a(n)的取值遵循LMS准则,则其迭代公式可由最速下降表达式推导得出为

式中,μa为参数a(n)的步长因子,其取值应保证a(n)快速收敛以确保组合滤波器的输出能够根据期望信号稳定的实现对输入信号的跟踪。另外,当λ(n)的取值非常接近边界值0或1时,式(8)中混合参数a(n)的更新停止,为了避免这个问题将a(n)的取值范围限定为[-a+,a+],以保证λ(n)的范围在[1-λ+,λ+],其中λ+=sgm(a+)是一个接近1的常数。在该限定下a(n)的更新可以有保证稳定的进行。通常a+=4,则联合参数λ(n)的范围为[0.018,0.982][10]。
VS-CLMS中第一个滤波器为根据均方误差收敛的变步长LMS独立滤波器,步长参数μ1选取满足Sigmoid函数[7],其表达式:

为使μ1收敛,式(9)中参数取值应满足:α>0,0<β<μmax。
从式(9)能够看出,随着误差e(n)的变化,步长参数μ1(n)的取值也同时发生变化。在迭代初期,误差e(n)通常比较大,此时需要步长参数取值接近其最大值μmax来使系统得到最快的收敛速率;随着迭代的次数增多误差e(n)逐渐减小并趋近于0,为得到更好的稳态性能,μ1(n)的取值也应趋向于一个较小的值。
2 改进的变步长CLMS算法
文献[15]中提出的变步长算法,一定程度上改善了滤波器的性能,但是误差信号在0值附近时步长变化较大,导致当系统处于稳态时依然有较大的步长,另外,Sigmoid函数的计算过程较为复杂且其收敛速率表现并不是特别明显,需要对提出新的步长控制函数以得到更好的性能。因此,本文使用Lorentzian函数[4]来控制步长参数变化,即

式中,α控制变化范围;δ控制函数趋于平稳时的形状。针对此函数,为了更好的去除外界噪声对步长参数变化的影响,具有更好的抗干扰性,对式(10)进行进一步改进,即

图2为Lorentzian函数α=0.006,δ=0.001与Sigmoid函数α=0.06,β=0.04的曲线对比图,能够看出在图示符合条件的范围中,Lorentzian所对应的步长参数要大于Sigmoid,因此该改进具有更快的收敛速率和跟踪性能,并且能够有效抵抗系统的突变。

图2 Lorentzian函数与Sigmoid函数的曲线对比图
CLMS的计算复杂度较高很大程度上阻碍了其应用和发展。为了解决这个问题,本文采用sign函数对参数a(n)的更新式(8)进行优化[11]。
因为a(n)的更新遵循LMS准则,则其代价函数为

a(n)被归一化后其代价函数的梯度可以写作ΔaJ(n)。则a(n)的递归更新公式为

其中ΔaJ(n)的计算公式为
式中,sign(x)函数,x>0时取值为1,x<0时取值为-1,x=0时取值为0。
将式(15)、式(14)代入式(13)可得

由于λ(n)与1-λ(n)始终大于零,则式(16)可以被等效的简化为

使用式(17)替代式(8)计算a(n)可以有效地降低运算量。
传统的CLMS算法在转换阶段,变步长滤波器达到稳态EMSE之后,组合滤波器会停止收敛等待固定小步长滤波器,这种弊端极大影响系统的收敛速率。为了克服这种限制,本文采用瞬时转移结构[9],其通过定义一个长度为N0的窗来完成。
瞬时转移结构的具体实现:当λ(n)的取值大于λ+,即组合滤波器的性能依赖于变步长滤波器的收敛性能时,定义一个N0的取值,使得在该阶段中系统每隔N0次迭代就令慢速滤波器的权值等于变步长滤波器的权值,即令w2(n+1)=w1(n+1)。瞬时转移结构的使用可以让系统在达到变步长滤波器稳态后及时进入慢速滤波器的收敛阶段。对于N0的取值,为了使慢速滤波器能够实时地进行权值同步,N0的值越小越好,虽然较小的取值不会影响系统的性能但是增加了计算量,因此,为了达到良好效果通常取N0=2。
变步长CLMS的第二个滤波器为小步长的慢速收敛的,由此可以求得LMS失调为[15]

式中,M为失调因子;R为权矢量失调因子。
3 抗干扰性能分析
在LMS算法中,误差e(n)计算公式为[4]

通过对式(19)移项可以计算期望响应

由式(20)能够看出,误差e(n)与系统的输入信号x(n)相关,为了进一步进行性能分析,期望响应的另一种表达式表示为

式中,N(n)为外界干扰信号,是与输入信号x(n)相互独立且均值为0的高斯白噪声;w*(n)为理想权值。
令

式中,Δw(n)是权值偏差。则可以得到
因为N(n)与x(n)相互独立且均值为0,所以对式(24)和式(25)两边同时求期望并化简后可以得到

由式(26)和式(27)能够看出,式(26)中存在E[N2(n)],所以E[e2(n)]的取值与外界干扰信号的大小有关,当存在大幅度的干扰时会导致系统不稳定。而在式(27)中E[e(n)e(n-1)]的取值仅与输入信号x(n)有关,外界噪声的干扰对其没有影响,因此其抗干扰性能较改进之前有所提高。
4 算法复杂度分析
以运算过程中每次迭代所使用乘法次数判断滤波器算法的运算复杂度,每个部分需要的运算数统计如表1所示。
(例如,设mb= 0.3,Φ= 175,ψx= 15,[α]= 40,利用软件Excel的规划求解功能,可这样求得ma= 2.508,mc= 2.194,φ0= 56.0,ψ0= 15.3。

表1 不同算法计算复杂度比较
LMS、CLMS、VS-CLMS、NVS-CLMS的计算复杂度比较如表1所示,其中M为滤波器的长度。基本LMS算法需要2M+1次乘法,而CLMS、VS-CLMS、NVS-CLMS由两个LMS滤波器组成,因此其基本计算次数为4M+2;在凸组合部分CLMS、VS-CLMS需要至少6次乘法来计算组合滤波器输出和参数a(n)的更新,而本文的算法仅需要4次;通过函数进行变步长计算时VS-CLMS要进行3次乘法和1次指数运算,NVS-CLMS仅需要5次乘法,避免了指数运算有效较小计算量;在变步长滤波器收敛阶段,本文的算法使用瞬时转移结构直接进行权值的赋值,减小了M+1次乘法计算。
综上,VS-CLMS计算量为4M+12次乘法和2次指数运算;NVS-CLMS在收敛阶段需3M+11次乘法和1次指数运算,在变步长滤波器达到稳态后需4M+12次乘法和1次指数运算。总体来说有效减小了运算复杂度。
5 仿真实验
为了验证算法的性能,现将NVS-CLMS算法与传统的CLMS算法、文献[15]的VS-CLMS算法同时作用于系统辨识过程中并在不同的环境下分别实验。各算法参数的选取均为其多次实验所得的最佳值,得到的EMSE学习曲线均是200次蒙特卡罗实验得到的平均结果。参数取值:μ1=0.025,μ2=0.002 5;NVS-CLMS中α=0.006,δ=0. 01,μa=0.17;VS-CLMS中α=0.06,β=0.05,μa=0.2;CLMS中μa=160。
5.1引入瞬时转移结构对收敛的影响
某待测系统为10阶非递归型滤波器模型,假定滤波器长度与模型阶次值相同。输入高斯白噪声x(n)服从标准正态分布,同时外加干扰与x(n)相独立且信噪比为20 dB。采样点数为5 000,令系统在迭代至2 500点时发生突变来对比其跟踪性能。
在上述条件下,让本文提出的NVS-CLMS算法在使用瞬时转移结构与不使用该结构的情况下分别仿真进行对比,以明确观察瞬时转移结构的作用。对比曲线如图3所示。

图3 瞬时转移结构使用对比图
从图3观察得出,未使用瞬时转移结构的算法在收敛曲线中表现出明显的停滞,且在迭代至1 300点处才趋于平稳,而使用瞬时转移结构的算法有效避免了传统CLMS算法快速滤波器停滞等待的弊端,在500次迭代时就达到稳态,提高了系统的收敛速率。
5.2高斯白噪声为输入的仿真
在第5.1节所述情况下进行各算法仿真。EMSE学习曲线如图4所示。

图4 在高斯白噪声输入时EMSE的学习曲线
从图4观察得出,本文提出的NVS-CLMS算法收敛速率更快,在迭代至500步时便趋于稳定且拥有更低稳态误差,在跟踪性能方面相对于VS-CLMS也有明显地提高。
5.3相关信号为输入的仿真

设输入产生方程式[15]式中,r(n)是高斯白噪声,方差为1且与系统的外加干扰信号相独立。其他条件与第5.1节中相同。EMSE学习曲线如图5所示。

图5 在相关信号输入时EMSE的学习曲线
从图5观察得出,本文提出的算法也能很好地适用于相关信号输入时的情况,在收敛过程中算法有突变发生对稳定性有所影响,但相比仍有良好的性能。
5.4非平稳环境下的仿真
让各算法分别在非平稳时变系统中进行实验[15]w(n+1)=w(n)+c(n)(29)式中,c(n)为0均值,0.01方差的高斯白噪声。其他条件与第5.1节中相同。EMSE学习曲线如图6所示。

图6 在非平稳环境下时EMSE的学习曲线
从图6观察得出,在非平稳环境下稳态误差较第5.2节与第5.3节有所下降,但同VS-CLMS、CLMS算法相比,本文的NVS-CLMS性能优势也较为明显。
5.5抗干扰性能比较
为了更清楚地观测NVS-CLMS和VS-CLMS算法的抗干扰性能,在第5.1节所述情况中不同信噪比下进行仿真,并分别截取两种算法EMSE学习曲线接近收敛的部分,如图7和图8所示。

图7 VS-CLMS算法在不同信噪比下的学习曲线
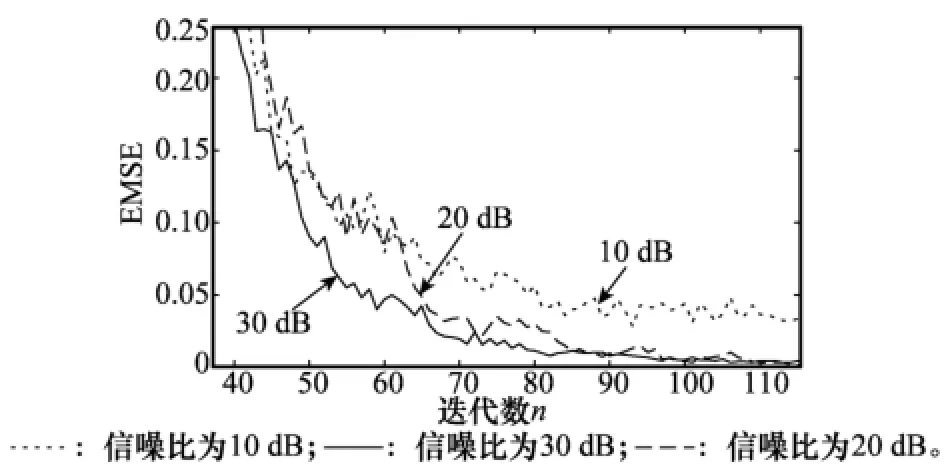
图8 NVS-CLMS算法在不同信噪比下的学习曲线
通过比较图7和图8可以看出,信噪比越高滤波得到信号的误差就越小,在各个信噪比的曲线中,图7的波动大、振荡剧烈,而图8的曲线较为平滑且稳态误差更低。因此,本文NVS-CLMS的抗干扰性能更优。
5.6实际量测数据的测试
本节利用一段实际采集的某军用标准短波通信信号进行信道均衡的测试,信号的时域和时频图显示如图9所示。
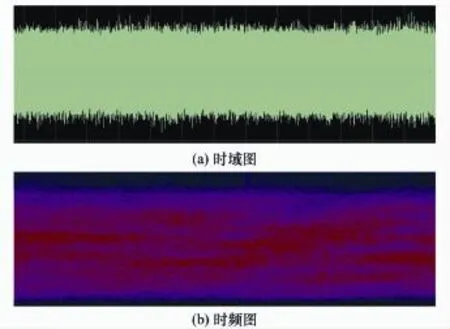
图9 实际量测信号的时域和时频图显示
该信号的调制方式为八相移键控(8 phase shift keying,8PSK),符号率为2 400 bps,信号头长度为287个符号,其后的数据每隔256个未知数据符号插入了31个已知符号。
处理方法:在已知序列阶段(同步头和插入31个已知符号阶段)采用自适应算法进行已知数据引导的信道均衡,在未知数据阶段采用判决引导的信道均衡。为了减小同步误差的影响,采用了频率十分精确的本地载波,同时利用锁相环跟踪载波相位以及采用最大平均功率点定时同步方法。在自适应算法进行信道均衡阶段采用VS-CLMS及本文提出的NVS-CLMS算法分别进行处理后得到的输出星座图结果如图10和图11所示。
通过比较图10和图11可以看出,在实际量测数据的测试试验中,VS-CLMS算法以及本文改进的NVS-CLMS算法均可以较好的恢复出原信号,而NVS-CLMS算法输出的星座图更加清晰,每个信号点处的点更加聚集,相邻信号点分的更开。在实际测试中通过估计信噪比得到VSCLMS算法的结果输出为19.5 dB,而NVS-CLMS算法为21 d B,提高了1.5 d B。综上比较,本文改进的算法在实际量测数据测试中达到了较好的效果且输出结果更加理想,充分说明该算法的实效性。

图10 VS-CLMS算法处理得到的星座图
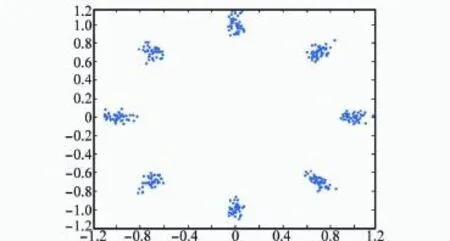
图11 NVS-CLMS算法处理得到的星座图
6 结 论
本文所提出的NVS-CLMS算法,采用Lorentzian函数来控制步长参数的变化有效提高了收敛速率和跟踪性能,且进一步通过公式的改进具备了更好的抗干扰特性;另外,利用sign函数对参数a(n)的迭代公式进行改进,使新算法的计算复杂度得到了优化;在此基础上引入瞬时转移结构避免了CLMS算法停滞等待的弊端。NVS-CLMS算法在不同条件下仿真及在实际量测数据测试中均取得更优的性能,拥有较大的实用价值。
[1]Lopes W B,Lopes C G.Incremental combination of RLS and LMS adaptive filters in non-stationary scenarios[C]//Proc.of the International Conference on Acoustics,Speech and Signal Processing,2013:5676-5680.
[2]Tan Y,He Z Q,Tian B Y.A novel generalization of modified LMS algorithm to fractional order[J].IEEE Signal Processing Letters,2015,22(9):1244-1248.
[3]Meher P K,Sang Y P.Critical-Path analysis and low-complexity implementation of theLMS adaptive algorithm[J].IEEE Trans.on Circuits and Systems,2014,61(3):778-788.
[4]Zhang J J,Zhou F F,Xu S.Improved variable step size LMS improved algorithm[J].Modern Electronics Technique,2014,37(1):11-13.(张晶晶,周菲菲,许帅.改进的变步长LMS改进算法[J].现代电子技术,2014,37(1):11-13.)
[5]Lee H S,Kim S F,Lee J W,et al.A variable step-size diffusion LMSalgorithm for distributed estimation[J].IEEE Trans.on Signal Processing,2015,63(7):1808-1820.
[6]Zhang F,Wang Y,Ai B,Variable step-size MLMS algorithm for digital predistortion in wideband OFDM systems[J].IEEE Trans.on Consumer Electronics,2015,61(1):10-15.
[7]Azpicueta R,Figueiras-Vidal L A,Arenas-García A R.A normalized adaptation scheme for the convex combination of two adaptive filters[C]//Proc.of the International Conference on Acoustics,Speech and Signal Processing,2008:3301-3304.
[8]Silva M T M,Nascimento V H,Arenas-García J.A transient analysis for the convex combination of two adaptive filters with transfer of coefficients[C]//Proc.of the International Conference on Acoustics,Speech and Signal Processing,2010:3842-3845.
[9]Nascimento V H,De Lamare R C.A low-complexity strategy for speeding up the convergence of convex combinations of adaptive filters[C]//Proc.of the International Conference on Acoustics,Speech and Signal Processing,2012:3553-3556.
[10]Arenas-García J,Figueiras-Vidal A R,Sayed A H.Mean-square performance of a convex combination of two adaptive filters[J]. IEEE Trans.on Signal Processing,2006,54(3):1078-1090.
[11]Lu L,Zhao H Q.A novel convex combination of LMSadaptive filter for system identification[C]//Proc.of the International Conference on Signal Processing,2014:225-229.
[12]Das B K,Chakraborty M C.Systems sparse adaptive filtering by an adaptive convex combination of the LMS and the ZA-LMSalgorithms[J].IEEE Trans.on Circuits and Systems,2014,61(5):1499-1507.
[13]Donmez M A,Ozkan H,Kozat S S.Transient analysis of convexly constrained mixture methods[C]//Proc.of the IEEE International Workshop,Machine Learning for Signal Processing,2012:1-5.
[14]Li N,Zhang Y G,Wang C C.A convex combination LMS algorithm based on krylov subspace transform[C]//Proc.of the 5th International Joint Conference,Computational Sciences and Optimization,2012:802-805.
[15]Yu X,Liu J C,Li H R.A convex combination of variable step-size adaptive filter and its mean-square performance analysis[J].Acta Electronic Sinica,2010,38(2):480-484.(于霞,刘建昌,李鸿儒.一种变步长凸组合自适应滤波器及其均方性能分析[J].电子学报,2010,38(2):480-484.)
[16]Hong D F,Miao J,Su J,et al.An improved variable step-size convex combination of LMSadaptive filtering algorithm and its analysis[J].Acta Electronic Sinica,2014,42(11):2225-2230.(洪丹枫,苗俊,苏健,等.一种变步长凸组合LMS自适应滤波算法改进及分析[J].电子学报,2014,42(11):2225-2230.)
Low computational complexity variable step-size CLMS algorithm based on Lorentzian function
ZENG Le-ya1,XUHua1,WANG Tian-rui2
(1.Information and Naυigation College,Air Force Engineering Uniυersity,Xi'an 710077,China;
2.School of Geography Science,Nanjing Normal Uniυersity,Nanjing 210046,China)
In order to avoid the conflict between convergence speed and stable state error,and improve the adaptive filter algorithm,a new variable step-size convex-combination of least mean square(NVS-CLMS)algorithm is proposed by using the improved Lorentzian function.The new algorithm effectively improves convergence rate and has good anti-interference performance.Furthermore,the instantaneous transfer scheme is utilized to overcome disadvantages of CLMSand the sign function in iterative of the parameter can also reduce the computational complexity.Theoretical analysis and simulation results show that under different environments,the proposed algorithm,compared with the CLMSand VS-CLMSalgorithms,not only has a superior capability of tracking,but also can maintain a better convergence.
adaptive filtering;least mean square(LMS)algorithm;convex combination;variable stepsize;system identification
TN 911.7
A
10.3969/j.issn.1001-506X.2016.05.05
1001-506X(2016)05-0998-06
2015-06-29;
2015-10-28;网络优先出版日期:2015-12-23。
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20151223.1019.012.html
国家自然科学基金(61001111)资助课题
曾乐雅(1992-),男,硕士研究生,主要研究方向为通信信号处理、自适应滤波。
E-mail:zengleya@163.com
许华(1976-),男,副教授,博士,主要研究方向为通信信号处理、盲信号处理。
E-mail:xu.hua@139.com
王天睿(1992-),女,硕士研究生,主要研究方向为信息采集与处理。
E-mail:wangtianrui0321@163.com
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17 08:07:30
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
煤气与热力(2021年4期)2021-06-09 06:16:54
今日中国·法文版(2020年7期)2020-07-04 02:53:48
中华戏曲(2020年1期)2020-02-12 02:28:18
电力建设(2015年2期)2015-07-12 14:15:59
河北科技大学学报(2015年5期)2015-03-11 16:16:37
深圳大学学报(理工版)(2015年5期)2015-02-28 16:22:08