电动汽车EPS助力曲线设计与评价研究
2016-10-27 01:46张永辉陈丁跃申福林
重庆理工大学学报(自然科学) 2016年9期
张永辉,王 悦,陈丁跃,申福林
(1.西安航空学院 车辆工程学院,西安 710077; 2.长安大学 汽车学院,西安 710064)
电动汽车EPS助力曲线设计与评价研究
张永辉1,王悦1,陈丁跃2,申福林2
(1.西安航空学院 车辆工程学院,西安710077; 2.长安大学 汽车学院,西安710064)
对电动汽车助力转向特性进行分析,研究不同车速下驾驶员理想转向盘力矩随方向盘转角、侧向加速度变化的规律。以驾驶员理想转向盘力矩为依据,拟合出高、低速范围内理想转向盘力矩,并分析了低速范围内理想转向盘力矩模型参数及其影响因素。提出了符合转向特性的助力函数形式,设计了电动汽车的助力特性曲线,并阐述了设计原理及过程。在ADAMS/CAR中建立的整车模型与Matlab进行联合仿真。试验结果表明:所设计的助力曲线更符合转向特性的要求。
电动汽车;电动助力转向系统;理想转向盘力矩特性;助力曲线;助力函数
电动助力转向系统(EPS)在改善汽车操纵性和稳定性方面优于其他转向系统。电动助力转向系统在不同型号车辆上的结构部件尽管不一样,但是基本原理是一致的,一般是由助力电机、控制单元、方向盘转矩传感器及转向器等机械传动部分组成[1]。EPS系统开发的首要任务是确定适合的助力特性。助力特性是指电机助力力矩随汽车运动状态变化而不断变化的规律[2]。一个好的助力特性能协调驾驶员和整车、路面状况的关系,从而解决转向轻便性与路感之间的矛盾。
目前,针对助力特性的研究多为曲线型助力,这是因曲线型较直线型可获得更好的路感,但曲线型助力特性在低速及原地转向时轻便性较差。本文以某款电动车为例,分析了助力特性的影响因素,拟合出一种助力曲线函数形式。试验结果表明:该助力曲线更符合汽车转向特性的要求。
1 助力特性分析
EPS电机助力力矩等于路面传递到转向盘的阻力矩与驾驶员施加在转向盘力矩的差值这一原则不变。汽车行驶时转向盘阻力矩主要有地面摩擦力矩引起的阻力矩、垂向力回正力矩引起的阻力矩、侧向力回正力矩引起的阻力矩、纵向力回正力矩和系统干摩擦力矩组成[3],所以只要确定驾驶员施加在转向盘的力矩,即可确定助力力矩。吉林大学通过驾驶模拟器得到了我国驾驶员理想的转向盘力矩特性,即在车速大于40 km/h且在不同质心侧向加速度下,以驾驶员施加在转向盘的操控感为基础的转向盘力矩特性,如表1所示。

表1 理想的转向盘力矩平均值
高速时小的转向盘转角会引起大的侧向加速度,所以驾驶员对侧向加速度敏感,而汽车以低于40 km/h的车速行驶或原地转向时,质心侧向加速度变化率很小,驾驶员对侧向加速度的感知较模糊,而对方向盘转角的变化比较敏感。在低速及原地转向时,驾驶员理想转向盘力矩可由式(1)计算[4]得到。
(1)
式中:Texpect_l为理想转向盘力矩;V为车速;l1为驻车因子;k1为车速感知因子;a1为极限把持因子;b1为抗干扰因子;c1为转向盘转角感知因子。若车辆体积、整车质量等相近,理想转向盘力矩与车型无关[5],所以式(1)适合于整车基本参数相近的车型。
2 助力曲线参数的确定
2.1转向盘总阻力矩的确定
在MSC.ADAMS/CAR中建立整车机械系统模型及路面谱模型。整车机械系统模型包括悬架系统、转向盘、转向柱、齿轮齿条转向器和轮胎模型,如图1所示。在特定车速下转动转向盘至极限位置,仿真出转向盘阻力矩最大值。
2.2驾驶员理想转向盘力矩的确定
为使转向盘易于操控且转向盘力矩过渡平缓,通过Matlab软件中cftool工具对高速段转向盘力矩随车速及侧向加速度的变化规律进行多项式拟合取平均值,得出车速在40~120km/h时驾驶员理想的转向盘力矩图谱,如图2所示。
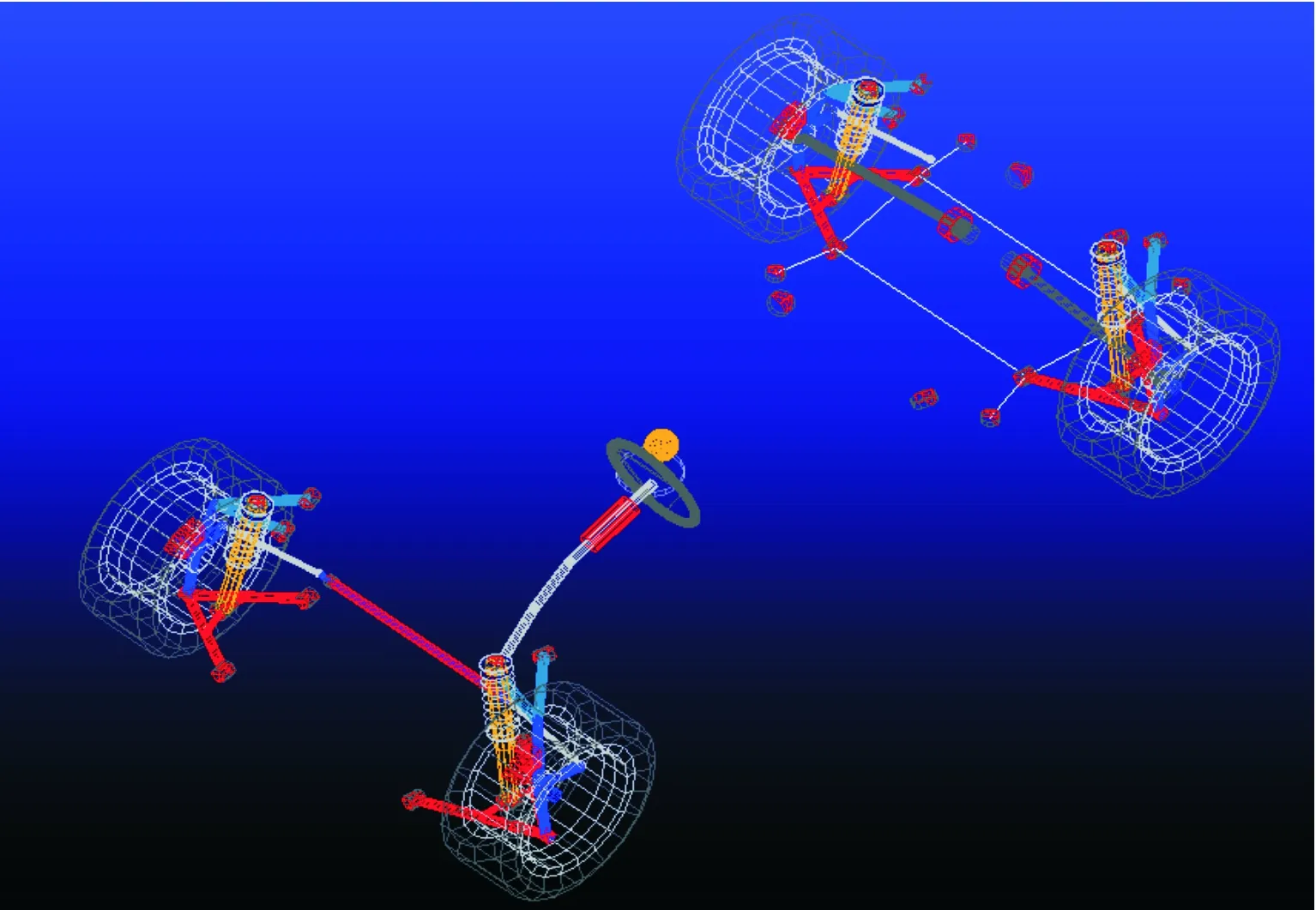
图1 整车机械系统模型

图2 车速在40~120 km/h时的理想转向盘力矩三维图
通过式(1)及驾驶试验得出低速段的车辆在0~20km/h的理想转向盘力矩图谱,如图3所示。同时得出该车型l1、a1、c1分别为0.67、2.18、0.3,k1、b1分别为0.028、1.4。研究发现:调整车速感知因子k1值,低速下转向盘力矩可在较大的范围内变化,这为载质量较大的商用车EPS开发提供了理论依据,而抗干扰因子b1对转向盘力矩变化影响不大。
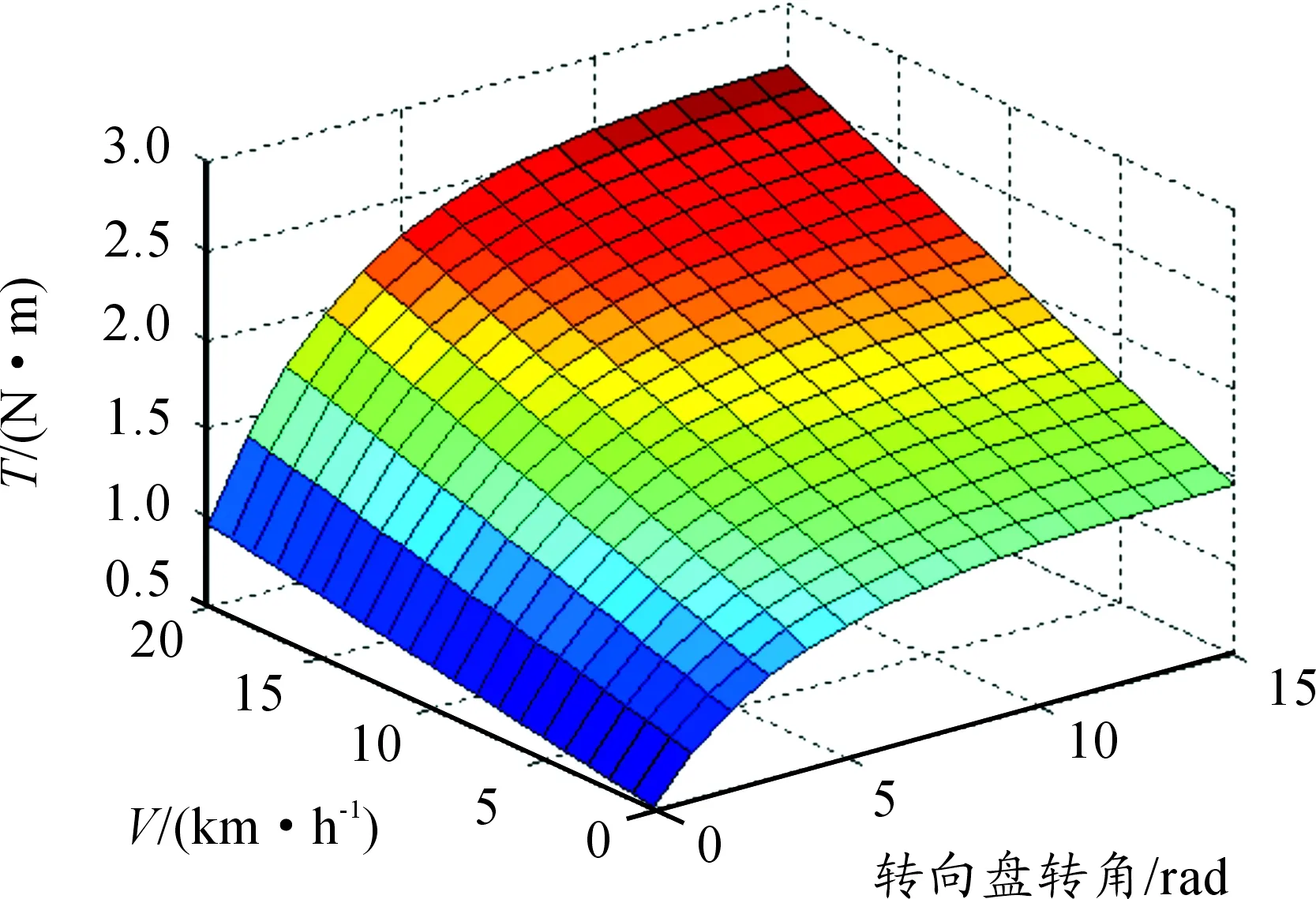
图3 车速在0~20 km/h时的理想转向盘力矩三维图
2.3助力函数的确定
在传统助力曲线设计中,研究人员一般会选择一条线型曲率较好的函数作为基本助力函数,如抛物线、直线等,然后根据转向阻力距最大值及车速感应系数拟合其他车速下的助力曲线。这就使得现有的助力曲线不能很好地满足车速与助力力矩间的关系,从而不能实现由低速行驶时助力效果明显向高速行驶时路感增强转变。理想的助力曲线应由低速范围内的直线型逐渐向高速范围内的曲线型逐渐过渡,以此保证低速行驶转向轻便,同时高速行驶时兼具一定的路感。

(2)
式中:Ta为电机助力力矩;Td为转向盘力矩;a、c为比例常数,该常数值决定了转向盘力矩的范围;b(v)为车速比例值,其值与助力曲线凹凸性有关,且随着车速的增大,b(v)值逐渐增大。具体数据见表2。
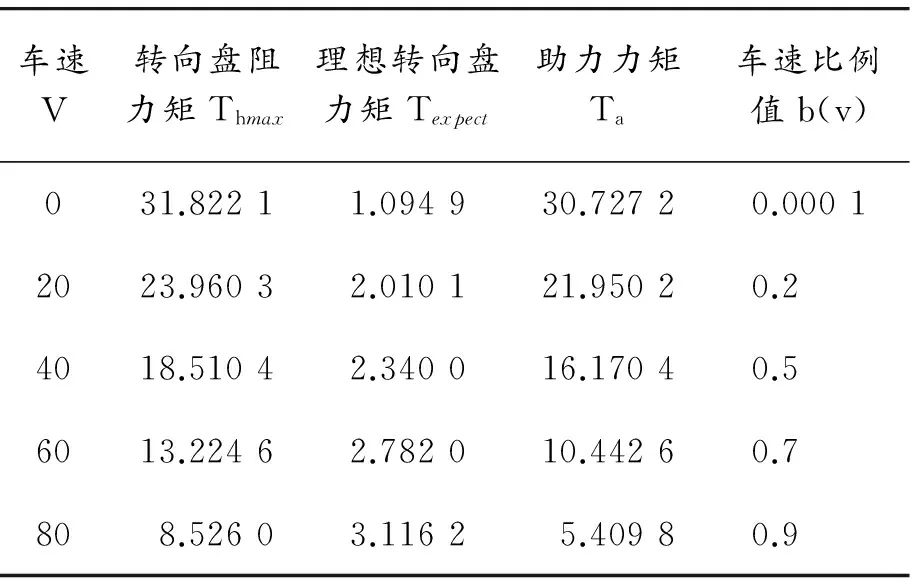
表2 特定车速下转向阻力矩、理想转向盘力矩、助力力矩及车速比例系数
该助力函数具有以下特点:① 曲线斜率随着车速增加而下降;② 曲线凹性随着车速增加逐渐增强;③ 车速为0时助力曲线为近似直线。
为了减少数据存储量,提高运算速度,加入车速感应系数K(V),它只在速度区间范围内起作用,且按车速分段拟合。设计过程如下:首先,a、c取值根据Td的取值范围和该车速下最大助力力矩Tamax(转向阻力矩与转向盘力矩的差值)求得,当车速超过80km/h后取消助力;其次,对应的线型满足车速下驾驶员理想转向盘力矩;最后,按车速区间范围的不同,分段用车速感应系数K(V)拟合。由此设计出如图4所示的助力曲线。可以看出,助力曲线随着车速的增加,由直线型逐渐向下凹性增强的曲线型转变,这与文献[4-5]论证过的助力曲线几何特征完全一致,验证了所设计的助力函数的合理性。
3 联合仿真试验
3.1联合仿真模型
将在MSC.ADAMS/CAR中建立的整车机械模型与Matlab中建立的PID控制器模型、电机模型、助力曲线模型进行联合仿真,联合仿真模型如图5所示。

图4 基于理想转向盘力矩特性的助力曲线
3.2转向轻便性试验
参照国标GB/T6323.5—94《转向轻便性试验方法》,汽车以10km/h按双纽线路径运行1周,记录无EPS和加入EPS后方向盘力矩随方向盘转角的变化关系。由图6可知:加入EPS后转向力大幅减小,由平均手力矩3.5N·m降低至2N·m。在较低车速下,装备EPS系统的车辆具有很好的转向轻便性。
3.3转向灵敏度试验
参照国标GB/T6323.2—94《转向瞬态响应试验》对转向灵敏度进行评价。当车速达到80km/h后迅速转动转向盘至预定角度并维持不变。由图7可知:加入EPS后系统稳定时间缩短至0.8s,超调量减小至1.1%,保证了汽车高速行驶的安全性。
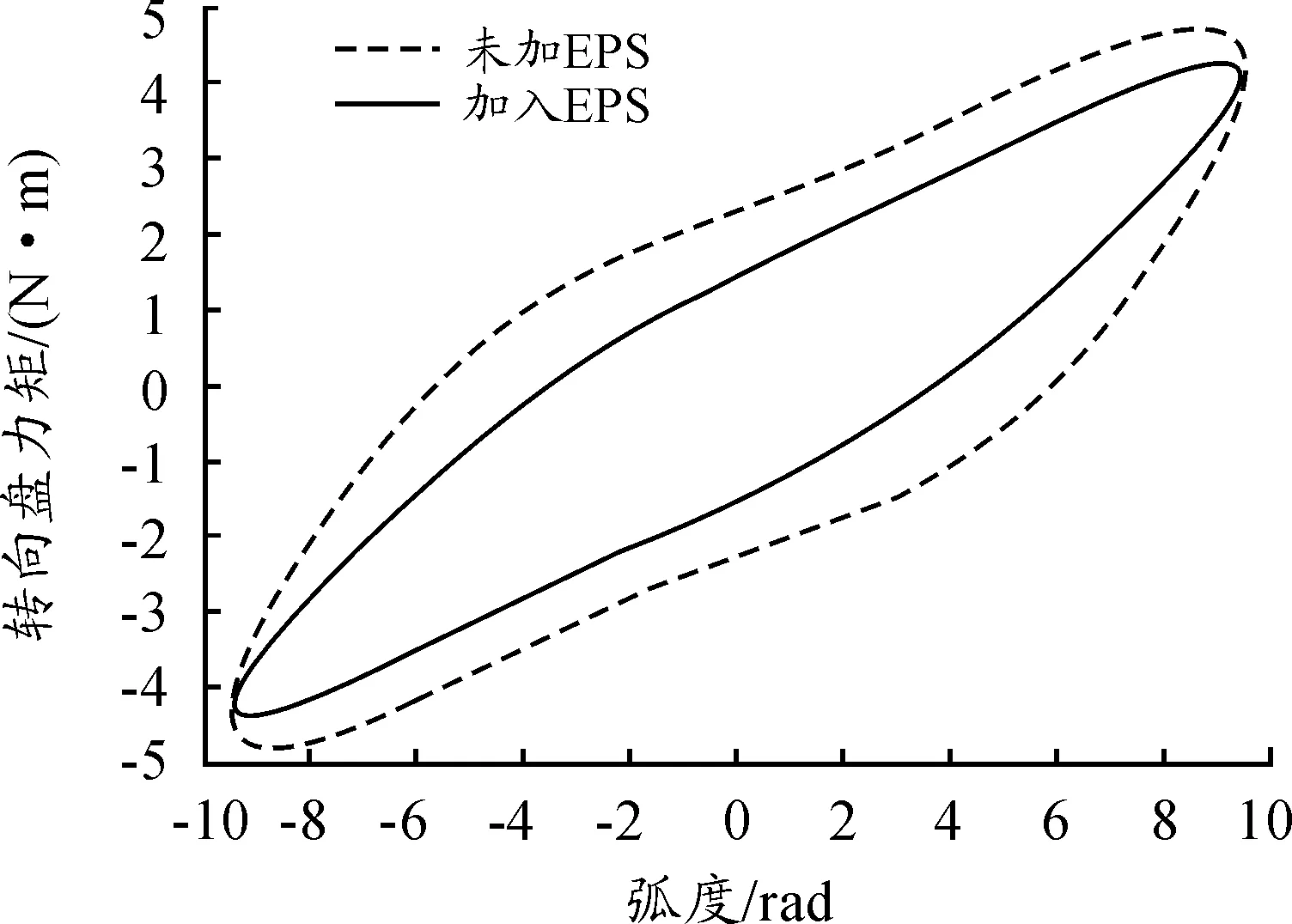
图6 轻便性试验仿真结果
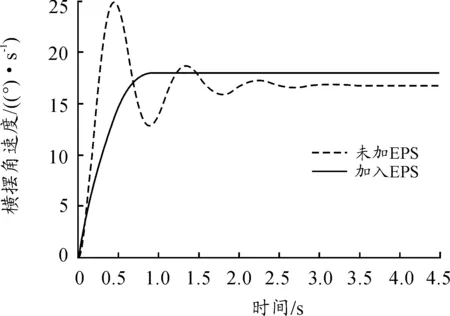
图7 灵敏度试验仿真结果
3.4路感验证
由图8幅频特性可以看出:谐振峰值不变,频带增加。表明系统失真小、阶跃响应上升时间短,调节时间短。由相频特性可以看出:车辆的相位滞后角逐渐增大,系统响应有所变慢。

图8 路感频率响应特性
4 结束语
电动汽车EPS设计过程中的首要任务是对电机助力曲线的设计。理想的助力曲线应能根据不同的车速协调转向轻便性与路感之间的矛盾。这种由直线型逐渐转变为下凹性增强曲线型的方程更适合EPS系统,能做到低速及原地转向时有比曲线型更好的转向轻便性,高速时有比直线型更好的路感。通过对理想转向盘力力矩特性的分析得到了低速段与高速段的驾驶员力矩,提出助力函数为指数函数形式。通过ADAMSCAR与Matlab联合仿真试验,验证了该助力曲线的可行性。
[1]李莉.转向力矩特性的分析与EPS助力控制策略的研究[D].上海:同济大学,2006:39-44.
[2]陈伟.基于ADAMS的电动助力转向系统助力特性研究[J].农业装备与车辆工程,2009(7):11-14.
[3]宗长富,麦莉,王德平.基于驾驶模拟器的驾驶员所偏好的转向盘力矩特性研究[J].中国机械工程,2007,18(8):1001-1005.
[4]任夏楠,邓兆祥.驾驶员理想转向盘力矩特性研究[J].中国机械工程,2014,25(16):2261-226.
[5]任夏楠,邓兆祥.汽车EPS助力特性设计方法研究[J].机械科学与技术,2014,33(8):1225-1232.
[6]刘照.汽车电动助力转向系统动力学分析与控制方法研究[D].武汉:华中科技大学,2005:65-74.
[7]欧阳伟,周兵,范璐.EPS新型助力特性曲线设计与研究[J].机械科学与技术,2013,32(11):1712-1716.
[8]何清华,何智成,方华,等.某微型客车EPS系统车速感应系数设计与评价研究[J].机械科学与技术,2014,33(3):404-408.
[9]LEEMH,HASK,CHOIJY,etal.Improvementofthesteeringfeelofanelectricpowersteeringsystembytorquemapmodification[J].JournalofMechanicalScienceandTechnology,2005,19(3):792-801.[10]张昕,施国标,林逸.电动助力转向中间位置转向感觉分析[J].公路交通科技,2009,26(7):139-148.
[11]赵景波,周冰,贝绍轶.电动汽车EPS系统阻尼工况Bang-Bang-PID控制[J].电机与控制学报,2011(11):95-100.
[12]赵景波,周冰,李秀莲,等.电动汽车EPS助力特性的设计及试验[J].电机与控制学报,2011(12):96-102.
[13]SHARP R S,GRANGER R.On car steering torques at parking speeds[J].J Automobile Engineering,2003,217(2):87-96.
[14]SALAANI M K,HEYDINGER G,PAUL G.Modeling and implementation if steering system feedback for the nation advanced driving simulator[R].USA:SAE Paper,2002.
[15]王鹏.汽车实时动力学仿真中转向回正特征建模方法研究[D].长春:吉林大学,2008:14-23.
[16]余志生.汽车理论[M].5版.北京:机械工业出版社,2010:176-183.
(责任编辑刘舸)
Study on Design and Evaluation of Assisted Characteristics Curve for EPS
ZHANG Yong-hui1,WANG Yue1,CHEN Ding-yue2, SHEN Fu-lin2
(1.Vehicle Engineering Department, Xi’an Aeronautical University, Xi’an 710077, China; 2.School of Automobile, Chang’an University, Xi’an 710064, China)
We analyzed the assist characteristic of electric power steering of the vehicle. Under different speeds, the ideal steering wheel torque of driver was changed with the steering wheel angle and lateral acceleration. We studied the ideal steering wheel torque model and established the ideal steering wheel torque models in high and low speed range. The ideal steering wheel torque model parameters in low speed range and its influence factors were analyzed. The vehicle model was built by ADAMS/CAR and Matlab, and the speed responding assist characteristic curve of passenger car was drawn up, and then the process assisted characteristic curve of electric power steering system was formed. The result showed that the assist curve meets the requirements of the automobile steering characteristic.
electric vehicle; electric power steering system; ideal steering wheel torque; assist characteristic curve; mathematical models
2016-02-18
陕西省科技攻关项目(2015GY053)
张永辉(1982—),男,陕西人,讲师,主要从事汽车电子控制技术研究,E-mail:19860399@qq.com。
format:ZHANG Yong-hui,WANG Yue,CHEN Ding-yue,et al.Study on Design and Evaluation of Assisted Characteristics Curve for EPS[J].Journal of Chongqing University of Technology(Natural Science),2016(9):33-37.
10.3969/j.issn.1674-8425(z).2016.09.005
U463
A
1674-8425(2016)09-0033-05
引用格式:张永辉,王悦,陈丁跃,等.电动汽车EPS助力曲线设计与评价研究[J].重庆理工大学学报(自然科学),2016(9):33-37.
猜你喜欢
英语世界(2022年9期)2022-10-18
金桥(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
商周刊(2017年17期)2017-09-08
作文周刊·小学一年级版(2017年27期)2017-08-10
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09