横向互联空气悬架车身高度调节模糊控制
2016-10-27 01:42琚龙玉任世恒周扬扬
重庆理工大学学报(自然科学) 2016年9期
琚龙玉,任世恒,周扬扬,李 美
(1.江苏大学 a.汽车与交通工程学院; b.机械工程学院,江苏 镇江 212013;2.海南大学 机电工程学院,海口 570228)
横向互联空气悬架车身高度调节模糊控制
琚龙玉1a,任世恒1a,周扬扬1b,李美2
(1.江苏大学a.汽车与交通工程学院; b.机械工程学院,江苏 镇江212013;2.海南大学 机电工程学院,海口570228)
为解决横向互联空气悬架因结构特点难以充分发挥车身高度调节优势的问题,构建了专门适用于横向互联空气悬架车身高度调节控制策略。针对系统非线性与时滞性引起的车身高度超调现象,设计了车身高度模糊控制器。整车采用2个二维模糊控制器对前后空气弹簧进行控制:前空气弹簧控制输入以目标高度为基准,解决调节过程中超调明显等问题;后空气弹簧控制输入以前空气弹簧处实际车身高度变化为基准,提高高度调整过程中车身姿态的稳定性。结果表明:前后控制器分工协作不仅有效解决了调节过程中出现的超调现象问题,而且保证了车身姿态的稳定性。
空气悬架;横向互联;车身高度调节;车身姿态;模糊控制
空气悬架以空气弹簧作为弹性元件,利用气体的可压缩性实现其弹性作用,能满足车辆行驶平顺性和操纵稳定性的双重需求,因而得到广泛应用。车身高度调节是空气悬架的主要功能之一。系统根据驾驶员意图和车辆实际行驶状况,主动调节空气弹簧内气体质量,从而实现车身高度的自适应调整[1-2]。徐兴等[3]针对车身高度调节过程中存在的“过充”、“过放”以及振荡现象,提出变速积分PID/PWM高度控制策略,并进行了仿真和台架试验,结果表明,提出的控制策略能够满足车身高度调节要求。Hyunsup Kim等[4]提出一种车身高度与车身姿态调节的非线性控制方法,采用滑模控制来提高控制精度和克服空气悬架系统的非线性与参数不确定性,研究结果表明:该控方法能实现车身高度稳定调节。赵玉壮等[5]将空气悬架系统充放气非线性模型通过状态反馈进行全局线性化,在线性域中设计滑膜控制器,仿真结果表明:基于状态反馈线性化方法设计的滑膜控制器能有效克服充放气过程的非线性特性。
随着汽车技术的发展,将前后轴原本相互独立的空气弹簧用管路连接构成横向互联空气悬架,当受到路面冲击时,连通的空气弹簧间相互充当附加气室,可起到缓和路面冲击、保持车身姿态等作用[6]。然而将现有空气悬架车身高度控制策略应用于横向互联空气悬架系统时,由于载荷分布不均及质量流量的时变特性,连通的空气弹簧之间气体频繁交换,充放气难以停止,导致车身高度调节功能失效。但单纯实现互联而放弃车身高度调节的能力得不偿失,为此,需构建专门适用于横向互联空气悬架的车身高度控制策略。因此,在横向互联空气悬架充放气结构的基础上建立整车车身高度调节数学模型,设计车身高度模糊控制策略,解决超调明显、调节时间过长等问题,同时,改善因高度调节不同步导致的车身姿态恶化现象。
1 系统设计
1.1系统工作原理
横向互联空气悬架将前后同轴的空气弹簧用管路连接,连通的空气弹簧之间气体可自由交换,在传统充放气系统基础上进行改进,提出对互联空气弹簧同时控制的充放气系统,并在不同管路中安装充放气电磁阀,通过控制对应电磁阀开闭调节车身高度。横向互联空气悬架充放气系统工作原理如图1所示。
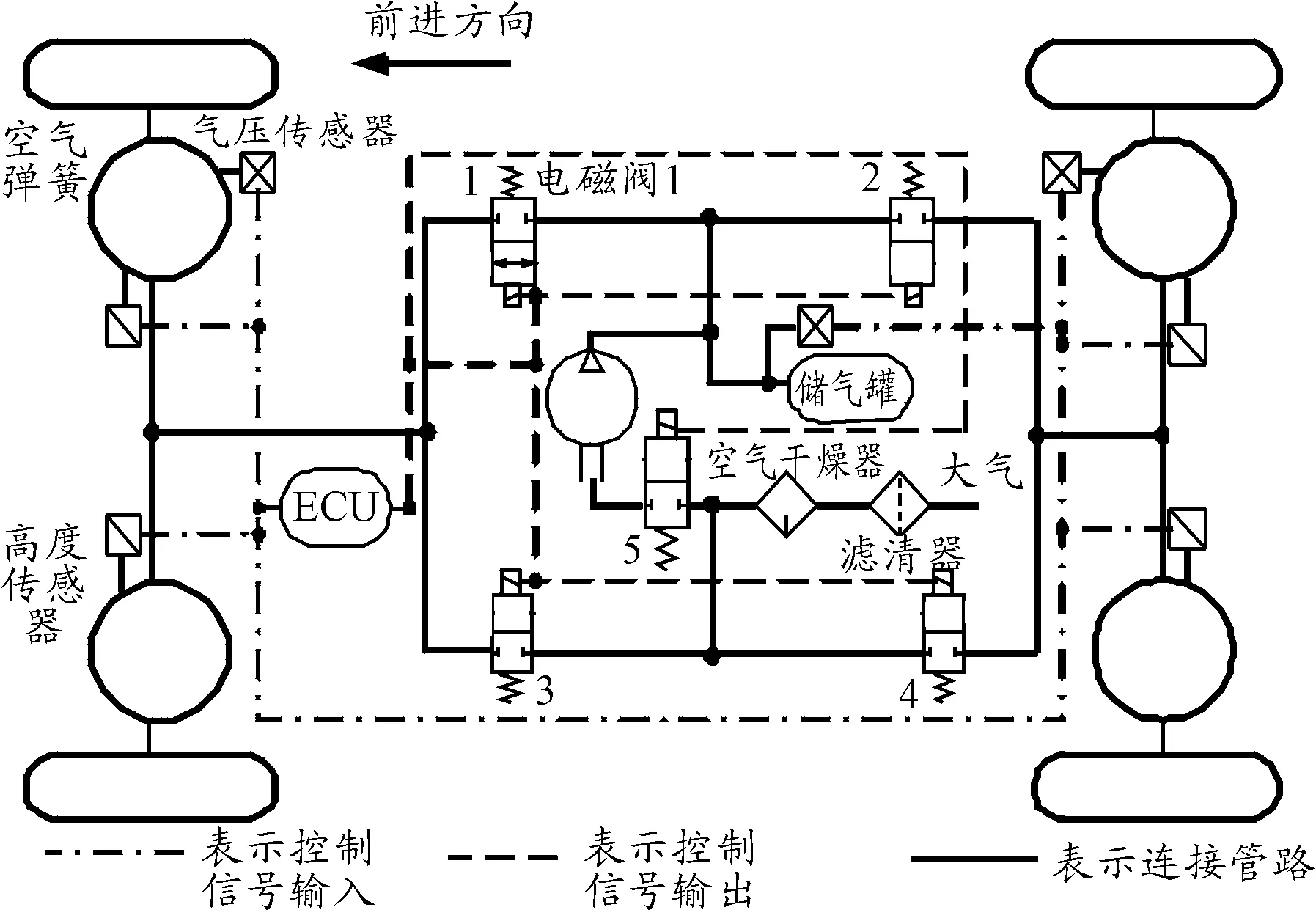
图1 横向互联空气悬架充放气系统工作原理
ECU根据输入信号判断车辆状态,其中输入信号包括前右、后右2个气压传感器实时采集的空气弹簧气压信号,以及4个高度传感器采集的高度信号。当车辆状态对车身高度有需求时,ECU按照内部设定逻辑单元,触发对应充放气电磁阀,完成车身高度调节过程。电磁阀1和2为充气电磁阀,电磁阀3和4为放气电磁阀。储气罐作为车身升高的气源,当储气罐内气体不足以提升车身高度至目标高度时,ECU控制电磁阀5和空压机同时开启,使储气罐内气体保持一定的压力[7-8]。
1.2系统充放气数学模型
储气罐与空气弹簧进行气体交换的过程很快,可视为定容积的绝热放气过程,其数学模型由变质量系统热力学第一定律得到[9]:
(1)
式中:k为绝热系数;R为气体常数;T1为储气罐内的气体温度;qm1为放气时的质量流量;V1为储气罐容积;P1为储气罐绝对气压。
电磁阀控制质量流量可等效抽象为节流小孔,根据节流孔上游压力与下游压力差,其流量公式为:
(2)
式中:A为电磁阀有效流通面积;T为对应Pup端的气体温度;Pup为上游绝对气压;Pdn为下游绝对气压;qmi为充放气质量流量。β为临界压力比,β=0.528。
在充放气过程中,空气弹簧压力、容积均发生变化,可视为变容积的绝热充放气过程,其动态充放气模型为
(3)
式中:Ti(i=1,2,3,4)为4个空气弹簧内的气体温度;Pi为4个空气弹簧绝对气压;Vi为4个空气弹簧初始容积。
1.3整车动力学模型
仅分析横向互联空气悬架系统驻车工况下的车身高度调节,忽略簧下质量及路面激励对车身高度变化的影响,则空气弹簧高度变化即为车身高度变化量[10]。由于转向或载荷不均引起的侧倾可通过设计主动横向稳定杆加以抑制。为研究方便,假设横向互联空气悬架整车系统中同轴相互连通的空气弹簧气压相等,充放气过程中高度变化一致,侧倾角变化很小,因此,不考虑侧倾角将恶化车身高度调节的影响。依据车辆系统动力学和牛顿运动定律,建立整车车身高度调节数学模型运动方程:
式中:Mb为整车簧载质量;Zb为车身质心位移;Fi为4个悬架受到的作用力;Pa为大气气压;Aei为4个空气弹簧的有效面积;Mi为4个空气弹簧处的承载质量;g为重力加速度;Ci为4个减振器阻尼系数;Zi为4个空气弹簧处位移;Iy为关于y轴转动惯量;θ为俯仰角;a为前轴到质心的距离;b为后轴到质心的距离。
2 车身高度调节控制
空气悬架充放气系统各组成部分具有较强的非线性特性,开环开关控制不仅难以实现车身高度的精确调节,还会导致系统出现“过充”、“过放”现象。而且线性控制方法难以适应非线性系统参数变化。
模糊控制以模糊语言变量规则为基础,诠释非线性系统特性,具有良好的控制效果[11-12]。
2.1模糊控制设计
将前左、前右连通的空气弹簧统一为前空气弹簧,后左、后右连通的空气弹簧统一为后空气弹簧,其高度变化为互联空气弹簧之间高度变化的平均值。由于前后空气弹簧承载量不同,以及质量流量之间的相互影响、管路的时滞效应也不相同,必将引起前后调节不同步,车身姿态在调节过程中严重恶化[13]。因此,构建专门适用于横向互联空气悬架的车身高度跟踪控制策略。整车采用2个二维模糊控制器对前后空气弹簧进行控制:前空气弹簧模糊控制器以车身高度调节过程中的前空气弹簧处实际车身高度与目标高度的差值作为调节依据;后空气弹簧模糊控制器实时跟踪前空气弹簧处车身高度变化,缓和调节过程中车身姿态恶化现象。
图2为设计的整车模糊高度跟踪控制器结构。

图2 整车模糊高度跟踪控制器结构
图2中Ef和ECf分别为前空气弹簧处实际车身高度与目标高度偏差与偏差变化率经量化因子Ke1和Kec1模糊化后得到的输入模糊变量,经过模糊推理模块后得到输出模糊变量Uf,经过量化因子Ku1清晰化处理后转化为精确量质量流量qmf;后空气弹簧模糊化过程相同。
1) 前空气弹簧模糊设计
前空气弹簧处车身高度偏差及其偏差变化率的基本论域为:[-0.02,0.02]m和[-0.01,0.01]m/s,质量流量作为输出,基本论域为:[-1.2×10-8,1.2×10-8]m3/s。 模糊论域分别为[-6,6],[-5,5]和[-6,6]。前空气弹簧实际车身高度作为后空气弹簧调节的参考基准,应保证较高的调节精度,模糊子集都取为:{NB,NM,NS,Z,PS,PM,PB}。同时为区分精调与粗调,高度偏差小时减小模糊密度。图3为输入输出隶属度函数。

图3 输入输出隶属度函数
为实现车身高度的精确调节,根据系统的工作特点,其基本原则为:高度偏差较大时,输出较大的质量流量,减少调节时间;高度偏差较小时,输出较小的质量流量,保证调节精度。输出模糊变量Uf如表1所示。

表1 输出模糊变量Uf
2) 后空气弹簧模糊设计
后空气弹簧与前空气弹簧处车身高度偏差及其偏差变化率的基本论域为:[-0.001,0.001]m和[-0.015,0.015]m/s,质量流量作为输出,基本论域为:[-1.2×10-8,1.2×10-8]m3/s。模糊论域分别为[-5,5],[-5,5]和[-6,6]。兼顾控制精度和计算方便,模糊子集都取5个等级,隶属函数都为三角形。输出模糊变量Ur如表2所示。
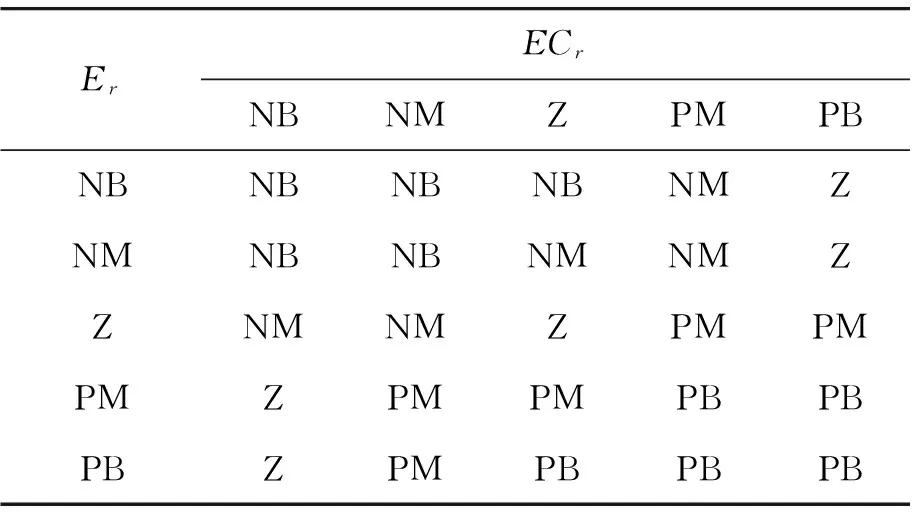
表2 输出模糊变量Ur
2.2PWM调制的实现
高速开关电磁阀只能在开和闭之间进行离散切换,限制质量流量无级可调,因此,采用PWM脉宽调制方式将质量流量大小转化为对应PWM占空比大小。
高速开关电磁阀静态特性包括死区,即当控制器的输出小于某一值时,电磁阀将不起开关作用[14]。同时设定高度死区,当高度偏差位于高度死区范围内时,停止车身高度调节。其中,高度死区指输入信号变化而输出信号没有相应变化的高度区间。规定调节结束后的实际高度与目标高度偏差在2%以内视为满足控制要求。
车身高度模糊控制系统运用“Mamdani”方法,运用“max-min”进行推理,运用重心法去模糊化[15]。
3 仿真分析
基于Matlab/Simulink搭建横向互联空气悬架车高调节控制系统,对系统控制性能进行验证。为对比控制器控制效果及控制精度,同时设计开环开关控制和常规PID控制器。根据文献[16]利用Z-N法可整定得到车身高度抬升过程PID参数为:Kp= 11,Ki=0.2,Kd=1;车身高度降低过程PID参数:Kp= 30,Ki=1,Kd=6。
以前空气弹簧处车身高度变化为对象,设高度在低位(-20 mm),中位(0 mm)和高位(20 mm)三挡进行切换。仿真时间设置为10 s,仿真步长为0.01。仿真参数参考某型轿车设置,见表3。图4为整车车高模糊仿真系统。
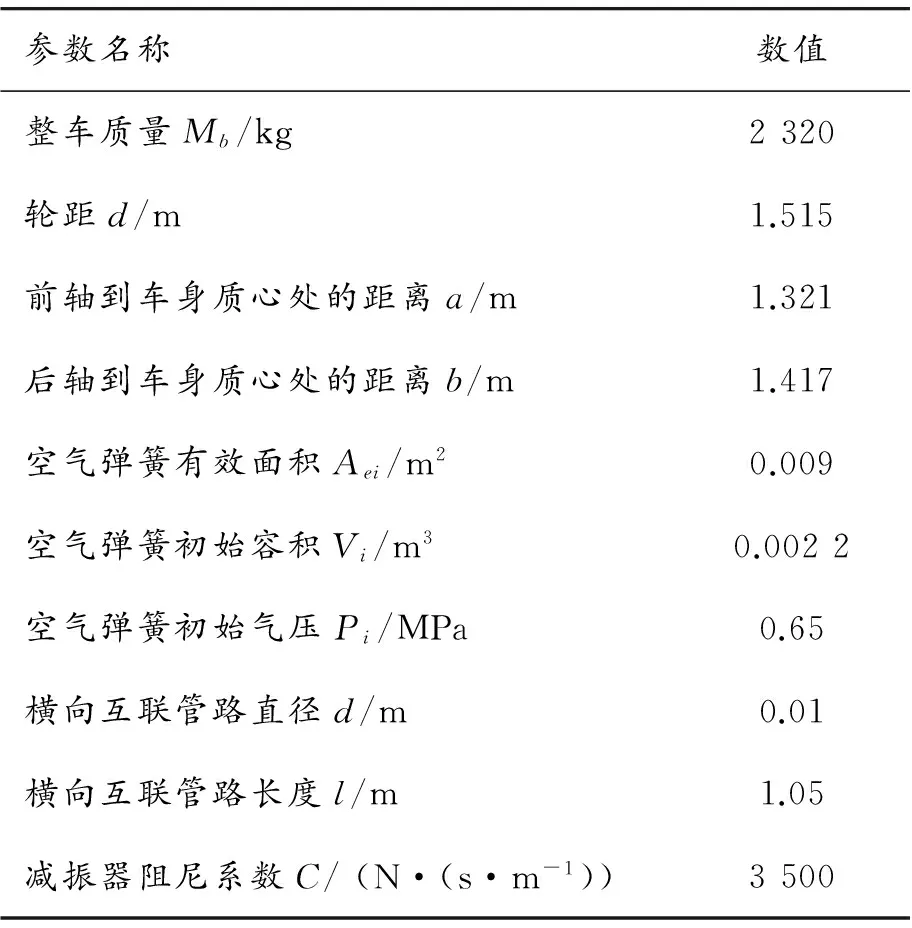
表3 整车参数
图5中(a)和(b)为采用3种不同控制策略前空气弹簧处车身高度在中位与高位之间的调节结果,其余高度之间的切换调节机理相同,故仅以中位和高位间的调节结果进行分析。由图5可知:与开环开关控制相比,PID与模糊控制能有效抑制调节过程中超调明显等问题;与PID控制相比,模糊控制下的车高动态响应更加快速。
图6为后空气弹簧模糊控制器以不同参照从中位抬升至高位过程中车身俯仰角的对比曲线。由仿真结果可知:以前空弹簧处实际车身高度作为后空气弹簧控制器输入能有效缓解车身高度调节过程中车身姿态恶化的现象。
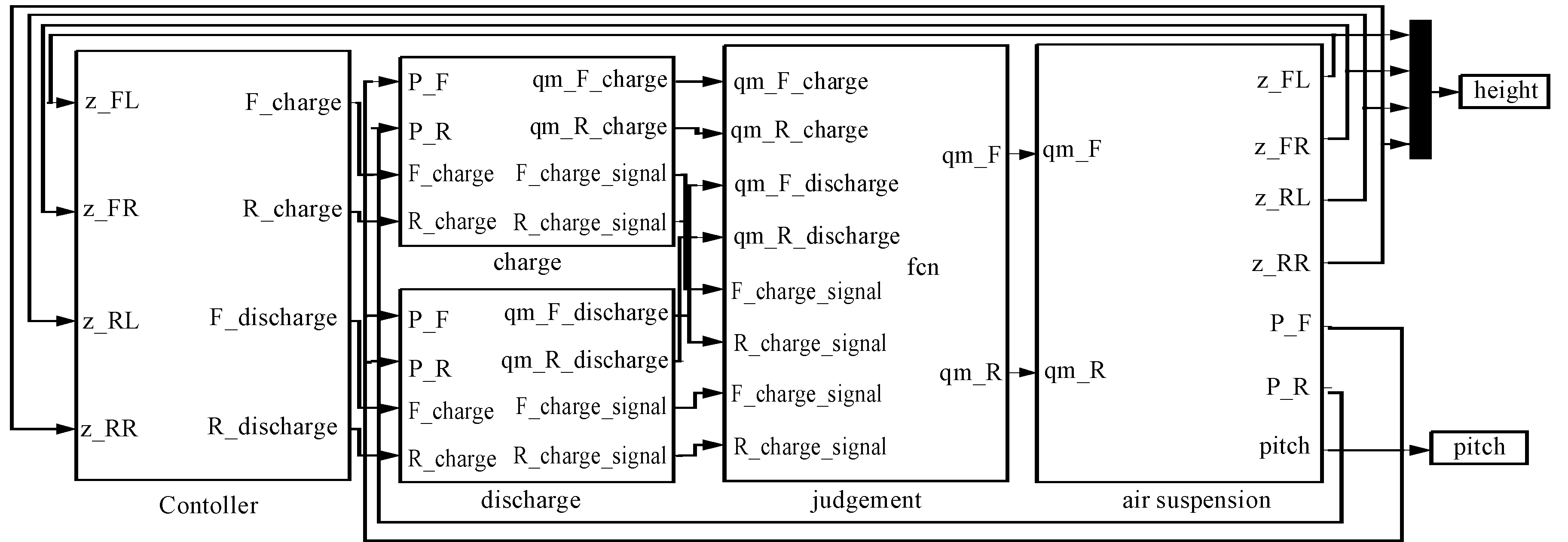
图4 整车车高模糊仿真系统
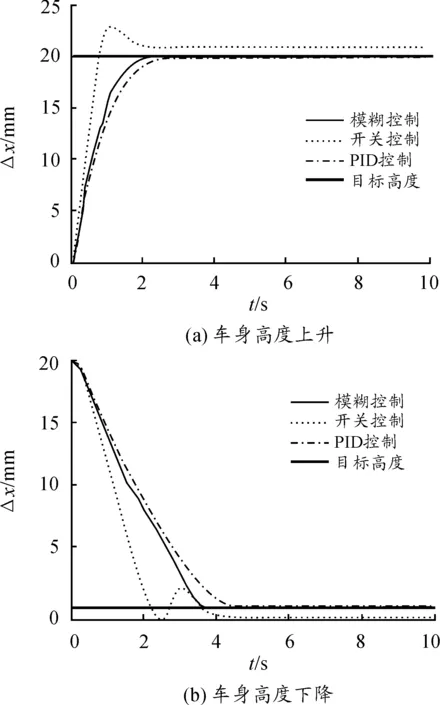
图5 前空气弹簧处车身高度仿真结果

图6 车身俯仰角对比曲线
车身高度在中位和高位之间的调节结果如图7所示。从仿真结果可知:该模糊控制策略能快速准确地将车身高度调节至目标高度,车身姿态在调节过程中得到明显改善,且系统相对稳定。

图7 整车高度动态曲线
4 结论
1) 前空气弹簧模糊控制器以目标高度为基准,在调节过程中可保证调节精度;
2) 后空气弹簧以前空气弹簧处实际车身高度为基准,前后高度偏差逐渐减小,可提高在车身高度调节过程中车身姿态的稳定性。
[1]黄启科,麻友良,王保华.汽车电控空气悬架发展与研究现状综述[J].湖北汽车工业学院学报,2013,27(2):27-33.
[2]江洪,李坤,周文涛,等.ECAS系统控制模式及控制策略[J].机械工程学报,2009,45(12):224-231.
[3]HYUNSUP K,HYEONGCHEOL L.Height and leveling control of automotive air suspension system using sliding mode approach[J].Vehicle Techology,IEEE Transactions on,2011,5(60):2027-2040.
[4]徐兴,陈照章,黄俊明,等.电控空气悬架充放气的动态建模及特性仿真[J].系统仿真学报,2011,23(6):1225-1228.
[5]赵玉壮,王宗成,陈思忠.基于滑膜控制的空气悬架车高控制系统研究[J].北京理工大学学报,2014,34(11):1125-1129.
[6]李仲兴,崔振,徐兴,等.互联式空气悬架动态特性试验研究[J].科学技术与工程,2014,14(14):82-86.
[7]何二宝.电控闭环空气悬架系统车高控制与节能研究[D].广州:华南理工大学,2012.
[8]窦辉,陈龙,汪少华,等.电控闭式空气悬架车高调节控制研究[J].机械设计与制造,2014(9):171-174.
[9]沈维道,童钧耕.工程热力学[M].北京:高等教育出版社,2007.
[10]冯元元,杜群贵.半挂车电控空气悬架车高调节模糊与PWM控制研究[J].科学技术与工程,2010,10(32):7974-7979,7992.
[11]徐兴.ECAS客车车身高度非线性系统控制的研究[D].镇江:江苏大学,2010.
[12]陈玲,佘亮,车玲玲.基于AMESim的封闭式空气悬架系统车高控制研究[J].机床与液压,2013,41(11):86-88,175.
[13]BU Wenjun,HE Lin,SHAN Shujun.Attitude control of air spring mounting system based on fuzzy control[J].International Design Engineering Technical Conferences & Computer and Information in Engineering Conference,2007(4):1-6.
[14]潘小旺,林敏,郭斌,等.气动电磁阀动态特性仿真与试验研究[J].中国计量学院学报,2010,21(3):232-236.
[15]范方强,潘公宇.变刚度和阻尼半主动悬架的模糊控制研究[J].重庆交通大学学报,2012,31(3):482-500.
[16]沈承,黄光宏,曹世宏,等.PID控制系统的参数调节技巧[J].机械工程与自动化,2008(4):155-156.
(责任编辑刘舸)
Fuzzy Control of Body Height Adjustment for Vehicles with Laterally Interconnected Air Suspension System
JU Long-yu1a,REN Shi-heng1a,ZHOU Yang-yang1b,LI Mei2
(1.a.School of Automotive and Traffic Engineering; b.School of Mechanical Engineering, Jiangsu University, Zhenjiang 212013, China; 2.Mechanical and Electrical Engineering College, Hainan University, Haikou 570228, China)
In order to overcome the defect or difficulty of making full use of height adjustment due to structure characteristics of laterally interconnected air suspension, body height adjustment strategy specific for laterally interconnected air suspension was established. To solve the problem of overshoot caused by the nonlinearity and time lag of air suspension system during height adjustment, fuzzy height controllers were designed. Two two-dimensional fuzzy controllers were applied respectively to control the front and rear air springs: the input of the front controller was determined by target height which can improve the precision of adjustment, while the input of rear controller was determined by the actual body height in front air spring, thereby enhancing the stable performance problem of body posture during height adjusting. The results show that the front controller is in collaboration with the rear controller. Also, the problem of overshoot is alleviated and the body posture keeps stable.
air suspension; laterally interconnected; height adjustment; body attitude; fuzzy control
2016-02-08
国家自然科学基金资助项目 (51575241); 国家自然科学基金青年科学基金资助项目(51305111);江苏省普通高校研究生科研创新计划项目(KYLX_1058)
琚龙玉(1988—),男,河北人,博士研究生,主要从事新型空气悬架结构、特性与控制理论研究,E-mail:570766928@qq.com。
format:JU Long-yu,REN Shi-heng,ZHOU Yang-yang,et al.Fuzzy Control of Body Height Adjustment for Vehicles with Laterally Interconnected Air Suspension System[J].Journal of Chongqing University of Technology(Natural Science),2016(9):3-9.
10.3969/j.issn.1674-8425(z).2016.09.001
U463.33+4.2; TP272
A
1674-8425(2016)09-0003-07
引用格式:琚龙玉,任世恒,周扬扬,等.横向互联空气悬架车身高度调节模糊控制[J].重庆理工大学学报(自然科学),2016(9):3-9.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
北京汽车(2016年6期)2016-10-13
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
现代制造技术与装备(2015年4期)2015-12-23