机电控制无级变速器控制单元硬件在环测试系统
2016-10-27 01:42夏超,李鑫,程越
重庆理工大学学报(自然科学) 2016年9期
夏 超,李 鑫,程 越
(重庆理工大学 a.车辆工程学院;
b.汽车零部件先进制造技术教育部重点实验室,重庆 400054)
机电控制无级变速器控制单元硬件在环测试系统
夏超a,李鑫b,程越b
(重庆理工大学a.车辆工程学院;
b.汽车零部件先进制造技术教育部重点实验室,重庆400054)
介绍了基于LABCAr硬件在环测试系统的搭建方法及系统调试方法。以机电控制无级变速器控制单元为测试对象,通过对TCU的需求分析,搭建了基于LABCAR测试平台的硬件在环测试系统。该系统满足TCU基本功能、控制策略、故障诊断的测试要求,同时具备了系统实时性、开放性和可扩展性。
硬件在环;机电控制无级变速器;TCU;LACBCAR
采用全新技术的机电控制无级变速器(electronic-mechanical continuously variable transmission,EMCVT)抛弃了传统金属带式无级变速器中泵、阀、液力变矩器等高能耗、高故障率和高成本的液压系统,以电机、齿轮系和螺旋弹簧等组成的变速机构进行无级调速[1-9],实现汽车传动系统与实际工况的最佳匹配,从而提高能量转化效率、降低整车能耗。EMCVT控制器是实现EMCVT与发动机最佳匹配的关键,实质是通过控制离合器电机和调速电机使EMCVT具有最佳传动效率。
硬件在环仿真测试为现今控制器开发必不可少的环节。LABCAR是德国ETAS公司开发的硬件在环仿真测试系统[2]。它是一部虚拟的实验室汽车,与真实的汽车一样能接收控制器发出的控制信号,根据信号特征快速作出响应,向控制器传输当前运行状况的信号。通过该测试系统可以尽早发现控制系统软硬件出现的不足,取代台架及实车测试,降低了开发成本,提高了开发效率,缩短了开发周期,保证了控制系统的安全性和功能性。
1 测试系统需求分析及方案确定
TCU硬件在环仿真测试利用EMCVT仿真模型来表现实际变速器的特性,将EMCVT模型化,进而构建一个虚拟的测试环境,为TCU的开发、测试提供一个平台。在该平台上,要求能模拟车辆行驶的各种复杂工况,满足TCU控制功能的测试需求,完全集成Matlab/Simulink,且最大程度地与已有模型或第三方模型兼容。同时要求在高速仿真时,测试人员可以通过对上位机监控面板上的实验参数进行修改,实现变速器运行工况的改变,并且可以实时跟踪TCU的输出结果变化,对TCU进行功能逻辑、控制策略、故障诊断的测试。同时,可以对TCU产生的各种反馈信号进行读取、存储、分析。
硬件在环测试系统不仅要为TCU提供测试环境,还要实现对TCU的调试与测试。由于TCU由硬件和软件2部分组成,因此,测试系统要实现对TCU软件的调试和软硬件的测试。硬件测试是在TCU测试程序的支持下,测试控制器的各个模块硬件是否正常工作,包括MCU是否正常工作、TCU的输入电路能否检测到各个传感器的输出信号、TCU的输出电路能否正确驱动各个执行器、通信模块是否能正常通讯等。软件测试包括TCU能否正确识别各个传感器信号所包含的信息、TCU的控制策略是否正常合理等。因此,从实际工程应用的角度考虑,测试系统必须满足系统的实时性、开放性和可扩展性。
根据以上需求建立硬件在环测试系统,完成硬件选型、线束设计、软硬件配置、实时仿真模型的建立等系统搭建工作,在此基础上,完成系统闭环调试工作。
2 LABCAR硬件在环系统
LABCAR硬件在环仿真测试系统如图1所示。LABCAR系统由硬件系统和软件系统两大部分组成。硬件系统主要由仿真工控机、断接盒面板、IO信号板卡箱、负载板卡箱、故障注入单元、可编程电源组成。软件系统则由系统仿真模型、上位机操作软件Labcar OPERATOR组成[3]。图2为EMCVT 控制器基于LABCAR HIL系统的总体架构。
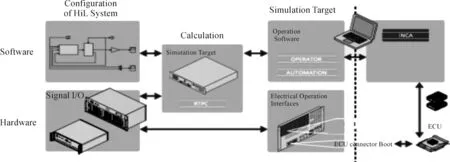
图1 LABCAR硬件在环仿真测试系统
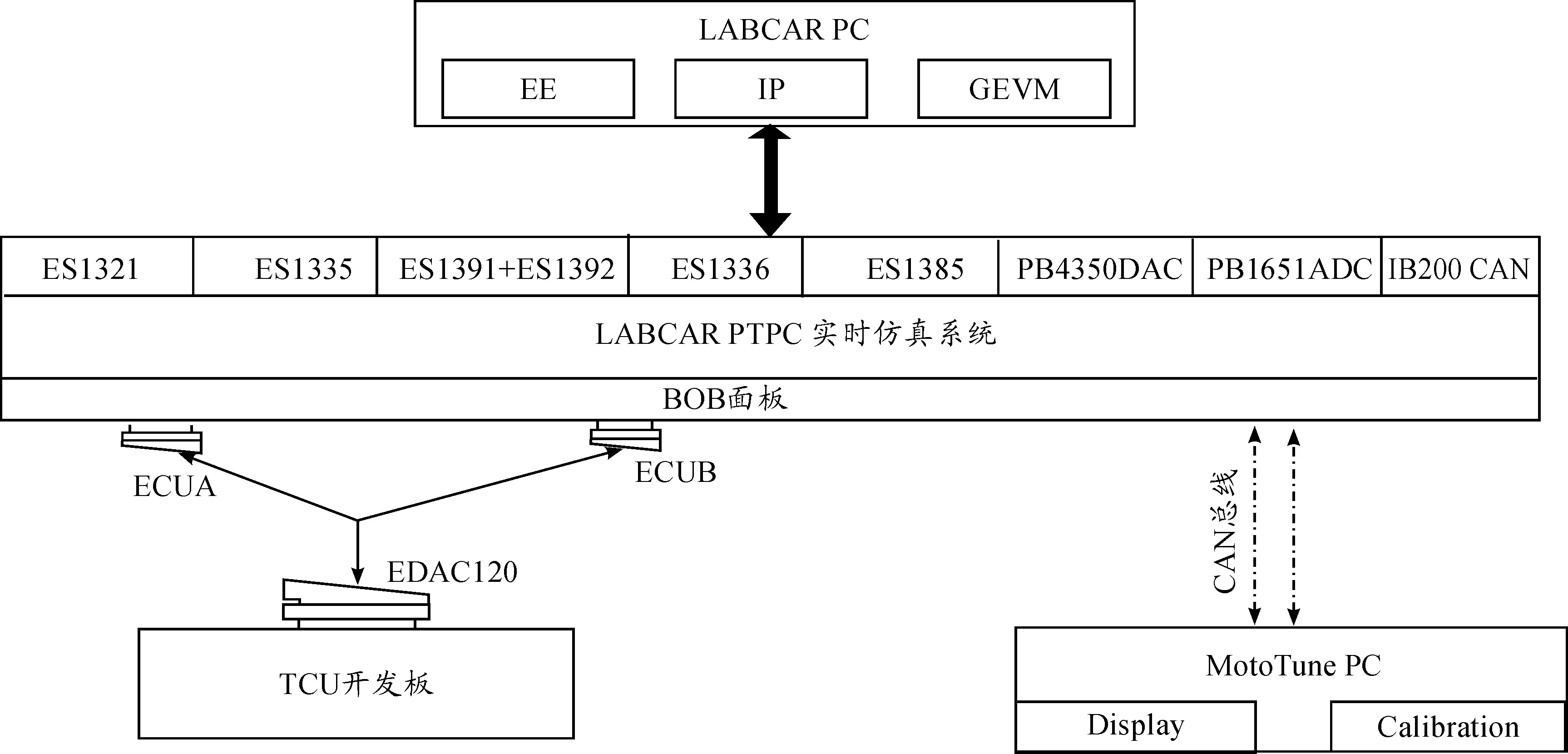
图2 LABCAR系统总体架构
2.1硬件系统
1) 仿真工控机RTPC
LABCAR所用仿真工控机为运行实时操作系统Linux的标准PC,用来进行仿真模型运算。
2) 断接盒面板ES4640
ES4640的主要功能是与ECU相连,为各种信号类型提供标准的信号接口。ES4640与系统搭建和调试相关的接口是前面板和后面板。前面板为各种相关信号提供断接功能,后面板为各种负载提供连接端口。前面板背面的信号端子跟ES4440连接支持故障注入功能,同时前面板背面也提供了跟板卡箱ES4100的内部线束连接。
3) I/O信号板卡箱ES4100
ES4100板卡箱含有21个VME板卡插槽,可根据ECU信号需要灵活配置IO板卡。表1展示了VME板卡的种类。

表1 VME板卡的种类
4) 负载板卡箱ES4408
负载箱ES4408为硬件在环系统下的电控单元ECU测试提供电负载,包括仿真电磁阀喷油器和大量的电流源负载,而且还配有大量的上拉、下拉负载。ES4408可安装12张负载板卡。负载箱背面安装有以太网联接接口ES4408CON,用户通过此接口对负载配置进行控制。内部控制器监控所有内部功能,便于对控制信号和参数进行扫描。此外,ES4408配有通用电源。
5) 故障注入单元ES4440
ES4440主要用于ECU信号的电气故障注入,可独立使用或与硬件在环测试系统结合使用。ES4440.1具有CAN和以太网接口,用于远程控制故障模拟模块。ES4440能支持的故障类型有对地/电源/其他信号短路、断路、虚接、漏电流等。一个故障注入单元最多支持16路高电压和64路大电流的故障模拟。如通道数不够,系统支持多个ES4440的级联。
6)可编程电源LAMBDA 50-30
LABCAR系统标配的电源是可编程直流电源LAMBDA50-30,电压调节范围为0~50 V,电流范围为0~30 A。系统主要利用电源控制板卡ES1391.1来控制直流电源的输出,利用大电流开关板卡ES1392.1来管理各节点的供电。
2.2软件系统
LABCAR上位机操作软件主要包括用于系统集成和手动测试的LABCAR Operator(LCO)软件和用于故障注入控制的Pin Control软件。
1) LABCAR Operator软件
LABCAR系统的用户界面软件LABCAR Operator的LCO IP用于系统配置工作,并和LCO EE(图3)一起完成实验的建立和运行。LABCAR软件运行于装有Windows的 PC。
LCO IP提供了系统用户界面来配置LABCAR的硬件,建立模型和硬件之间的信号连接,并生成测试代码,下载到RTPC中执行。用于CAN总线模拟的配置工作也用这个软件完成。该模型的硬件配置严格分离,确保各个项目的高度可重用性。
LCO EE提供了测试执行的用户界面。该界面实现了实验和图形用户界面、集成的参数和数据管理、代码下载、实验执行、实时信号产生和测量数据记录,以及信号管理等功能。

图3 LCO EE
LABCAR的实验环境可以显示CAN报文的特殊图形用户界面。在模拟过程中,信息信号值的简单操作通过图形界面显示,可输入值为十进制或十六进制。同时 LABCAR插件NIC提供了定制的C代码在CAN消息发送和接收程序的可能性。
2) Pin Control软件
LABCAR-Pin Contro为ES4440的上位机软件,具有方便用户使用的接口,可实现ES4440的手动操作。软件可实现的功能如下:① 创建并管理故障模式,产生ECU信号的一系列故障;② 简化故障仿真信号的选取;③ 设置故障产生的时间;④ 通过点击鼠标来触发故障;⑤ 设置多台ES4440同时使用;⑥ 提供自动化测试的API接口。
3) ECU线束设计
ECU线束设计是系统供电、模数信号传输、通讯传输的桥梁。线束繁多杂乱,所以对线束的设计尤为重要。ECU与LABCAR的线束连接如图4所示。
线束设计的基本原则:① 根据ECU确定是否制作一条线束,或制作分段式线束;② 评估ECU工作电流,合理分配供电节点,注意常电、主继电器、各节点的连接关系;③ 转速传感器的通道选择与ECU处理转速的方式有关,根据需要可选择ES1335通道和ES1321通道;④ 角位移传感器的通道通常选择DA通道;⑤ 换挡器输出的通道通常选择DO通道;⑥ 电机控制信号的通道选择与是否外接负载有关,如果外接负载,需选择与LOAD1-LOAD8对应的通道,如果不外接负载,可任意选择DI通道连接;⑦ 需要考虑DI/DO信号参考的选择和连线。

图4 线束连接
2.3LABCAR系统配置
LABCAR系统配置的主要任务是在硬件系统完成搭建和连线正确的基础上进行软件配置,保证各通道信号按照设计需求与ECU正常交互。 LABCAR-RTC是LCO软件中进行硬件模块集成和配置的插件,RTIO编辑器是该插件在LCO软件中的用户编辑界面。
表2列出了本项目硬件系统中配置的部分I/O板卡类型和功能。以下对本项目系统部分板卡功能及配置作简要说明。
1) ES1391电源控制板卡
Pwrctrl用于电源控制。ES1391最多支持2个通道的电源控制。由于硬件系统使用的是Delta电源,根据电源类型只能选择Other Power Supply Types。除此以外,根据需要限制输出电压和输出电流。
Swctrl用于对ES1392的节点开关控制。DigOutCtrl_0-DigOutCtrl_4为电源节点的使能标志,根据Spec定义, DRVPA和DRVPB由主继电器控制,而ES1392内置继电器可作主继电器功能。
2) ES1321数字/PWM信号输入/出板卡
ES1321信号连接关系如表3所示,其中:输入信号有2种类型:数字输入和占空比输入;输出信号有2种类型:数字输出和频率输出。每块ES1321板卡为输入和输出分别提供2路参考。
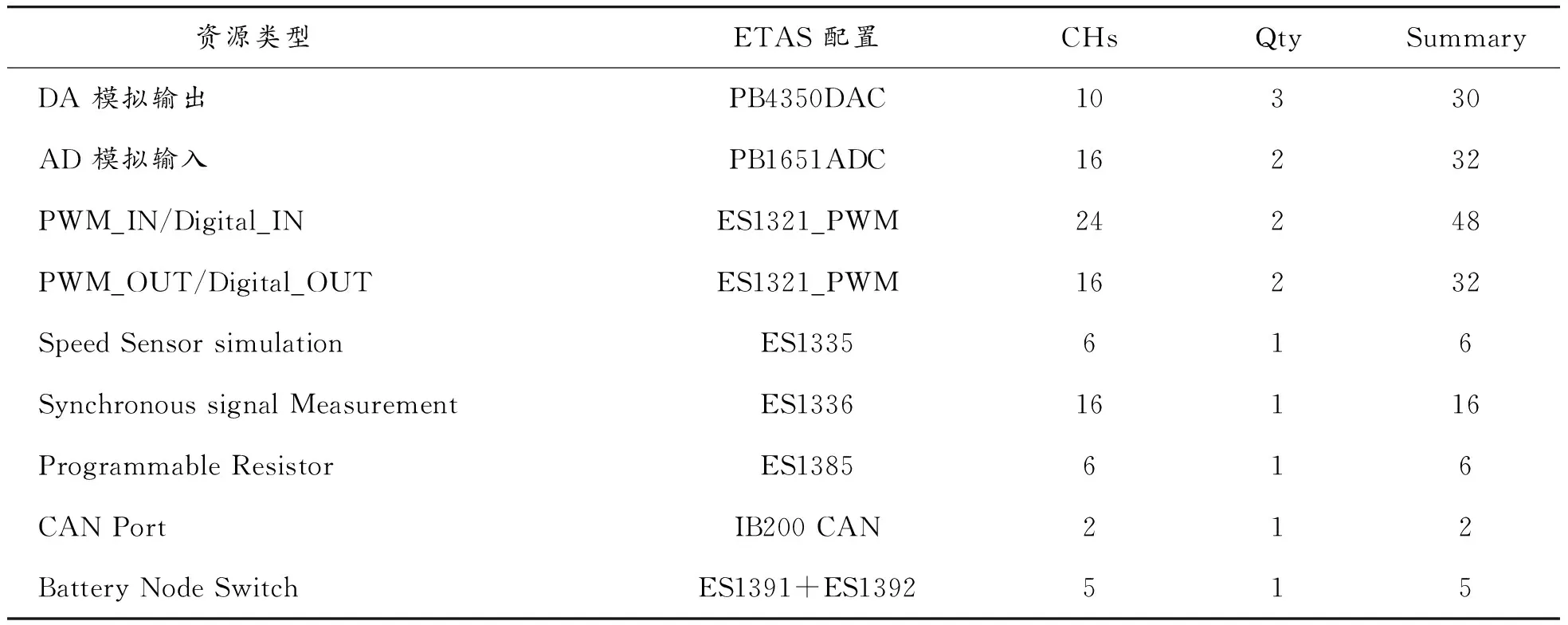
表2 系统板卡配置
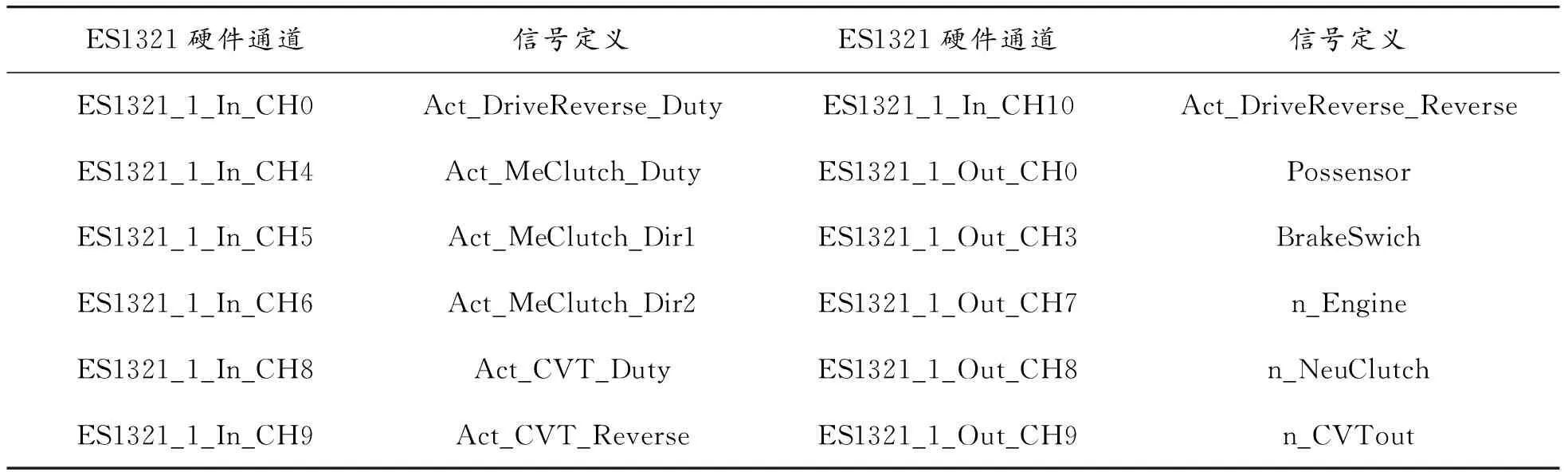
表3 ES1321信号连接关系
ES1321-In-HW-Globals用于数字信号高低电平配置。在配置过程中:Threshold主要定义数字/PWM信号高低电平转化的门槛值; Threshold设置支持手动设置电压值。Threshold设置需根据实际ECU信号决定,可通过示波器显示的信号作为判断依据。
ES1321-In-Meas-Signals用于数字信号测量对象的选择,在配置过程中,Measurement Procedure为测量对象选择,如果是数字信号,则应选择Level(Active High)或者Level(Active Low);如果是PWM信号,则应选择Duty Cycle L或Duty Cycle H。
ES1321-Out-DigPWM-Signals 用于数字/PWM输出信号配置,在配置过程中:Output Usage为输出信号选择;Hardware Update为PWM信号输出更新方式选择; Cycle End对PWM信号的更改只在当前PWM信号当前周期完成后发生。
3) PB4350DAC 模拟信号输出板卡
在配置过程中,PB4350DAC-Signals Data用于硬件通道基本配置。DAC通道如选择Internal Reference,有信号发生时Data中实时显示的数值为电压值;DAC通道如选择External Reference,则通道的参考电压为ECU提供的外接参考,信号发生时Data中实时显示的数值为相对于参考电压的百分数。
3 实时仿真模型
在HIL测试中,仿真模型的精度直接决定了测试结果的有效性.如果模型过于简单,则无法反映车辆动力学的真实特性;模型过于复杂则会影响其计算速度,仿真结果也较难收敛。
基于人-车-路的仿真模型如图5所示,包括驾驶员模型、环境模型以及车辆模型。其中:驾驶员模型(driver)用于模拟加速、刹车、换挡、停车等操作;环境模型(environment)用于模拟车辆行驶时的温度、压力、坡度等因素;车辆模型(vehicle)由发动机、传动系统、车辆动力学、辅助机构四大子模型组成[4]。本项目在已有模型的基础上,根据 EMCVT HIL测试系统要求,对该模型进行适当剪裁,基于Matlab/Simulink在传动系统模型中增加EMCVT模型,建立EMCVT控制器硬件在环测试所需的仿真模型。

图5 基于人-车-路的仿真模型
4 系统集成调试及工况测试
系统集成调试是在系统搭建完成的基础上对系统进行开环调试和闭环调试,验证传感器、执行器、接口模块功能,以及控制器基本功能和基本控制策略。
4.1系统调试方法
开环激励验证传感器和执行器功能。在模型中设置物理值,用标定软件监控ECU读取值进行比对。ECU设置占空比和数字量,在LCO EE中读取进行比对。
在Simulink环境中手动给定电机占空比和方向,根据需要的角位移变化是否合理来判断电机和驱动模块的参数是否合理,比对各种参数进行初步参数化。
编写电机接口模块,分析ECU控制接口和模型电机接口以确定电机方向与角位移的关系。
通过ECU激励开环调试电机响应,手动给定各电机的工作条件,观察电机响应和角位移的运动是否合理。
闭环调试怠速稳定和离合器磨合过程,观察速比变化时的跟随性。
4.2系统调试结果
开环激励验证传感器和执行器功能。以离合器锥盘位置为例,它是通过锥盘位置角位移传感器进行测量的,在本次测试中,通过比较模型输出值、板卡输出值、TCU测量值这3个数据来验证TCU测量信号的偏差。表4给出了离合器锥盘位置信号的测试结果,从表中可以看出:TCU测量值的偏差很小,在允许范围(0.07 V)之内;TCU能准确地识别读取传感器信号值,对传感器信号的采集正常。

表4 离合器锥盘位置信号测试结果
在调试过程中,出现电机方向和角位移判断不对的情况。通过开环激励的方式修正后解决问题。发动机出怠速后,调速时输出扭矩超限导致模型卡死,只有在每个模块中限制扭矩输出,不考虑惯性扭矩。简化离合器磨合计算,将扭矩线性化提升进出怠速鲁棒性。
4.3系统工况测试
EMCVT硬件在环测试系统主要对离合器以及调速机构的功能进行验证。系统通过循环工况测试,采集所需信号输出结果,分析离合器的结合情况,主要包括是否出现起步结合抖动等问题。分析调速机构的调速情况,如加减速时速比跟随性是否满足要求、车速跟随是否良好等,从而完成控制单元的功能验证。
本项目使用ECE2循环工况,通过LABCAR操作软件导入到测试系统中,将驾驶员操作模式从手动切换到自动模式,选定所需测试循环工况。系统将根据循环工况所设定的速度作为目标车速输入,再通过模型计算以及EMCVT控制单元的调速功能完成循环工况的模拟试验。
图6为调试之后进行工况试验的测试效果。采集了发动机转速、目标车速、实际车速、CVT速比等数据。从测试结果来看,发动机出怠速时转速不稳,鲁棒性较差,通过简化离合器磨合计算和扭矩线性化可以改善这一问题。实际车速与目标车速跟随性良好,速比调节满足实际要求。该硬件在环测试系统满足EMCVT控制单元基本功能的测试要求。
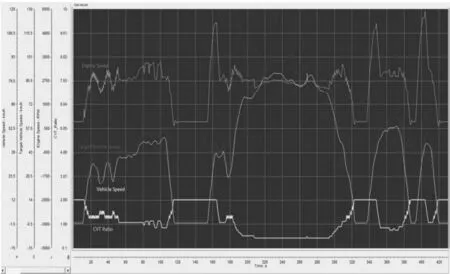
图6 测试效果
5 结束语
为了满足对机电控制无级变速器控制单元测试要求、验证其硬件与控制算法功能的有效性和可靠性,搭建了机电控制无级变速器控制单元硬件在环测试系统。
利用机电控制无级变速器控制单元硬件在环仿真系统进行了仿真测试,结果表明:所搭建的硬件在环测试系统能满足控制单元软硬件的实时验证及优化控制要求,为变速器电子控制单元的开发提供了很好的仿真测试平台。
下一步可结合LABCAR的故障注入功能,完善TCU的故障诊断测试,为其产品化奠定基础。
[1]杨新桦.金属带式无级变速器控制系统和控制策略研究[D].武汉:华中科技大学,2010.
[2]杨学平.基于LabCar硬件在环测试系统的研究[D].昆明:昆明理工大学,2014.
[3]邵华,钱人一,郭晓潞,等.LabCar的功能与构成[J].世界汽车,2002(11):22-24.
[4]李国宁.EMCVT硬件在环仿真系统初步开发与研究[D].沈阳:东北大学,2010.
[5]蒋强.机械电子式无级变速传动系统动态特性及控制策略研究[D].沈阳:东北大学,2013.
[6]叶明,李鑫,谢佳佳.搭载机电控制CVT的驱动工况调速策略[J].重庆理工大学学报(自然科学),2013(7):14-18.
[7]彭江,马翔,夏超,等.搭载机电控制CVT的电子换挡系统设计[J].重庆理工大学学报(自然科学),2015(11):28-36.
[8]付畅,过学迅,胡朝峰.金属带式CVT电控单元硬件在环仿真研究[J].汽车工程,2008(3):255-259.
[9]郝允志.无级变速器控制系统与硬件在环仿真研究[D].重庆:重庆大学,2011.
(责任编辑刘舸)
Hardware in the Loop Test System of Transmission Control Unit for Electronic-Mechanical Continuously Variable Transmission
XIA Chaoa, LI Xinb, CHENG Yueb
(a.College of Vehicle Engineering; b.Key Laboratory of Advanced Manufacturing Technology for Automobile Parts, Ministry of Education, Chongqing University of Technology, Chongqing 400054, China)
This article focused on the building method and the system debugging method based on LABCAR hardware in the loop test system. As the test object of electronic-mechanical continuously variable transmission control unit, the hardware in the loop test system based on LABCAR test platform will be built according to requirements analysis of TCU. This system meets the demands of TCU’s basic functions test, control strategy test and fault diagnosis test. Meanwhile, it posses the characteristics of real-time, openness and extensiveness.Key words:hardware in the loop; electronic-mechanical continuously variable transmission; TCU; LACBCAR
2016-07-13
国家自然科学基金资助项目(51275549)
夏超(1991—),男,重庆人,硕士研究生,主要从事车辆传动系统及其控制研究,E-mail:523869820@qq.com。
format:XIA Chao, LI Xin, CHENG Yue.Hardware in the Loop Test System of Transmission Control Unit for Electronic-Mechanical Continuously Variable Transmission[J].Journal of Chongqing University of Technology(Natural Science),2016(9):18-25.
10.3969/j.issn.1674-8425(z).2016.09.003
U463
A
1674-8425(2016)09-0018-08
引用格式:夏超,李鑫,程越.机电控制无级变速器控制单元硬件在环测试系统[J].重庆理工大学学报(自然科学),2016(9):18-25.
猜你喜欢
汽车电器(2022年5期)2022-05-23
汽车维修与保养(2020年11期)2020-06-09
测控技术(2018年3期)2018-11-25
测控技术(2018年12期)2018-11-25
火控雷达技术(2016年3期)2016-02-06
汽车实用技术(2015年8期)2015-12-26
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年6期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
汽车维修与保养(2014年12期)2014-04-18