基于H桥逆变器的永磁容错电机电流滞环跟踪与电压空间矢量的脉宽调制比较研究*
2016-10-26 05:46白洪芬朱景伟孙军浩周博文
电机与控制应用 2016年8期
白洪芬, 朱景伟, 孙军浩, 周博文
(大连海事大学 轮机工程学院,辽宁 大连 116026)
基于H桥逆变器的永磁容错电机电流滞环跟踪与电压空间矢量的脉宽调制比较研究*
白洪芬,朱景伟,孙军浩,周博文
(大连海事大学 轮机工程学院,辽宁 大连116026)
永磁容错电机的各相绕组采用H桥逆变器供电,消除了各绕组间的中性点,实现了电气隔离,提高了电机控制系统的直流电压利用率和容错性能。在分析永磁容错电机H桥逆变电路结构和工作原理的基础上,阐述了电压空间矢量脉宽调制(SVPWM)和电流滞环跟踪脉宽调制(CHBPWM)的原理,设计了三相永磁容错电机的矢量控制系统,并建立了三相永磁容错电机SVPWM和CHBPWM的仿真模型,搭建了基于DSP的三相永磁容错电机矢量控制系统试验平台。通过仿真和试验,对比分析了两种控制策略的优缺点和适用范围。
H桥逆变器; 永磁容错电机; 矢量控制; 电流滞环跟踪脉宽调制; 电压空间矢量脉宽调制
0 引 言
永磁容错电机(Fault-Tolerant Permanent Magnet Motor, FTPMM)因具有良好的容错性和可靠性[1-3],逐渐应用于船舶运输、航天航空、医疗等对安全性要求较高的场合。传统的电机驱动系统常采用相绕组星型接法,用全桥拓扑结构的逆变器驱动电路。在电机发生故障时,故障相的电流可以通过中性点耦合到其他正常相,从而使整个系统都发生故障。因此,为了消除电机相与相之间的电气耦合,FTPMM的各相绕组考虑采用单独的H桥进行供电。文献[4]通过理论和仿真对比分析了H桥和星型驱动电路在拓扑结构和短路容错策略方面的区别,并进行了试验验证。文献[5]采用H桥控制器实现对永磁同步电机控制,并通过仿真验证了该控制方法的可行性。
电流滞环跟踪脉宽调制(Current Hysteresis Band Pulse Width Modulation, CHBPWM)和电压空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)是两种常用的PWM控制策略,在基于全桥逆变电路的永磁同步电机控制中已得到了成熟应用。近些年,越来越多的文献开始研究H桥和级联型H桥,并通过仿真和试验验证了H桥型SVPWM控制算法的优点[6-10]。文献[11-12]通过仿真和试验验证了基于CHBPWM控制的H桥级联型逆变器调制方法的可行性。虽然对基于H桥逆变电路的CHBPWM和SVPWM两种控制方法的研究较多,但很少有文献分析两种控制策略的优缺点及适用范围。
因此,为了更好地研究H桥逆变器在FTPMM控制中的应用,本文在分析三相FTPMM和H桥逆变电路基本结构的基础上,根据FTPMM矢量控制系统的基本原理,搭建仿真模型和试验平台,通过对仿真和试验结果的分析,归纳对比了SVPWM和CHBPWM控制技术的优缺点和适用范围。
1 FTPMM结构及H桥逆变电路
三相FTPMM结构如图1所示。从图1可看出: 三相FTPMM的每个槽内只有一相绕组,绕组间由电枢齿隔开,实现了物理隔离、热隔离、磁隔离;采用H桥逆变电路供电,实现了各绕组间电气隔离。通过开槽深度和绕组匝数设计提高电抗,减小了短路电流,具有故障容错能力[13]。

图1 三相四极FTPMM结构图
三相FTPMM的H桥逆变电路如图2所示。图2中Udc表示直流母线电压,每个H桥逆变电路由4个IGBT和4个续流二极管组成,电机的一相绕组跨接在两个桥臂的中点。H桥逆变电路比普通的三相全桥逆变电路的电压基波幅值要大,直流电源的利用率更高。电机各个绕组间无中性点,实现了电气隔离,也提高了直流电压利用率,增加了器件的可靠性,提供了丰富的电压空间矢量,为提高电机的容错控制能力提供了条件[14]。

图2 三相FTPMM H桥逆变电路
2 FTPMM的矢量控制系统
2.1FTPMM矢量控制系统结构
FTPMM的矢量控制系统由FTPMM、H桥逆变器、转子位置与转速传感器和电流控制环节等多个部分组成。电机转速通常采用PI控制,定子电流可以采用CHBPWM控制或SVPWM控制。两种矢量控制系统结构框图如图3所示。
2.2CHBPWM
CHBPWM技术是以正弦波电流为控制目标的一种控制方式,其基本思想是根据给定的三相定子电流信号与检测到的相应定子电流信号的大小关系,确定H桥逆变电路中各开关的状态,保证在实际电流大于给定值时,通过逆变器使之减小,反之增大[15]。最终,实际电流波形围绕给定的正弦电流在一定范围内作锯齿状变化。CHBPWM控制原理图如图4所示。


图3 矢量控制系统结构框图

图4 FTPMM A相CHBPWM控制
图5为正弦参考电流滞环控制下相电流的产生过程。在频率足够高时,开关管的开关频率[16]为
(1)
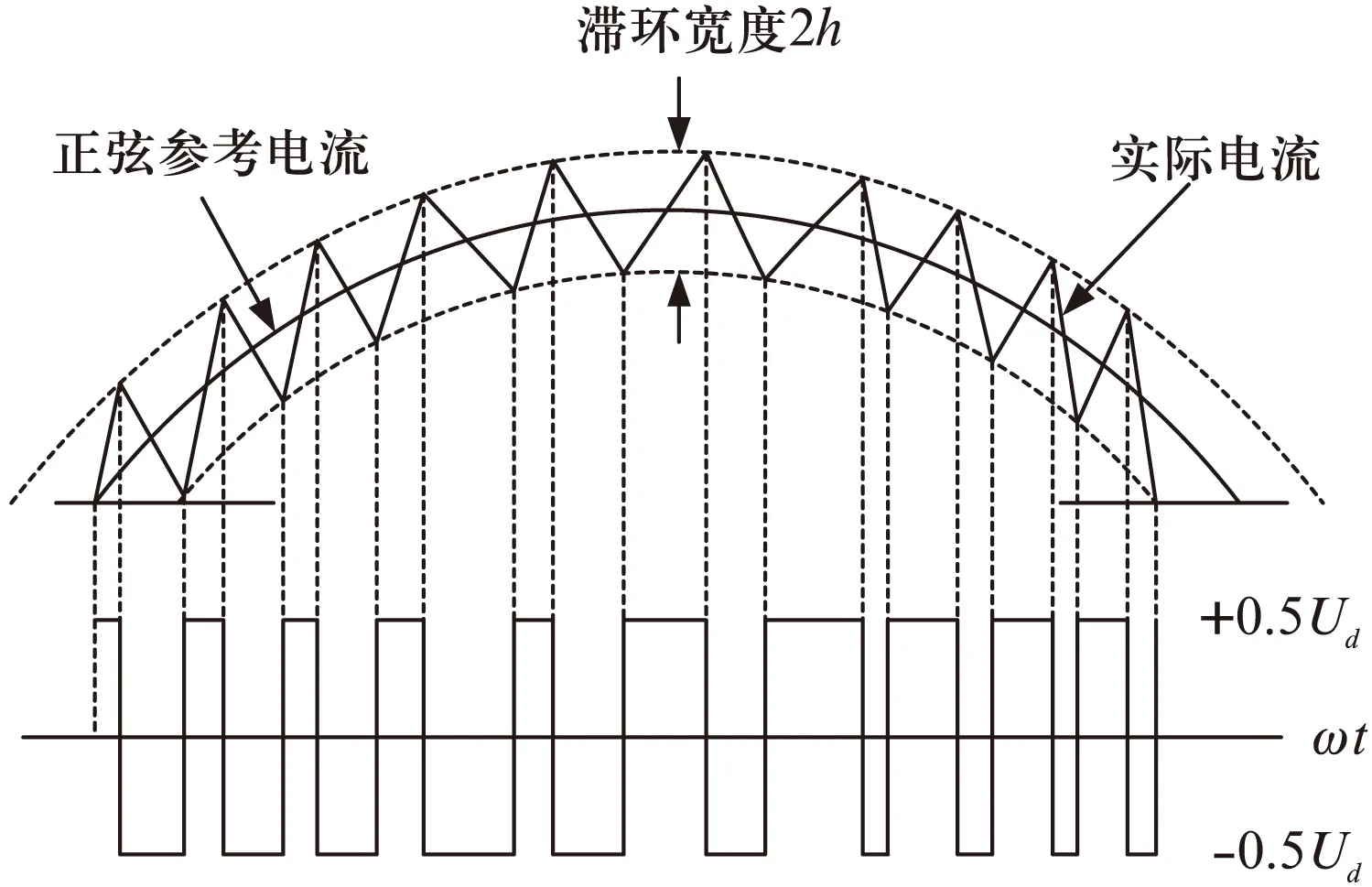
图5 FTPMM A相电流滞环控制电流波形
由式(1)可以看出,滞环比较器的环宽2h直接影响电流的跟踪性能:h过大时,开关频率低,跟踪误差大;h过小时,跟踪误差小,但开关频率过高,开关损耗增大。


图6 滞环比较器开关图
采用移相三电平方式对驱动器的相电流进行跟踪控制,使输出电压在Udc、0、-Udc之间切换[17]。根据开关图可以得出逆变器的开关过程。
2.3SVPWM控制
SVPWM控制算法是根据逆变器不同工作模式下所产生的实际磁链矢量来追踪基准磁链圆的。根据追踪结果确定变频器的开关模式,由逆变器功率器件的开关触发顺序和脉宽大小形成的组合,产生互差120°电角度且失真较小的三相正弦电压[18]。
H桥逆变电路为180°导通型功率开关管,上下桥臂不能同时导通。三相H桥型逆变器共有23=8个电压矢量,即6个非零有效电压空间矢量U1~U6和2个零矢量U0、U7,0和1对应开关状态,“1”表示上桥臂开关管导通,“0”表示下桥臂开关管导通。由Ui(SaSbSc)表示的逆变器的开关状态,如图7所示。
如图8所示,SVPWM控制是在一个控制周期T内,选择与参考电压矢量最接近的两个开关矢量,通过控制每个开关矢量的工作时间,使各开关矢量在平均伏秒意义上与参考电压矢量的控制效果等效,如式(2)所示:

图8 电压空间矢量的线性组合
(2)
式中:T1、T2——所选的相邻两电压矢量的作用时间;
T0——零矢量的作用时间。
确定电压矢量切换点时,考虑到零矢量,根据开关切换次数最少的原则,开关次序可分配为(0,0,0)T→U1→U2→(1,1,1)T→U2→U1→(0,0,0)T,其中,U1、U2分别表示开关状态中有1和2个上桥臂开关管导通的工作电压矢量。
2.4CHBPWM控制与SVPWM控制的关系
2.4.1两种控制方式的谐波分析
三相FTPMM输出的周期为T=2π/ω的非正弦电压UA(ωt)满足Dirichlet收敛条件,可分解为如下形式的傅里叶级数[19]:
(3)
其中:
由Dirichlet收敛定理可知,其傅里叶级数收敛。由SVPWM控制的工作原理展开为
(4)
式中:UAn(ωt)是对UA(ωt)的逼近。
由式(4)可看出,SVPWM控制的电压主要由基波和3次谐波构成。由于H桥逆变电路各相绕组相互独立,不能像普通同步电机那样通过星型连接滤除3次谐波,所以该逆变电路输出的电压和电流会受到3次谐波的影响。
由于CHBPWM控制无需载波,所以输出电压中不含特定频率的谐波分量。
2.4.2两种控制方式的联系
在正弦稳态下,三相FTPMM电压与电流的矢量关系为
(5)
式中:us——电压矢量;
Rs——定子电阻;
is——定子电流矢量;
Ls——定子电感;
Ψf——永磁体在电动机绕组产生的等效磁链,Ψf=Ψfejθr,且Ψf为恒值。
则式(5)可近似表示为
(6)
由式(6)可知,在一定速度下,定子电流矢量is偏差的方向与电压矢量us的方向和关系是可以判断的。CHBPWM控制由Δis区域检测判断开关顺序,SVPWM由us判断开关顺序,所以两种控制方式在一定情况下可以达到同样的效果。
3 两种控制策略的仿真研究
为了验证基于H桥逆变器的矢量控制策略的正确性,在MATLAB/Simulink R2012a中搭建三相FTPMM矢量控制系统仿真模型,对基于CHBPWM和SVPWM的两种方法的控制性能进行比较。两种方法均采用id=0的控制策略。表1为仿真时所需的电机参数,仿真时间设置为0.3s。
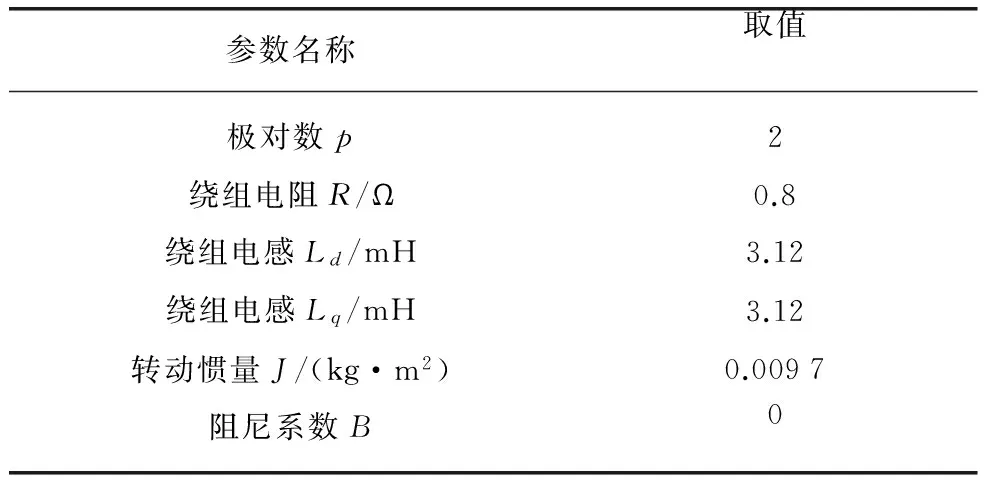
表1 仿真所需的电机参数
为便于比较,两者速度环均采用PI控制且取相同的PI系数,仿真时间均设置为0.3s。起动时给定转速n=1000r/min,转矩T=2.3N·m,在t=0.1s突加转速到n=2000r/min,在t=0.2s时突加负载到额定转矩T=3.75N·m,所得转速和转矩的仿真波形如图9所示。

图9 转速、负载突变时波形变化图
由图9可看出,CHBPWM控制的响应速度比SVPWM控制稍快;但是在负载和速度突变时,由于CHBPWM控制的开关频率不固定,所以其转矩脉动和速度脉动比SVPWM要大得多。
在0.21~0.3s时间内,两种控制方式均为稳定运行。对该时间段内的电压进行谐波分析,如图10所示。
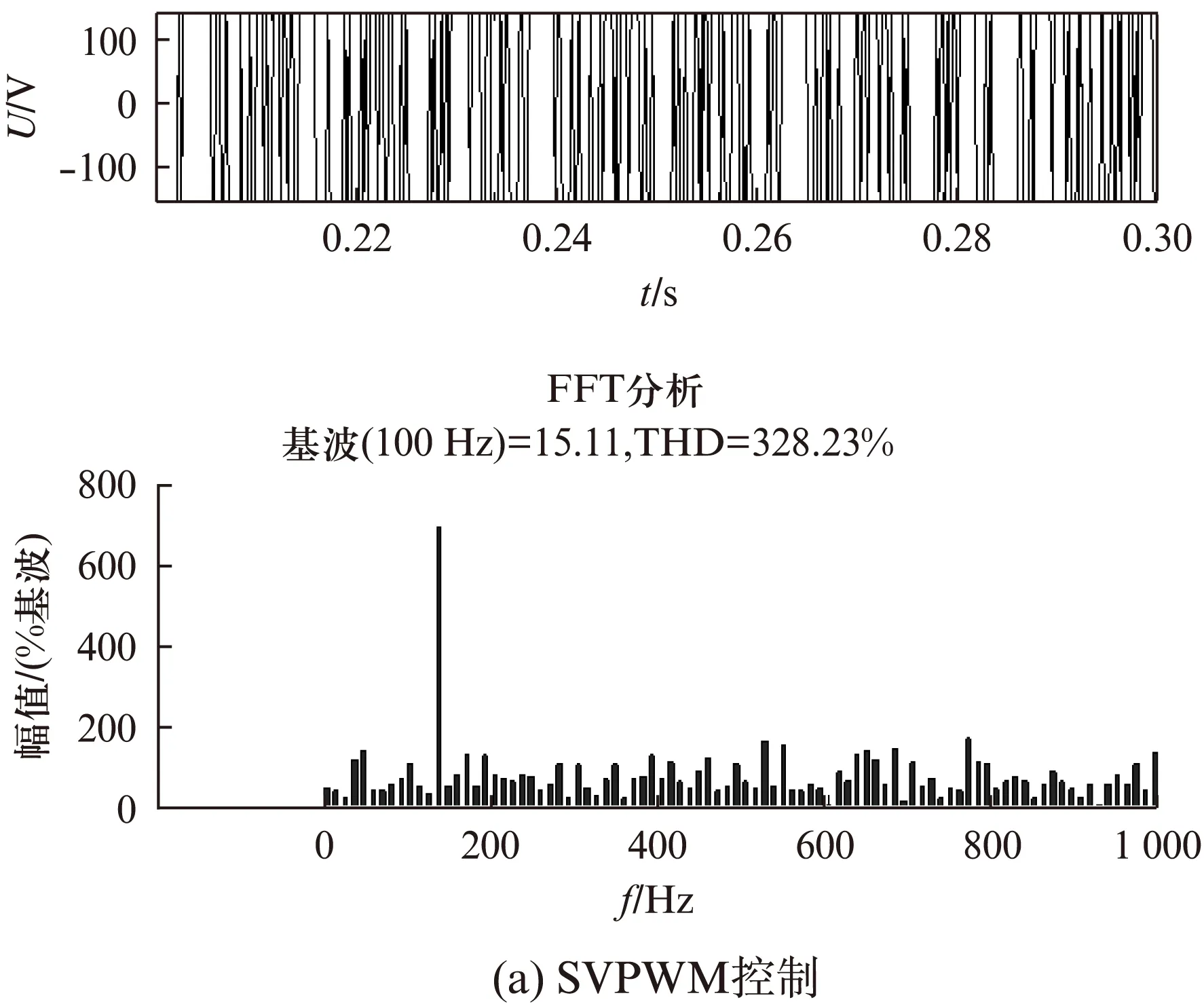

图10 电压谐波分析
由图10可知,在参数相同的情况下,SVPWM在基波频率附近的THD值较大,而CHBPWM没有特定频率的谐波含量。
仿真结果表明: 基于SVPWM控制策略的转矩和转速脉动小、谐波含量少;而CHBPWM控制方法相对简单,响应速度较快,当功率器件的开关频率足够高时不依赖于电机参数,鲁棒性好。因此,在对响应速度要求较高的场合应该优先考虑采用CHBPWM控制,而对于转矩和转速精度要求较高的场合则需要考虑采用SVPWM控制。
4 试验验证及分析
为了进一步分析基于H桥逆变电路的FTPMM的性能,对基于CHBPWM和SVPWM的两种控制方式进行闭环试验研究。试验用三相四极FTPMM控制系统如图11所示。其中功率器件选用FGA25N120ANTD IGBT,控制器采用TMS320F28335 DSP芯片。FTPMM同轴安装一台永磁同步发电机作为负载,其三相输出经整流后连接可调变阻器,通过调节变阻器改变系统负载的大小。其中,试验电机的参数与表1中的仿真参数相同。
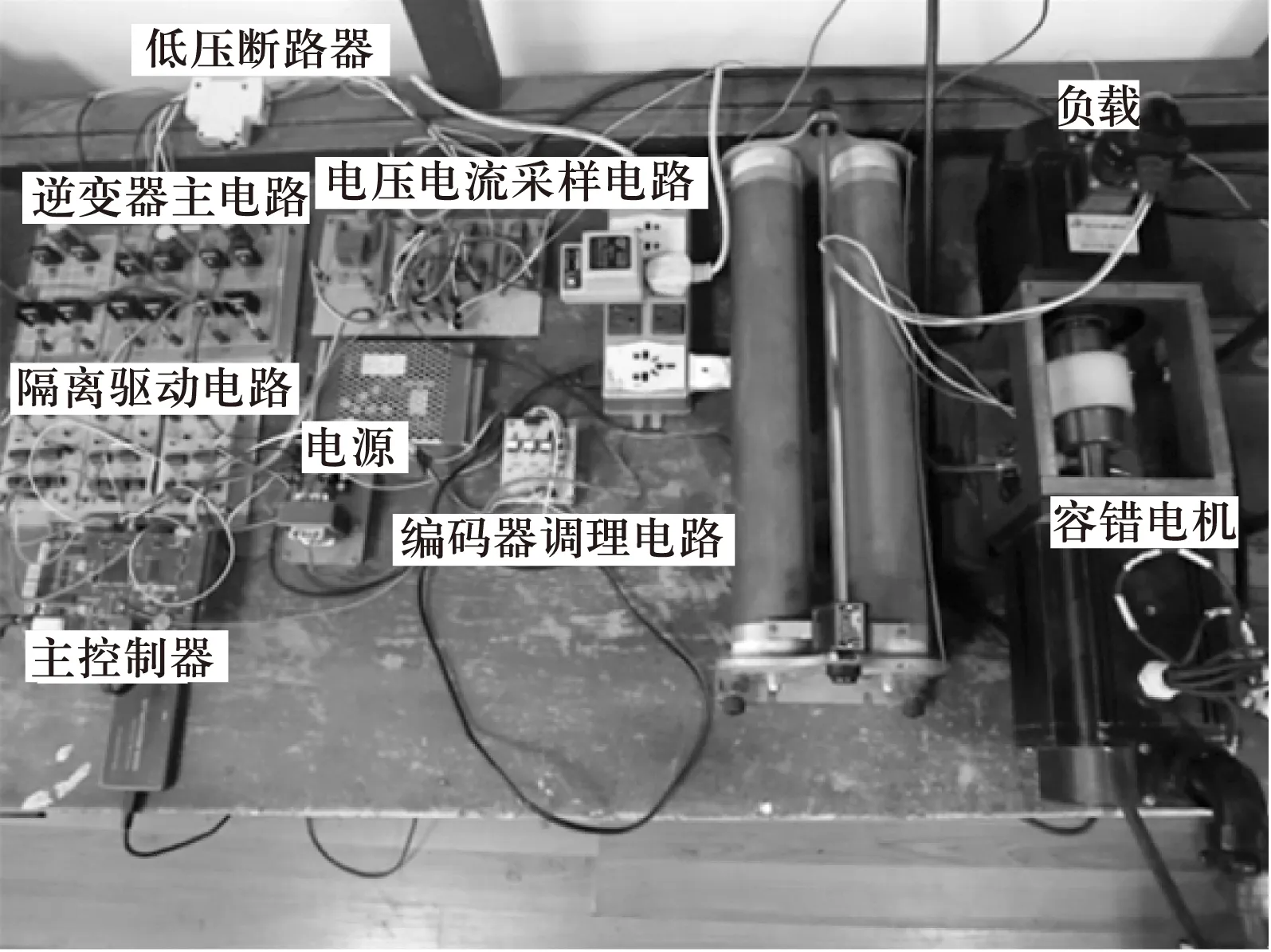
图11 FTPMM控制系统试验平台
试验时,给定转速为1000r/min。两种控制策略下电机输出到示波器中的三相电流波形如图12所示。

图12 电流波形图
由图12可知,两种控制策略下三相电流波形均为近似正弦波,验证了H桥逆变电路驱动的两种控制方式的正确性。其中,基于SVPWM控制的输出电流由于3次谐波的影响而使波形与标准正弦有一定偏差,与理论分析一致。
同样工作条件下,测得两种控制方式的转速波形如图13所示。

图13 转速波形图
由图13可知,两种控制策略下转速均可以正确跟踪给定转速。SVPWM控制的转速脉动约为1.1%,CHBPWM控制的转速脉动约为2.5%,与仿真结果相同。
同样工作条件下,测得两种控制方式的转矩波形如图14所示。

图14 转矩波形图
由图14的试验波形可知,两种控制策略均可输出给定的转矩。SVPWM控制的转矩脉动(约为6.2%)比CHBPWM控制的转矩脉动(约为7.3%)稍小。
5 结 语
基于H桥的逆变电路与传统的三相全桥逆变电路相比,其实现了绕组间的电气隔离,在结构上保证了系统的容错控制能力。本文分析了SVPWM和CHBPWM两种矢量控制方式的基本原理,通过仿真和试验验证了两种控制策略的可行性。相对于CHBPWM控制,SVPWM控制对直流侧电压的利用率更高,可以减少开关和谐波损耗,从而降低转矩脉动,而CHBPWM控制则可优先用于对转速、转矩响应速度要求较高的场合。对于两种PWM控制策略的研究,对以后基于H桥逆变电路的FTPMM的故障检测与分析具有重要的意义。
[1]MECROW B C, JACK A. Design and testing of a four-phase fault-tolerant permanent-magnet machine for an engine fuel pump [J]. IEEE Transaction on Energy Conversion, 2004,19(2): 132-137.
[2]陈贤阳,黄开胜,陈贤波.五相永磁容错电机设计与故障控制[J].电机与控制应用,2014,41(8): 22-27.
[3]王霞,朱景伟,曹林柏,等.基于Ansoft的双绕组永磁容错电机设计[J].电机与控制应用,2015,42(9): 34-38.
[4]司宾强,朱纪洪,吉敬华.四相永磁容错电机短路故障容错策略[J].控制与决策,2014,29(8): 1489-1494.
[5]康尔良,霍亮,吕德刚.永磁同步电动机定转子磁场正交控制研究[J].微电机,2015,48(4): 43- 46.
[6]卢峥,阎德键,朱思国.级联型H桥多电平逆变器SVPWM控制研究[J].电力电子技术,2012,46(10): 90-92.
[7]李卫超,马伟明,汪光森,等.中点钳位型H桥级联单相逆变器新型空间矢量脉宽调制方法[J].中国电机工程学报,2014,34(30): 5313-5319.
[8]朱玉琼,朱方田,方蒽,等.一种H桥级联型多电平逆变器SVPWM通用算法实现[J].电气传动,2013,43(5): 28-32.
[9]李明勇,朱鹏,蔡巍.基于空间矢量脉宽调制的5相H桥型逆变器谐波控制[J].高电压技术,2012,38(11): 3080-3086.
[10]蔡巍,乔鸣忠,张晓锋.H桥型五相感应电机SVPWM控制技术[J].电力系统及其自动化学报,2008,20(4): 33-38.
[11]朱思国,欧阳红林,刘鼎,等.基于电流滞环控制的H桥级联型逆变器新型调制方法[J].电工技术学报,2013,28(2): 212-218.
[12]张加胜,李浩光.基于滞环控制的电压型变流器开关频率分析[J].电力系统及其自动化学报,2008,20(2): 57-59.
[13]孙军浩,朱景伟,白洪芬,等.基于滑模观测器的永磁容错电机转子位置估计算法研究[J].电机与控制应用,2016,43(6): 1-6.
[14]朱景伟,刁亮,任宝珠.具有冗余特性的永磁容错电机短路故障分析与控制[J].电工技术学报,2013,28(3): 80-86.
[15]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京: 机械工业出版社,2014.
[16]洪峰,单任仲,王慧贞,等.一种变环宽准恒频电流滞环控制方法[J].电工技术学报,2009,24(1): 115-119.
[17]梁锦涛,赵升吨,赵永强,等.多相永磁电机各相独立式驱动控制系统的设计与研究[J].机床与液压,2014,42(15): 57-62.
[18]阮毅,陈伯时.电力拖动自动控制系统——运动控制系统[M].北京: 机械工业出版社,2011.
[19]GUO H, XU J, KUANG X. A novel fault tolerant permanent magnet synchronous motor with improved optimal torque control for aerospace application [J].Chinese Journal of Aeronautics, 2015,28(2): 535-544.
Comparative Study of Current Hysteresis Band and Space Vector Pulse Width Modulation Control for Fault-Tolerant Permanent Magnet Motor Based on H-Bridge Inverter*
BAIHongfen,ZHUJingwei,SUNJunhao,ZHOUBowen
(College of Marine Engineering, Dalian Maritime University, Dalian 116026, China)
The H-bridge inverters are adapted to supply power for the fault-tolerant permanent magnet motor(FTPMM). on the base of analyzing the circuit structure and principle of H-bridge inverter,the basic principle of space vector pulse width modulation (SVPWM) and current hysteresis band pulse width modulation (CHBPWM) for three-phase fault-tolerant permanent magnet motor (FTPMM) was introduced and the FTPMM vector control system was designed. Then the simulations were built in MATLAB/Simulink and the experimental platform of three-phase FTPMM control system based on digital signal processor (DSP) was built and the experiments were carried out on it. The advantages and disadvantages and application fields of two control strategies were compared from the simulation and experiment results.
H-Bridge inverter; fault-tolerant permanent magnet motor (FTPMM); vector control; current hysteresis band pulse width modulation(CHBPWM); space vector pulse width modulation(SVPWM)
国家自然科学基金项目(51077007);辽宁省科学技术计划(2011224004);中央高校基本科研业务费专项资金项目(3132016313)
白洪芬(1988—),女,博士研究生,研究方向为永磁容错电机的控制。
朱景伟(1963—),男,教授,博士生导师,研究方向为永磁电机及控制、新能源变换技术等。
TM 351
A
1673-6540(2016)08- 0014- 07
2016-01-28
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23