
小型涡喷发动机故障分析及控制系统改进
2016-10-25 10:04陶德桂王成军
航空发动机 2016年4期
陶德桂,王成军
(中国人民解放军92419部队,辽宁兴城125106)
小型涡喷发动机故障分析及控制系统改进
陶德桂,王成军
(中国人民解放军92419部队,辽宁兴城125106)
针对小型高速无人机配装的小型涡喷发动机发生的空中停车故障,以发动机转速异常为顶层事件,以导致顶层事件发生的全部可能性为基本事件建立故障树,结合发动机控制原理及对遥测数据进行仔细分析,确认发动机转速采集信道出现问题导致发动机控制系统进入边界控制,而边界条件设置不合理导致发动机工作在超速超温状态,最终失效。通过采取增加转速采集备份信道、改进ECU控制保护算法、修改ECU档位油门限幅等措施有效地排除了此类故障,提高了发动机工作的可靠性。
小型涡喷发动机;小型高速无人机;转速传感器;发动机控制单元;故障树;冗余度
0 引言
国产某新型小型高速无人机配装单发小型涡喷发动机[1],使用清洁度为GJB420A的5级或以上国产RP-3航空煤油为燃料,其最大推力可达1.37kN,起飞质量最大可达300 kg,飞行速度最大可达220 m/s,飞行高度范围为50~7000 m,具有遥控、2维程控、3维程控和自动飞行等多种模态,研制完成至今已累计飞行近百架次,覆盖整个设计高度,发动机一直工作正常。但首次在海平面上飞行时发生了停车故障,导致无人机坠海。
本文针对故障现象及遥测数据进行分析,依据发动机控制原理建立故障树[2-3],最终确认该型发动机在控制系统方面存在安全隐患,需对其进行改进和完善。
1 故障现象描述
2014年下半年,在某临海发射试验场进行了新型高速无人机首次海上飞行试验,试验以失败告终。在事后排故中,结合试验现场故障现象及事后遥测数据分析,准确复现了无人机的整个飞行过程:无人机正常起飞后,按任务要求以5档档位进行爬升,1 min32 s后当靶机爬升至高度为1465 m、速度为120 m/s时,发动机转速在1 s内由46200 r/min迅速降为0 r/min,持续1 s后,又在51~9190 r/min转速范围内变化了2 s,而后降为0 r/min,直至坠海;在发动机转速变化过程中,发动机油门由60.6%逐步升为93.3%;发动机排气温度在20 s内由正常值610℃均匀升至815℃,之后迅速窜升,直至超过温度传感器量程(1000℃);在此过程中,靶机飞行高度和速度均继续增加,直至发动机排气温度[4-5]超过1000℃时,靶机速度和发动机滑油压力同时降低。3 min17 s后无人机姿态失稳,自动执行保护开伞,5 min14 s后机上遥测信号消失,无人机落水。无人机故障前后发动机参数及空速变化曲线分别如图1、2所示。
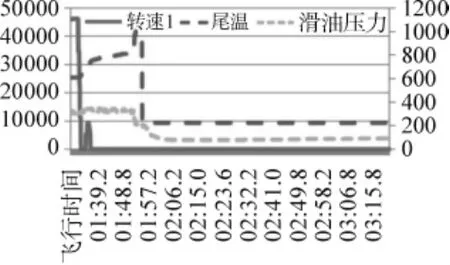
图1 发动机转速、尾温及滑油压力变化相对曲线
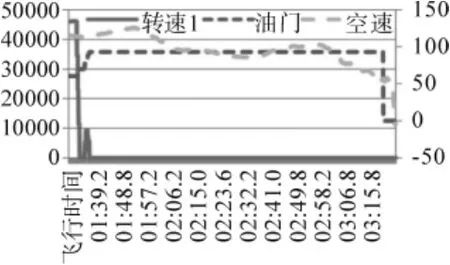
图2 发动机转速、油门及空速变化相对曲线
2 发动机控制系统工作原理
该小型涡喷发动机控制系统[6]由发动机控制单元(ECU)、供油系统、转速传感器及相关线缆组成,工作原理如图3所示。
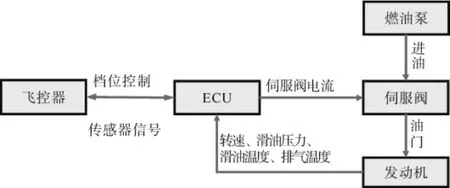
图3 发动机控制系统工作原理
从图中可见,通过ECU接收飞控器档位控制指令,并采集发动机当前转速值判断发动机当前转速是否处于预定范围,若采集的转速值低于或高于预定转速范围,由ECU通过增加或减小油门的方式控制供油系统对发动机的供油量,使发动机转速达到预定转速范围,最终通过闭环控制实现发动机转速相对稳定。同时,通过ECU采集发动机工作的滑油温度、滑油压力、排气温度和油泵电流等参数,作为监测量传给飞控器。
根据发动机工作特性和速度要求,发动机共设有多个工作档位,其中1~4档可根据实际需要灵活使用;5档为经济转速档,耗油率最低,飞行速度可达160~180 m/s,巡航时使用此档位;6档一般在任务段高速飞行和爬升时使用,平飞速度可达200~220 m/s;还可根据需要增设其他档位。发动机工作档位与转速、油门限定范围对应关系见表1。
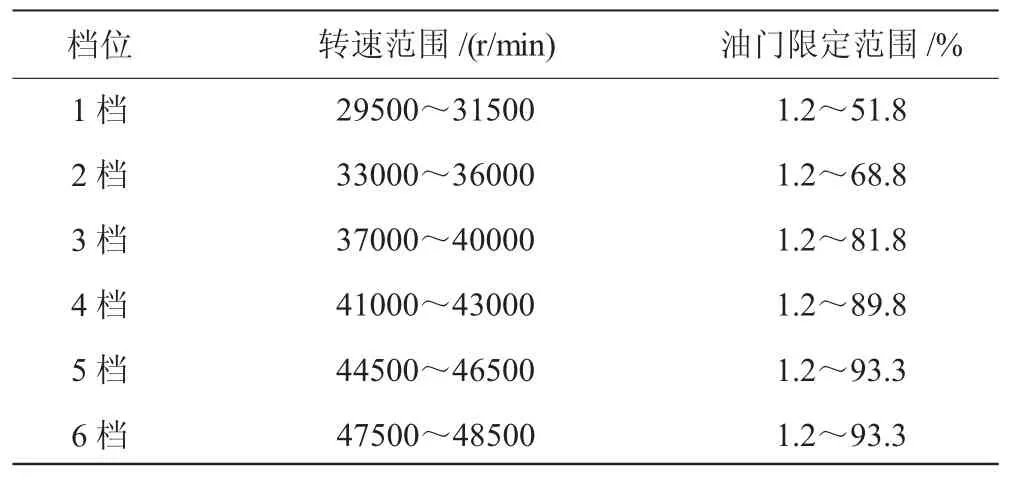
表1 发动机工作档位与转速、油门限定范围对应关系
该无人机的发动机采用型号为350GRP105磁电式转速传感器测量转速[7-8],转速传感器固定在发动机壳体上,与压气机转子叶片外缘相距1 mm±0.5 mm,通过3芯线缆与外部接插件(+5V电源和地线及输出信号线)相连,当发动机工作时,由ECU提供给转速传感器+5V电源。压气机转子共有13片叶片,转子的每片叶片通过传感器每次输出1个方波脉冲信号,该信号通过线缆传送到ECU内部经滤波/隔离处理后,由CPU进行计数和均值滤波运算,每100 ms采集1次转速值,取连续10次转速均值作为发动机的当前转速值。发动机工作转速范围为0~51000 r/min,转速传感器的响应频率为0~15 kHz,最大可测量转速值为15000/13×60=69230 r/min,满足发动机转速测量要求。发动机转速信号流程如图4所示。
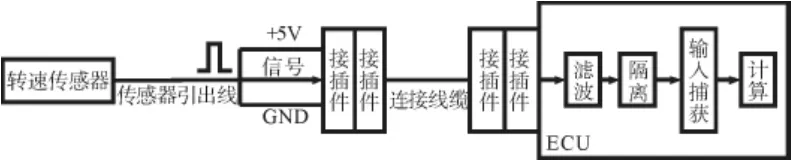
图4 发动机转速信号流程
3 故障定位
分析图1、2的曲线可知,当发动机转速突变为0 r/min后,无人机的空速并未下降,而是继续增加,这说明发动机并未真正停车;相反,在此过程中按照发动机转速预定控制策略,ECU在侦测到转速低于5档转速范围(44500~46500 r/min)后,自动调整发动机油门至限定范围最高值93.3%,发动机推力增大,相应地无人机的空速增加,发动机的排气温度升高,这说明此时发动机的转速测量通道出现问题。按照该架无人机以前的飞行记录推算,当其在93.3%的油门工作时,发动机转速可达51516 r/min,已超出发动机最大转速(51000 r/min),在此转速下,发动机工作16 s后,超温到最高容许温度(860℃)以上,最终导致发动机无法正常工作而停车。发动机停车后,滑油压力及无人机空速降低,与实际情况相符。
由此可见,导致发动机在超速超温状态下工作最终停车的直接原因是发动机转速信号测量通道出现问题,这与发动机在控制策略上未采取比较安全的保护性措施也有关系。
为了进一步确定发动机转速信号测量通道故障位置,对发动机转速测量、传递及采集等过程进行分析,以发动机转速异常为顶层事件,分析顶层事件发生的全部可能性基本事件,建立故障树[9-10],如图5所示。对故障树提供的基本事件逐一分析。
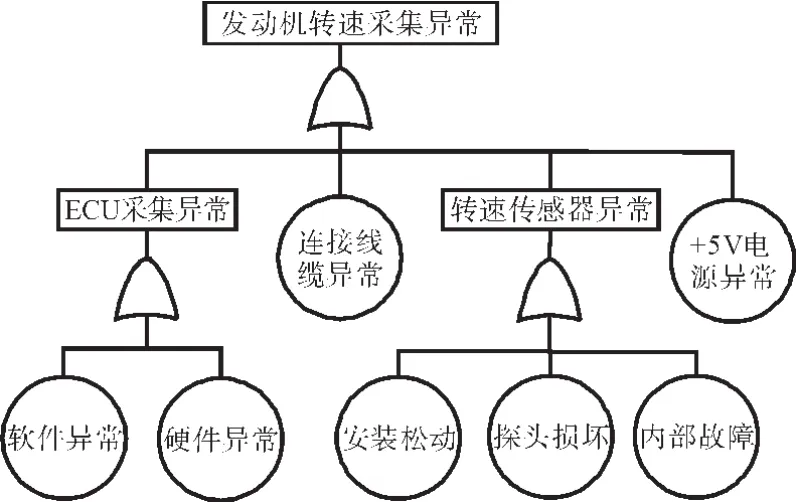
图5 发动机转速采集异常故障树
3.1软件异常
如果ECU软件出现诸如死机、跑飞等问题,可能会引发转速采集异常[11]。
Sulfonating and sulfating technologies and equipment 10 52
由故障发生前后发动机参数的变化可知,在发动机转速突变为0 r/min的过程中,ECU调整了发动机油门至93.3%,符合发动机转速预定控制策略,且发动机的其它参数诸如滑油温度、滑油压力、排气温度、油泵电流等数据采集连续可信,证明ECU软件工作正常[12]。
3.2硬件异常
ECU硬件电路芯片及元器件已按照项目元器件筛选大纲进行了2次筛选。在装机前按照环境应力筛选和环境适应性要求进行了环境试验,并在装机后通过了整机试车检验和拷机检验。如果ECU硬件电路(比如信号隔离器件)发生故障或者失效,一般具有不可恢复性,与故障后转速短时出现失真数值的现象不符(根据尾温及油门等数据分析,此时发动机转速约为47500 r/min,判断记录数值失真,没有反映真实转速,由信号不稳定导致)。因此,可以排除ECU硬件异常的可能性。
3.3连接线缆异常
线缆断路、接头虚焊及接插件松动等异常,会导致转速信号中断或者不稳定,与故障后转速短时出现失真数值的现象相符,在后续的故障复现试验中也通过试验复现了该现象。因此,存在连接线缆异常的可能性。
3.4转速传感器安装松动
转速传感器通过M8×1的螺纹安装在发动机安装板上,采用双面螺母锁紧,并涂螺纹胶防松;安装板通过3个M4螺钉固定在发动机机体上,并采用防松耳片进行机械防松。类似的设计在机械行业广泛应用,比较可靠,故可以排除传感器安装松动情况。转速传感器的安装结构如图6所示。
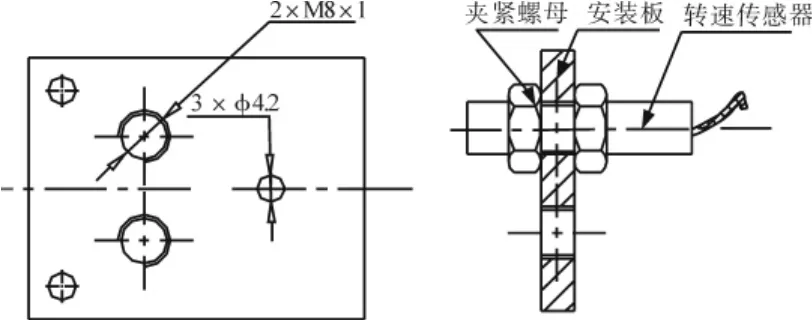
图6 转速传感器安装
3.5转速传感器探头损坏
转速传感器安装位置不合理,会出现传感器探头与发动机叶片发生碰擦的情况,可能会造成传感器损坏,导致故障发生。按照传感器技术指标规定,传感器检测距离应<2 mm,传感器安装位置与发动机叶片外径的距离为1 mm±0.5 mm。发动机经过出厂试车检验及外场飞行,进场后在技术准备过程中发动机系统未拆卸过,且试车调试和发射前开车均正常,可以排除安装不到位造成碰擦的情况。
发生碰擦或因其它原因造成的损坏具有不可恢复性,与故障后转速短时出现失真数值的现象不符。因此,可以排除传感器探头损坏的可能性。
3.6转速传感器内部故障
该型转速传感器大量应用在其它型号的无人机上,产品质量稳定可靠,且在装机前经过了严格的测试和验证,理论上不应出现故障,但不能绝对排除个体异常现象。
在后来对另外2架无人机的转速传感器及备件进行检查时,发现其中备用转速传感器无法正常工作,发动机吹气运转时转速输出为0 r/min,更换转速传感器后工作正常。经检查,发现传感器外观无碰擦现象、线缆完好、插头焊接无虚焊,初步判断为传感器内部故障。
由于坠海的无人机未打捞上岸,无法对当事传感器进行有效的测试分析,故不能排除转速传感器内部发生故障情况。
3.7+5V电源异常故障
转速传感器必须在+5 V电源下才能正常工作,该电源由ECU提供,与CPU共用同一电源,通过前述分析,ECU软件运行正常,可推断CPU的电源供应也正常,排除+5 V电源异常的可能性。
3.8故障定位
综上所述,导致发动机转速异常的原因可能是连接线缆异常及转速传感器内部故障。
4 改进措施
针对故障现象暴露出的问题,经充分讨论,决定除加强对安装部件的检测外,另外采取如下4项措施:
(1)增加1路独立的发动机转速采集信道。本发动机在设计之初就预留有安装2只转速传感器的位置(图6),在实际使用中也确实安装了2只转速传感器,只是在本型号无人机中另一只转速传感器闲置未加以利用,可利用这只转速传感器组成双备份转速采集信道。由于2只转速传感器的安装位置已经确定,其与压气机[13-14]转子轴线的夹角不是转子相邻叶片夹角的整数倍,所以其输出信号存在相位差,不能简单地进行互补叠加,必须增加1路独立的转速采集信道由CPU引脚对转速信号进行捕获计数(图4),提高硬件的冗余度[15]。相应地,在发动机控制软件中需要对这2路互为备份的转速信号进行采集、运算、比对和判断,提高转速信号采集的准确性和可靠度。当2路信道采集到的转速值在允许的误差范围内时,可认为该转速采样值准确可信;如果相差较大,则应结合尾温值判断哪个转速值更可信,从而利用该值进行发动机转速控制。
(2)采取控制保护措施,增加ECU控制保护判断条件。该型发动机工作时靠ECU控制,启动后的怠速转速为26500~28600 r/min,之后通过串口接收飞控指令来控制发动机的转速。飞控指令通过1~6档来控制发动机运行在事先设定好的不同转速下以得到不同的推力(表1)。如果发动机正常运行时其采样到的发动机转速低于怠速转速或者高于最高档位转速,则可认为转速采集通道出现异常,考虑到留有一定的余量,故设置判断条件为当转速<20000 r/min或转速>51000 r/min时,认为转速采集通道出现异常,此时ECU关闭闭环程序控制逻辑,禁止采样值与预设值的比较,保持当前油门值不变,这样可以有效防止转速失效之后油门值飙升导致发动机“超限”运行。
针对第2项改进措施,验证试验情况如下:用信号发生器模拟转速传感器输出,当模拟转速升高到35000 r/min时,发送3档指令,油门开始缓慢上升,在油门上升过程中,断开信号发生器的输出,之后转速降低到20000r/m以下时,油门立即停止上升,最终停止在34%,其试验记录结果如图7所示。
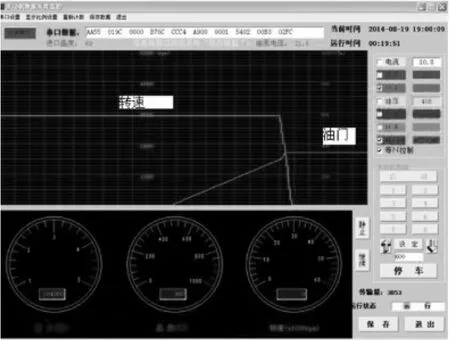
图7 修改程序后试验情况
(3)增加超温超转保护措施。该型发动机的正常工作温度≤820℃,在冲速度时≤860℃。当ECU采集到的温度>900℃时,如果转速>48500 r/min,可认为此时发动机处于超温超转的不正常工作状态,可采取切断油路降转降温的措施。该型发动机的ECU通过控制MOS管IRFZ48N的工作区来控制油泵供电回路的通断,通过PWM波的形式控制伺服阀电流调节发动机转速。具体措施即通过CPU的GPIO口控制MOS管截止断开油泵供电回路。
(4)修改ECU档位油门限幅。从表1中可见,原先设定的档位所对应的油门限定范围较宽,导致档位所对应的转速范围也较宽,为了使档位油门限幅更趋于合理、精确,使ECU在进行转速闭环程序逻辑控制时转速变化范围限定在1个相对较小的区间,对另外几架无人机的发动机进行了开车标定试验,获取每台发动机档位转速与油门对应关系,根据试验值对档位油门限幅进行优化处理,使其更加合理。修改后的档位油门限幅值见表2。
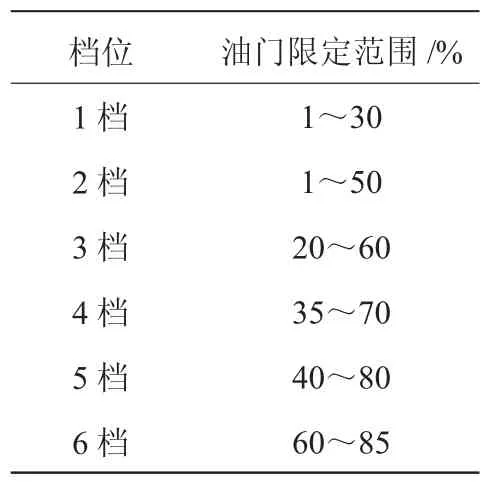
表2 调整后发动机工作档位与油门限定范围对应关系
5 结束语
按照上述4项改进措施,对ECU程序进行了修改并进行了内部测试和验证后,将程序固化到ECU中,模拟外场试验数据分别进行试验,证明了改进措施正确有效。
修改后的程序可以有效防止转速失效后油门值飙升导致发动机“超限”运行的故障发生。将修改程序后的ECU安装到无人机上,反复进行静态拷机测试及飞发联调试车,并模拟可能出现的各种情况,发动机工作正常。
在此后的多架无人机飞行试验中,未再发生此类发动机空中停车的故障,验证了改进措施的针对性和有效性,大大增加了发动机的容错保护能力,有效避免了同类故障再次发生。
[1]祝小平.无人机设计手册[M].北京:国防工业出版社,2007:219-234. ZHU Xiaoping.Unmanned aircraft systems design manual[M].Beijing:National Defense Industry Press,2007:219-234.(in Chinese)
[2]董海鹏,高延滨,毛奔.基于故障树与案例相结合的故障诊断方法[J].应用科技,2010,37(11):60-64. DONG Haipeng,GAO Yanbin,MAO Ben.A fault diagnosis method combining fault tree and case analysis[J].Applied Science and Technology,2010,37(11):60-64.(in Chinese)
[3]邱楚楚,盖强,马野.基于故障树的无人机发动机点火系统维修性建模[J].应用科技,2011,38(8):5-8. QIU Chuchu,GAI Qiang,MA Ye.Maintainability modeling of UAV engine ignition by fault tree[J].Applied Science and Technology,2011,38(8):5-8.(in Chinese)
[4]杨志民,孙永飞,赵煜,等.航空发动机燃烧室出口温度场双向测量方法[J].航空发动机,2010,36(1):42-44. YANG Zhimin,SUN Yongfei,ZHAO Yu,et al.Bi-directional measurement method of combustor outlet temperature field for aeroengine[J]. Aeroengine,2010,36(1):42-44.(in Chinese)
[5]苏金友,袁世辉,赵涌,等.某改型温度测量探针结构气动特性试验与数值分析[J].航空发动机,2015,41(1):80-84. SU Jinyou,YUAN Shihui,ZHAO Yong,et al.Experiment and numerical simulation of aerodynamic performance of improved temperature probe[J].Aeroengine,2015,41(1):80-84.(in Chinese)
[6]周乃君,李艳丽,杨南,等.发动机通用电控单元(UECU)的研发与试验[J].内燃机,2010,148(5):35-38. ZHOU Naijun,LI Yanli,YANG Nan,et al.Development and study on universal electronic control unit for engines[J].Internal Combustion Engines,2010,148(5):35-38.(in Chinese)
[7]黄宛宁,张来宇,王保成.Rotax发动机转速传感器设计研究[J].电子测量技术,2012,35(4):105-109. HUANG Wangning,ZHANG Laiyu,WANG Baocheng.Research of rev sensor of Rotax aviation engine[J].Electronic Measurement Technology,2012,35(4):105-109.(in Chinese)
[8]贾淑芝,李军.某型航空发动机转速信号故障分析[J].航空发动机,2008,34(2):46-47. JIA Shuzhi,LI Jun.Failure analysis of speed signals for an aeroengine[J]Aeroengine,2008,34(2):46-47.(in Chinese)
[9]阳再清,欧阳中辉,吕晓林.某小型涡喷发动机空中停车故障分析[J].兵工自动化,2013,32(10):88-90. YANG Zaiqing,OUYANG Zhonghui,LYU Xiaolin.Failure analysis of a small turbo-jet engine power off during flight[J].Ordnance Industry Automation,2013,32(10):88-90.(in Chinese)
[10]肖强.某型航空发动机空中降转故障分析[J].航空发动机,2011,37(6):26-27. XIAO Qiang.Analysis of in flight speed drop failure aeroengine[J]. Aeroengine,2011,37(6):26-27.(in Chinese)
[11]王旭峰.小型航空发动机数字电子控制器设计技术研究[D].西安:西北工业大学,2007. WNAG Xufeng.Research of digital electronic controller design technology for small aero engine[D].Xi'an:Northwestern Polytechnical University,2007.
[12]杨欣毅,史佩,刘海峰,等.新型小涡轮喷气发动机数控系统仿真实验台[J].实验技术与管理,2009,26(1):56-58. YANG Xinyi,SHI Pei,LIU Haifeng,et al.A new digital control system simulation test bed for small turbojet engine[J].Experimental Technology and Management,2009,26(1):56-58.(in Chinese)
[13]杨帆,赵普扬,葛长闯.无螺栓高压压气机转子结构分析[J].航空发动机,2012,38(3):42-45. YANG Fan,ZHAO Puyang,GE Changchuang.Structure analysis of no bolted high pressure compressor rotor[J].Aeroengine,2012,38(3):42-45.(in Chinese)
[14]李孝堂,崔英俊.基于设计体系的高性能多级压气机综合设计技术[J].航空发动机,2013,39(4):5-8. LI Xiaotang,CUI Yingjun.Integrated design technique of high performance multistage compressors based on design system[J].Aeroengine,2013,39(4):5-8.(in Chinese)
[15]姜彩虹.航空发动机双余度控制规律设计方法[J].航空动力学报,2011,26(10):2364-2370. JIANG Caihong.Method of dual-redundant control law design for aeroengine[J].Journal of Aerospace Power,2011,26(10):2364-2370.(in Chinese)
(编辑:赵明菁)
Failure Analysis and Control System Improvement of Small Turbojet Engine
TAO De-gui,WANG Cheng-jun
(Unit 92419 of PLA,Xingcheng Liaoning 125106,China)
For small turbojet engine shutdown failure in flight of small high-speed unmanned air vehicle,a fault tree was established based on the abnormal engine speed as the top event,taking all the possibilities which caused the top event as the basic event.The telemetry data were carefully analyzed with the principle of engine control.Acquisition channel of engine speed caused a trouble,it may lead to engine control system into the boundary control problem.However,unreasonable boundary condition made engine work under the over speed and over temperature state,eventually lead to the failure.Increasing backup channel of engine speed acquisition,improving the ECU control protection algorithm and modifying the ECU limitation of gear throttle can resolve this failure effectively,and can improve the reliability of the engine.
small turbojet engine;small high-speed unmanned air vehicle;rotation speed sensor;engine control unit(ECU);fault tree;redundancy
V 235.11
A
10.13477/j.cnki.aeroengine.2016.04.006
2015-11-06
陶德桂(1969),男,高级工程师,主要从事无人机应用研究工作;E-mail:taodg@sina.com。
引用格式:陶德桂,王成军.小型涡喷发动机故障分析及控制系统改进[J].航空发动机,2016,42(4):25-29.TaoDegui,WangChengjun.Failureanalysisand controlsystemimprovementofsmallturbojetengine[J].Aeroengine2016,42(4):25-29.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
岷峨诗稿(2020年4期)2020-11-18
电子制作(2019年22期)2020-01-14
时代英语·高一(2019年1期)2019-03-13
智富时代(2018年9期)2018-10-19
智富时代(2018年9期)2018-10-19
汽车电器(2018年8期)2018-08-25
电子制作(2018年9期)2018-08-04
汽车之友(2016年10期)2016-05-16
