
根轨迹法在燃油控制回路PI控制器参数设计中的应用
2016-10-25 10:04胡文霏
航空发动机 2016年4期
徐 建,杨 刚,胡文霏
(中航工业航空动力控制系统研究所,江苏无锡214063)
根轨迹法在燃油控制回路PI控制器参数设计中的应用
徐建,杨刚,胡文霏
(中航工业航空动力控制系统研究所,江苏无锡214063)
为进一步提高航空发动机燃油控制回路的控制性能,使其达到数控系统性能指标要求,针对发动机的特性,从其控制系统的实际运用角度出发,开发出适用于其燃油控制回路PI控制器的根轨迹参数设计方法。该方法采用根轨迹图并结合控制性能指标要求确定了闭环主导极点的期望区域,在根轨迹图上放置极点和零点,移动闭环主导极点到期望区域内以确定满足性能指标要求的PI控制器参数。通过仿真试验发现,采用根轨迹法所设计的燃油控制回路PI控制器参数不仅能达到数控系统性能指标要求,所设计PI控制器的控制品质还明显优于零极点对消法。
根轨迹法;零极点对消法;PI控制器;控制系统;航空发动机
0 引言
目前,国内航空发动机数控系统的参数设计一般采用零极点对消法[1-3],该方法将被控对象近似为1阶传递函数,以校正后开环系统的1个积分环节为设计目标,其对于特性接近1阶传递函数的被控对象,所设计参数的控制品质较好。但如果被控对象为2阶甚至3阶传递函数,即特性偏离1阶传递函数特性较远,那么所设计参数的控制品质可能达不到系统性能指标要求。航空发动机大多采用双轴甚至3轴的结构,发动机特性与2阶甚至3阶传递函数特性比较接近。
针对被控对象这种特性,本文将根轨迹法[4-5]用于航空发动机数控系统的参数设计中,该方法所设计参数的控制品质不受被控对象传递函数阶次的影响,且以系统性能指标为设计目标,有助于实现基于指标驱动的航空发动机数控系统的参数设计。
1 根轨迹法原理及其与系统性能关系
根轨迹法是1种图解法,是当系统的某一参数(通常为增益)从零到无穷大变化时,根据开环极点和开环零点的位置信息确定全部闭环极点位置的方法[6]。在应用根轨迹法进行控制参数设计时,实质上是通过采用合适的控制器改变系统的根轨迹形状,使校正后系统所有闭环极点都在虚轴的左侧,且闭环主导极点在期望主导极点区域内,以得到期望的系统闭环性能[7]。
航空发动机数控系统根据发动机的特性,一般采用PI控制器[8]。其中的控制参数Kp、Ti根据系统性能指标确定,使校正后系统所有闭环极点都在虚轴的左侧,且闭环主导极点在期望主导极点区域内,以满足系统性能指标要求。闭环主导极点的时间常数远远大于剩余闭环极点的时间常数,一般在8倍[9]左右。航空发动机数控系统的性能指标为超调量bp和调整时间ts[10]。

由式(1)、(2)可知,超调量与阻尼比[11]成反比,调整时间与复数极点[12]实部绝对值成反比。综合考虑最大允许超调量和调整时间,可以得到闭环主导极点的期望区域,即如图1所示的白色梯形区域。
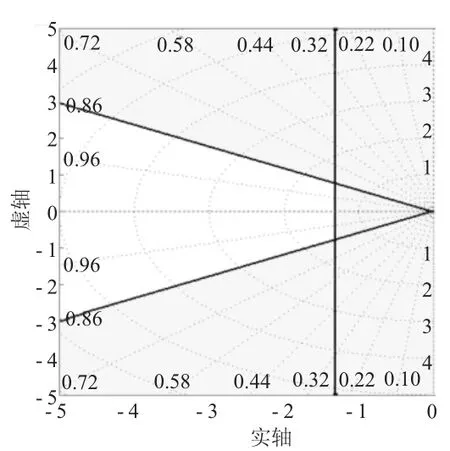
图1 闭环主导极点的期望区域
2 燃油控制回路PI控制器参数设计
采用根轨迹法求取控制器参数包括几何法和解析法2种。几何法通过在根轨迹图上增加极点或零点,并移动闭环主导极点来改变系统根轨迹形状,以得到满足性能指标要求的控制参数;解析法根据根轨迹的幅值条件、相角条件列出方程[13],然后通过求解方程组确定满足性能指标要求的控制参数。
这2种方法本质一样,都是使校正后系统所有闭环极点都在虚轴左侧,且闭环主导极点在期望主导极点区域内,以满足性能指标要求。因此,需着重研究根轨迹参数设计几何法在航空发动机燃油控制回路PI控制器参数设计中的应用。
这种根轨迹参数设计方法通过在根轨迹图上放置极点和零点,并移动闭环主导极点到由系统性能指标决定的期望主导极点区域内,以找到1组合适的PI控制器参数Kp、Ti,使系统满足性能指标要求。该方法是1个迭代的过程,满足系统性能指标要求的PI控制器参数如1次找不到,就需要多次迭代、校核。采用该方法设计PI控制器参数的流程如图2所示。

图2 根轨迹参数设计方法的PI控制器参数设计流程
(1)绘制被控对象的根轨迹图;
(2)根据系统性能指标(调整时间ts,超调量bp)在根轨迹图上绘出闭环系统期望主导极点区域;
(3)增加积分环节,即在原点放1个极点;
(4)在被控对象主导极点位置放1个零点。主导极点即对被控对象动态特性影响最大的极点,一般取离虚轴较近的极点,若被控对象离虚轴较近的极点是1对共轭复数,则在实轴这对共轭复数极点实部的位置放1个零点;
(5)将闭环系统主导极点移至步骤(2)中绘出的期望主导极点区域的边界线附近,保证校正后的闭环系统达到调整时间和超调量的性能指标要求。闭环系统主导极点即对闭环系统动态特性影响最大的极点,一般取离虚轴较近的极点;
(6)检验校正后闭环系统的相位裕度是否大于等于70°[14],若不满足,返回步骤(4)或(5),调整零点,或在期望主导极点区域的边界线附近调整闭环系统主导极点。
3 仿真试验
本文将根轨迹参数设计方法用于航空发动机转速回路主燃油控制的PI控制器控制参数设计中,通过仿真试验验证该方法所设计控制器控制参数的控制品质是否达到性能指标要求,并对比该方法和零极点对消法所设计参数的控制品质。
从不同转速点对发动机非线性模型进行黑箱辨识[15]中,得到该转速点对应的线性模型[16],用于控制参数设计。线性模型应该采用拟合度较高的结构,一般要求不低于95%。对于单轴航空发动机,线性模型结构采用1阶,即,拟合度较高,对于双轴甚至3轴航空发动机,采用2阶,即,拟合度较高。
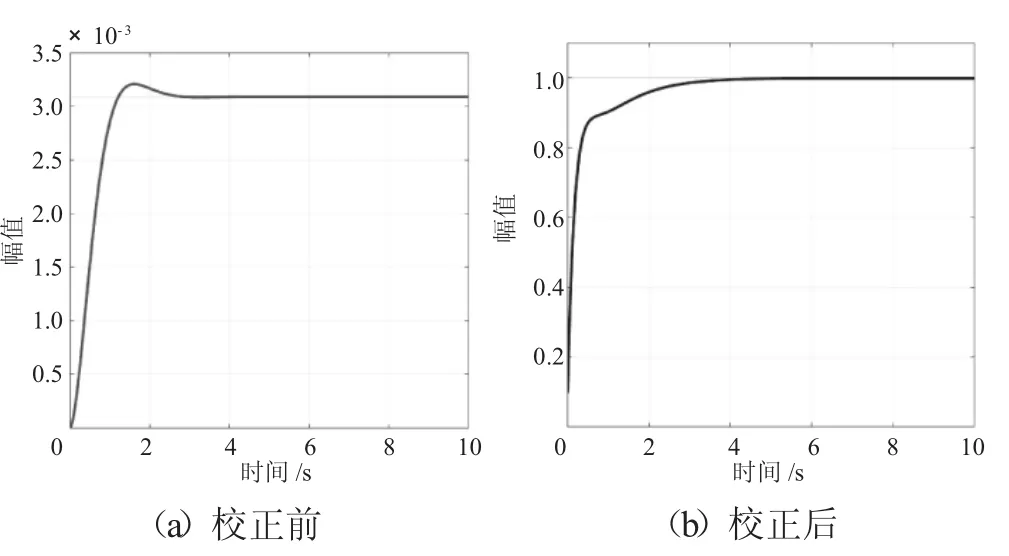
图3 系统校正前后的单位阶跃响应曲线
对根轨迹法和零极点对消法所设计PI控制器控制参数的控制品质进行比较,如图4所示。从图中可知,根轨迹参数设计方法所设计控制参数的控制品质达到系统性能指标要求,且优于零极点对消法。
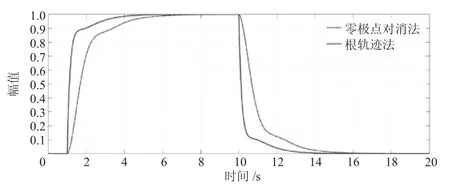
图4 根轨迹法和零极点对消法所设计控制参数的控制品质对比
4 总结
本文对根轨迹法应用于航空发动机燃油控制回路PI控制器参数设计进行了研究,开发出适用于该PI控制器的根轨迹参数设计方法。将该方法用于某双轴航空发动机燃油控制回路PI控制器中进行参数设计,并通过仿真试验对比了采用根轨迹法和零极点对消法所设计PI控制器参数的控制品质。从对比结果发现,根轨迹法所设计参数的控制品质达到数控系统性能指标要求,且优于零极点对消法,此外,该方法以系统性能指标为设计目标,且不受被控对象线性化模型传递函数阶次的约束,可见根轨迹法用于航空发动机燃油控制回路PI控制器参数设计是可行的。
[1]柳亚冰,单贵平.基于Simulink的航空发动机控制律设计与仿真[J].微型电脑应用,2012,28(10):13-14. LIU Yabing,SHAN Guiping.Design and simulation based on Simulink in aero-engine control rules[J].Microcomputer Applications,2012,28(10):13-14.(in Chinese)
[2]乔永凤,王凯.用时域法分析增加零极点对控制系统性能的影响[J].电脑开发与应用,2014,27(10):59-60. QIAO Yongfeng,WANG Kai.Impact on performance of control system to increasing zeros and poles by time domain analysis[J].Computer De-velopment&Applications,2014,27(10):59-60.(in Chinese)
[3]邱伟光.闭环极点与开环零极点的一种关系式[J].湛江海洋大学学报,2002,22(6):55-56. QIU Weiguang.A relation between the close-loop poles and the open-loop zero poles[J].Journal of Guangdong Ocean University,2002,22(6):55-56.(in Chinese)
[4]孙大卫,张国良,陈励华.基于根轨迹的直流伺服电动机PID控制器参数确定法[J].实验技术与管理,2009,26(4):38-39. SUN Dawei,ZHANG Guoliang,CHEN Lihua.Research on the PID parameter of the direct current servo motor based on root locus[J].Experimental Technology and Management,2009,26(4):38-39.(in Chinese)
[5]万萍.Matlab分析连续控制系统的根轨迹[J].硅谷,2014,7(7):189. WAN Ping.Analyzing the root locus of continuous control system by Matlab[J].Silicon Valley,2014,7(7):189.(in Chinese)
[6]王海英,袁丽英,吴勃.控制系统的MATLAB仿真与设计[M].北京:高等教育出版社,2009:153-154. WANG Haiying,YUAN Liying,WU Bo.Matlab simulation and design of control system[M].Beijing:Higher Education Press,2009:153-154.(in Chinese)
[7]赵晴.主导极点在高阶系统分析时的应用[J].石家庄联合技术职业学院学术研究,2007,2(4):18-19. ZHAO Qin.Application of dominant pole for the analysis of high order systems[J].Academic Research of Shijiazhuang Institute of Technology,2007,2(4):18-19.(in Chinese)
[8]王曦,覃道亮.一种基于LMI的航空发动机输出反馈PI控制[J].推进技术,2004,25(6):530-531. WANG Xi,QIN Daoliang.PI output feedback control for aeroengine based on LMI[J].Journal of Propulsion Technology,2004,25(6):530-531.(in Chinese)
[9]Dorf R,Bishop R.Modern control systems[M].UK:Pearson,2008: 36-37.
[10]胡寿松.自动控制原理[M].北京:科学出版社,2007:82-83. HU Shousong.Automatic control principle[M].Beijing:Science Press,2007:82-83.(in Chinese)
[11]马晓玲,熊志坚,李莉.二阶系统的瞬态响应性能指标分析与应用[J].贵州师范大学学报(自然科学版),2003,21(2):23. MA Xiaoling,XIONG Zhijian,LI li.Analysis and application of performance index for transient response of second-order system[J].Journal of Guizhou Normal University(Natural Sciences),2003,21(2):23.(in Chinese)
[12]董宇.根轨迹分析的新方法[J].中国科技论文,2012,7(10):791-794. DONG Yu.A new method on root locus analysis[J].China Science Paper,2012,7(10):791-794.(in Chinese)
[13]唐建国,唐枋.满足相位裕度的PID控制器解析设计方法[J].重庆三峡学院学报,2007,23(3):77-78. TANG Jianguo,TANG Fang.Analytic design method of PID controller satisfying phase margin[J].Journal of Chongqing Three Gorges University,2007,23(3):77-78.(in Chinese)
[14]孔照丹,罗文波,何蕊.基于数据的机械论黑箱辨识方法研究[J].系统仿真学报,2007,19(11):2429-2432. KONG Zhaodan,LUO Wenbo,HE Rui.Research on black-box identification based on DBM method[J].Journal of System Simulation,2007,19(11):2429-2432.(in Chinese)
[15]宋志平,韩崇昭,魏瑞轩.基于发动机非线性响应的辨识线性模型方法[J].推进技术,2005,26(2):155-157. SONG Zhiping,HAN Chongzhao,WEI Ruixuan.Method to identify the multimode linear model of aeroengine based on nonlinear response[J].Journal of Propulsion Technology,2005,26(2):155-157.(in Chinese)
(编辑:栗枢)
Research on Applying Root Locus to Parameter Design of Fuel Control Loop PI Controller
XU Jian,YANG Gang,HU Wen-fei
(AVIC Aviation Motor Control System Institute,Wuxi Jiangsu 214063,China)
In order to improve the control performance of aeroengine fuel control loop,and make it fulfill the performance indices,according to the properties of aeroengine and actual application of aeroengine digital electronic control system,the root locus method applied to PI controller design of aeroengine fuel loop control was developed.Combining root locus diagram with control performance indices,the expected zone of closed loop dominant pole was determined.By putting pole and zero on the root locus diagram,and moving the closed loop dominant pole to the expected zone,the PI controller fulfilling performance indices was got.The result of simulation demonstrates that the control performance of the PI controller designed by the root locus fulfills the performance indices is apparently better than the control quality of the PI controller designed by pole-zero cancellation.
root locus;pole-zero cancellation;PI controller;control system;aeroengine
V 233.7
A
10.13477/j.cnki.aeroengine.2016.04.004
2016-03-01基金项目:国家重大基础研究项目资助
徐建(1986),男,工程师,主要从事航空发动机/燃气轮机建模与控制规律设计工作;E-mail:xujian1986417@163.com。
引用格式:徐建,杨刚,胡文霏.根轨迹法在燃油控制回路PI控制器参数设计中的应用研究[J].航空发动机,2016,42(4):17-20.XUJian,YANGGang,HU Wenfei.ResearchonapplyingrootlocustoparameterdesignoffuelcontrolloopPIcontroller[J].Aeroengine,2016,42(4):17-20.
猜你喜欢
军民两用技术与产品(2022年3期)2022-06-05
物流科技(2022年2期)2022-05-07
中华养生保健(2020年3期)2020-11-16
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
考试周刊(2017年7期)2017-02-06
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
北京航空航天大学学报(2016年7期)2016-11-16
城市建设理论研究(2014年11期)2014-04-21
