
一种新型羽毛球步伐训练器的设计与实现
2016-10-21 06:40王小英徐全
常熟理工学院学报 2016年4期
王小英,徐全
(常熟理工学院电气与自动化工程学院,江苏常熟215500)
一种新型羽毛球步伐训练器的设计与实现
王小英,徐全
(常熟理工学院电气与自动化工程学院,江苏常熟215500)
为了使初中级羽毛球爱好者快速掌握正确的步伐,本文设计了一款操作简单、集语音与红外遥控于一体的新型羽毛球步伐训练器,给出了系统的软、硬件框架,并对训练器进行了多方位的实际测试与分析,验证了其具有较好的稳定性和实用性.
羽毛球步伐;语音识别;红外遥控
羽毛球是奥运会的正式比赛项目,同时也是老少皆宜的一项大众体育项目,同时由于其趣味性强,极具竞争性,深受广大民众的喜爱.但是,目前在市面出售的一些训练器械不仅笨重、携带不方便,而且步法相对固定,不能根据锻炼者的要求调节速度和更换步法,功能较单一.本文设计的羽毛球步伐训练器从现有的科学训练方法出发,基于嵌入式系统以STC系列单片机为主控核心,外围配合语音远程识别系统和红外遥控系统调控训练速度和更换各种步法,使用者只要通过语音和红外遥控即可任意调节步法“加快”或“减速”,更改跑动线路指示节奏,设置稍高于自身运动水平的节奏进行长距离、中距离、短距离跑动训练或直接连贯跑动等训练[1],能迅速提高使用者的启动、反应、衔接以及综合比赛能力,较好地解决了传统羽毛球步伐训练器的缺陷.
1 系统总体设计
步伐训练器采用ABS塑料制作,是按照羽毛球半场仿制的装置,实物及现场使用效果如图1所示.主要用来固定步法指示灯和安放PCB控制板,并给训练者步法指示.步伐训练器指示板的背面有一个可以安装3节AA电池的电池盒,给整个训练器供电.

图1 步伐训练器实物及现场使用效果
主控制器是集成STC51系列单片机模块、LD3320语音识别模块、SYN6288语音合成模块、HX1838红外接收器模块为一体的板块,实现的功能主要有:
1)多种基本步法训练模式:包括直线前后步法、斜线步法、左右接杀步法、左右网前步法、全场米字步法等随机步法.
2)速度和步法调节:共设3个初始速度档位,并可根据训练者需要加速或减速.运用遥控系统和无线语音控制系统进行速度调节,初中高级训练者都能使用.
3)模拟真人发声:当语音识别时,有语音合成发声说出步法和速度的种类,便于控制.并且当指示灯显示位置的同时,有仿真人发声说出准确位置,利于训练.
2 系统硬件设计
系统硬件框架如图2所示,主控系统采用宏晶科技公司生产的增强型高速51系列单片机,内部集成10位高速A/D,最高转换速度可达250 kHZ.语音识别模块采用LD3320芯片,它是一款基于非特定人语音识别和关键词语列表技术的语音识别/声控模块芯片,集成了微处理器MCU和A/D、D/A转换器、MIC接口等一些必要的外部电路,且不需要外接任何的辅助芯片,如Flash、RAM,提供了真正的单芯片语音识别解决方案[2].语音合成模块采用一款端口简单的常用中高端语音合成模块SYN6288芯片,可合成任意的中文文本、英文字母并且语音清晰、自然、准确.同时还具有文本分析处理智能算法,可正确识别时间、日期、数值、号码及常用的度量衡符号.红外接收器使用的是HX1838接收器,不需要外接任何元器件就可以完成红外线接收、输出、TTL电平信号转换,且抗干扰能力强,能抵御环境光线等的干扰.
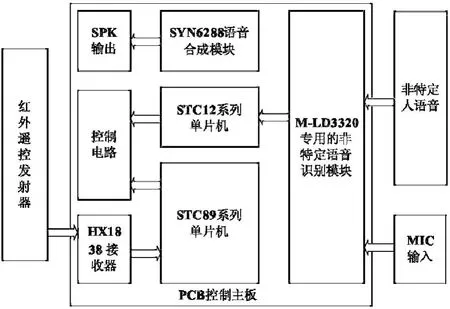
图2 系统硬件框架图
红外遥控系统以STC52单片机为主控核心,红外接收器通过外部中断0与主控通讯.非特定语音识别控制系统以STC12单片机为主控核心,外围语音识别和语音合成通过串行口与主控通讯.考虑到训练器的稳定性、实用性和可操作性,控制板块采用PCB板作为承载模块的主板,根据各个模块的大小、规格、使用的方便性设计端口和布局.
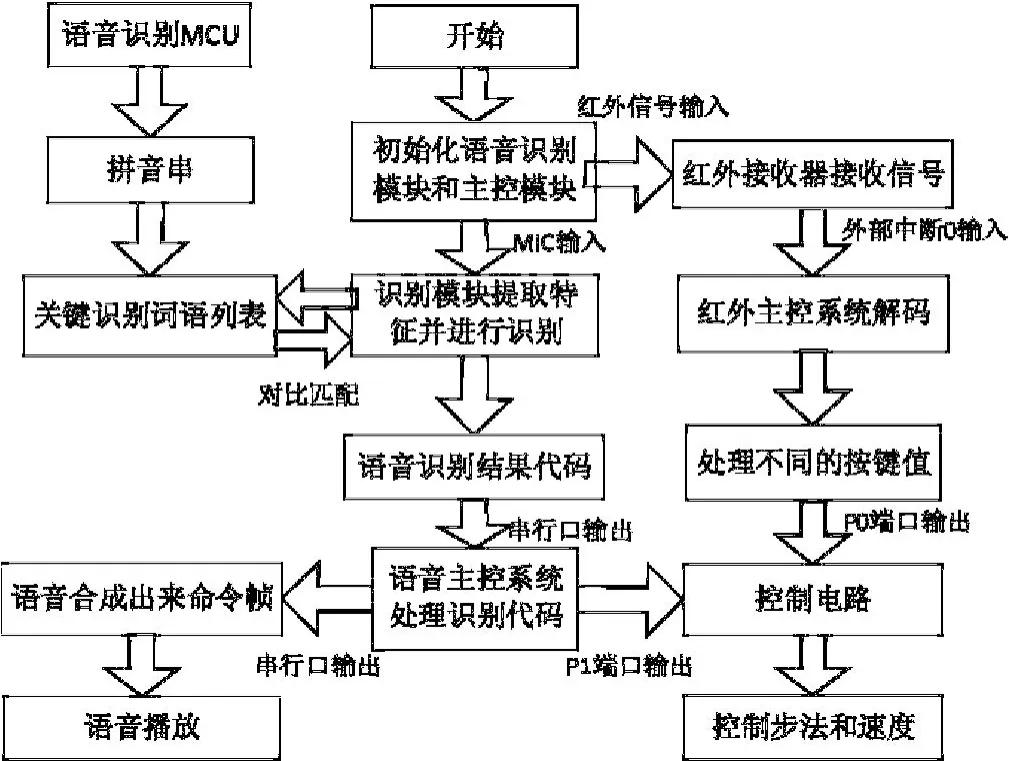
图3 系统软件框图
3 系统软件设计
系统软件主要包括主控系统、红外遥控控制系统和非特定语音识别控制系统3个部分,控制系统的软件主要是围绕语音识别模块开展.主控系统通过串行口RXD端口通讯接收LD3320语音识别模块发送过来的语音代码,将对应的语音合成文本和命令用串行口TXD发送给SYN6288语音合成模块合成播放输出.红外遥控系统通过外部中断0与主控系统通讯,接收模块将信号接收并发送给主控系统进行解码,获得相应指令去控制相关电路.
语音识别采用中断方式工作,其工作流程为:语音识别初始化(通用初始化)---导入关键字识别列表---开始识别---响应中断,如图4所示.
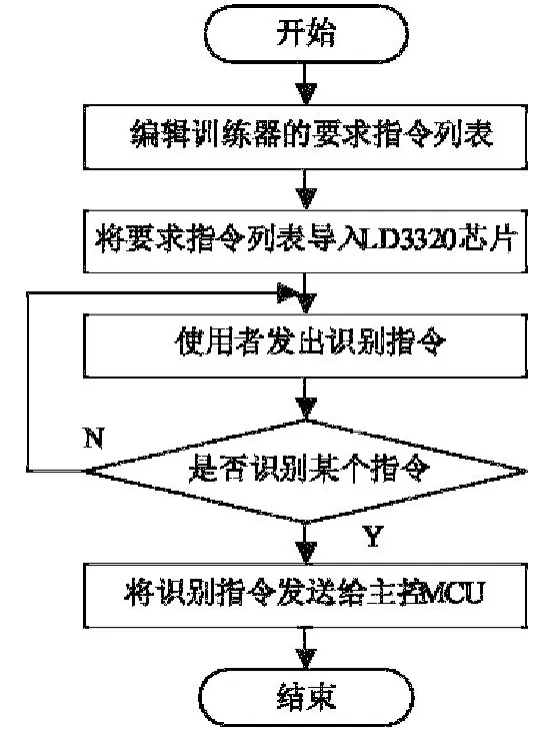
图4 语音识别流程图
(1)导入关键字识别列表.每个关键识别条目对应一个特定的编号(1个字节).编号可以相同,可以不连续,但是数值要小于256(00H~FFH).比如系统中的“训练器”和“控制台”对应同一编号,因此这两个词会有相同的结果返回.本系统芯片最多支持50个识别条目,每个识别条目是标准普通话的汉语拼音(小写),每2个字(汉语拼音)之间用一个空格间隔.本系统采取了连续不同编号的识别条目[3],表1为简单示例.

表1 识别列表
(2)开始识别.在开始语音识别之前,要设置几个有关的寄存器,图4给出了相关流程.其中,ADC通道即为麦克风输入通道,ADC增益即为麦克风音量,可设定值00H~7FH,建议设置值为40H~6FH.值越大代表MIC音量越大,识别启动越敏感,但可能带来较多误识别;值越小代表MIC音量越小,需要近距离说话才能启动识别功能,好处是对远处的干扰语音响应较小.本文中设定值为4FH[4],并且可根据使用环境进行调节.
4 系统测试评估
本文主要针对语音对训练器控制的有效距离和系统误识别概率进行测试.考虑到电路设计可靠性和中间阻挡物以及使用的环境噪音因素,试验进行了多次对比测试和实际运用测试.红外控制的测试与语音识别系统的测试方法基本一致,所以这里以语音识别测试为例.
4.1误识别测试
本文根据不同的咬字清晰度和语速来测试,使用者与训练器之间的距离为1 m,周围环境分为较安静和较嘈杂;语速分为3种慢速、快速和中速;咬字清晰度视使用者个人而定,这里分为两类,一类为清晰,另一类为不清晰.周围环境较安静与较嘈杂测试如表2和表3所示.

表2 误识别测试

表3 语音距离测试
表2显示本设计在较安静的环境、咬字清楚、语速正常的情况下,语音识别灵敏度高,基本没有误识别.当周围的环境较嘈杂时,语音识别灵敏度降低,会有误识别出现.
4.2有效距离测试
LD3320模块标准规格的识别距离为3 m,考虑到MIC灵敏度和实际运用等一些因素,将测试距离分为4 m, 3 m,2 m,1 m这4档来测试,并对使用者与训练器的MIC之间是否有无阻挡物进行测试.测试数据如表3所示.
从表3可以看出,语音识别的有效距离在3 m左右,使用者与训练器中间如果有阻挡物,基本上识别不到语音信号,与红外遥控的距离测试大致相同.由于标准羽毛球场地长13.4 m,宽6.1 m,步伐训练通常在半场离网2.6 m位置启动,因此完全可以满足训练的要求.
5 总结
本文针对传统训练器械智能化程度不高,功能单一和携带不方便等不足,设计制作了一款以非特定语音识别远程控制和红外遥控控制的羽毛球步伐训练器.对训练器多方位的实际测试与分析表明:该训练器操作简单,携带方便,并且具有多种基本步法和速度可调,能够使羽毛球初、中级爱好者快速掌握正确的羽毛球步伐,具有较好的实用性.
[1]李海林.基于模糊设计方法的羽毛球运动专项辅助练习器的优化设计[D].成都:西南交通大学,2011.
[2]苏鹏,周风余,陈磊.基于STM32的嵌入式语音识别模块设计[J].单片机与嵌入式系统应用,2011,11(2):121-130.
[3]金鑫,田犇,阙大顺.基于LD3320的语音控制系统设计实现[J].电脑与信息技术,2011,19(6):111-152.
[4]唐继贤.51单片机应用系统开发[M].上海:上海科学技术出版社,2012:112-120.
A Kind of Novel Badminton Footwork Training Device Based on Embeddedsystem
WANG Xiaoying,XU Quan
(School of Electrical and Automation Engineering,Changshu Institute of Technology,Changshu 215500,China)
Badminton is a kind of masssports for all ages,for it is easy to grasp.In order to enable the junior badminton enthusiasts to master the correct footwork quickly,this paper designed a kind of badminton footwork training device combined with voice and infrared remote control.Thesystem's hardware andsoftware framework andsome key procedures are given.A multi-faceted test and analysis verify that the footwork training device has a good performance withstability and practicability.
badminton footwork;speech recognition;infrared remote control
TP391.9
A
1008-2794(2015)04-0081-04
2016-04-10
国家自然科学基金项目“基于蚂蚁智能搜索行为的多细胞自动跟踪及其应用研究”(61273312)
王小英,副教授,工学博士,IEEE计算机协会会员,研究方向:嵌入式实时系统、计算机网络,E-mail:xiaoying_wang@cslg.edu.cn.
猜你喜欢
小主人报(2022年1期)2022-08-10
机械设计与制造(2022年5期)2022-05-19
装备制造技术(2020年1期)2020-12-25
商情(2019年37期)2019-08-21
小资CHIC!ELEGANCE(2018年32期)2018-11-05
汽车维护与修理(2015年6期)2015-02-28
学习月刊(2015年23期)2015-02-26
科普童话·百科探秘(2014年11期)2014-11-21
枣庄学院学报(2014年5期)2014-08-27
语文教学与研究(2014年11期)2014-02-28
