
基于HTCPN的列车追踪车地通信过程建模研究
2016-10-21 09:52张娟娟吴昕慧任国彬王维华
铁道标准设计 2016年9期
张娟娟,吴昕慧,任国彬,王维华
(1.柳州铁道职业技术学院电子技术学院,广西柳州 545616;2.陕西交通职业技术学院信息工程系,西安 710018)
基于HTCPN的列车追踪车地通信过程建模研究
张娟娟1,吴昕慧1,任国彬2,王维华2
(1.柳州铁道职业技术学院电子技术学院,广西柳州545616;2.陕西交通职业技术学院信息工程系,西安710018)
为了对高速铁路移动闭塞系统(Moving Automatic System,简称MAS)进行更加精确的仿真,利用CPN Tools建立高速铁路列车追踪运行车地通信过程的CPN模型,应用CPN ML语言模拟无线通信模型中数据包的丢包现象;引入时间标志对模型中数据传输的时间特性进行分析。仿真过程中为模型各个控制环节定义数据采集监控器,连续仿真3次分析追踪运行车地通信信息传输的时间特性。结果表明:该分析方法可以得到准确的性能分析报告,仿真结果对高速铁路中MAS系统开发阶段的形式化验证具有一定的借鉴意义。
高速列车;追踪运行;车地通信;HTCPN;性能分析
1 概述
CTCS-4级列控系统是完全基于无线传输信息的列车运行控制系统,可以实现虚拟闭塞或者移动闭塞[1],CTCS-4 级地面可取消轨道电路,由无线闭塞中心(RBC)和列控车载设备共同完成列车定位和完整性检查,地面不设通过信号机,机车乘务员凭车载信号行车。
根据我国铁路列控系统发展的战略规划,CTCS-4级列控系统是高速铁路发展的必然趋势。因而有必要搭建一个MAS仿真模型,对该系统进行仿真分析。高级Petri网引入了时间、颜色集以及层次结构等概念,因而可以对时间敏感的复杂过程用结构化、容易理解的方式建模并进行性能分析[2]。
CPN Tools支持多种随机概率分布,同时支持连续模拟,建模过程中可以定义各种数据采集监控器以便仿真时提取各种数据,从而生成更加精确的性能分析结果[3],根据这些结果可以对系统进行评价与改进。
本文在分析CTCS-3级列控系统车载设备总体结构的基础上,结合MAS基本原理要求[5-13],利用Petri网仿真工具CPN Tools建立了移动闭塞条件下两车追踪运行过程模型,仿真研究列车追踪运行过程中车地间信息的传输过程以及时间延迟情况。
2 车地通信原理分析
2.1列控车载系统结构分析
郑西线采用CTCS3-300S型列控车载系统,列控车载系统体系结构如图1所示。

图1 列控系统车载设备结构
由图1可以看出,列控系统车载设备结构[4]主要包括以下几个方面。
TCR(Track Circuit Reader):轨道电路信息读取器,通过TCR天线接收到轨道上的电气信号后,确定载频并解调其中的低频信息,根据低频判断地面信号码。
BTM(Balise Transmission Module):应答器信息接收模块,BTM主机通过车载天线向下发送27 MHz能量激活地面应答器,接收和处理应答器向车载天线返回的4.23 MHz上行链路信号。
RTM(Radio Transmission Module):无线通信模块,通过移动终端与无线网络连接。
DMI(Driver Machine Interface):人机接口,即列控车载显示装置。
EVC(European Vital Computer):欧洲安全计算机,以故障安全原理动作的车载安全计算机。
RLU(Relay Logic Unit):继电器单元,将来自VC1、VC2的制动指令综合作为ATP设备的制动指令向继电器接点输出。
2.2列控系统地面设备
CTCS-3级列控系统地面设备由无线闭塞中心(RBC)、临时限速服务器(TSR)、车站联锁(CBI)、ZPW-2000(UM)系列轨道电路、应答器(含LEU)等组成。
列控系统车地通信原理如图2所示。

图2 列控系统车地通信原理
3 高速列车追踪运行过程建模
根据对移动闭塞下车地通信原理以及列车追踪运行原理的分析,以郑西高铁2014年01月19日16时00分至16时03分G87次列车运行过程中传输的部分数据为基础,利用CPN Tools工具建立区间两车追踪运行的CPN模型。
3.1两车追踪车地通信顶层模型
顶层模型主要体现了移动闭塞条件下两车追踪运行时车地间的通信信息传输过程,顶层模型结构如图3所示。
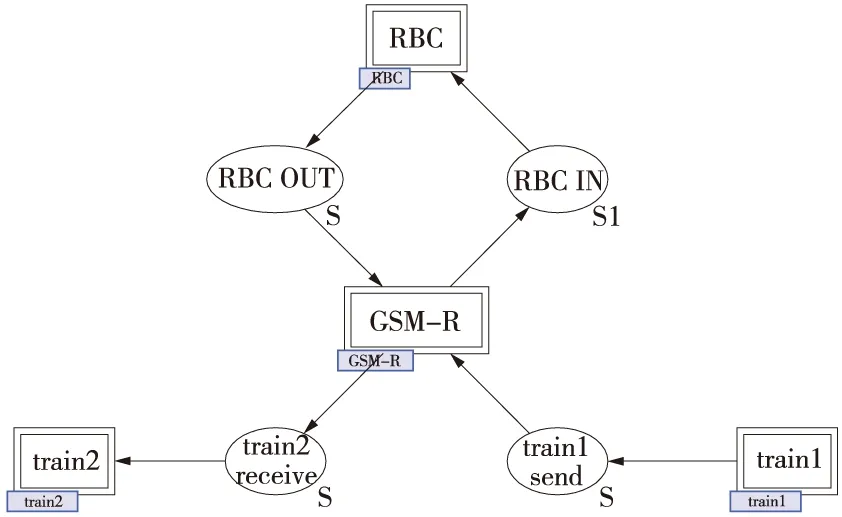
图3 高速列车追踪运行车地通信顶层模型
模型中包括4个替代变迁:train1、train2、RBC以及GSM-R。train1、train2分别模拟前、后行列车,两列车子模型并行运行;GSM-R用于模拟铁路数字移动通信系统;RBC用于模拟地面无线闭塞中心。替代变迁所对应的子页用于描述各模块中详细的信息传输过程。
3.2两车追踪后行列车车载ATP模型
后行列车模块主要体现了CTCS3-300S型车载设备介绍(前后行列车车载模块基本一致,故前行车车载模块不再介绍),如图4所示。
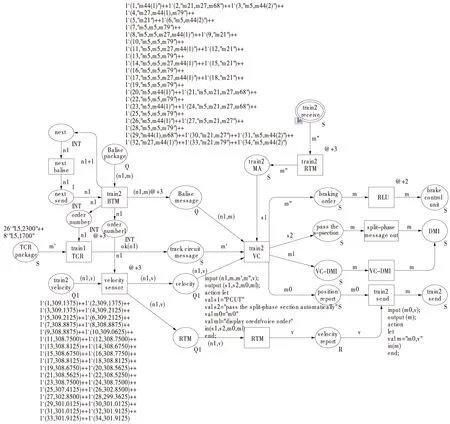
图4 后行列车车载ATP设备模型
由图4可以看出,车载设备模块实现了车载安全计算机与地面应答器、轨道电路、列车测速传感器以及RBC之间的信息传递过程。
车载安全计算机VC通过与RTM通信输入来自RBC的无线报文;通过与BTM通信输入Balise报文;通过和TCR通信输入轨道电路信息;通过来自速度传感器的速度信号,生成速度核查模式,将制动指令输出给RLU;通过和DMI通信输入按键操作以及输出显示/声音/语音命令。
地面应答器主要实现列车定位,同时传输进路参数、线路参数、临时限速等信息,通过查询、应答的方式,BTM将得到的应答器报文数据传输给列车运行监控装置或者列控车载设备。
TCR将接收的载频种类以及解调后的低频信息发送给VC。
根据文献[4-9]模型图中的时间设置为:车载设备接收信息应变时间不大于3.5 s,模型中取3 s;列车超速至车载设备给出制动指令时间为2 s。
3.3地面RBC模块图
RBC根据前行列车传递的位置报告以及速度信息等生成行车许可MA,并且通过GSM-R网络将MA发送给后行列车车载设备,与此同时发送许可范围内的坡度,线路描述,应答器链接及静态速度等数据。以便车载设备生成目标距离速度控制曲线。RBC响应时间为1 s。地面RBC模型如图5所示。

图5 地面RBC模型
3.4GSM-R模块图
GSM-R(GSM for Railways)系统是专门为铁路通信设计的全球移动通信系统,用以实现车地之间连续、双向、大容量的信息传输。GSM-R系统模型如图6所示。

图6 GSM-R系统模型
模型中,通过定义success函数来模拟实现数据包丢包现象,success函数定义如下。
globref successrate=0.95;
fun success()=uniform(0.0,1.0)<=!successrate;
首先定义一个全局变量successrate的值为0.95,而后调用变量successrate的值并利用CPN Tools中的均匀分布函数uniform(a,b)来定义success()函数,所定义的函数说明数据包发送的成功率为95%。
4 仿真及结果分析
4.1数据监控器的定义
CPN Tools支持定义多种Monitor,用于从模型所处的状态以及所发生的变迁中检查并提取性能分析所需要的数据。不同的Monitor可以满足不同的目的,主要分以下几种[8]。
Data collection Monitor:用于从模拟过程中提取数字数据或者计算提取数据的统计数据作为系统性能评价的数据资料;计算特定库所托肯的数量以及特定变迁发生的次数;计算模型的队列长度,响应时间等性能参数。
Marking size monitor:用于提取仿真过程中特定库所中的托肯数目。
Count transition occurrences Monitor:用于计算仿真过程中特定变迁的发生次数。
本文所建立的列车追踪运行车地通信过程模型定义了10个监控器函数,其中包括4个Data collection Monitor,4个Marking size Monitor,2个Count transition occurrences Monitor。各个监视器的具体功能如下。
4个Data collection Monitor分别是前行列车的brake control Monitor,DMI Monitor与RBC receive Monitor,transmit delay Monitor。其中brake control Monitor添加在前车子页的制动控制单元(brake control unit)库所上,用于统计制动控制单元库所中的托肯数目等性能分析数据;同样,DMI Monitor添加在前车DMI库所上,RBC receive Monitor添加在GSM-R子页的RBC receive库所上,均是用于检查相应库所中的托肯。transmit delay Monitor作用在GSM-R子页的transmit up变迁上,用于统计车地通信模型中的信息传输延迟时间。
由于篇幅的限制,这里只介绍一个monitor监视函数:transmit delay Monitor监视函数,本函数涉及到变迁transmit up。通过模型中随机分布函数Delay()加上其余环节固定延迟时间7得到系统总延迟时间。其中由于车载设备与RBC交换数据所需的时间为15~20 s,因而模型中定义数据传输时延Delay()如下:
fun Delay()=discrete(15,20);
离散概率分布函数discrete(a,b)用以随机产生15~20之间的任意整数[14]。
该监视器的predicate function定义如下:
fun pred (bindelem)=
let
fun predBindElem (GSM’transmit_up (1, {m}))=true
| predBindElem _=false
in
predBindElem bindelem
end
每当变迁transmit up发生,即通信系统上行链路传输数据时,transmit delay Monitor的predicate function返回true,此时observation function被调用,实现时延数据采集[15]。因而在一个数据采集器中,真正用于实现采集数据的函数是observation function,其定义如下:
fun obs (bindelem)=
let
fun obsBindElem
(GSM’transmit_up (1, {m}))=Delay()+7
| obsBindElem _=~1
in
obsBindElem bindelem
end
4.2系统的性能分析
仿真过程中,为尽量避免单次试验产生的偏差,本文利用ML语言定义对系统模型进行3次连续仿真计算,连续仿真ML语言定义如下:
Apply the Evaluate ML tool the text below to run 3 simulations of the CP-net.
CPN’Replications.nreplications 3.
仿真的步数设定为1 000步,仿真得到的部分性能数据统计信息如表1~表4所示。
由表1可以看出,仿真分别对库所RBC receive以及后行列车子页中的DMI,brake control unit,train2 send等4个库所添加了Marking size monitor,经过3次连续仿真得到4个库所中的平均时间托肯数目分别为21.115 385,5.384 615,2.692 308,2.692 308。即单位仿真时间内库所的托肯数目。此外,统计信息还包括置信区间分别为90%,95%以及99%时各库所中托肯数目的时间平均值,例如,库所RBC receive的时间平均托肯数目为21.115 385,则置信区间为90%,95%,99%时的平均托肯数目估计区间分别21.115 385±2.754 605,21.115 385±3.301 910,21.115 385±4.401 451。置信区间通常用于评价系统性能评估的精确度。可以看出RBC接收单元接收数据包的单位仿真时间的托肯数目估计值随置信水平越高,其置信区间越大。

表1 时间统计信息
表2为变迁time delay发生次数统计信息表,对照GSM-R子页的模型图可以看出,其前一个变迁后的弧函数描述为:
if success()
then 1`"m0,v"
else empty
该函数用于模拟上行链路数据包丢失现象,因而通过统计弧函数后方的第一个变迁的发生次数即可得知数据包丢失数目的统计信息。如表2所示:3次连续独立仿真得到的平均发生次数为32.333 333,最小值为31,最大值为33,即:在数据包丢失率设为95%时上行链路数据包最多丢失3个,最少丢失1个。由于模型总共设置了34个待发送的数据包,因而,其置信区间取置信水平为90%时的区间:32.333 333±1.946 667。
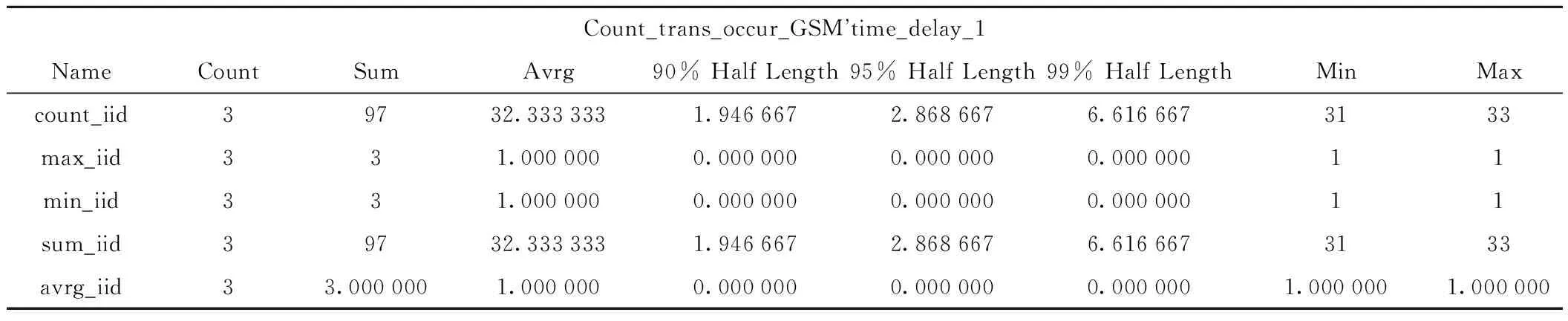
表2 变迁time delay发生次数统计信息
表3为变迁train2 recieve发生次数统计信息表,同样对照GSM-R子页的模型图可以看出,该表是用于统计数据包在整个传输过程(包括上下行链路)中的数据包丢失情况。从表3可以看出,经过3次连续独立的仿真,得到发送成功的数据包数目统计值,其平均值为31.000 000,最小值为30,最大值为32。即数据包丢失率设为95%时整个传输过程数据包最多丢失4个,最少丢失2个。同样,置信区间取置信水平为90%时的区间:31.000 000±1.685 863。

表3 变迁train2 recieve发生次数统计信息
表4为3次连续独立仿真得到的关于车载设备与RBC之间通信时延的独立同分布IID(independent and identically distributed)统计信息,只有独立同分布的数据才可以计算得其精确的置信区间。由表4可以看出:通信时延的平均值为24.833 333,同时置信区间为99%时的时延区间为24.833 333±1.916 665。

表4 信息传输延迟时间统计信息
图7为利用第二次、第三次独立仿真生成的transmit_delay.log文件在gnuplot绘图工具中绘制而成的通信时延随机分布图,横坐标代表通信时延时间,纵坐标代表变迁transmit up的发生次数,从图中可以看出,整个仿真过程中变迁transmit up共发生34次,通信时延多数分布在23~26,与置信区间为99%时的通信时延估计区间24.833 333±1.916 665基本一致。

图7 车地通信信息传输时延
5 结语
本文利用分层赋时有色Petri网建立了高速列车追踪运行车地通信过程的CPN模型,综合车地通信时延及数据包丢包等现象对模型做了性能分析,得出通信时延的置信区间分析以及制动控制装置等关键输出设备的时间平均输出特性,为未来高速铁路MAS的系统开发提供理论参考。
[1]胡晓辉,陈慧丽,石广田,等.CTCT-4级安全通信协议的形式化建模与验证[J].计算机工程与应用,2014,50(4):81-85.
[2]袁崇义.Petri网原理与应用[M].北京:电子工业出版社,2005:1-4.
[3]朱连章,隋瑞升,孔莹莹.基于CPN Tools的性能评价仿真研究[J].微计算机应用,2008,29(4):78-81.
[4]中华人民共和国铁道部.铁科技运[2008]34号CTCS-3级列控系统总体技术方案(V1.0)[S].北京:中国铁道出版社,2008.
[5]邓紫阳.基于着色Petri网CTCS-3级列控中心建模与仿真研究[D].北京:北京交通大学,2009.
[6]李庆欢.基于HTCPN的区域控制器列车追踪的建模研究[D].成都:西南交通大学,2014.
[7]陈徽,邹仕顺,辛骥.基于移动闭塞的列车追踪及其安全性分析[J].铁道通信信号,2009,45(4):18-20.
[8]张乐伟.基于赋时分层着色Petri网的工作流建模与性能评价[D].北京:中国石油大学,2009.
[9]潘登,郑应平.高速列车追踪运行的控制机理研究[J].铁道学报,2013,35(3):53-61.
[10]张伟华.移动闭塞条件下高速列车运行间隔研究[D].北京:北京交通大学,2009.
[11]梁楠.基于随机Petri网的CTCS-3级RBC系统控车流程建模与分析[D].北京:北京交通大学,2009.
[12]曹源.高速铁路列车运行控制系统的形式化建模与验证方法[D].北京:北京交通大学,2011.
[13]宁滨.轨道交通系统中的列车运行追踪模型及交通流特性研究[D].北京:北京交通大学,2005.
[14]Kurt Jensen, L.M.Kristensen, L.Wells. Colored Petri Nets and CPN Tools for modeling and validation of concurrent system[J]. Springer, 2007:242-250.
[15]Kurt Jensen, Lars M. Kristensen.Coloured Petri Nets[M]. Springer-Verlag Berlin Heidelberg, 2009:278-299.
Modeling Study of HTCPN-based Train-to-wayside Communication Process for Train Tracking
ZHANG Juan-juan1, WU Xin-hui1, REN Guo-bin2, WANG Wei-hua2
(1.Department of Electronic Engineering, Liuzhou Railway Vocational Technical College, Liuzhou 545007, China;2.Department of Information Engineering, Shaanxi College of Communication Technology, Xi’an 710018, China)
For accurate simulation of MAS system of high-speed railway, CPN model of train-to-wayside data communication process for high-speed train tracking operation is established with CPN Tools, and packet loss phenomenon of wireless communication is modeled by CPN ML language. The time characteristics of the data transmission are analyzed by the introduction of the time stamp. The data acquisition monitor is defined for various control modules during simulation, and the temporal characteristics of train-to-wayside communication information transferred during tracking operation are analyzed by continuous three simulations. The results show that the analytical method can obtain more accurate performance report and the simulation results are of some significance for the formal verification of the MAS system development process in high-speed railway.
High-speed train; Tracking operation; Train-to-wayside data communication; HTCPN; Performance analysis
2016-02-28;
2016-03-28
张娟娟(1988—),女,助教,2012年毕业于兰州交通大学自动化(自动控制)专业,工学学士,E-mail:1192941459@qq.com。
吴昕慧(1961—),女,副教授,1988年毕业于上海铁道学院,工学学士,E-mail:ltyxwxh@163.com。
1004-2954(2016)09-0146-06
U238;U284.44
ADOI:10.13238/j.issn.1004-2954.2016.09.032
猜你喜欢
杭州师范大学学报(自然科学版)(2021年6期)2021-12-07
湖北师范大学学报(自然科学版)(2021年3期)2021-09-08
数学物理学报(2021年1期)2021-03-29
华侨大学学报(自然科学版)(2020年1期)2020-02-27
铁道通信信号(2020年8期)2020-02-06
铁道通信信号(2018年9期)2018-11-10
移动信息(2018年10期)2018-11-04
科技传播(2017年23期)2018-01-10
天津科技大学学报(2015年2期)2015-08-09
中国铁道科学(2015年4期)2015-06-21
