BDS/GPS组合RTK定位性能分析
2016-10-17 02:37:03满小三孙付平潘国富
测绘工程 2016年12期
满小三,孙付平,潘国富,丁 赫,刘 帅,吴 帅
(1.信息工程大学 导航与空天目标工程学院,河南 郑州 450001; 2.广州中海达卫星导航技术股份有限公司,广东 广州 511400)
BDS/GPS组合RTK定位性能分析
满小三1,孙付平1,潘国富2,丁赫1,刘帅1,吴帅1
(1.信息工程大学 导航与空天目标工程学院,河南 郑州 450001; 2.广州中海达卫星导航技术股份有限公司,广东 广州 511400)
针对单系统RTK存在可见卫星数少等问题,文中研究BDS/GPS站间单差的RTK算法模型,该模型采用二次型函数部分最小化及LAMBDA方法联合搜索模糊度。利用该模型分析BDS/GPS组合RTK的定位性能,通过短基线实测数据分析表明:站间单差RTK模型与双差模型是等价的;BDS/GPS组合系统相比于单一系统,明显提高定位的稳健性和精度,改善模糊度固定的成功率。
站间单差;BDS/GPS;RTK;二次型函数部分最小化;LAMBDA
北斗卫星导航系统(BDS)于2012年底已提供区域卫星导航定位服务,计划于2020年完成全部星座的布设,并提供全球卫星导航定位服务[1]。北斗卫星导航系统是继美国GPS,俄罗斯GLONASS系统之后第3个建成的全球卫星导航系统。相比于单一卫星导航系统,多系统组合将显著增加可视卫星数目、改善卫星空间几何结构,从而提高导航定位的可用性、连续性和精度。多系统组合导航定位将是必然的发展趋势[2]。
目前,很多文献对BDS/GPS组合系统RTK做了相关研究,但主要是基于双差模型,对单差模型的RTK相关研究比较少。文献[3]对基于GPS/BDS组合系统的短基线单频模糊度搜索进行研究,研究结果表明组合系统的模糊度搜索成功率高于单一系统。文献[4-5]对GPS/BDS组合单频RTK进行研究,表明组合单频RTK定位精度及模糊度固定成功率高于单一系统。
本文主要研究BDS/GPS站间单差的RTK算法模型。同时,对模糊度解算采用单历元搜索方式,避免繁琐的周跳探测,减少运算量。对比分析站间单差模型与双差模型的优劣及BDS/GPS组合RTK的定位性能。
1 站间单差的RTK数学模型
1.1基本观测方程
假定r表示接收机号,r=1,…,nr,nr表示跟踪BDS,GPS卫星的接收机数量。s*表示卫星号,s*=1*,…,ms*,ms*表示接收机接受的卫星数,*表示系统号(B表示BDS卫星,G表示GPS卫星);j*表示频率号,j*=1*,…,f*,f*表示*系统的频率数。则BDS,GPS的码和载波相位非差观测方程可以统一表示为
(1)
(2)

假定接收机相位硬件延迟一阶多项式可以表示为
(3)
式中:μr,f*,φ表示为未知数。对于GPS,BDS系统而言,μr,f,φ非常小。因此,可以认为接收机硬件相位延迟只与接收机频率有关,而与卫星无关。即
(4)
1.2函数模型
假设基准站与流动站共同观测到n颗GPS卫星,m颗BDS卫星。则站间单差模型为:通过基准站与移动站之间进行站间作差,即式(1)、式(2)分别在站间作差(1表示基准站,2表示移动站),获取码伪距和载波相位观测值的单差观测方程,即单一系统的码伪距和载波相位单差方程可以表示为
(5)
(6)
对于短基线,可以基准站与流动站的大气延迟误差相等,卫星硬件相位、码延迟可以假定为常数(其随时间变化比较小)。即单差之后,大气延迟误差、卫星硬件相位、码延迟、多路径效率被消除。
对式(5)、式(6)线性化(忽略上下标注),可以表示为
(7)
(8)
其中,A为2n+2m×3设计矩阵,e为n+m×1维元素都为1的矩阵。
未知参数:
接收机相对三维位置:
单差接收机钟差:

单差模糊度:
单差接收机硬件码延迟:
单差接收机硬件相位延迟:
对式(7)、式(8)中的未知参数作一定的组合,即对GPSf1硬件码延迟与接收机钟差组合;接收机硬件相位延迟与单差模糊度组合,则单差模糊度变为实数。即式(7)、式(8)可以表示为
(9)
(10)

则式(9)、式(10)采用矩阵形式统一表示为

(11)
其中:
2 单差RTK 模糊度的固定
2.1模糊度固定
对于式(11),单差模糊度为实数,因此不能直接采用LAMBDA方法搜索模糊度,需要在利用LAMBDA方法之前对单差模糊度做一定的处理。
由于式(4)可知,式(11)中的相同频率的单差模糊度具有相等的小数部分。因此可以对每个频率选取一个参考单差模糊度,通过组差方式获取整周模糊度(即为双差模糊度)。
(12)
对式(12)利用二次型函数部分最小化,可以得出式(13)。
二次型函数部分最小化[6],主要分为两步:
第一步:
(13)
n为单差模糊度(实数),表示为

则式(13)可以重新表示为
(14)
第二步:
(15)
利用二次型函数部分最小化可得
(16)

式(16)可以重新表示为
(17)

2.2模糊度固定成功率
整周模糊度解算是否正确直接影响RTK定位的精度。而模糊度固定的性能可以通过模糊度固定率来体现,即模糊度固定率可以表示为[8]
(18)
式中:NCF表示固定的历元个数;NT表示解算的整个历元总数。因此,模糊度固定失败率为:PfE=1-PSE。
整周模糊度即使固定,也不一定固定正确,为更好的反映整周模糊度固定正确与否,可以通过模糊度固定成功率体现,模糊度固定成功率表示为
(19)
式中:NSF表示正确固定的历元个数;NCF表示固定的历元个数。
3 算例分析
采用GPS/BDS双系统双频兼容型中海达接收机,在广州番禺区实测一组长度为8 km的短基线,两个站点的坐标精确已知。采样间隔为1 s,截止高度角为15°。对同类观测值之间,采用卫星高度定权方法对观测值进行定权,不同类观测值之间,采用经验值定权。例如,载波相位观测值与码观测值的权比为100∶1。首先,分别从定位精度及模糊度固定成功率方面,对比分析单差模型与双差模型的RTK,如表1~表4所示;其次,分析基于单差模型BDS/GPS RTK的定位性能,采用以下3种方案进行对比分析:①GPS;②BDS;③BDS/GPS,如图1~图6所示。
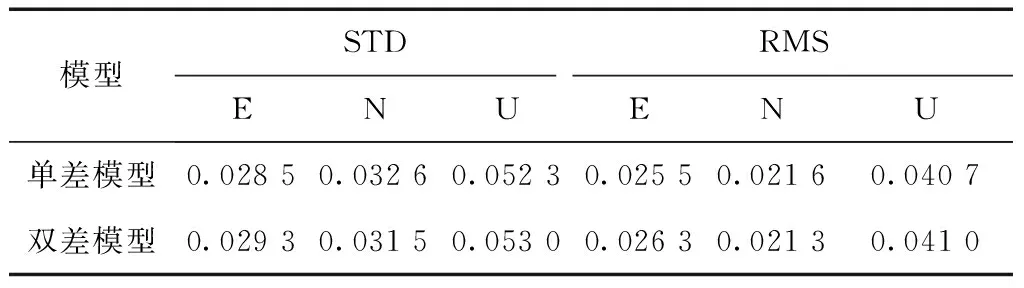
表1 单差模型与双差模型RTK在E、N和U方向的STD、RMS值
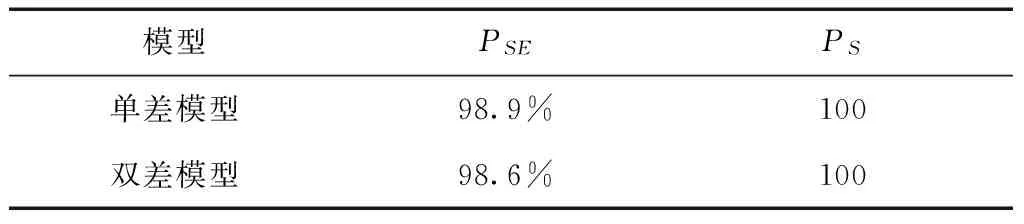
表2 单差模型与双差模型RTK的模糊度固定率及模糊度固定成功率
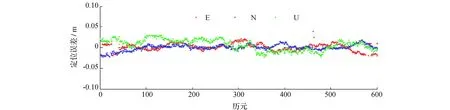
图1 基于双差模型的BDS/GPS RTK的定位误差
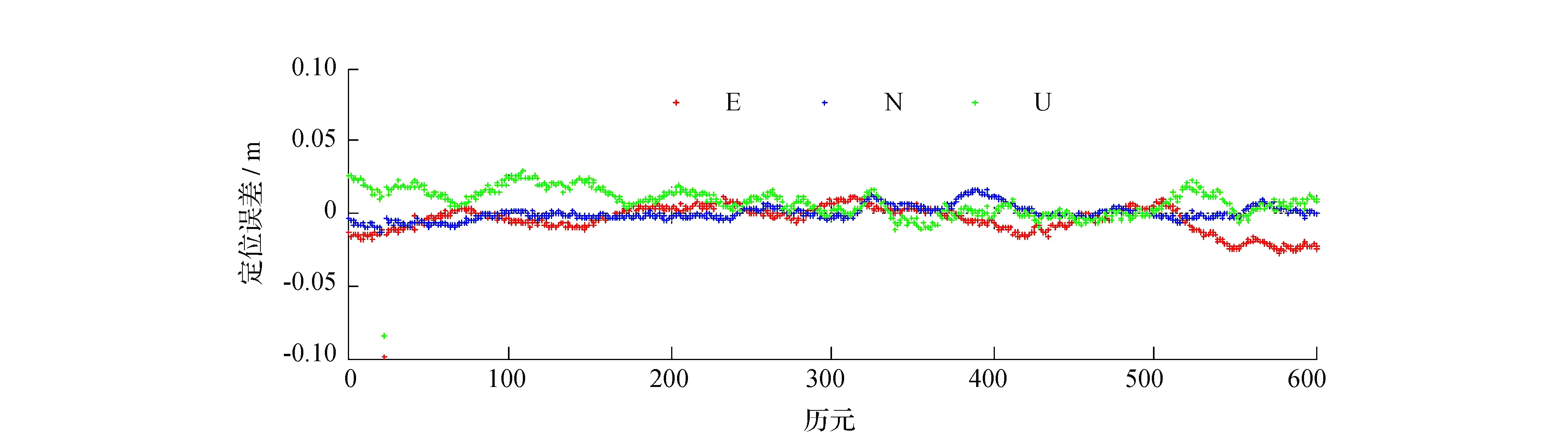
图2 基于单差模型的BDS/GPS RTK的定位误差
通过图1~图2可以看出,不论是双差模型还是单差模型BDS/GPS RTK 3个方向的定位误差都在厘米级。从表1可以看出,单差模型的BDS/GPS RTK定位精度与双差模糊的定位精度相当,单差模型(双差模型)BDS/GPS RTK在E,N和U方向的定位误差分别为2.55 cm(2.33 cm),2.16 cm(2.35 cm)和4.07 cm(4.50 cm)。从表2可以看出,单差模型BDS/GPS RTK的模糊度固定率及模糊度固定成功率与双差模型相当。单差模型(双差模型) BDS/GPS RTK的模糊度固定率及模糊度固定成功率为98.9%(98.6%)、100%(100%)。可以看出:单差模型RTK与双差模型的RTK是等价的。
通过图3可以看出,BDS/GPS组合系统的可见卫星数明显多于BDS或GPS单一系统,为在城市、峡谷等观测环境比较差的环境中,保证定位解算所需的卫星数,提供连续定位的可能。BDS/GPS组合系统的PDOP值明显低于BDS或GPS单一系统,在整个观测期间,BDS/GPS组合系统的PDOP值低于2。

图3 3种方案的可见卫星数及PDOP值

方案STDENURMSENUBDS0.03540.04040.04760.03440.03270.0452GPS0.03130.03580.04490.02850.02320.0436BDS+GPS0.02850.03260.04230.02550.02160.0407
通过图4~图6可以看出,BDS/GPS组合系统及单系统BDS,GPS,RTK 3个方向的定位精度都在厘米级。但是BDS/GPS 组合系统RTK定位精度优于单系统BDS,GPS。BDS RTK定位精度稍微低于GPS。通过表3可以看出,BDS/GPS组合系统RTK在E,N和U方向的定位精度分别为2.55 cm、2.16 cm和4.07 cm,其定位精度优于单系统BDS(3.44 cm、3.27 cm和4.52 cm)、GPS(2.85 cm、2.32 cm和4.36 cm)。BDS RTK定位精度稍微低于GPS。表4可以看出,BDS/GPS组合系统的模糊度固定率(98.9%)优于单系统BDS(96.8%)、GPS(98.1%);模糊度固定成功率相当。

表4 3种方案的模糊度固定率及模糊度固定成功率

图4 BDS RTK在E,N和U方向的定位误差
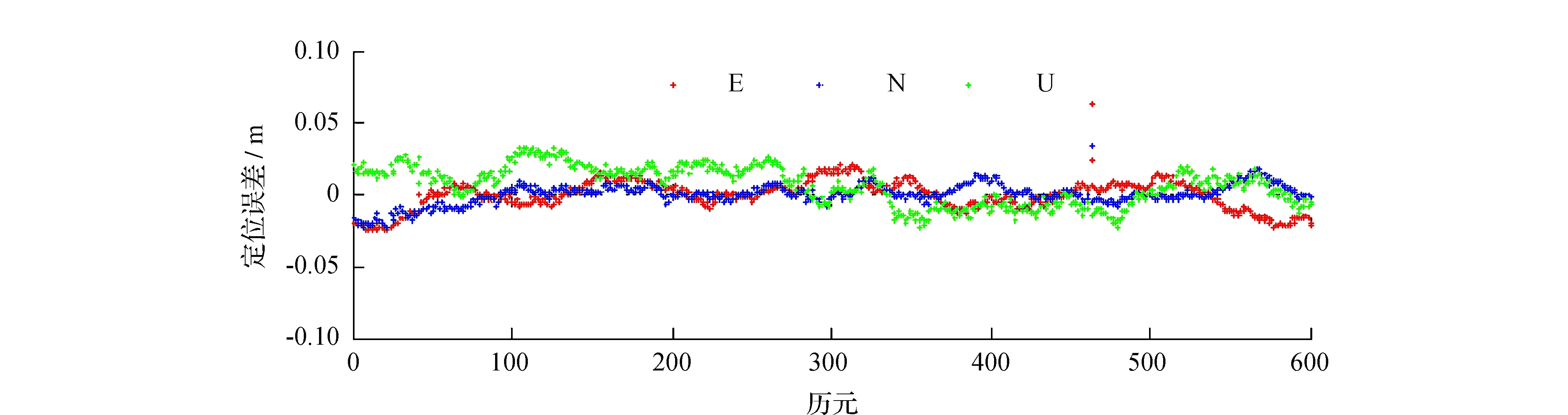
图5 GPS RTK在E,N和U方向的定位误差
图6 BDS+GPS RTK在E,N和U方向的定位误差
4 结 论
本文研究站间单差的RTK算法模型,基于该算法模型分析短基线BDS/GPS组合系统RTK定位的性能,得出以下结论:1)站间单差模型的RTK与双差模型是等价的;2)BDS/GPS组合RTK定位精度优于单系统BDS,GPS,且其模糊度固定率优于单系统;3)GPS RTK的定位精度及模糊度固定率稍微优于BDS。
[1]宁津生,姚宜斌,张小红.全球导航卫星系统发展综述[J].导航定位学报,2013,1(1):3-8.
[2]MAN X, SUN F.Analysis of positioning performance on combined BDS/GPS/GLONASS[C].China Satellite Navigation Conference(CSNC),2015.
[3]ODOLINSKI R,TEUNISSEN P J G.First combined COMPASS/BeiDou-2 and GPS positioning results in Australia Part I:Single-receiver and relative code-only positioning[J].Journal of Spatial Science,2013.
[4]ODOLINSKI R,TEUNISSEN P J G.First combined COMPASS/BeiDou-2 and GPS positioning results in Australia Part II:Single-receiver and relative code-only positioning[J].Journal of Spatial Science,2013.
[5]ODOLINSKI R,TEUNISSEN P J G.Quality analysis of a combined COMPASS/BeiDou-2 and GPS RTK positioning model [J].Global Navigation Satellite Systems Society IGNSS Symn,2013.
[6]LEICK A,RAPOPORT L,TATARNIKOV D.GPS Satellite Surveying[M].WILEY,2014.
[7]EUNISSEN P J L.The least squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation.Journal of Geodesy,1995,70:1-2,65-82.
[8]ODOLINSKI R,TEUNISSEN P J G.An analysis of combined COMPASS/BeiDou-2 and GPS single-and multiple-frequency RTK positioning[J].Proceeding of The Institute of Navigation PNT,2013.
[责任编辑:张德福]
Analysis of positioning performance on RTK combined with BDS/GPS MAN
Xiaosan1,SUN Fuping1,PAN Guofu2,DING He1,LIU Shuai1,WU Shuai1
(1.Information Engineering University, Zhengzhou 450001, China;2.Hi-Target Surveying Insitrument Co.,Ltd,Guangzhou 511400,China)
As to single-system RTK, the number of visible satellites is small. This paper studies the across-receiver of RTK algorithm model, which uses combined partial minimization of quadratic functions with LAMBDA method to search ambiguity. The model analyzes the positioning performance of RTK combined with BDS/GPS. The short baseline measurement data analysis shows that: the cross-receiver of RTK model is equivalent to double-difference model. Compared to a single system, the combined BDS/GPS system can significantly improve the positioning accuracy and robustness, and improve the success rate of ambiguity fixing.
across-receiver;BDS/GPS;RTK;partial minimization of quadratic function;LAMBDA
10.19349/j.cnki.issn1006-7949.2016.12.004
2015-07-09
满小三(1989-),男,硕士研究生.
P228
A
1006-7949(2016)12-0016-05
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
北京大学学报(自然科学版)(2022年4期)2022-08-18 06:41:26
大地测量与地球动力学(2022年1期)2022-01-11 10:23:02
大地测量与地球动力学(2021年10期)2021-04-17 00:51:00
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
铁道通信信号(2018年3期)2018-04-19 02:32:44
石油地球物理勘探(2017年4期)2017-12-18 07:14:49
铁道通信信号(2016年6期)2016-06-01 12:10:20
铁道通信信号(2016年3期)2016-06-01 12:10:18