螺旋桨-轴系-艇体耦合系统振动控制分析与试验
2016-10-14 07:53胡睢宁覃文源张志谊
噪声与振动控制 2016年3期
胡睢宁,覃 会,覃文源,张志谊
螺旋桨-轴系-艇体耦合系统振动控制分析与试验
胡睢宁1,2,覃会1,2,覃文源1,2,张志谊1,2
(1.上海交通大学 机械系统与振动国家重点实验室,上海 200240;2.高新船舶与深海开发装备协同创新中心,上海 200240)
针对螺旋桨非定常激励力经由推进轴系激励艇体结构从而诱发辐射噪声问题,提出一种轴系纵向振动主动控制方法,将纵振控制器对称安装于推力轴承座上,通过反馈控制抑制轴承座振动。对螺旋桨-轴系-艇体耦合系统进行振动建模、控制和声辐射仿真分析,结果表明由纵向激励引起的艇体振动和辐射噪声能够得到抑制。为验证纵振控制器效果,在推进轴系试验台上进行试验验证,结果表明主动控制能够有效抑制推力轴承基座的纵向振动。
振动与波;推进轴系;耦合系统;声辐射;纵振控制
隐身技术一直是各国发展的关键技术。声隐身可以通过降低噪声源强度和控制噪声传递途径实现,对于由螺旋桨非定常激励力经由推进轴系传递到艇体从而诱发艇体振动和声辐射问题,经过最近5~10年的研究认识已经达到了新的层次,然而新的控制方法及其效果的研究目前还有待深入[1-4]。由于推进轴系的纵向振动是引起艇体声辐射的主要原因,因此,降低艇体声辐射的最直接的方法就是降低由推进轴系传到艇体的纵向振动[5-8]。
针对轴系振动控制问题,本文建立螺旋桨-轴系-艇体耦合系统的有限元模型,并进行振动和声辐射分析,在此基础上,提出一种轴系纵向振动控制方案。该方案将纵振控制器对称安装于推力轴承座上,产生作用于轴系的控制力,几乎抵消脉动激励力的作用效果,从而有效抑制螺旋桨激励力所引起的耦合系统的振动以及由此诱发的艇体声辐射。最后,通过试验验证纵振控制器对轴系纵向振动的抑制效果。
1 耦合系统模型建立
耦合系统主要包括螺旋桨、轴系、基座和艇体四个部分,螺旋桨在艉轴末端与轴系耦合,轴系通过基座与艇体耦合,从而形成螺旋桨-轴系-艇体耦合系统[9]。耦合系统的结构示意图如图1所示。
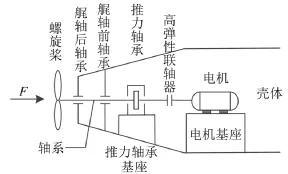
图1 耦合系统结构示意图
在有限元软件中建立螺旋桨-轴系耦合系统的有限元模型,如图2所示。螺旋桨-轴系与艇体耦合后,在外侧包围圆柱形水体,得到耦合系统有限元模型,如图3所示。

图2 螺旋桨-轴系耦合系统有限元模型
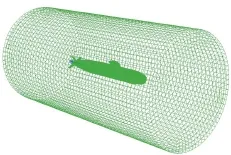
图3 耦合系统有限元模型
结构振动和声场特性联系紧密,结构振动在流体中辐射形成声场,声场反过来又对结构产生反作用力,从而形成“声固耦合”效应,使声场特性比较复杂。通过声振耦合系统研究艇体在无限流场中的声辐射特性[10]。
水下结构在简谐激励作用下,振动引起的外部流体声压满足波动方程、无限远处Sommerfeld辐射条件和流固耦合面边界条件,其表达式分别为
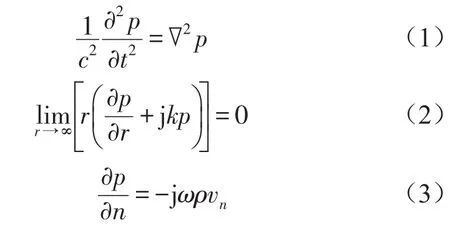
式中c——流体中的声速;k——波数;vn——流固耦合面上的法向振速;r——结构表面与流体域中任意两点的距离,r=|Q-P|,Q——结构表面任意点,P——流体域中任意点。
将波动方程化为单频声场Helmholtz积分方程。当P在结构表面上时,可以得到结构表面积分方程

式中G(P,Q)——波动方程基本解自有空间的格林函数,其表达式为

利用边界元法可得方程

式中[A]、[B]——系数矩阵。求解过程需要避免奇异积分和解不唯一的问题。
联立上式可得流固耦合面上的法向振速和声压,通过对流固耦合面进行面积分,可得水下结构辐射的声功率

2 作动器设计与分析
2.1作动器基本原理
电磁作动器一般由磁轭组件、衔铁组件组成,其中磁轭组件包括导磁体、磁钢以及磁钢托体,衔铁组件包括线圈、线圈骨架。当交变电流通入线圈后,线圈受到电磁力的作用,方向沿作动器轴向,而外磁钢由于受到周期变化的反作用力,会带动外圈做往复振动,从而产生控制力,实现对被控对象的控制。
线圈所受电磁力根据安培定律计算,即

式中F——安培力/N;B——磁感应强度/T;I——线圈电流/A;L——线圈长度/m。
由式8可知,当作动器结构确定之后,产生的作动力大小与线圈电流成正比关系。
作动器可以简化为单自由度系统,由作动器的可动部件和支承簧片组成的力学模型如图4所示。
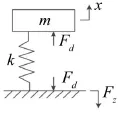
图4 作动器简化力学模型
设电磁作动器的可动部件质量为m,左右簧片复合刚度为k,作动器线圈所受电磁力为Fd,作动器对外输出的作动力为Fz。
电磁力作用下作动器的运动方程为

作动器对外输出的作动力为

由式(9)和式(10)可得

由式(11)可知,作动器对外输出的作动力与ω2成正比,所以当频率较高时,可以忽略kX项,从而可近似认为线圈所受电磁力Fd与作动器对外输出作动力Fz相等[11-12]。
2.2作动器设计与分析
为降低电磁作动器的漏磁,减小工作电流,增加作动力,提出一种双线圈的对称型电磁作动器,其三维模型如图5所示。该对称型作动器与一般作动器的区别在于采用双线圈结构,其作用原理与前述一致。
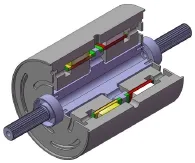
图5 对称型作动器三维模型
实际工作中,两个纵向振动控制器需要同步工作,所以同步性需要测试。测试结果如图6所示,图中Point 9和Point 10代表惯性振动加速度,Point 11代表输入电压。
由图6可知,共振频率在1.5 Hz附近,在两台纵向振动控制器串联工作时,其同步性能满足控制要求。
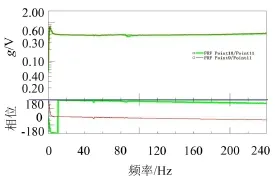
图6 串联工作的纵向振动控制器的频响特性
3 控制分析
在螺旋桨-轴系-艇体耦合系统中,将电磁作动器对称安装于推力轴承座上进行纵向振动控制,实际安装位置如图7所示。
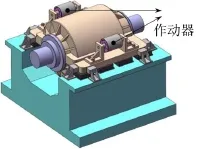
图7 作动器在耦合系统中的安装位置
3.1耦合系统传递特性分析
为从原理上分析控制对振动传递特性的影响,采用主动阻尼进行振动控制,等效阻尼取为1.24×107(N∙s/m)。拾取推力轴承座的纵向振动加速度,并将作动器安装前后耦合系统的纵向振动加速度进行对比,结果如图8所示。
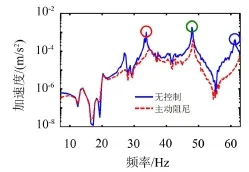
图8 纵向加速度响应对比
需要说明的是,进行耦合系统传递特性分析时,在螺旋桨叶片施加非均布载荷,等效纵向载荷为1 N,等效横向载荷为0.25 N。图8中标出的共振峰依次为轴系第1阶纵向振动、螺旋桨第一组桨叶模态和轴系第2阶纵向振动。
由图8可知,推力轴承的纵向振动加速度在所计算的频段均有明显降低,第1阶纵向振动降低了大约90%,第2阶纵向振动降低了大约50%,第一组桨叶模态振动降低了80%,说明控制有效降低了螺旋桨-轴系-艇体耦合系统的纵向振动。
3.2耦合系统声辐射分析
充分考虑螺旋桨、推进轴系、轴承座和艇体的耦合关系,采用有限元-边界元方法计算螺旋桨脉动激励力所导致的艇体水下声辐射,并将作动器安装前后的螺旋桨-轴系-艇体耦合系统的辐射声功率级进行对比,结果如图9所示。图中标出的声功率级依次为轴系第1阶纵向振动、螺旋桨第一组桨叶模态和轴系第2阶纵向振动。
由图9可知,在螺旋桨-轴系-壳体耦合系统中,轴系子系统第1阶纵向共振辐射声功率级降低了20.2 dB,第2阶纵向共振辐射声功率级降低了19 dB,螺旋桨第一组桨叶共振辐射声功率级降低了11.7 dB。
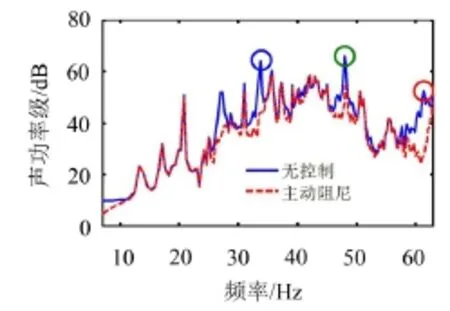
图9 安装前后耦合系统声功率级对比
综上可知,纵振控制器有效抑制了螺旋桨-轴系-艇体耦合系统的纵向振动,降低了由此诱发的艇体声辐射。
4 实验结果
针对图10所示的轴系试验台架进行振动控制效果试验,控制回路如图11所示。
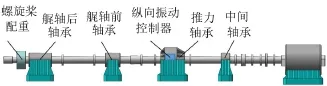
图10 试验轴系
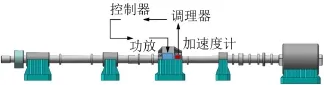
图11 纵向振动控制中的信号回路
对控制方法的效果进行量化评价。轴系运行转速按20 r/min、40 r/min、60 r/min、80 r/min、100 r/ min、120 r/min、140 r/min变化。
在转速为20 r/min时,控制结果如图12所示(深色为控制前振动,浅色为控制后振动)。图中Point 21代表推力轴承座纵向惯性振动加速度。由图12可见,推力轴承基座的纵向振动有较大程度衰减,功率谱幅值下降90%左右,5 Hz~200 Hz内的RMS值下降64%。在这个转速下,高频振动较小,控制前后几乎无变化。
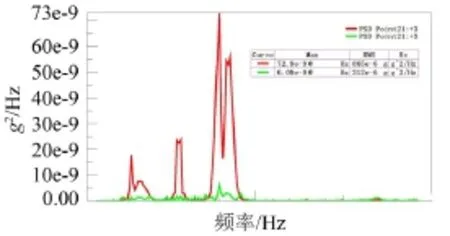
图12 20 r/min时推力轴承座纵振响应谱
对于轴系其它的运转速度,可以得到相应的轴系纵向振动的控制效果,结果如表1所示。可以发现,随着转速的升高,功率谱幅值下降基本在90%左右,5 Hz~200 Hz内的RMS值逐渐降低。
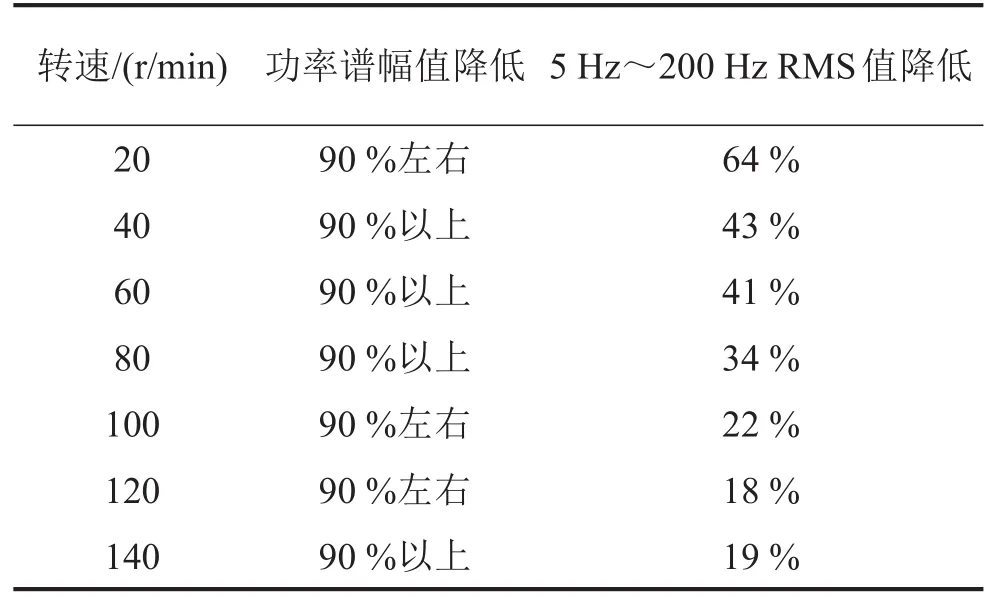
表1 不同转速下推力轴承座纵振控制效果
5 结语
本文建立了螺旋桨-轴系-艇体耦合系统有限元模型,将新设计的电磁作动器对称安装于推力轴承座上,然后对耦合系统进行振动控制和声辐射分析,最后通过轴系试验台验证纵振控制器对轴系振动的抑制效果,为耦合系统振动控制提供理论基础。主要结论如下:
(1)两台纵向振动控制器对称安装于推力轴承座上,串联工作时同步性较好,能够满足控制要求。采用主动阻尼,可以有效抑制螺旋桨-轴系-艇体耦合系统的纵向振动,降低由此诱发的艇体辐射噪声。
(2)纵振控制器在轴系试验台上具有良好的振动抑制效果。控制后,推力轴承座振动功率谱的幅值模型下降,5 Hz~200 Hz内的RMS值因转速不同都有不同程度的降低。
[1]张志谊.轴系-壳体耦合振动控制的试验研究[J].现代振动与噪声技术,2011(9):65-69.
[2]张赣波.船舶主推进轴系纵向振动主动控制方法研究[D].武汉:华中科技大学,2012.
[3]裴亚鲁.网结构振动传递与主动控制研究方[D].上海:上海交通大学,2014.
[4]唐艾飞.船舶推进轴系振动分析研究[D].武汉:武汉理工大学,1987.
[5]MURAWSKI L.Axial vibrations of a propulsion system taking into account the couplings and the boundary conditions[J].Journal of Marine Science&Technology,2004,9(4):171-181.
[6]GOODWIN A J H.The design of a resonance changer to overcome excessive axial vibration of propeller shafting [J].Transactions of the Institute of Marine Engineers,1960(72):37-63.
[7]FENG G P.Research on transmission paths of a coupled beam-cylindrical shell system by power flow analysis[J]. Journal of Mechanical Science&Technology,2009,23(8):2138-2148.
[8]CAO Y P,ZHANG W P.Using dynamic absorbers to reduce underwater structure noise due to longitudinal vibration of shafting[J].Journal of Harbin Engineering University,2007,28(7):747-751.
[9]李攀硕.轴-壳体系统耦合振动的建模与分析[J].振动与冲击,2012,31(5):128-131.
[10]曹贻鹏.推进轴系引起的艇体结构振动与辐射噪声控制研究[D].哈尔滨:哈尔滨工程大学,2008.
[11]胡芳,张志谊.含橡胶轴承轴系振动传递主动控制研究[J].振动与冲击,2014,33(20):63-69.
[12]李攀硕,张志谊.轴-壳体系统耦合振动控制原理分析及实验[J].机械工程学报,2012,48(19):103-108.
Analysis and Experiment for Vibration Control of a Propeller-shafting-hull Coupled System
HU Sui-ning1,2,QINHui1,2,QIN Wen-yuan1,2,ZHANG Zhi-yi1,2
(1.State Key Laboratory of Mechanical System and Vibration,Shanghai Jiaotong University,Shanghai 200240,China;2.Collaborative Innovation Center for Advanced Ship and Deep-Sea Exploration(CISSE),Shanghai 200240,China)
A new active method for controlling longitudinal vibration of shafting systems is presented to suppress the vibration of the propeller-shafting-hull coupled system induced by the propeller's oscillatory forces.The longitudinal vibration controller is symmetrically installed on the pedestal of the thrust bearing to suppress its vibration by feedback control.The vibration of the propeller-shafting-hull coupled system is modeled.On this basis,vibration control and acoustic radiation characteristics of the coupled system are analyzed.The results show that the vibration and radiated noise of the hull caused by the longitudinal excitation can be suppressed.Besides,a shafting experimental platform is set up to evaluate the control effect.Experimental results show that the active actuator can effectively reduce the longitudinal vibration of the pedestal of thrust bearings.
vibration and wave;propulsion shafting;coupled system;acoustic radiation;longitudinal vibration control
O328,O329
ADOI编码:10.3969/j.issn.1006-1335.2016.03.013
1006-1355(2016)03-0062-04+80
2016-01-19
胡睢宁(1989-),男,江苏省徐州市人,硕士生,主要研究方向为噪声振动控制。E-mail:hsn8264875@126.com
张志谊,男,博士生导师。E-mail:chychang@sjtu.edu.cn
猜你喜欢
船舶与海洋工程(2022年6期)2023-01-12
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
中国舰船研究(2022年2期)2022-04-26
防爆电机(2022年1期)2022-02-16
制造业自动化(2019年9期)2019-09-27
制造技术与机床(2019年8期)2019-09-03
西安航空学院学报(2017年3期)2017-07-05
中国铸造装备与技术(2017年3期)2017-06-21
中国舰船研究(2016年6期)2016-12-12